Уравнение движения под действием упругой силы
§2 Пружинный маятник.
Упругие и квазиупругие силы .
Уравнение колеблющейся пружины
 Рассмотрим тело массы m , закрепленное на пружине с коэффициентом жесткости k (массой пружины пренебрегаем). Растянем пружину на х. Тогда по закону Гука на тело будет действовать сила упругости F упр :
Рассмотрим тело массы m , закрепленное на пружине с коэффициентом жесткости k (массой пружины пренебрегаем). Растянем пружину на х. Тогда по закону Гука на тело будет действовать сила упругости F упр :
1) величина силы пропорциональна величине отклонения системы от положения равновесия

2) направление сила противоположно направлении смещения, т.е. сила всегда направлена к положению равновесия (при х > 0, F упр F упр > 0)
3) В положении равновесия х = 0 и F упр = 0.
Систему, состоящую из материальной точки массы m и абсолютно упругой пружины с коэффициентом жесткости k , в которой возможны свободные колебания, называют пружинным маятником.
Запишем второй закон Ньютона для рис. б








Если сила не является по своей природе упругой, но подчиняется закону F = — k х , то она называется квазиупругой силой.
Получим уравнение пружинного маятника. Учтем в записи второго закона Ньютона, что





— дифференциальное уравнение точки, совершающей колебательное движение (дифференциальное уравнение пружинного маятника).
Решение дифференциального уравнения:

— уравнение колеблющейся точки (уравнение колеблющейся пружины).

— собственная частота колебаний.
§3 Математический и физический маятники.
Периоды колебаний математического и физического маятников
Математический маятник — материальная точка, подвешенная на невесомой нерастяжимой нити, и совершавшая колебания в вертикальной плоскости под действием силы тяжести. Материальная точка — тело, масса которого сосредоточена в центре масс и размерами которого в условиях данной задачи, можно пренебречь.
 Математический маятник при колебаниях совершает движение по дуге окружности радиуса
Математический маятник при колебаниях совершает движение по дуге окружности радиуса  . Его движение подчиняется законам вращательного движения.
. Его движение подчиняется законам вращательного движения.
Основное уравнение вращательного цветения запишется в виде
 (1)
(1)
М – момент сил, I – момент инерции, ε – угловое ускорение.



Равнодействующая сил  и
и  равна
равна  .
.
Из треугольника АВС


таким образом, колебания математического маятника происходят под действием квазиупругой силы — силы тяжести.
Тогда (1) запишется в виде
 (2)
(2)
Знак минус учитывает, что векторы  и
и  имеют противоположные направления (угол поворота можно рассматривать, как псевдовектор углового смещения
имеют противоположные направления (угол поворота можно рассматривать, как псевдовектор углового смещения  , направление вектора
, направление вектора  определяется по правилу правого винта, из-за знака минус
определяется по правилу правого винта, из-за знака минус  направлен в противоположную сторону).
направлен в противоположную сторону).
Сократив в (2) на m и  получим
получим

При малых углах колебаний α = 5 ÷6° ,  , получим
, получим


получим дифференциальное уравнение колебаний математического маятника


— уравнение математического маятника.
из которого видно, что угол α изменяется по закону косинуса. α0 — амплитуда, ω0 — циклическая частота, φ0 — начальная фаза.

— период колебаний математического маятника
Физический маятник — твердое тело, колеблющееся под действием силы тяжести вокруг неподвижной горизонтальной оси, не проходящей через центр тяжести тела, называемой осью качания маятника.
 Основное уравнение – вращательного движения для физического маятника запишется в виде
Основное уравнение – вращательного движения для физического маятника запишется в виде

При малых углах колебаний  и уравнение движения имеет вид
и уравнение движения имеет вид



— дифференциальное уравнение физического маятника.

— период колебаний физического маятника

следовательно, математический маятник с длиной
Механические колебания
теория по физике 🧲 колебания и волны
Колебательное движение очень распространено. Заставить колебаться можно любое тело, если приложить к нему силу — однократно или постоянно. К примеру, если подтолкнуть качели, они начнут качаться вперед-назад, и такое движение будет приблизительно повторяться до тех пор, пока качели полностью не остановятся.
Другой пример колебательного движения — тело, подвешенное к пружине. Если его потянуть вниз и отпустить, то за счет сил упругости оно сначала поднимется вверх, а затем снова опустится вниз, затем движения вверх-вниз будут повторяться. Со временем они прекратятся под действием силы сопротивления воздуха.
Колебаниями можно назвать даже движение гири, которую поднимается тяжелоатлет вверх, а затем опускает в низ. При этом он будет прикладывать к гире силу постоянно. Гиря будет колебаться до тех пор, пока к нему будет прикладываться эта сила.
Колебания — это движения, которые точно или приблизительно повторяются через определенные интервалы времени.
Механические колебания — это колебательные движения, совершаемые физическим телом в механической системе.
Механическая система — совокупность материальных точек (тел), движения которых взаимосвязаны между собой.
Какими бывают колебания?
Напомним, что в механической системе выделяют два вида сил:
- Внутренние силы — это силы, которые возникают между телами внутри системы. Примером внутренних сил служат силы тяготения между телами солнечной системы.
- Внешние силы — силы, которые действуют на тела системы со стороны тел, которые в эту систему не входят. Примером внешней силы может стать сила ветра, под действием которой шарик, подвешенный к опоре за нить, отклоняется в сторону порыва ветра.
Свободные колебания
Свободные колебания — колебания, происходящие в системе под действием внутренних сил после того, как эта система выведена из положения равновесия.
Колебательная система — механическая система, в которой возможно совершение свободных колебаний.
Свободные колебания в колебательной системе могут возникнуть только при наличии двух условий:
- После выведения из равновесия в колебательной системе появляются силы, направленные в сторону положения равновесия. Эти силы стремятся возвратить систему в положение равновесия.
- Трение между телами колебательной системы относительно мало. В противном случае колебания либо сразу затухнут, либо не начнутся совсем.
Примеры свободных колебаний:
- колебания шарика на дне сферической чаши;
- движение качелей после однократного толчка;
- колебания груза на пружине после ее растяжения;
- колебания струны после ее отклонения.

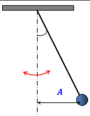
Примером колебательной системы также служит математический маятник — материальная точка, подвешенная на невесомой нерастяжимой нити. В действительности такого маятника не существует. Это идеализированная модель реального маятника, примером которого служит тяжелый шарик, подвешенный на длинной нити. В этом случае размером шарика и растяжением нити можно пренебречь.
В колебательную систему математического маятника входят:
- нить;
- тело, привязанное к нити;
- Земля, в поле тяжести которой находится привязанное к нити тело.
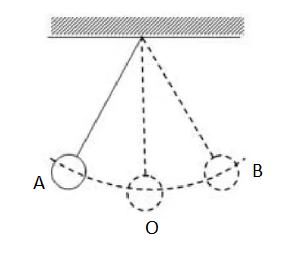
В положении равновесия (точка О) шарик висит на нити и покоится. Если его отклонить от положения равновесия до точки А и отпустить, под действием силы тяжести шарик приблизится к положению равновесия. Так как к этому моменту шарик обретет скорость, он не сможет остановиться и приблизится к точке В. Затем он снова вернется в точку А через положение равновесия в точке О. Шарик будет колебаться, пока не затухнут под действием возникающей силы сопротивления воздуха.
Вынужденные колебания
Вынужденные колебания — колебания тел под действием внешних периодически изменяющихся сил.
Примерами вынужденных колебаний служат:
- движение поршня в цилиндре;
- раскачивание ветки дерева на ветру;
- движение иглы швейной машинки;
- движение качелей под действием постоянных толчков.
Затухающие и незатухающие колебания
Затухающие колебания — колебания, которые со временем затухают. При этом максимальное отклонение тела от положения равновесия с течением времени уменьшается.
Колебания затухают под действием сил, препятствующих колебательному движению. Так, шарик в сферической чаше перестает колебаться под действием силы трения. Математический маятник и качели перестают совершать колебательные движения за счет силы сопротивления воздуха.
Все свободные колебания являются затухающими, так как всегда присутствует трение или сопротивление среды.
Незатухающими колебаниями могут быть только те, которые совершаются под действием периодической внешней силы (вынужденные колебания). Так, ветка будет раскачиваться до тех пор, пока дует ветер. Когда он перестанет дуть, колебания ветки со временем затухнут. Иголка швейной машинки будет совершать колебательные движения до тех пор, пока швея вращает ручку привода. Когда она перестанет это делать, иголка сразу остановится.
Динамика колебательного движения
Для того чтобы описать количественно колебания тела пол действием силы упругости пружины или колебания шарика, подвешенного на нити, воспользуемся законами механики Ньютона.
Уравнение движения тела, колеблющегося под действием сил упругости
Рассмотрим колебательное движение шарика, вызванное силой упругости, возникшей при растяжении горизонтальной пружины вдоль оси Ох.
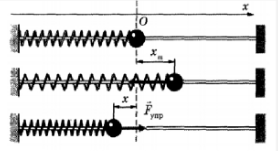
Согласно II закону Ньютона произведение массы тела на ускорение равно равнодействующей всех сил приложенных к телу. Поскольку сила трения пренебрежимо мала, мы можем считать, что в этой механической системе действует единственная сила — сила упругости. Учтем, что шарик колеблется вдоль одной прямой, и выберем одномерную систему координат Ох. Тогда:
m a x = F x у п р
Согласно закону Гука, проекция сила упругости прямо пропорциональная смещению шарика из положения равновесия (точки О). Смещение равно координате x шарика, причем проекция силы и координаты имеют разные знаки. Это связано с тем, что сила упругости всегда направлена к точке равновесия, в то время как расстояние от этой точки во время движения увеличивается в обратную сторону. Отсюда делаем вывод, что сила упругости равна:
F x у п р = − k x
где k — жесткость пружины.
Тогда уравнение движения шарики принимает
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
Так как масса шарики и жесткость пружины для данной колебательной системы постоянны, отношение k m . . — постоянная величина. Отсюда делаем вывод, что проекция a x ускорения тела прямо пропорциональна его координате x, взятой с противоположным знаком.
Пример №1. Груз массой 0,1 кг прикрепили к пружине школьного динамометра жесткостью 40 Н/м. В начальный момент времени пружина не деформирована. После того, как груз отпускают, возникают колебания. Чему равна максимальная скорость груза?
Максимальной скорости груз достигнет при максимальном его отклонении от положения равновесия — в нижней точке траектории. Учтем, что тело движется вниз под действием силы тяжести. Но в то же время на него действует сила упругости, которая возникает в пружине и нарастает до тех пор, пока не становится равной по модулю силе тяжести. Применив III закон Ньютона получим:
∣ ∣ ∣ → F т я ж ∣ ∣ ∣ = ∣ ∣ ∣ → F у п р ∣ ∣ ∣
где y m a x — максимальное отклонение груза от положения равновесия. В этой точке скорость тела будет максимальная. Для нахождения этой величины используем формулу из кинематики:
y m a x = v 2 m a x − v 2 0 2 g . .
Начальная скорость равна нулю. Отсюда:
y m a x = v 2 m a x 2 g . .
m g = k v 2 m a x 2 g . .
Максимальная скорость равна:
v m a x = g √ 2 m k . . = 10 √ 2 · 0 , 1 40 . . ≈ 0 , 71 ( м с . . )
Уравнение движения математического маятника
Ниже на рисунке представлен математический маятник. Если мы выведем из положения равновесия шарик и отпустим, возникнет две силы:
- сила тяжести, направленная вниз;
- сила упругости, направленная вдоль нити.
При колебаниях шарика также будет возникать сила сопротивления воздуха. Но так как она очень мала, мы будем ею пренебрегать.
Чтобы описать динамику движения математического маятника, удобно силу тяжести разложить на две составляющие:
→ F т = → F τ + → F n
Причем компонента → F τ направлена перпендикулярно нити, а → F n — вдоль нее.
Компонента → F τ представляет собой проекцию силы тяжести в момент, когда нить маятника отклонена от положения равновесия (точки О) на угол α. Следовательно, она равна:
→ F τ = − → F т sin . α = − m g sin . α
Знак «–» мы здесь поставили по той причине, что компоненты силы тяжести → F τ и α имеют противоположные знаки. Ведь если отклонить шарик на угол α>0, то составляющая → F τ будет направлена в противоположную сторону, так как она будет пытаться вернуть шарик в положение равновесия. И ее проекция будет отрицательной. Если же шарик отклонить на угол α → F τ будет направлена в обратную сторону. В этом случае ее проекция будет положительной.
Обозначим проекцию ускорения маятника на касательную к его траектории через a τ . Эта проекция характеризует быстроту изменения модуля скорости маятника. Согласно II закону Ньютона:
m a τ = − m g sin . α
Разделим обе части выражения на массу шарика m и получим:
При малом отклонении нити маятника от вертикали можно считать, что sin . α ≈ α (при условии, что угол измерен в радианах). Тогда:
Внимание! Чтобы перевести градусы в радианы, нужно умножить градусы на число π и поделить результат на 180. К примеру 2 о = 2∙3,14/180 рад., или 2 о = 0,035 рад.
При малом отклонении также дугу ОА мы можем принять за длину отрезка OA, который мы примем за s. Тогда угол α будет равен отношению противолежащего катета (отрезка s) к гипотенузе (длине нити l):
Так как ускорение свободного падения и длина нити для данной колебательной системы постоянны, то отношение g l . . — тоже постоянная величина.
Это уравнение похоже на то уравнение, которое мы получили для описания колебательного движения шарика под действием силы упругости. И оно также позволяет сделать вывод, что ускорение прямо пропорционально координате.
Пример №2. Определить длину нити, если шарик, подвешенный к ней, отклонится на 1 см. При этом нить образовала с вертикалью угол, равный 1,5 о .
При отклонениях на малый угол мы можем пользоваться следующей формулой:
Чтобы найти длину нити, нужно выразить угол α в радианах:
1 , 5 ° = 3 , 14 · 1 , 5 180 . . ≈ 0 , 026 ( р а д )
Тогда длина нити равна:
l = s α . . = 0 , 01 0 , 026 . . ≈ 0 , 385 ( м ) = 38 , 5 ( с м )
Основные характеристики колебательного движения
Амплитуда — максимальное отклонение тела от положения равновесия. Обозначается буквой A, иногда — xmax. Единиц измерения — метр (м).
Период — время совершения одного полного колебания. Обозначается буквой T. Единица измерения — секунда (с).
Частота — количество колебаний, совершенных в единицу времени. Обозначается как ν («ню»). Единица измерения — 1/секунда, или секунда –1 , или герц (1/с, или с –1 , или Гц).
Период и частота колебаний связаны между собой следующей формулой:
Период колебаний также можно вычислить, зная количество совершенных колебаний N за время t:
Поскольку частота — это величина, обратная периоду колебаний, ее можно выразить в виде:
Пример №3. Определить частоту колебаний груза, если суммарный путь, который он прошел за 2 секунды под действием силы упругости, составил 1 м. Амплитуда колебаний равна 10 см.
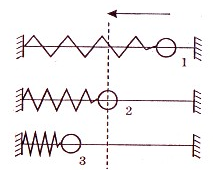
Во время одного колебания груз проходит расстояние, равное 4 амплитудам. Посмотрите на рисунок. Положение равновесия соответствует состояние 2. Чтобы совершить одно полное колебание, сначала груз отводят в положение 1. Когда его отпускают, он проходит путь 1–2 и достигает положения равновесия. Этот путь равен амплитуде колебаний. Затем он продолжает движение до состояния 3. И в это время он проходит расстояние 2–3, равное еще одной амплитуде колебаний. Чтобы вернуться в исходное положение (состояние 1), нужно снова проделать путь в обратном направлении: сначала 3–2, затем 2–1.
Следовательно, количество колебаний равно отношению пройденного пути к амплитуде, помноженной на 4:
Так как мы знаем, что эти колебания совершались в течение 2 секунд, для вычисления частоты мы можем использовать формулу:
ν = N t . . = s 4 A t . . = 1 4 · 0 , 1 · 2 . . = 1 , 25 ( Г ц )
В таблице представлены данные о положении шарика, колеблющегося вдоль оси Ох, в различные моменты времени.

Каков период колебаний шарика?
Алгоритм решения
Решение
Из таблицы видно, что амплитуда колебаний равна 15 мм. Следовательно, максимальное отклонение в противоположную сторону составляет –15 мм. Расстояние между двумя максимальными отклонениями от положения равновесия шарика равно половине периода колебаний. Этим значения в таблице соответствует время 1 и 3 секунды соответственно. Следовательно, разница между ними — половина периода. Тогда период будет равен удвоенной разнице во времени:
T = 2 ( t 2 − t 1 ) = 2 ( 3 − 1 ) = 4 ( с )
pазбирался: Алиса Никитина | обсудить разбор | оценить
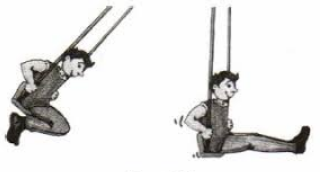
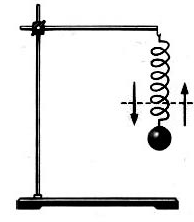
Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
| 1) | увеличивается |
| 2) | уменьшается |
| 3) | не изменяется |
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.

Алгоритм решения
Решение
Потенциальная энергия пружины определяется формулой:
где k — коэффициент жесткости пружины, а x — ее удлинение. Величина x была максимальной в нижней точке траектории. Когда пружина начинает сжиматься, она уменьшается. Так как потенциальная энергия зависит от квадрата x прямо пропорционально, то при уменьшении этой величины потенциальная энергия пружины тоже уменьшается.
Кинетическая энергия тела определяется формулой:
В нижней точке траектории скорость шарика была равна нулю. Но к этому времени потенциальная энергия пружины достигла максимума. Она начинает с ускорением поднимать шарик вверх, сжимаясь. Следовательно, скорость растет. Так как кинетическая энергия зависит от квадрата скорости тела прямо пропорционально, то при увеличении скорости этой величины кинетическая энергия шарика тоже увеличивается.
Потенциальная энергия тел в поле тяжести земли определяется формулой:
Масса и ускорение свободного падения шарика — постоянные величины. Следовательно, потенциальная энергия зависит только от расстояния до поверхности земли. Когда пружина поднимает шарик, расстояние между ним и землей увеличивается. Так как потенциальная энергия зависит от расстояния прямо пропорционально, то при его увеличении потенциальная энергия шарика тоже растет.
pазбирался: Алиса Никитина | обсудить разбор | оценить
В таблице представлены данные о положении шарика, прикреплённого к пружине и колеблющегося вдоль горизонтальной оси Ох, в различные моменты времени.

Из приведённого ниже списка выберите два правильных утверждения и укажите их номера.
А) Потенциальная энергия пружины в момент времени 1,0 с максимальна.
Б) Период колебаний шарика равен 4,0 с.
В) Кинетическая энергия шарика в момент времени 2,0 с минимальна.
Г) Амплитуда колебаний шарика равна 30 мм.
Д) Полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна.
Алгоритм решения
- Проверить истинность каждого утверждения.
- Выбрать 2 верных утверждения.
Решение
Согласно утверждению «А», потенциальная энергия пружины в момент времени 1,0 с максимальна. Потенциальная энергия пружины максимальна, когда она отклоняется от положения равновесия на максимальную возможную величину. Из таблицы видно, что в данный момент времени ее отклонение составило 15 мм, что соответствует амплитуде колебаний (наибольшему отклонению от положения равновесия). Следовательно, утверждение «А» — верно.
Согласно утверждению «Б», период колебаний шарика равен 4,0 с. Один период колебаний включает в себя 4 фазы. В течение каждой фазы шарик на пружине проделывает путь, равный амплитуде. Следовательно, мы можем найти период колебаний, умножив время одной фазы на 4. В момент времени t = 0 с, шарик находился в положении равновесия. Первый раз он отклонился на максимальную величину (15 мм) в момент времени t = 1,0 с. Значит, период колебаний равен 1∙4 = 4 с. Следовательно, утверждение «Б» — верно.
Согласно утверждению «В», кинетическая энергия шарика в момент времени 2,0 с минимальна. В этот момент времени, согласно данным таблицы, шарик проходит положение равновесия. В этом положении скорость шарика всегда максимальна. Поэтому кинетическая энергия, которая зависит от квадрата скорости прямо пропорционально, минимальной быть не может. Следовательно, утверждение «В» — неверно.
Согласно утверждению «Г», амплитуда колебаний шарика равна 30 мм. Амплитуда колебаний — есть расстояние от положения равновесия до точки максимального отклонения шарика. В данном случае оно равно 15 мм. Следовательно, утверждение «Г» — неверно.
Согласно утверждению «Д», полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна. Полная механическая энергия колебательной системы — это совокупность кинетической и потенциальной энергий. И при отсутствии сил трения она остается величиной постоянной. Она лишь превращается из одного вида энергии в другую. Следовательно, утверждение «Д» — неверно.
pазбирался: Алиса Никитина | обсудить разбор | оценить
Упругие и квазиупругие силы
Выясним какими силами вызываются гармонические колебания, воспользовавшись законами динамики.
По второму закону динамики сила F, действующая на материальную точку численно равна произведению массы точки m на ее ускорение w. Подставляя в это соотношение найденное ранее выражение w для гармонического колебания, определим значение силы  действующей на точку в каждый момент времени. Сравнивая это уравнение с
действующей на точку в каждый момент времени. Сравнивая это уравнение с  замечаем, что
замечаем, что  , где
, где  , т.е. сила, вызывающая гармонические колебания, обладает двумя важными свойствами:
, т.е. сила, вызывающая гармонические колебания, обладает двумя важными свойствами:
- величина силы прямо пропорциональна смещению точки от центра колебаний;
- направление силы противоположно направлению смещений, т.е. сила всегда направлена к центру (при x>0 F 0 F
При смещении материальной точки вниз от 0 на величину x на нее будет действовать сила Fупр=-kx>0 направленная вверх, т.к. x 2 =k 
Эта частота колебаний называется частотой собственных колебаний системы и обозначается w0, это частота колебаний системы за счет внутренних сил.
 тогда период
тогда период 
Частота и период не зависят от амплитуды колебаний и определяются только величинами m и k. Амплитуда и фаза колебаний (или начальная фаза j0) определяются из начальных условий, при которых возникло движение.
Аналогичное гармоническое движение возникает и при движении груза m, подвешенного на пружине с учетом действия ускорения свободного падения. Отличие от рассмотренного выше случая состоит в том, что положение равновесия будет иметь место при несколько растянутой пружине. Упругая сила растяжения в положении равновесия в точности ровна силе тяжести и будет направлена вверх. Уравновешивает ее: 
Чтобы материальная точка m совершала гармонические колебания не обязательно, чтобы на нее действовали именно упругие силы. Достаточно, чтобы сила при смещении от положения равновесия менялось согласно закону F=-kx.
Если сила, не являющаяся по своей природе упругой, подчиняется закону F=-mw 2 x=-kx, то она называется «квазиупругой» силой (по латыни «quasi» означает «как-бы»).
Рассмотрим пример гармонического колебательного движения под действием квазиупругих сил.
Математический маятник
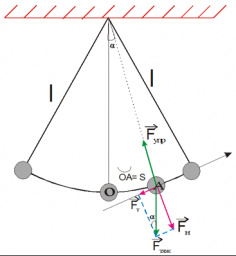
Маятник настенных часов представляет собой настенный груз, который укреплен на длинном тонком стержне, подвешенном шарнирно на горизонтальной оси C перпендикулярно стержню. В первом приближении пренебрежем массой стержня и будем считать всю массу груза m сосредоточенной в его центре М. Подобная система, состоящая из материальной точки m, подвешенная на невесомом твердом стержне или нерастяжимой нити длинны СМ=L, называется математическим маятником.
Отклоним стержень на некоторый угол a от вертикали и разложим мысленно силу веса P=mg, действующую на точку М на 2 составляющие F¢ и F, направленные соответственно вдоль стержня и перпендикулярно к нему. Сила F¢=Pcosa будет растягивать стержень и уравновесится реакцией стержня S. Неуравновешенной останется составляющая силы F=Psina. Таким образом на точку М будет действовать 2 силы P и S, направленные под углом p-a друг к другу. Равнодействующая этих сил по правилу параллелограмма будет сила F=Psina, направленная по касательной к дуге ОМ в сторону точки 0.
Когда груз придет в наинизшее положение, т.е. в точку 0, силы P и S полностью уравновесится. Таким образом точка 0 есть положение равновесия груза m. Обозначим отрезок дуги ОМ, характеризующий путь, пройденный точкой М из положения равновесия, через x и будем считать угол a и величину x положительными при отклонении стержня с грузом вправо от вертикали и отрицательными – при отклонении влево. Угол a измеряемый в радианах численно равен отношению длинны дуги x, на которую он опирается к радиусу окружности l, тогда (с учетом направления) сила F, действующая на точку М, может быть выражена в виде

Для малых углов отклонения от вертикали не превышающих 5-6°, т.е. при a
http://spadilo.ru/mexanicheskie-kolebaniya/
http://www.megapredmet.ru/1-48720.html