Вынужденные колебания. Резонанс. Автоколебания
Если колебания совершаются под воздействием внешней силы, они называются вынужденными. Работа внешней силы, которая обеспечивает колебательную систему энергией, при этом является положительной. Благодаря ей колебания не затухают и могут противодействовать силам трения.
Внешняя сила не обязательно должна быть постоянной. С течением времени она может изменяться по разным законам. Особый случай – воздействие на колебательную систему внешней силы, которая изменяется по гармоническому закону с частотой, равной ω , в то время как сама система совершает собственные колебания с той же самой частотой.
Установившиеся вынужденные колебания всегда происходят с частотой внешней силы. Частоту свободных колебаний определяют параметры системы.
Когда внешняя сила начинает воздействовать на колебательную систему, должно пройти некоторое время Δ t , прежде чем вынужденные колебания установятся. Это время будет равно тому времени τ , за которое затухают свободные колебания в данной системе.
В момент начала воздействия в системе начинают происходить два процесса одновременно – свободные колебания с собственной частотой ω 0 и вынужденные с частотой ω . Однако из-за сил трения свободные колебания в определенный момент затухают, поэтому по прошествии времени в системе сохраняются лишь стационарные колебания с той частотой, которая соответствует внешней (вынуждающей) силе.
Разберем пример. У нас есть тело на пружине, совершающее вынужденные колебания (см. иллюстрацию ниже). Приложим внешнюю силу, обозначенную F → в н , к свободному концу пружины, после чего этот конец начнет перемещаться по закону, выражаемому формулой:
Здесь буквой ω обозначена круговая частота, а y m – амплитуда колебаний.
Перемещения такого рода обеспечиваются шатунным механизмом, который преобразует круговые движения в возвратно-поступательные.
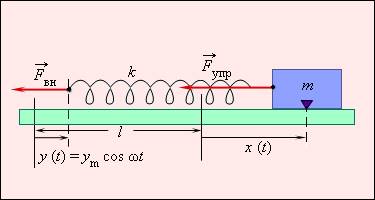
Рисунок 2 . 5 . 1 . Груз на пружине, совершающий вынужденные колебания. Перемещение свободного конца выражено формулой y = y m cos ω t , где l означает длину недеформированной пружины, а k –ее жесткость.
При смещении левого конца пружины на некоторое расстояние y и правого – на x по сравнению с первоначальным положением недеформированной пружины будет происходить ее удлинение. Найти величину этого удлинения можно по следующей формуле:
∆ l = x — y = x — y m cos ω t .
В таком случае мы можем переформулировать второй закон Ньютона для этого случая следующим образом:
m a = — k ( x — y ) = — k x + k y m cos ω t .
Здесь сила, которая действует на тело, показана как сумма двух слагаемых, первым из которых является упругость, стремящаяся к равновесию тела, а вторым – внешнее воздействие, совершающееся с определенными интервалами. Внешнюю силу также называют вынуждающей.
Теперь выразим эту зависимость в строгой математической формуле, учитывающей связь между координатой тела a = x ¨ и его ускорением. У нас получится следующее:
x ¨ + ω 0 2 x = A cos ω t .
Эта зависимость называется уравнением внешних колебаний. Здесь ω 0 = k m является собственной круговой частотой свободного колебания, а ω – циклической частотой внешней (вынуждающей) силы.
Чтобы найти величину A для вынужденного колебания груза на пружине, нужно воспользоваться следующей формулой:
A = k m y m — ω 0 2 y m .
То уравнение, что мы записали перед этим, не учитывает, что на тело действуют также и силы трения. В уравнении вынужденных колебаний, в отличие от уравнения свободных, учитываются сразу обе частоты – частота вынуждающей силы и частота свободных колебаний.
Вынужденные колебания груза на пружине, которые устанавливаются со временем, имеют частоту внешнего воздействия. Это определяется следующим законом:
x ( t ) = x m cos ( ω t + θ ) .
Здесь x m обозначает амплитуду вынужденного колебания, а буква θ – его начальную фазу. Значения обоих этих показателей будут зависеть от амплитуды внешней силы и соотношения частот.
Если частоты очень низкие, т.е. ω ≪ ω 0 , то тело, прикрепленное к правому концу пружины, движется точно так же, как и левый конец этой пружины. Тогда получается, что x ( t ) = y ( t ) . Сама пружина при этом практически не деформируется, а модуль внешней силы F → в н , приложенной к ее левому концу, стремится к нулю. Работа при этом не совершается.
Понятие резонанса
Резонанс – это резкое возрастание амплитуды вынужденных колебаний при сближении частоты внешней силы с собственной частотой колебания тела.
С помощью резонансной кривой (резонансной характеристики) можно описать зависимость, существующую между амплитудой внешних колебаний x m и частотой вынуждающей силы ω .
Когда происходит резонанс, амплитуда x m может оказаться значительно больше, чем амплитуда колебаний левого (свободного) конца пружины.. Если мы не будем учитывать силы трения, то получится, что при резонансной частоте амплитуда вынужденных колебаний будет возрастать неограниченно. В реальности она будет зависеть от следующего условия: работа внешней силы в течение всего времени колебаний должна совпадать с потерями механической энергии, происходящими из-за трения. При уменьшении трения (и, соответственно, повышении добротности Q колебательной системы) амплитуда вынужденных колебаний при резонансе возрастет.
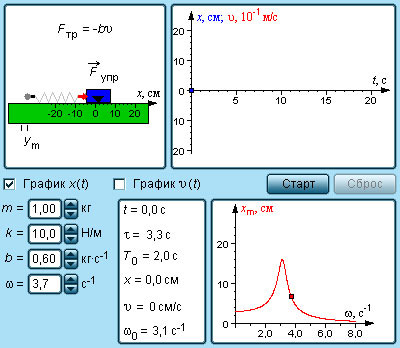
Рисунок 2 . 5 . 2 . Моделирование вынужденных колебаний.
Если добротность колебательной системы невысока (менее 10 ), то частота резонанса будет находиться ближе к низким частотам. Это показано на иллюстрации 2 . 5 . 2 .
Явление резонанса имеет большое практическое значение. Именно из-за него зачастую разрушаются здания, мосты и другие сооружения. Это происходит в тот момент, когда их собственные частоты совпадают с частотой внешней силы, например, колебаниями мотора.
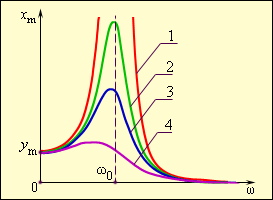
Рисунок 2 . 5 . 3 . Изображение затухания различных колебаний при помощи резонансных кривых: 1 — условная система без учета трения (бесконечное возрастание амплитуды вынужденных колебаний), 2 , 3 , 4 – резонансные колебания в реальных условиях, происходящих в системах разной степени добротности ( Q 2 > Q 3 > Q 4 ) . Если частоты низкие, то ( ω ≪ ω 0 ) x m ≈ y m , а если высокие, то ( ω ≫ ω 0 ) x m → 0 .
Вынужденные колебания являются незатухающими. При трении неизбежно теряется часть энергии, однако воздействие внешних периодически действующих сил компенсирует ее.
Что такое автоколебательные системы
Автоколебательные системы – это системы, в которых могут возникать незатухающие колебания безотносительно внешнего воздействия, а лишь за счет способности самостоятельно регулировать подвод энергии от внешнего источника. Процесс колебаний в таких системах называют автоколебаниями.
Внутри этой системы можно выделить три составляющих – саму систему, источник внешней постоянной энергии и обратную связь между ними. Первым элементом выступает любая механическая система, которая может совершать затухающие колебания, например, часовой маятник. В качестве источника можно использовать потенциальную энергию груза в поле тяжести или энергию деформации пружины. Система обратной связи – это, как правило, особый механизм, функцией которого является регулирование поступлений энергии. На иллюстрации показано, как эти компоненты взаимодействуют между собой.
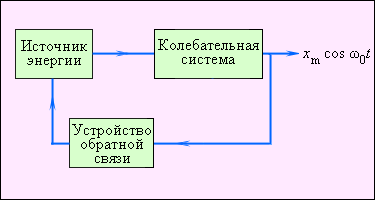
Рисунок 2 . 5 . 4 . Автоколебательная система со всеми основными составляющими.
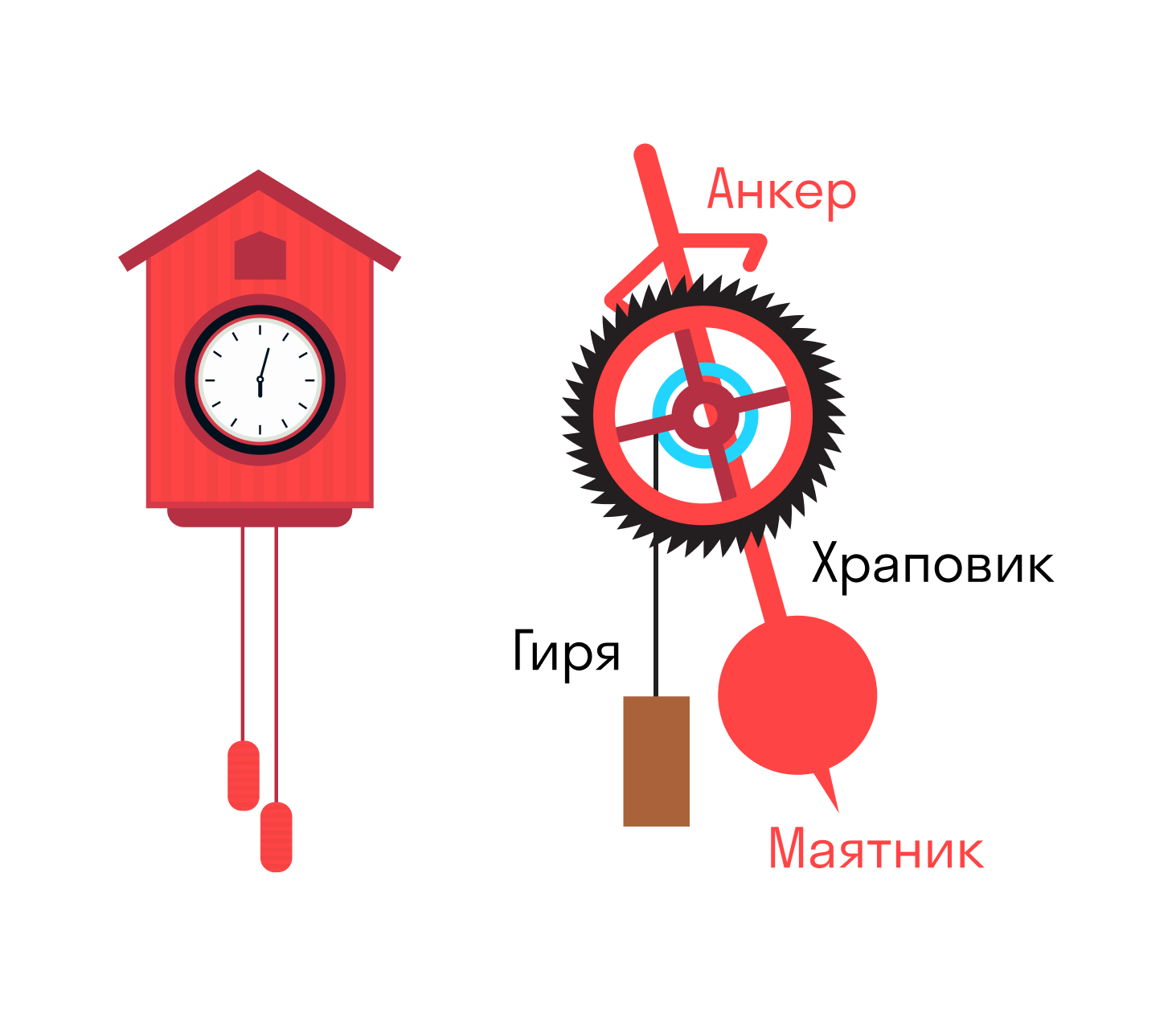
Какие можно привести примеры таких систем? Ярким примером является часовой механизм с так называемым анкерным ходом. В нем есть ходовое колесо с косыми зубчиками, прочно сцепленное с зубчатым барабаном, через который перекинута цепочка с грузом. В верхней части маятника закреплен якорек (анкер), состоящий из двух твердых пластинок, дугообразно изогнутых по окружности с центром на основной оси. В механизме ручных часов вместо гири используется пружина, а вместо маятника – маховичок-балансир, соединенный со спиральной пружиной, который совершает круговые колебания вокруг своей оси. В качестве источника внешней энергии выступает заведенная пружина или поднятая гиря. Обратная связь осуществляется с помощью анкера: он позволяет ходовому колесу совершать поворот только на один зубец за полупериод. Когда анкер взаимодействует с ходовым колесом, происходит передача энергии. Когда маятник колеблется, зубец ходового колеса передает анкерной вилке энергию по направлению движения маятника, и именно этим компенсируются силы трения. Таким образом, энергия поднятой гири или заведенной пружины поступает маленькими порциями к маятнику.
Существует также много других автоколебательных систем, которые широко применяются в технике. Автоколебания происходят внутри двигателей внутреннего сгорания, паровых машин, электрических звонков, музыкальных инструментов, голосовых связок и т.д.

Рисунок 2 . 5 . 5 . Схема маятникового часового механизма.
Вынужденные колебания
Определение вынужденных колебаний
Для того чтобы в реально существующей колебательной системе получать незатухающие колебания, следует каким-либо образом компенсировать потери энергии, которые происходят в результате существования сил сопротивления. Самым простым способом реализации незатухающих колебаний является воздействие на систему при помощи внешней периодической силы. Работа внешней силы обеспечить приток энергии в систему извне. Эта энергия не даст колебаниям затухнуть, при действии сил трения.
Колебания, которые возникают под действием периодически меняющейся силы (периодически изменяющейся ЭДС), называют вынужденными механическими (электромагнитными) колебаниями.
Дифференциальное уравнение вынужденных колебаний
Допустим, на механическую колебательную систему действует гармонически изменяющаяся внешняя сила:
Рассмотрим колебания груза на пружине (пружинный маятник). Уравнение незатухающих гармонических колебаний для этой системы можно записать как:
где $x$ — координата; $\delta $ — коэффициент затухания; $<\omega >_0$ — циклическая частота свободных незатухающих колебаний (если $\delta $=0, то $<\omega >_<0\ >$называют собственной частотой колебаний).
Если рассматривается, например, электрический колебательный контур, то роль периодически действующей силы может играть внешняя ЭДС или переменное напряжение. Их подводят к контуру извне и изменяются они по гармоническому закону. Уравнение колебаний в электрическом контуре можно представить как:
где $q$ — заряд; $\delta =\frac
Уравнения (2) и (3) можно свести к линейному неоднородному дифференциальному уравнению вида:
где $s$ — колеблющийся параметр; $x_0=\frac
Решением уравнения (4) является сумма общего решения однородного уравнения и частного решения неоднородного уравнения. Однородное уравнение при этом имеет вид:
Его общее решение:
где $A_0$ — начальная амплитуда колебаний.
Частное решение уравнения (4) в представлено выражением:
Слагаемое $s_1$ в решении уравнения (5) играет значительную роль в начальной стадии установления колебаний, пока амплитуда вынужденных колебаний не будет определяться выражением (8).
Установившись, вынужденные колебания происходят с частотой $\omega $ и являются гармоническими. Амплитуда и фаза этих колебаний определяются равенствами (8) и (9), и они зависят от частоты $\omega $.
Резонанс вынужденных колебаний
Если частота вынуждающей силы приближается к собственной частоте колебаний, то возникает резкое увеличение амплитуды колебаний. Такое явление называют резонансом.
Из выражения (8) видно, что амплитуда имеет максимум. Для нахождения резонансной частоты (частоты при которой $A=max$), следует найти максимум функции $A(\omega )$. Взяв производную $\frac
Равенство (10) справедливо при:
Получается, что резонансная частота ($<\omega >_r$) равна:
При $<\delta >^2\ll <\omega >^2_0$ резонансная частота совпадает с собственной частотой колебаний $<\omega >_0.$ Подставим вместо частоты правую часть выражения (11) в формулу (8), получим выражение для резонансной амплитуды вынужденных колебаний:
При небольшом затухании колебаний (если $<\delta >^2\ll <\omega >^2_0$) амплитуда при резонансе равна:
где $Q=\frac<<\omega >_0><2\delta >$ — добротность колебательной системы, величина, характеризующая резонансные свойства колебательной системы. С увеличением добротности увеличивается амплитуда резонанса.
Примеры задач с решением
Задание. Какова добротность колебательного контура, представленного на рис.1?
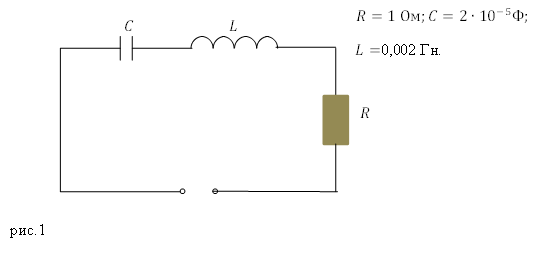
Решение. Добротность электрического колебательного контура найдем как:
При этом собственная частота колебаний в таком контуре равна:
коэффициент затухания находим как:
Подставляет правые части выражений (1.2) (1.3) вместо соответствующих величин в (1.1), в результате, добротность представленного на рис. 1 контура найдем при помощи формулы:
Ответ. $Q=10$
Задание. Пружинный маятник выполняет вынужденные колебания в вязком веществе. Масса груза на пружине равна $m$, коэффициент упругости пружины $k$. Коэффициент сопротивления среды равен $r$. Систему заставляет совершать колебания сила $F=<\cos \left(\omega t\right)(Н).\ \ \ >$Чему равна резонансная амплитуда заданных колебаний ($A_r$)?
Решение. Допустим, что груз совершает колебания вдоль прямой X, тогда уравнением данных механических колебаний будет выражение:
где коэффициент затухания равен $\delta =\frac
мы видим, что амплитуда силы равна единице:
Собственная частота колебаний груза на пружине:
Амплитуда при резонансе таких колебаний равна:
Вынужденные колебания
О чем эта статья:
11 класс, ЕГЭ/ОГЭ
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат (в правом нижнем углу экрана).
Механические колебания
Механические колебания — это физические процессы, точно или приблизительно повторяющиеся через одинаковые интервалы времени.
Колебания делятся на два вида: свободные и вынужденные.
Колебания, которые происходят под действием внутренних сил в колебательной системе, называют свободными. Они всегда затухающие, потому что весь запас энергии, сообщенный в начале, в конце уходит на совершение работы по преодолению сил трения и сопротивления среды (в этом случае механическая энергия переходит во внутреннюю). Из-за этого свободные колебания почти не имеют практического применения.
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Какие колебания называются вынужденными?
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели — если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку, такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
Например, часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.
Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
Характеристики колебаний
Любое колебательное движение характеризуется величинами: период, частота, амплитуда, фаза колебаний.
Формула периода колебаний
T = t/N
N — количество колебаний [-]
Кстати, для математического и пружинного маятника есть свои формулы периода:
Формула периода колебания математического маятника

l — длина нити [м]
g — ускорение свободного падения [м/с^2]
На планете Земля g = 9,8 м/с2
Формула периода колебания пружинного маятника
m — масса маятника [кг]
k — жесткость пружины [Н/м]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
N — количество колебаний [-]
- Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо xmax.
Она используется в уравнении гармонических колебаний:

- Фаза колебаний — это физическая величина, которая показывает отклонение точки от положения равновесия. Посмотрите на рисунок, на нем изображены одинаковые фазы:
Например, в тех же самых часах с кукушкой маятник совершает колебания. Он качается слева направо и приходит в самую правую точку. В той же фазе он будет находиться, когда придет в ту же точку, идя справа налево. Если мы возьмем точку на сантиметр левее самой правой, то идя в нее не слева направо, а справа налево, мы получим уже другую фазу.
Курсы по физике за 9 класс в онлайн-школе Skysmart помогут разобраться в любой сложной теме.
http://www.webmath.ru/poleznoe/fizika/fizika_42_vynuzhdennye_kolebanija.php
http://skysmart.ru/articles/physics/vynuzhdennye-kolebaniya