Вращения твердого тела вокруг неподвижной точки
Содержание:
Вращением твердого тела вокруг неподвижной оси называется такое движение твердого тела, при котором хотя бы две его точки остаются неподвижными. Прямая, проходящая через эти неподвижные точки называется осью вращения. Траекториями движения точек твердого тела являются окружности с радиусами равными расстояниям от заданных точек тела до оси вращения.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Вращения твердого тела вокруг неподвижной точки (сферическое движение)
Движение тела вокруг неподвижной точки (центра) называется сферическим движением. Сформулируем определение сферического движения.
Вращением твердого тела вокруг неподвижной точки называют такое движение, при котором одна точка тела остается все время неподвижной, а все остальные точки движутся по кругам, которые расположены на поверхностях сфер, описанных с неподвижной точки.
Одной из главных задач при изучении сферического движения является нахождение величин, характеризующих это движение: положение тела, угловые скорость и ускорение тела, вычисления скоростей и ускорений точек тела.
Рассмотрим движение тела вокруг неподвижного центра О (рис. 2.39). Выберем неподвижную систему отсчета Ox1y1z1, относительно которой будем изучать движение тела, и подвижную — Oxyz, которую жестко свяжем с телом, что движется. Начало обеих систем координат расположим в неподвижном центре.
Для определения положения вращающегося тела относительно неподвижной системы координат Ox1y1z1 необходимо задать относительно этой системы координат положения другой, подвижной системы координат Oxyz, скрепленной с движущимся телом. Для этого Эйлер предложил следующую теорему:
«Произвольное перемещение твердого тела вокруг неподвижной точки можно выполнить тремя последовательными поворотами тела вокруг трех осей, проходящих через неподвижную точку».

Согласно этой теореме положения тела, вращающегося вокруг неподвижной точки, определяется тремя углами. Линия ОК, вдоль которой пересекаются плоскости Oxy и Ox1y1 называется линией узлов. Тогда положения подвижных осей координат x, y, z (рис. 2.39) по отношению к неподвижной системе отсчета Ox1y1z1 можно определить тремя углами:
 ,
,
 ,
,
 .
.
Эти углы носят название углов Эйлера и имеют следующие наименования:
1.  — угол прецессии, изменение которого означает вращение тела вокруг оси Oz1, которая называется осью прецессии;
— угол прецессии, изменение которого означает вращение тела вокруг оси Oz1, которая называется осью прецессии;
2.  — угол нутации, изменение которого характеризует вращение тела вокруг линии узлов ОК, которая является осью нутации;
— угол нутации, изменение которого характеризует вращение тела вокруг линии узлов ОК, которая является осью нутации;
3. φ — угол собственного вращения, изменение которого означает вращение тела вокруг оси Oz, которая является осью собственного вращения.
Первый угол y, угол прецессии, который определяет положение линии узлов ОК относительно неподвижной координатной оси Ox1, считается положительным, если он отсчитывается при повороте линии узлов ОК против часовой стрелки, если смотреть навстречу оси Oz1.
Вторым углом Эйлера является угол нутации , угол между координатными плоскостями x1Oy1 и xOy, который можно измерять между перпендикулярами к указанным плоскостям — Oz1 и Oz. Положительное направление угла — поворот против часовой стрелки оси Oz вокруг точки О, если смотреть навстречу линии узлов ОК. Угол отсчитывается от оси Oz1.
Для полного определения положения данного тела относительно неподвижной системы Ox1y1z1 необходимо задать угол между подвижной осью Ох и положительным направлением линии узлов ОК — угол собственного вращения φ. Этот угол считается положительным, если он меняется против часовой стрелки, смотря навстречу оси Oz.
При изменении угла φ тело вращается вокруг оси собственного вращения Oz, перпендикулярной плоскости, где расположены прямые ОК и Ox, образующих этот угол. Таким образом, угол φ определяет положение подвижной координатной оси Ox относительно линии узлов ОК.
Углы Эйлера широко применяются в теории гироскопа. Движение гироскопа, симметричного тела с неподвижной точкой на оси симметрии, которое очень быстро (30-40 тысяч об/мин.) вращается вокруг этой оси, можно представить составленным из трех движений, которые определяются углами , , φ . Изменение углов и имеет скорость на 1-2 порядка ниже, чем угла собственного вращения φ.
При вращении тела вокруг неподвижной точки в общем случае изменяются все три угла Эйлера: , , φ. Эти углы являются независимыми параметрами, которые определяют положение тела при сферическом движении относительно неподвижной системы координат. Задание трех углов Эйлера, как функции времени, являются необходимыми и достаточными условиями для полного описания сферического движения.
Следовательно, для определения положения тела с одной неподвижной точкой в любой момент времени необходимо задать углы Эйлера как однозначные и непрерывные функции времени:
 ,
,
 ,
,
 .
.
Уравнение является кинематическими уравнениями вращения твердого тела вокруг неподвижной точки. Если эти уравнения заданы, то в любой момент времени может быть определено положение твердого тела относительно неподвижной системы координат.
Действительно, отложим сначала в плоскости x1Oy1 от оси Ox1 угол прецессии y против часовой стрелки, если он положительный, и определим положение линии узлов ОК. Далее отложим угол q от оси Oz1, плоскость которого перпендикулярна линии узлов ОК, и определим положение оси z собственного вращения. И наконец, отложим в плоскости xOy угол φ от линии узлов против часовой стрелки, если он положительный, и определим положение оси Ox. Положение тела определено однозначно.
Теорема Эйлера – Даламбера
Произвольное элементарное перемещение тела, имеющего одну неподвижную точку, может осуществляться по одному элементарному повороту вокруг некоторой специально выбранной мгновенной оси вращения, проходящей через эту неподвижную точку.
Предположим, что положение тела, которое вращается вокруг точки О, определяется углами , , φ (как это показано на рис. 2.39).
Тогда его перемещения за элементарный промежуток времени можно представить как совокупность поворотов на углы d, d, dφ, вокруг оси Oz1, линии узлов ОК и оси Oz соответственно. Прибавляясь, эти три поворота создадут одно действительное элементарное перемещение тела.
Сначала рассмотрим, каким будет результат сложения поворотов вокруг осей Oz и Oz1, (рис. 2.40). При повороте на угол dφ любая точка тела, лежащего в плоскости Ozz1 (внутри угла zOz1), получит элементарное перемещение, которое перпендикулярно этой плоскости и численно равна  ,
,  — расстояние от точки до оси Oz. Одновременно, при повороте вокруг оси Oz1 та же точка получит обратное перемещение, которое численно равна
— расстояние от точки до оси Oz. Одновременно, при повороте вокруг оси Oz1 та же точка получит обратное перемещение, которое численно равна  .
.

Внутри угла  обязательно найдется такая точка В, для которой
обязательно найдется такая точка В, для которой  =
=  . Это означает, что перемещение этой точки равно нулю, и точка B будет неподвижной. Таким образом, имеем две неподвижные точки O и В, следовательно, неподвижную ось ОВ, вокруг которой происходит то самое элементарное вращение, которое составляет сумму вращений вокруг осей Oz и Oz1.
. Это означает, что перемещение этой точки равно нулю, и точка B будет неподвижной. Таким образом, имеем две неподвижные точки O и В, следовательно, неподвижную ось ОВ, вокруг которой происходит то самое элементарное вращение, которое составляет сумму вращений вокруг осей Oz и Oz1.
Если теперь рассматривать вращения вокруг оси ОВ и линии узлов ОК, после аналогичных соображений придем к выводу, что элементарные повороты вокруг осей ОВ и ОК эквивалентны элементарному повороту вокруг некоторой оси ОР, проходящей через точку О.
Таким образом, ось ОР, элементарным поворотом вокруг которой тело перемещается из данного положения в соседнее, бесконечно близкое данному называется мгновенной осью вращения.
Следует заметить, что от неподвижной мгновенная ось вращения отличается тем, что ее положение меняется как в отношении системы отсчета Ox1y1z1, так и в отношении подвижной системы координат Oxyz. Каждое последующее вращение происходит вокруг своей мгновенной оси вращения, которая, безусловно, всегда пересекает неподвижную точку О.
То есть, движение твердого тела вокруг неподвижной точки состоит из серии последовательных элементарных поворотов вокруг мгновенных осей вращения, которые пересекают неподвижную точку.
Геометрическое место мгновенных осей вращения относительно неподвижной системы отсчета называется недвижимым аксоидом. Неподвижный аксоид является конической поверхностью с вершиной в неподвижной точке тела, потому что все мгновенные оси пересекают неподвижную точку.
Геометрическое место мгновенных осей во вращающемся теле называют подвижным аксоидом, который также является конической поверхностью. Для каждого движения твердого тела вокруг неподвижной точки имеем пару аксоидов. Таким образом, во вреся сферического движения подвижной аксоид катится по неподвижному без скольжения, поскольку общая образующая этих аксоидов в каждый момент времени служит мгновенной осью, вокруг которой вращается тело, поэтому все точки оси неподвижные. Если подвижный аксоид катится без скольжения по неподвижному аксоиду, то происходит движение тела вокруг неподвижной точки.
Кинематические характеристики движения тела вокруг неподвижной точки
Угловая скорость:
Сделаем сначала определения угловой скорости тела, вращающегося вокруг неподвижной точки.
Угловая скорость, с которой происходит элементарный поворот тела вокруг мгновенной оси вращения, называется угловой скоростью тела в данный момент времени или мгновенной угловой скоростью тела.
Согласно этому определению, если тело вернется вокруг мгновенной оси на некоторое бесконечно малый угол dφ, то мгновенной угловой скоростью будет:
 .
.
Угловую скорость можно изобразить в виде вектора  , направленного вдоль мгновенной оси ОР (рис. 2.41).
, направленного вдоль мгновенной оси ОР (рис. 2.41).

Если учесть, что положение мгновенной оси ОР непрерывно меняется, то вектор угловой скорости  будет меняться в течении времени как по модулю, так и по направлению, а конец вектора будет описывать некоторую произвольную кривую AB, которая является годографом вектора
будет меняться в течении времени как по модулю, так и по направлению, а конец вектора будет описывать некоторую произвольную кривую AB, которая является годографом вектора  . На рис. 2.41 показаны различные положения мгновенной оси вращения OP, OP1, OP2 и соответственно расположенные на них векторы угловой скорости
. На рис. 2.41 показаны различные положения мгновенной оси вращения OP, OP1, OP2 и соответственно расположенные на них векторы угловой скорости  ,
,  и
и  .
.
Угловое ускорение:
Второй кинематической характеристикой тела, вращающегося вокруг неподвижной точки является угловое ускорение.
Угловое ускорение тела в данный момент времени, или мгновенное угловое ускорение  , которое характеризует изменение в течении времени угловой скорости
, которое характеризует изменение в течении времени угловой скорости  по модулю и по направлению, является векторной величиной и численно равна:
по модулю и по направлению, является векторной величиной и численно равна:
 .
.
Для нахождения расположения вектора углового ускорения можно использовать такую аналогию. Как известно, вектор скорости  произвольной точки равен производной от радиус-вектора
произвольной точки равен производной от радиус-вектора  этой точки по времени t и направлен вдоль касательной к траектории движения точки. В этом случае траектория точки является годографом концов радиус-векторов .
этой точки по времени t и направлен вдоль касательной к траектории движения точки. В этом случае траектория точки является годографом концов радиус-векторов .
По аналогии с этим, вектор углового ускорения направлен по касательной к кривой AB в соответствующей точке. То есть, угловое ускорение можно считать, как скорость движения конца вектора  .
.
Таким образом, вектор мгновенного углового ускорения имеет направление производной по времени от вектора мгновенной угловой скорости , он параллельный касательной к годографу векторной функции (t). Изображать угловое ускорение необходимо вектором, параллельный касательно к годографу векторов угловой скорости в данной точке, но приложенный к неподвижной точке O (рис. 2.40).
Скорости и ускорения точек тела в сферическом движении
Векторная формула Эйлера (2.54), полученная для вращательного движения тела вокруг неподвижной оси, справедлива и для сферического движения тела.
В сферическом движении в каждый момент времени тело вращается вокруг мгновенной оси OP, которая пересекает неподвижную точку O, с угловой скоростью , вектор которой расположен на мгновенной оси. Точки тела, которые принадлежат мгновенной оси OP, имеют скорости  , равны нулю, как и в случае неподвижной оси вращения.
, равны нулю, как и в случае неподвижной оси вращения.
Следовательно, скорость  произвольной точки М тела (рис. 2.42) определяется как векторное произведение и
произвольной точки М тела (рис. 2.42) определяется как векторное произведение и  . А именно:
. А именно:
 ,
,
где — радиус-вектор точки M относительно неподвижной точки О.
Модуль скорости при этом будет равен:
 ,
,
где h — кратчайшее расстояние точки к мгновенной оси OP.
Таким образом, скорости точек тела в сферическом движении пропорциональны расстояниям от этих точек к мгновенной оси. Направление вектора скорости перпендикулярно плоскости, в которой расположены векторы и , то есть расстоянию h и направлен в сторону вращения.

Как известно, скорость точки является первой производной от радиус-вектора этой точки по времени (2.4):
 .
.
В то же время, по векторной формуле (2.54) скорость равна , откуда:

Длина радиус-вектора , как расстояние между двумя точками твердого тела, является постоянной величиной при движении этого тела. Следовательно, уравнение (2.77) можно рассматривать как формулу для вычисления производной по времени от вектора, модуль которого устойчивый, а изменение его происходит только вследствие вращения с угловой скоростью вместе с телом вокруг неподвижной точки.
Если жестко скрепить подвижную систему координат Oxyz с телом, вращающимся вокруг неподвижной точки с угловой скоростью , так для единичных векторов  ,
,  ,
,  , направленных по этим осям, модули которых постоянные, на основании (2.77) имеем:
, направленных по этим осям, модули которых постоянные, на основании (2.77) имеем:
 ,
,
 ,
,
 .
.
Выражения называют формулами Пуассона.
Для определения ускорения точки тела, которое осуществляет сферическое движение, возьмем производную по скалярному аргументу t (время) от векторной функции скорости :
 .
.
 ,
,
 .
.
тогда окончательно имеем:

В отличии от вышеупомянутой формулы, здесь и — угловые скорость и ускорение вокруг мгновенных осей, первое слагаемое — вращательное ускорение:
 ,
,
второе слагаемое — осевое ускорение:
 .
.
Движение свободного твердого тела
Рассмотрим наиболее общий случай движения твердого тела — свободное движение тела, когда оно может как угодно перемешиваться относительно неподвижной системы отсчета Oxyz (рис. 2.43).
Как известно из аналитической геометрии, положения твердого тела в пространстве можно определить тремя точками, которые не расположены на одной прямой и неизменно связаны с телом.

На девять координат этих точек наложено три ограничения, которые выражают неизменность расстояний между точками, потому что они принадлежат твердому телу. Итак, независимых параметров или степеней свободы тела будет шесть.
Смотря с другой стороны, при определении положения твердого тела можно задать три координаты одной его точки, например, точки A, которую назовем полюсом с координатами  ,
,  ,
,  , и выбрать еще три параметра, характеризующих вращения тела вокруг полюса. Остальные параметры могут быть углами Эйлера , , φ (на рис. 2.43 не показаны). Совокупность шести скалярных функций времени, которые однозначно определяют положение свободного твердого тела в любой момент времени, является законом его движения:
, и выбрать еще три параметра, характеризующих вращения тела вокруг полюса. Остальные параметры могут быть углами Эйлера , , φ (на рис. 2.43 не показаны). Совокупность шести скалярных функций времени, которые однозначно определяют положение свободного твердого тела в любой момент времени, является законом его движения:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Три первые уравнения определяют движение полюса и вместе с ним поступательное движение твердого тела. Последние три уравнения определяют движение тела относительно системы координат  (то есть относительно точки A, как неподвижной).
(то есть относительно точки A, как неподвижной).
Таким образом, с геометрической точки зрения элементарное перемещение свободного тела состоит из поступательного перемещения вместе с полюсом, при котором полюс переходит в соседнее положение  , и с некоторого перемещения по отношению к осям
, и с некоторого перемещения по отношению к осям  .
.
Последнее перемещения по теореме Эйлера-Даламбера является поворотом вокруг мгновенной оси вращения  , которая проходит через точку A.
, которая проходит через точку A.
Поскольку движением тела является совокупность элементарных перемещений, то можно его обозначить следующим образом:
«Свободное движение тела в общем случае состоит из поступательного движения, при котором все точки тела движутся как произвольно выбранный полюс A со скоростью полюса  , и ряда элементарных поворотов с угловой скоростью ω вокруг мгновенных осей вращения, которые проходят через полюс» (рис. 2.44).
, и ряда элементарных поворотов с угловой скоростью ω вокруг мгновенных осей вращения, которые проходят через полюс» (рис. 2.44).

Свободно движутся брошенный камень, снаряд, неуправляемая ракета тому подобное.
Основными кинематическими характеристиками движения является скорость и ускорение  полюса, которые определяют скорость и ускорение поступательной части движения, а также угловая скорость ω и угловое ускорение ε вращения вокруг полюса. Значения величин этих характеристик можно определить по уравнениям.
полюса, которые определяют скорость и ускорение поступательной части движения, а также угловая скорость ω и угловое ускорение ε вращения вокруг полюса. Значения величин этих характеристик можно определить по уравнениям.
В отдельном случае движение свободного тела может быть плоскопараллельным. Тогда вектор угловой скорости  будет всегда перпендикулярен плоскости движения. При этом, как в общем случае, так и в отдельном, вращающаяся часть движения, как и значение угловой скорости ω, от выбора полюса не зависит.
будет всегда перпендикулярен плоскости движения. При этом, как в общем случае, так и в отдельном, вращающаяся часть движения, как и значение угловой скорости ω, от выбора полюса не зависит.
Определим скорости и ускорения точек свободного тела.
Как и в случае плоскопараллельного движения, можно предположить, что скорость и ускорение точки свободного тела состоит геометрически со скорости ускорения векторов полюса и относительной скорости (ускорение) точки вокруг полюса (последние получает точка M при движении вместе с телом вокруг полюса A)
 ,
,
 ,
,
где  ;
;  ;
;  — радиус-вектор точки M относительно полюса A;
— радиус-вектор точки M относительно полюса A;  — скорость точки M относительно полюса A;
— скорость точки M относительно полюса A;  — ускорение точки M относительно полюса A; ε — угловое ускорение тела.
— ускорение точки M относительно полюса A; ε — угловое ускорение тела.
Услуги по теоретической механике:
Учебные лекции:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Вращательное движение тела. Закон вращательного движения
В этой статье описывается важный раздел физики — «Кинематика и динамика вращательного движения».
Основные понятия кинематики вращательного движения
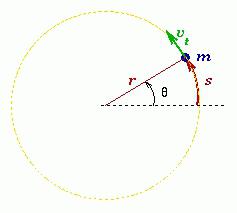
Вращательным движением материальной точки вокруг неподвижной оси называют такое движение, траекторией которого является окружность, находящаяся в плоскости перпендикулярной к оси, а центр ее лежит на оси вращения.
Вращательное движение твердого тела — это движение, при котором по концентрическим (центры которых лежат на одной оси) окружностям движутся все точки тела в соответствии с правилом для вращательного движения материальной точки.
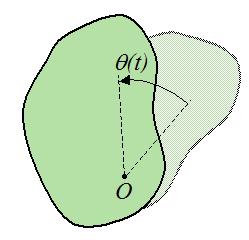
Пусть произвольное твердое тело T совершает вращения вокруг оси O, которая перпендикулярна плоскости рисунка. Выберем на данном теле точку M. При вращении эта точка будет описывать вокруг оси O круг радиусом r.
Через некоторое время радиус повернется относительно исходного положения на угол Δφ.
За положительное направление поворота принято направление правого винта (по часовой стрелке). Изменение угла поворота со временем называется уравнением вращательного движения твердого тела:
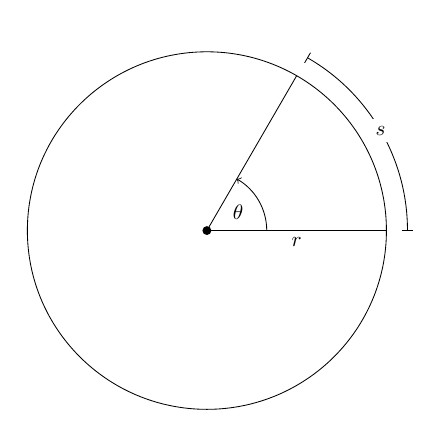
Если φ измерять в радианах (1 рад — это угол, соответствующий дуге, длиной равной ее радиусу), то длина дуги окружности ΔS, которую пройдет материальная точка M за время Δt, равна:
Основные элементы кинематики равномерного вращательного движения
Мерой перемещения материальной точки за небольшой промежуток времени dt служит вектор элементарного поворота dφ.
Угловая скорость материальной точки или тела — это физическая величина, которая определяется отношением вектора элементарного поворота к продолжительности этого поворота. Направление вектора можно определить правилом правого винта вдоль оси О. В скалярном виде:
Если ω = dφ/dt = const, то такое движение называется равномерное вращательное движение. При нем угловую скорость определяют по формуле
Согласно предварительной формуле размерность угловой скорости
Равномерное вращательное движение тела можно описать периодом вращения. Период вращения T — физическая величина, определяющая время, за которое тело вокруг оси вращения выполняет один полный оборот ([T] = 1 с). Если в формуле для угловой скорости принять t = T, φ = 2 π (полный один оборот радиуса r), то
поэтому период вращения определим следующим образом:
Число оборотов, которое за единицу времени совершает тело, называется частотой вращения ν, которая равна:
Единицы измерения частоты: [ν]= 1/c = 1 c -1 = 1 Гц.
Сравнивая формулы для угловой скорости и частоты вращения, получим выражение, связывающее эти величины:
Основные элементы кинематики неравномерного вращательного движения
Неравномерное вращательное движение твердого тела или материальной точки вокруг неподвижной оси характеризует его угловая скорость, которая изменяется со временем.
Вектор ε, характеризующий скорость изменения угловой скорости, называется вектором углового ускорения:
Если тело вращается, ускоряясь, то есть dω/dt > 0, вектор имеет направление вдоль оси в ту же сторону, что и ω.
Если вращательное движение замедлено — dω/dt 2 /r = ω 2 r 2 /r.
Итак, в скалярном виде
Тангенциальное ускоренной материальной точки, которая выполняет вращательное движение
Момент импульса материальной точки
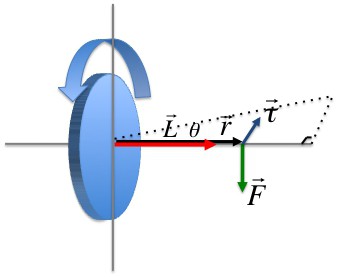
Векторное произведение радиуса-вектора траектории материальной точки массой mi на ее импульс называется моментом импульса этой точки касательно оси вращения. Направление вектора можно определить, воспользовавшись правилом правого винта.
Момент импульса материальной точки (Li) направлен перпендикулярно плоскости, проведенной через ri и υi, и образует с ними правую тройку векторов (то есть при движении с конца вектора ri к υi правый винт покажет направление вектора Li).
В скалярной форме
Учитывая, что при движении по кругу радиус-вектор и вектор линейной скорости для i-й материальной точки взаимно перпендикулярные,
Так что момент импульса материальной точки для вращательного движения примет вид
Момент силы, которая действует на i-ю материальную точку
Векторное произведение радиуса-вектора, который проведен в точку приложения силы, на эту силу называется моментом силы, действующей на i-ю материальную точку относительно оси вращения.
В скалярной форме
Величина li, равная длине перпендикуляра, опущенного из точки вращения на направление действия силы, называется плечом силы Fi.
Динамика вращательного движения
Уравнение динамики вращательного движения записывается так:
Формулировка закона следующая: скорость изменения момента импульса тела, которое совершает вращение вокруг неподвижной оси, равна результирующему моменту относительно этой оси всех внешних сил, приложенных к телу.
Момент импульса и момент инерции
Известно, что для i-й материальной точки момент импульса в скалярной форме задается формулой
Если вместо линейной скорости подставить ее выражение через угловую:
то выражение для момента импульса примет вид
Величина Ii = miri 2 называется моментом инерции относительно оси i-й материальной точки абсолютно твердого тела, проходящей через его центр масс. Тогда момент импульса материальной точки запишем:
Момент импульса абсолютно твердого тела запишем как сумму моментов импульса материальных точек, составляющих данное тело:
Момент силы и момент инерции
Закон вращательного движения гласит:
Известно, что представить момент импульса тела можно через момент инерции:
Учитывая, что угловое ускорение определяется выражением
получим формулу для момента силы, представленного через момент инерции:
Замечание. Момент силы считается положительным, если угловое ускорение, которым он вызван, больше нуля, и наоборот.
Теорема Штейнера. Закон сложения моментов инерции
Если ось вращения тела через центр масс его не проходит, то относительно этой оси можно найти его момент инерции по теореме Штейнера:
I = I0 + ma 2 ,
где I0 — начальный момент инерции тела; m — масса тела; a — расстояние между осями.
Если система, которая совершает обороты округ неподвижной оси, состоит из n тел, то суммарный момент инерции такого типа системы будет равен сумме моментов, ее составляющих (закон сложения моментов инерции).
Тема 1.10. Вращения тела вокруг неподвижной оси
§1. Движение тела по окружности с постоянной по модулю скоростью
Движение тела по окружности с постоянной по модулю скоростью — это движение, при котором тело за любые равные промежутки времени описывает одинаковые дуги.
Положение тела на окружности определяется радиусом-вектором , проведенным из центра окружности. Модуль радиуса-вектора равен радиусу окружности R (рис. 1).
Рис.1. Движения тела по окружности
За время ∆t тело, двигаясь из точки А в точку В, совершает перемещение , равное хорде АВ, и проходит путь, равный длине дуги l.
Радиус-вектор поворачивается на угол ∆φ. Угол выражают в радианах.
Скорость движения тела по траектории (окружности) направлена по касательной к траектории. Она называется линейной скоростью. Модуль линейной скорости равен отношению длины дуги окружности l к промежутку времени ∆t, за который эта дуга пройдена:
Скалярная физическая величина, численно равная отношению угла поворота радиуса-вектора к промежутку времени, за который этот поворот произошел, называется угловой скоростью:
В СИ единицей угловой скорости является радиан в секунду .
При равномерном движении по окружности угловая скорость и модуль линейной скорости — величины постоянные: ω=const; v=const.
Положение тела можно определить, если известен модуль радиуса- вектора и угол φ, который он составляет с осью Ох (угловая координата). Если в начальный момент времени t0=0 угловая координата равна φ0, а в момент времени t она равна φ, то угол поворота ∆φ радиуса-вектора за время ∆t=t-t0 равен ∆φ=φ-φ0. Тогда из последней формулы можно получить кинематическое уравнение движения материальной точки по окружности: φ=φ0+ωt
Оно позволяет определить положение тела в любой момент времени t.
— формула связи между линейнойи угловой скоростью.
Промежуток времени Т, в течение которого тело совершает один полный оборот, называется периодом вращения: где N – число оборотов, совершенных телом за время Δt.
За время ∆t=Т тело проходит путь l=2πR. Следовательно,
Величина ϑ, обратная периоду, показывающая, сколько оборотов совершает тело за единицу времени, называется частотой вращения:
§2. Ускорение при движении тела по окружности с постоянной по модулю скоростью (центростремительное ускорение)
При равномерном вращении по окружности модуль скорости движения тела не изменяется, но направление скорости изменяется непрерывно. Следовательно, данное движение — движение с ускорением. Оно характеризует быстроту изменения скорости по направлению.
Рис.2. Равномерное движение тела по окружности
направлено по радиусу к центру и поэтому называется центростремительным ускорением:
Модуль , направление непрерывно изменяется (рис. 3). Поэтому данное движение не является равноускоренным.
Рис.3. Направление центростремительного ускорения
§3.Вращательное движение твердого тела вокруг оси. Угловая скорость и угловое ускорение
Для кинематического описания вращательного движения абсолютно твердого тела вокруг неподвижной оси используются те же величины, что и для описания движения материальной точки по окружности.
Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными (рис.4).
Промежуток времени, в течение которого тело совершает один полный оборот вокруг оси, — период вращения (Т). Величина, обратная периоду, — частота вращения (ν).
Проходящая через неподвижные точки А и В прямая АВ называется осью вращения.
Так как расстояния между точками твердого тела должны оставаться неизменными, то очевидно, что при вращательном движении все точки, принадлежащие оси вращения, будут неподвижны, а все остальные точки тела будут описывать окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси.
Для определения положения вращающегося тела проведем через ось вращения, вдоль которой направим ось Az, полуплоскость — неподвижную и полуплоскость, врезанную в само тело и вращающуюся вместе с ним (рис. 4).
http://www.syl.ru/article/189925/new_vraschatelnoe-dvijenie-tela-zakon-vraschatelnogo-dvijeniya
http://www.sites.google.com/site/tehmehprimizt/lekcii/teoreticeskaa-mehanika/kinematika/vrasenia-tela-vokrug-nepodviznoj-osi