Движение центра масс системы
Допустим, что у нас есть некоторая система, состоящая из n -ного количества материальных точек. Возьмем одну из них и обозначим ее массу как m k . Приложенные к точке внешние силы (как активные силы, так и реакции связей) имеют равнодействующую F k e . Внутренние силы имеют равнодействующую F k l . Наша система находится в движении, следовательно, нужная точка будет иметь ускорение a k . Зная основной закон динамики, мы можем записать следующую формулу:
m k a k = F k e + F k l .
Ее можно применить к любой точке системы. Значит, для всей системы целиком можно сформулировать следующие уравнения:
m 1 a 1 = F 1 e + F 1 l , m 2 a 2 = F 2 e + F 2 l , ⋯ m n a n = F n e + F n l .
Данная формула состоит из дифференциальных уравнений, описывающих движение системы в векторной форме. Если мы спроецируем эти равенства на соответствующие координатные оси, то у нас получатся дифференциальные уравнения движения в проекциях. Но в конкретных задачах чаще всего вычислять движение каждой точки системы не требуется: можно ограничиться характеристиками движения всей системы в целом.
Движение центра масс: основная теорема
Характер движения системы можно определить, зная закон, по которому движется ее центр масс.
Центр инерции системы (центр масс) – это воображаемая точка с радиус-вектором R , выражаемым через радиус-векторы r 1 , r 2 , . . . соответствующих материальных точек по формуле R = m 1 r 1 + m 2 r 2 + . . . + m n r n m .
Здесь сумма показателей в числителе m = m 1 + m 2 + . . . + m 3 выражает общую массу всей системы.
Для нахождения этого закона нам нужно взять уравнения движения системы, приведенные в предыдущем пункте, и сложить их правые и левые части. У нас получится, что:
∑ m k a k ¯ = ∑ F k ¯ e + ∑ F k ¯ l .
Взяв формулу радиус-вектора центра масс, получим следующее:
Теперь возьмем вторую производную по времени:
Здесь буквой a c ¯ обозначено ускорение, которое приобретает центр масс системы.
Свойство внутренних сил в системе гласит, что F k l равно нулю, значит, окончательное равенство будет выглядеть так:
M a c ¯ = ∑ F k ¯ e .
Это уравнение является записью закона движения центра масс. Запишем его:
Движение центра масс системы идентично движению материальной точки той же массы, что и вся система целиком, к которой приложены все действующие на систему внешние силы.
Иначе говоря, произведение ускорения центра масс системы на массу самой системы будет равно геометрической сумме всех внешних сил, действующих на эту систему.
Возьмем полученное выше уравнение и спроецируем его правую и левую части на соответствующие координатные оси. У нас получится:
M x c ¨ = ∑ F k x ¯ e , M y c ¨ = ∑ F k y ¯ e , M z c ¨ = ∑ F k z ¯ e .
Эти равенства являются дифференциальными уравнениями движения центра масс в проекции на оси в декартовой системе координат.
Практическое значение теоремы о движении центра масс
Данная теорема имеет большую практическую ценность. Поясним, в чем именно она заключается.
- Любое тело, движущееся поступательно, может быть рассмотрено в качестве материальной точки, масса которой равна массе всего тела. Во всех других случаях такой подход возможен лишь тогда, когда для определения положения тела в пространстве нам будет достаточно знать, в каком положении находится его центр масс. Также важно, чтобы условия задачи допускали исключение вращательной части движения тела.
- С помощью теоремы движения центра масс системы мы можем не рассматривать в задачах неизвестные нам заранее внутренние силы.
Разберем пример применения теоремы для решения практической задачи.
Условие: к оси центробежной машины на нити подвешено кольцо из металла. Оно совершает равномерные вращательные движения с угловой скоростью, равной ω . Вычислите, на каком расстоянии центр кольца находится от оси вращения.
Решение
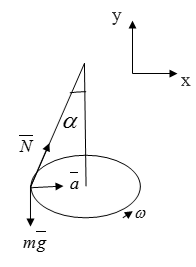
Очевидно, что система находится под воздействием силы тяжести N N ¯ α α . Также необходимо учесть силу натяжения нити и центростремительное ускорение.
Второй закон Ньютона для системы будет выглядеть так:
Теперь создадим проекции обеих частей равенства на оси абсцисс и ординат и получим:
N sin α = m a ; N cos α = m g .
Мы можем разделить одно уравнение на другое:
Поскольку a = υ 2 R , υ = ω R , то нужное нам уравнение будет выглядеть так:
Уравнение движения центра масс
1. Уравнение движения центра масс

2. Уравнение моментов относительно оси, проходящей через центр масс

Особенностью плоского движения является то, что ось вращения сохраняет свою ориентацию в пространстве и остается перпендикулярной плоскости, в которой движется центр масс. Еще раз подчеркнем, что уравнение моментов (3.20) записано относительно, в общем случае, ускоренно движущегося центра масс, однако, как было отмечено в начале лекции, оно имеет такой же вид, как и уравнение моментов относительно неподвижной точки.
В качестве примера рассмотрим задачу о скатывании цилиндра с наклонное плоскости. Приведем два способа решения этой задачи с использованием уравнений динамики твердого тела.
Первый способ. Рассматривается вращение цилиндра относительно оси, проходящее через центр масс (рис. 3.11).
Система уравнений (3.19 — 3.20) имеет вид:
К этой системе необходимо добавить уравнение кинематической связи
Последнее уравнение получается из условия, что цилиндр скатывается без проскальзывания, то есть скорость точки М цилиндра равна нулю.
Уравнение движения центра масс (3.1) запишем для проекций ускорения и сил на ось x вдоль наклонной плоскости, а уравнение моментов (3.22) — для проекций углового ускорения и момента силы трения на ось y , совпадающую с осью цилиндра. Направления осей x и у выбраны согласованно, в том смысле, что положительному линейному ускорению оси цилиндра соответствует положительное же угловое ускорение вращения вокруг этой оси. В итоге получим:
Следует подчеркнуть, что  — сила трения сцепления — может принимать любое значение в интервале от О до
— сила трения сцепления — может принимать любое значение в интервале от О до  (сила трения скольжения) в зависимости от параметров задачи. Работу эта сила не совершает, но обеспечивает ускоренное вращение цилиндра при его скатывании с наклонной плоскости. В данном случае
(сила трения скольжения) в зависимости от параметров задачи. Работу эта сила не совершает, но обеспечивает ускоренное вращение цилиндра при его скатывании с наклонной плоскости. В данном случае
Если цилиндр сплошной, то

Качение без проскальзывания определяется условием

где  — коэффициент трения скольжения,
— коэффициент трения скольжения,  — сила реакции опоры. Это условие сводится к следующему:
— сила реакции опоры. Это условие сводится к следующему:

Второй способ. Рассматривается вращение цилиндра относительно неподвижной оси, совпадающей в данный момент времени с мгновенной осью вращения (рис. 3.12).
Мгновенная ось вращения проходит через точку соприкосновения цилиндра и плоскости (точку М). При таком подходе отпадает необходимость в уравнении движении центра масс и уравнении кинематической связи. Уравнение моментов относительно мгновенной оси имеет вид:

В проекции на ось вращения (ось y)

Ускорение центра масс выражается через угловое ускорение
Кинетическая энергия при плоском движении.
Кинетическая энергия твердого тела представляет собой сумму кинетических энергий отдельных частиц:

где  — скорость центра масс тела,
— скорость центра масс тела,  — скорость i-й частицы относительно системы координат, связанной с центром масс и совершающей поступательное движение вместе с ним. Возводя сумму скоростей в квадрат, получим:
— скорость i-й частицы относительно системы координат, связанной с центром масс и совершающей поступательное движение вместе с ним. Возводя сумму скоростей в квадрат, получим:

так как  (суммарный импульс частиц в системе центра масс равен нулю).
(суммарный импульс частиц в системе центра масс равен нулю).
Таким образом, кинетическая энергия при плоском движении равна сумме кинетических энергий поступательного и вращательного движений (теорема Кенига). Если рассматривать плоское движение как вращение вокруг мгновенной оси, то кинетическая энергия тела есть энергия вращательного движения.
В этой связи задачу о скатывании цилиндра с наклонной плоскости можно решить, используя закон сохранения механической энергии (напомним, что сила трения при качении без проскальзывания работу не совершает).
Приращение кинетической энергии цилиндра равно убыли его потенциальное энергии:
Здесь  — длина наклонной плоскости,
— длина наклонной плоскости,  — момент инерции цилиндра относительно мгновенной оси вращения.
— момент инерции цилиндра относительно мгновенной оси вращения.
Поскольку скорость оси цилиндра  то
то
Дифференцируя обе части этого уравнения по времени, получим

откуда для линейного ускорения  оси цилиндра будем иметь то же выражение, что и при чисто динамическом способе решения (см. (3.27, 3.36)).
оси цилиндра будем иметь то же выражение, что и при чисто динамическом способе решения (см. (3.27, 3.36)).
Замечание. Если цилиндр катится с проскальзыванием, то изменение его кинетической энергии будет определяться также и работой сил трения. Последняя, в отличие от случая, когда тело скользит по шероховатой поверхности, не вращаясь, определяется, в соответствии с (3.14), полным углом поворота цилиндра, а не расстоянием, на которое переместилась его ось.
Динамика твердого тела на данном этапе используется для тел, движущихся в сплошной среде.
В задаче о полете тела с тремя несущими поверхностями при наличии динамической асимметрии определены условия, при которых проявляются синхронизмы 1:3. С увеличением угловой скорости вращения тела около продольной оси даже на поверхности рассеивания заметно ослабление этого эффекта.
Разработана программа имитационного моделирования комплекса задач по динамике полета противоградовых ракет. С ее помощью построены таблицы введения поправок на установочные углы запуска ракет для наилучшей компенсации вредного влияния ветра.
Создана механико-математическая модель полета бумеранга. Открыта лаборатория навигации и управления.
Разработан и внедрен на аэродинамической трубе А-8 комплекс механического оборудования и сопутствующей измерительной аппаратуры для проведения динамических испытаний моделей. Определены коэффициенты демпфирования поперечных колебаний осесимметричных оперенных тел различного удлинения при раскрутке вокруг собственной оси в до- и сверхзвуковом потоках.
На основе численного решения задачи о плоских движениях аэродинамического маятника (с несущей поверхностью в виде прямоугольной пластины) в несжимаемой жидкости с учетом динамики вихрей определены области существования всех типов движения маятника, включая режимы автоколебаний и авторотации. Открыта лаборатория сверхзвуковой аэродинамики.
Также в институте компьютерных исследований проводят значимые исследования по динамике твердого тела.
Это направление исследований института связано с анализом движения твердого тела с широким применением компьютерных методов.
Компьютерные исследования в динамике твердого тела относятся к отдельной области науки — компьютерной динамике, которая устанавливает общие закономерности движения систем при помощи различных численных методов и алгоритмов.
В сочетании с аналитическими методами, достижениями топологии, анализа, теории устойчивости и других методов компьютерная динамика применяется, главным образом, в исследовании интегрируемых задач, в частности, динамических проблем теории волчков. Такой подход позволяет получить достаточно полное представление о движении, разобраться во всем его многообразии и наглядно представить себе каждое конкретное движение и его особенности.
Помимо анализа интегрируемых ситуаций в институте начато исследование случаев хаотического поведения в динамике твердого тела. Эти исследования, которые ранее почти не проводились, основаны на широком применении высокоточного компьютерного моделирования. Ожидается, что изучение этой области динамики твердого тела позволит получить в перспективе много новых интересных результатов.
Кроме того, в институте проводятся исследования с использованием методов пуассоновой динамики и геометрии, теории групп и алгебр Ли — методов, которые во многом возникли из задач динамики твердого тела.
Движение центра масс системы
Вы будете перенаправлены на Автор24
Дифференциальные уравнения движения системы
Рассмотрим систему, состоящую из $n$ материальных точек. Выделим какую-нибудь точку системы с массой $m_
Аналогичный результат получим для любой точки. Следовательно, для всей системы будет:
Уравнения (1) представляют собой дифференциальные уравнения движения системы в векторной форме.
Проектируя равенства (1) на координатные оси, получим уравнения движения системы в дифференциальной форме в проекциях на эти оси.
Однако при решении многих конкретных задач необходимость находить закон движения каждой из точек системы не возникает, а бывает достаточно найти характеристики, определяющие движение всей системы в целом.
Теорема о движении центра масс системы
Для определения характера движения системы требуется знать закон движения ее центра масс. Центром масс или центром инерции системы называется такая воображаемая точка, радиус-вектор $R$которой выражается через радиус векторы $r_ <1>,r_ <2>. $материальных точек по формуле:
где $m=m_ <1>+m_ <2>+. +m_
Чтобы найти этот закон, обратимся к уравнениям движения системы (1) и сложим почленно их левые и правые части. Тогда получим:
Из формулы (2) имеем:
Беря вторую производную по времени, получаем:
Так как по свойству внутренних сил в системе $\sum \overline
Готовые работы на аналогичную тему
Уравнение (5) выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил или центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему.
Проецируя обе части равенства (5) на координатные оси, получим:
Эти уравнения представляют собой дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат.
Значение теоремы состоит в следующем:
- Поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе тела. В остальных случаях тело можно рассматривать как материальную точку лишь тогда, когда практически для определения положения тела достаточно знать положение его центра масс и допустимо по условиям задачи не принимать во внимание вращательную часть движения тела;
- Теорема позволяет исключать из рассмотрения все наперед неизвестные внутренние силы. В этом ее практическая ценность.
Металлическое кольцо, подвешенное на нити к оси центробежной машины равномерно вращается с угловой скоростью $\omega $. Нить составляет угол $\alpha $с осью. Найти расстояние от центра кольца до оси вращения.
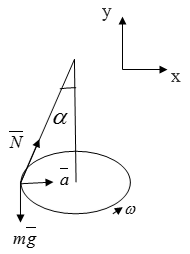
На нашу систему действует сила тяжести $\overline
Запишем второй закон Ньютона для нашей системы:
Спроецируем обе части на оси x и y:
\[\left\< \begin
Разделив одно уравнение на другое, получим:
Так как $a=\frac
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 07 12 2021
http://kazedu.com/referat/52905/2
http://spravochnick.ru/fizika/dinamika/dvizhenie_centra_mass_sistemy/