Координатный способ задания движения точки
Введение
Выводы приведенных ниже формул и изложение теории приводится на странице “Кинематика материальной точки”. Здесь мы применим основные результаты этой теории к координатному способу задания движения материальной точки.
Пусть мы имеем неподвижную прямоугольную систему координат с центром в неподвижной точке . При этом положение точки M однозначно определяются ее координатами (x, y, z). Координатный способ задания движения точки – это такой способ, при котором заданы зависимости координат от времени. То есть заданы три функции от времени (при трехмерном движении):
Далее мы приводим формулы вычисления кинематических величин и пример решения задачи для координатного способа задания движения.
Определение кинематических величин
Зная зависимости координат от времени , мы автоматически определяем радиус-вектор материальной точки M по формуле:
,
где – единичные векторы (орты) в направлении осей x, y, z .
Дифференцируя по времени , находим проекции скорости и ускорения на оси координат:
;
;
Модули скорости и ускорения:
;
.
Единичный вектор в направлении касательной к траектории:
.
Его можно определить двумя способами – по направлению скорости, или в противоположную сторону. Поэтому здесь в знаменателе стоит не модуль скорости, а алгебраическая величина скорости, которая, по абсолютной величине, равна модулю скорости, но может принимать как положительные, так и отрицательные значения: . Она является проекцией скорости на направление единичного вектора .
Алгебраическая величина тангенциального (касательного) ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории:
.
Вектор тангенциального (касательного) ускорения:
.
Здесь также, как и для скорости, – это скалярная величина, которая может принимать как положительные так и отрицательные значения: .
Нормальное ускорение:
.
Вектор нормального ускорения:
; .
Единичный вектор в направлении главной нормали траектории (то есть единичный вектор, перпендикулярный касательной и направленный к центру кривизны траектории):
.
Здесь – это модуль нормального ускорения: . Нормальное ускорение всегда направлено к центру кривизны траектории. Оно не может быть направлено в противоположную сторону.
Радиус кривизны траектории:
.
Центр кривизны траектории:
.
Единичный вектор в направлении бинормали:
.
Пример решения задачи
Определение скорости и ускорения точки по заданным уравнениям ее движения
По заданным уравнениям движения точки установить вид ее траектории и для момента времени найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Уравнения движения точки:
, см;
, см.
Решение
Определение вида траектории
Исключаем время из уравнений движения. Для этого перепишем их в виде:
; .
Применим формулу:
.
;
;
;
.
Итак, мы получили уравнение траектории:
.
Это уравнение параболы с вершиной в точке и осью симметрии .
Поскольку
, то
; или
.
Аналогичным образом получаем ограничение для координаты :
;
;
Таким образом, траекторией движения точки является дуга параболы
,
расположенная при
и .
Строим параболу по точкам.
| 0 | 6 |
| ± 3 | 5,625 |
| ± 6 | 4,5 |
| ± 9 | 2,625 |
| ± 12 | 0 |
Определяем положение точки в момент времени .
;
.
Определение скорости точки
Дифференцируя координаты и по времени , находим компоненты скорости.
.
Чтобы продифференцировать , удобно применить формулу тригонометрии:
. Тогда
;
.
Вычисляем значения компонент скорости в момент времени :
;
.
Модуль скорости:
.
Определение ускорения точки
Дифференцируя компоненты скорости и по времени , находим компоненты ускорения точки.
;
.
Вычисляем значения компонент ускорения в момент времени :
;
.
Модуль ускорения:
.
Алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории. Выберем направление совпадающим с направлением скорости . Тогда ; алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление скорости :
.
Поскольку , то вектор тангенциального ускорения направлен противоположно скорости .
Нормальное ускорение:
.
Вектор и направлен в сторону центра кривизны траектории.
Радиус кривизны траектории:
.
Траекторией движения точки является дуга параболы
; .
Скорость точки: .
Ускорение точки: ; ; .
Радиус кривизны траектории: .
Определение остальных величин
При решении задачи мы нашли:
вектор и модуль скорости:
; ;
вектор и модуль полного ускорения:
; ;
тангенциальное и нормальное ускорения:
; ;
радиус кривизны траектории: .
Определим остальные величины.
Единичный вектор в направлении касательной к траектории:
.
Вектор тангенциального ускорения:
.
Вектор нормального ускорения:
.
Единичный вектор в направлении главной нормали:
.
Координаты центра кривизны траектории:
.
Введем третью ось системы координат перпендикулярно осям и . В трехмерной системе
; .
Единичный вектор в направлении бинормали:
.
Автор: Олег Одинцов . Опубликовано: 22-02-2016 Изменено: 29-01-2020
Движение материальной точки по плоской кривой
До сих пор мы молчаливо предполагали, что во время движения орты постоянны и дифференцировать их по времени нет необходимости. Это предположение справедливо не всегда. Например. Оно не справедливо, если происходит криволинейное движение. Простейший случай такого движения – движение по окружности или, в более общем случае – по плоской кривой. Кривая называется плоской, если все её точки лежат в одной плоскости (см. рис. 1). Как легко заметить, орты координат при этом изменяют своё направление, то есть зависят от времени.
В случае вращения по окружности с постоянной по модулю скоростью известно, что на материальную точку действует центростремительная сила
 ,
,
где  – масса материальной точки,
– масса материальной точки,  – модуль её скорости,
– модуль её скорости,  – радиус окружности,
– радиус окружности,  – радиус-вектор, проведенный из центра окружности в ту точку, где в данный момент находится материальная точка. Знак минус указывает, что действующая на материальную точку сила направлена к центру окружности.
– радиус-вектор, проведенный из центра окружности в ту точку, где в данный момент находится материальная точка. Знак минус указывает, что действующая на материальную точку сила направлена к центру окружности.
При движении по плоской кривой формулу для центростремительной силы можно обобщить. Для этого надо сделать несколько шагов.

Выделим на плоской кривой L произвольные точки A и B. Построим окружности, касающиеся этих точек; стрелки указывают радиусы  и
и  , проведенные из центров окружностей в точки касания. Соответствующие радиусы (не векторы) называются радиусами кривизны в точках
, проведенные из центров окружностей в точки касания. Соответствующие радиусы (не векторы) называются радиусами кривизны в точках  и
и  . Обратная величина, например,
. Обратная величина, например,  , называется кривизной кривой L в точке . Кривая должно быть плавной. В точке излома (в физике таких кривых не бывает) кривизна не определена. Для прямой линии кривизна стремится к нулю (радиус кривизны бесконечен). В точке кривизна считается положительной, в точке – отрицательной.
, называется кривизной кривой L в точке . Кривая должно быть плавной. В точке излома (в физике таких кривых не бывает) кривизна не определена. Для прямой линии кривизна стремится к нулю (радиус кривизны бесконечен). В точке кривизна считается положительной, в точке – отрицательной.
Если точка движется со скоростями  и
и  , то на неё действуют центростремительные силы
, то на неё действуют центростремительные силы  , определяемые указанной формулой. Это, в частности, означает, что они движутся с центростремительным ускорением
, определяемые указанной формулой. Это, в частности, означает, что они движутся с центростремительным ускорением
 или
или  .
.
Но это не полное ускорение материальной точки. Для того, чтобы найти полное ускорение учтем, что при движении по плоской кривой скорость имеет вид
 ,
,
где  – вектор, касательный к рассматриваемой точке (например, к точке В , см. рис. 1), причем он зависит от времени,
– вектор, касательный к рассматриваемой точке (например, к точке В , см. рис. 1), причем он зависит от времени,  – модуль скорости в этой точке.
– модуль скорости в этой точке.
Чтобы найти ускорение надо продифференцировать скорость:
 .
.
Первое слагаемое называется тангенциальным (касательным) ускорением,
 ,
,
и учитывает поворот касательного орта (для движения по прямой тангенциальное ускорение равно нулю), второе слагаемое – центростремительное ускорение,
 ,
,
и учитывает изменение модуля скорости.
Таким образом, полное ускорение равно
 ,
,
а так как радиус, проведенный в точку касания перпендикулярен касательной, модуль полного ускорения равен
 .
.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студентов недели бывают четные, нечетные и зачетные. 9468 –  | 7450 –
| 7450 –  или читать все.
или читать все.
78.85.5.224 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Рассмотрим движение материальной точки по произвольной кривой. Для простоты, будем считать эту кривую плоской, все точки такой кривой лежат в одной плоскости.
Предположим, что в момент времени t материальная точка оказалась в точке M кривой (рис. 2.7.1). Возьмем два положения материальной точки – в момент времени t-Dt (точка M1) и момент времени t+Dt (точка M2). Через три точки M1, M и M2 можно провести единственную окружность. На рис. 2.7.1 это окружность C1. Уменьшим приращение времени Dt и через новые точки проведем окружность C2. Дальнейшее уменьшение Dt приведет к последовательности окружностей  . В курсе математического анализа доказывается, что у этой последовательности существует предел (окружность C на рис. 2.7.1).
. В курсе математического анализа доказывается, что у этой последовательности существует предел (окружность C на рис. 2.7.1).
Соприкасающейся окружностью в точке M плоской кривой называется предел последовательности окружностей, проходящих через три точки рассматриваемой кривой, одна из которых точка M, при неограниченном приближении двух других точек к точке M.
Центр соприкасающейся окружности и ее радиус называются соответственно центром кривизны и радиусом кривизны рассматриваемой кривой в точке M.
Пользуясь результатами предыдущего параграфа, можно найти ускорение в некоторой точке M криволинейной траектории.
a = an + at., (2.7.1)
где  – тангенциальное ускорение,
– тангенциальное ускорение,  – нормальное ускорение, RM – радиус кривизны траектории в точке M.
– нормальное ускорение, RM – радиус кривизны траектории в точке M.
Физический метод определения радиуса кривизны.
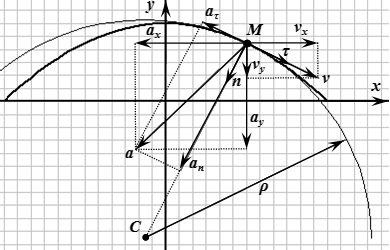
Найдем, для примера, радиус кривизны параболы в некоторой точке M. Парабола – это траектория движения тела, брошенного под углом к горизонту (см. рис. 2.7.2). Ускорение тела a = g можно представить как сумму нормального и тангенциального ускорений: g = an + at. Т.к.  , то радиус кривизны RM параболы в некоторой точке M вычисляется по формуле:
, то радиус кривизны RM параболы в некоторой точке M вычисляется по формуле:  =
=  . Проекции скорости vx(t) и vy(t) рассчитываются по формулам из §5.
. Проекции скорости vx(t) и vy(t) рассчитываются по формулам из §5.
В зависимости от формы траектории движение можно подразделять на прямолинейное и криволинейное. Чаще всего можно столкнуться с криволинейными движениями, когда траектория представлена в виде кривой. Примером такого вида движения является путь тела, брошенного под углом к горизонту, движение Земли вокруг Солнца, планет и так далее.
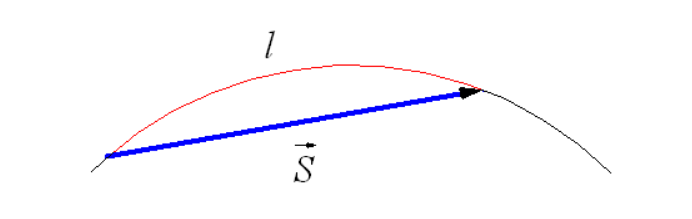
Рисунок 1 . Траектория и перемещение при криволинейном движении
Мгновенная скорость при криволинейном движении
Криволинейным движением называют движение, траектория которого представляет собой кривую линию. Если тело движется по криволинейной траектории, то вектор перемещения s → направлен по хорде, как показано на рисунке 1 , а l является длиной траектории. Направление мгновенной скорости движения тела идет по касательной в той же точке траектории, где в данный момент располагается движущийся объект, как показано на рисунке 2 .
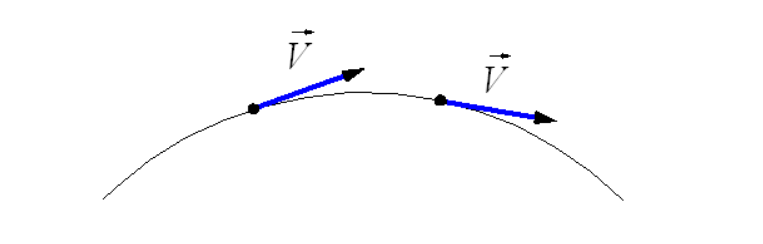
Рисунок 2 . Мгновенная скорость при криволинейном движении
Криволинейное движение материальной точки называют равномерным тогда, когда модуль скорости постоянный (движение по окружности), и равноускоренным при изменяющемся направлении и модуле скорости (движение брошенного тела).
Криволинейное движение всегда ускоренное. Это объясняется тем, что даже при неизмененном модуле скорости, а измененном направлении, всегда присутствует ускорение.
Для того чтобы исследовать криволинейное движение материальной точки, применяют два метода.
Путь разбивается на отдельные участки, на каждом из которых его можно считать прямолинейным, как показано на рисунке 3 .
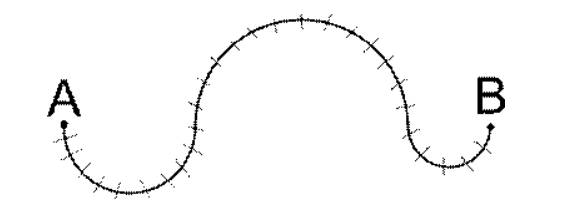
Рисунок 3 . Разбиение криволинейного движения на поступательные
Теперь для каждого участка можно применять закон прямолинейного движения. Такой принцип допускается.
Разбиение на движения по дугам
Самым удобным методом решения считается представление пути в качестве совокупности нескольких движений по дугам окружностей, как показано на рисунке 4 . Количество разбиений будет намного меньше, чем в предыдущем методе, кроме того, движение по окружности уже является криволинейным.
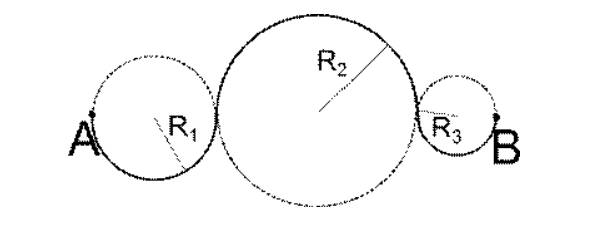
Рисунок 4 . Разбиение криволинейного движения на движения по дугам окружностей
Для записи криволинейного движения необходимо уметь описывать движение по окружности, произвольное движение представлять в виде совокупностей движений по дугам этих окружностей.
Исследование криволинейного движения включает в себя составление кинематического уравнения, которое описывает это движение и позволяет по имеющимся начальным условиям определить все характеристики движения.
Дана материальная точка, движущаяся по кривой, как показано на рисунке 4 . Центры окружностей O 1 , O 2 , O 3 располагаются на одной прямой. Необходимо найти перемещение
s → и длину пути l во время движения из точки А в В .
Решение
По условию имеем, что центры окружности принадлежат одной прямой, отсюда:
s → = R 1 + 2 R 2 + R 3 .
Так как траектория движения – это сумма полуокружностей, то:
A B = π R 1 + R 2 + R 3 .
Ответ: s → = R 1 + 2 R 2 + R 3 , l
A B = π R 1 + R 2 + R 3 .
Дана зависимость пройденного телом пути от времени, представленная уравнением s ( t ) = A + B t + C t 2 + D t 3 ( C = 0 , 1 м / с 2 , D = 0 , 003 м / с 3 ) . Вычислить, через какой промежуток времени после начала движения ускорение тела будет равно 2 м / с 2
Уравнение движения материальной точки
Движение материальной точки в пространстве – это изменение ее положения относительно других тел с течением времени.
Имеет смысл говорить только о движении в некоторой системе отсчета.
Система отсчета. Системы координат
Точки, располагаемые в пустом пространстве, не различаются. Поэтому о точке рассуждают при условии нахождения в ней материальной точки. Определить ее положение можно при помощи измерений в системе координат, где и проводится нахождение пространственных координат. Если рассматривать в виде примера поверхность Земли, то следует учитывать широту и долготу располагаемой точки.
В теории используется декартова прямоугольная система координат, где определение точки возможно при наличии радиус-вектора r и трех проекций x , y , z – ее координат. Могут быть применены другие:
- сферическая система с положением точек и ее радиус-вектором, определенных координатами r , υ , φ ;
- цилиндрическая система с координатами p , z , α ;
- на полярной плоскости с параметрами r , φ .
В теории зачастую не принимают во внимание реальную систему отсчета, а сохраняют только ту, которая представляет собой ее математическую модель, применяемую во время практических измерений.
Кинематическое уравнение движения материальной точки
Любая система отсчета или координат предполагает определение координат материальной точки в любой момент времени.
При условии положения и определения материальной точки в данной системе отсчета считается, что ее движение задано или описано.
Это возможно при использовании кинематического уравнения движения:
Аналитически положение точки определяется совокупностью трех независимых между собой чисел. Иначе говоря, свободная точка имеет три степени свободы движения.
Ее перемещение по уравнению ( 1 ) определено, если имеется указанное положение в любой момент времени t . Для этого следует задавать декартовы координаты точки в качестве однозначных и непрерывных функций времени:
x ( t ) = x , y ( t ) = y , z ( t ) = z ( 2 ) .
Прямоугольные декартовы координаты x , y , z — это проекции радиус-вектора r ¯ , проведенного из начала координат. Очевидно, что длину и направление r ¯ можно найти из соотношений, где a , β , γ являются образованными радиус-вектором углами с координатными осями.
Равенства ( 2 ) считают кинематическими уравнениями движения материальной точки в декартовых координатах.
Они могут быть записаны в другой системе координат, которая связана с декартовой взаимно однозначным преобразованием. Если движение точки происходит в плоскости О х у , тогда применимы полярные координаты r , φ , относящиеся к декартовым преобразованиям. Данный случай подразумевает использование уравнения движения точки следующего вида:
r = r ( t ) , φ = φ ( t ) ( 3 ) .
Кинематическое уравнение движения точки в криволинейных координатах q 1 , q 2 , q 3 , связанных с декартовыми преобразованиями вида x = x ( q 1 , q 2 , q 3 ) , y = y ( q 1 , q 2 , q 3 ) , z = z ( q 1 , q 2 , q 3 ) ( 4 ) , записывается как
q 1 = q 1 ( t ) , q 2 = q 2 ( t ) , q 3 = q 3 ( t ) ( 5 ) .
Кривая радиус-вектора, описываемая концом вектора r при движении точки, совпадает с ее траекторией. Параметрическое уравнение траектории с t представлено кинематическими уравнениями ( 2 ) , ( 5 ) . Чтобы получить координатное уравнение траектории следует исключить время из кинематических уравнений.
Определение движения точки возможно с помощью задания траектории и мгновенного положения точки на ней. Ее положение на кривой определяется с помощью указания только одной величины: расстояния вдоль кривой от некоторой начальной точки с положительным направлением:
Это и есть уравнение движения точки по траектории. Способ его задания относят к естественному или траекторному.
Понятия координатного и естественного способа задания движения точки физически эквивалентны. С математической стороны это рассматривают как возможность применения разных методов, исходя из случая математической задачи.
Задание такого закона возможно аналитическим, графическим путем или с использованием таблицы, последние два из которых зачастую рассматривают в виде графиков и расписаний движений поездов.
Дано уравнение движения материальной точки x = 0 , 4 t 2 . Произвести запись формулы зависимости υ x ( t ) , построить график зависимости скорости от времени. На графике отметить площадь, численно равную пути, пройденному точкой за 4 секунды, произвести вычисление.
Дано: x = 0 , 4 t 2 , t = 4 c
Найти: υ x ( t ) , S — ?
Решение
При решении необходимо учитывать зависимость скорости от времени:
υ x = υ 0 x + a x t .
Зависимость координаты от времени и сравнение уравнения с заданным принимает вид:
x = x 0 + υ 0 x t + a x t 2 2 , x = 0 , 4 t 2 .
Очевидно, что x 0 = 0 , υ 0 x = 0 , a x = 0 , 8 м / с 2 .
После подстановки данных в уравнение:
Определим точки, изобразим график:
υ x = 0 , t = 0 , υ x = 4 , t = 5

Путь, по которому двигалось тело, равняется площади фигуры, ограниченной графиком, и находится с помощью формулы:
http://games-on-pc.ru/info/dvizhenie-materialnoj-tochki-po-ploskoj-krivoj/
http://zaochnik.com/spravochnik/fizika/osnovy-dinamiki/uravnenie-dvizhenija-materialnoj-tochki/