Скорость и ускорение точки в полярных координатах


Скорость и ускорение точки в полярных координатах
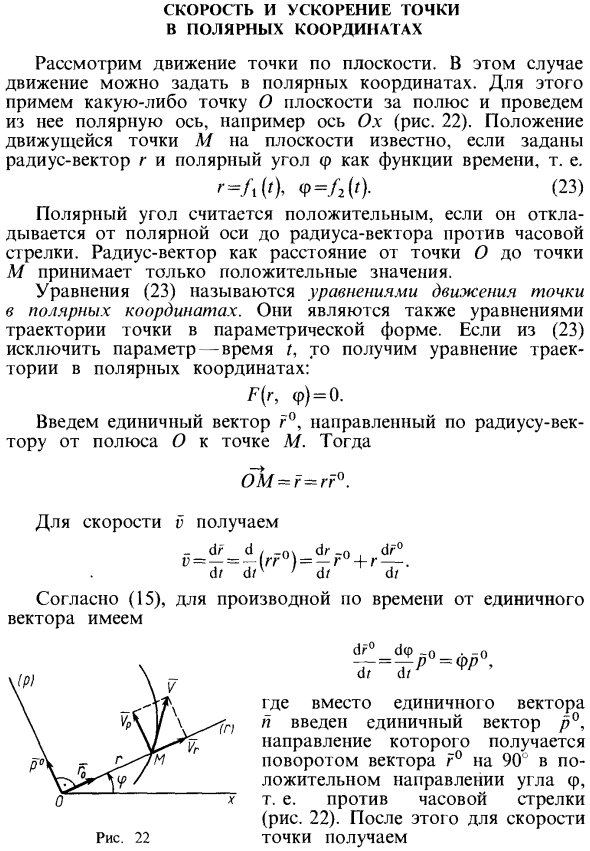
- Рассмотрим движение точек на плоскости. В этом случае движение может быть задано в полярных координатах. Для этого возьмите точку O на плоскости в качестве полюса и нарисуйте от нее полярную ось, например, ось быка (рис. 22). Если радиус-вектор r и полярный угол = f2 (t) — (23). Полярный угол считается положительным, если он простирается от полярной оси против часовой стрелки до радиус-вектора. Радиус-вектор как расстояние от точки О до точки М принимает только положительные значения.
Уравнение (23) называется уравнением движения для полярных точек. Это также параметрические точечные траекторные уравнения. Исключение параметра-времени t из (23) дает орбитальное уравнение в полярных координатах. F (r, r = rr °, gr = gfr °. Для проекции скорости на ось, положительное направление которой совпадает с направлением единичного вектора r ° и jr с (24), vr = r, gr = gf. (26) Их называют лучевой и боковой скоростями соответственно. В зависимости от знака производной мицелия лучевая и боковая скорости являются как положительными, так и отрицательными. Используйте (24), чтобы определить ускорение точки в полярных координатах. У нас есть a = dv / dl = (d / d /) (rr 0 + gfr °).
Потенциальная энергия N материальной точки в мыслимой точке силового поля M осуществляется силой поля, действующей на материальную точку при перемещении из точки M в начальную точку Mo, т. Людмила Фирмаль
Проведите дифференциацию и получите a = rf ° + r + r fr 0 + r fr 0 + r f. Для производной по времени единичного вектора p ° dp0 / d ^ = φ (-r0), Вектор p ° вращается с той же угловой скоростью φ, что и вектор r °, поэтому единичным вектором, на который направлен вектор dp ° / dt, является вектор (-r °). Ускоряя производную единичного вектора и подставляя ее в уравнение, объединяющее члены, получаем в = (r-rf2) r ° + (rf + 2rf) p °. (27) Получены точечные ускорения разложения на радиальные ар и боковые ап компоненты. a = a, + ap, ar = (r-rf2) r °, ar = (rf + 2rf) p °. Для проекции ускорений на оси Or и Op получаем a, = r-rp2, ap = rp + 2rp. (28).
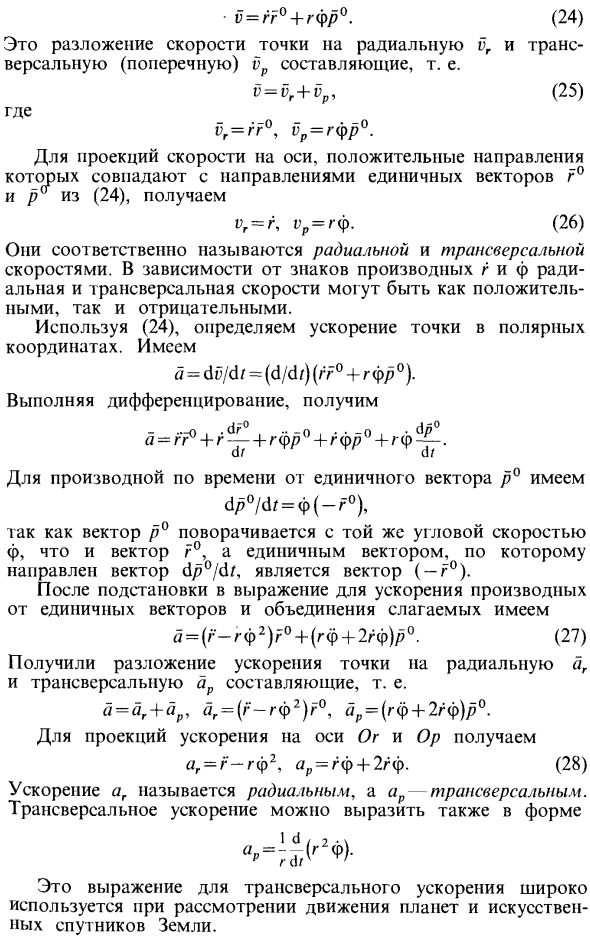
Ускорение ar называется радиальным, поперечным направлением. Боковое ускорение также может быть выражено в следующем формате: Эта формула для бокового ускорения широко используется при рассмотрении движения планет и искусственных спутников Земли. Рисунок 23 Равные производные по Поскольку радиальная и боковая составляющие ускорения перпендикулярны друг другу, Для фиксированных координатных осей Ox, Oy и Oz формула ax = dvx / dt, ay = dvy / dt, a2 = dv: / dt. Для подвижных осей Or и Op, как видно из (26) и (28), a и ap не являются временами от vr и vp. Особый случай.
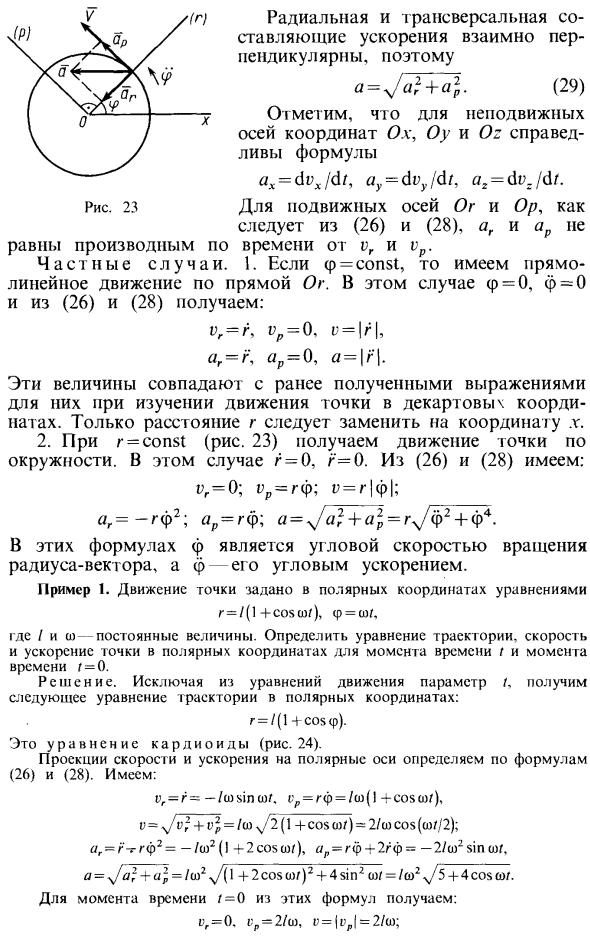
- В этих уравнениях φ — угловая скорость вращения радиус-вектора, а φ — его угловое ускорение. Пример 1. Движение точки — это уравнение r = / (l + COSOH), φ = ШГ, Где я и со постоянные значения. Определить скорость и ускорение точки в полярных координатах траектории уравнения, времени t и момента Решения. Из уравнения движения уберите следующее уравнение для орбиты в полярных координатах: r = f (1 + C0 $ f). Это кардиоидное уравнение (рис. 24).
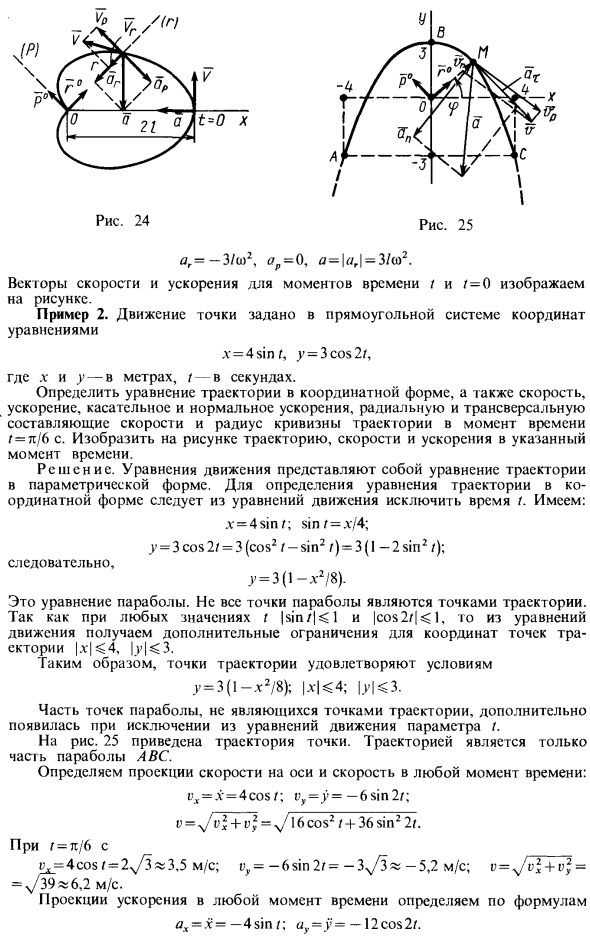
Проекции скорости и ускорения на полярную ось определяются уравнениями (26) и (28). У нас есть: Мы получаем «, = / = — / Eosin South. 1> = Гф = / ш (1 + COSO) /), t> = + = к ^ 2 (1 + 008 J = ^ 39» 6,2 м / с Прогноз ускорения всегда определяется по формуле а = -2 м / с2; ау = -6 м / с2; а =. > / ai + a * = s / 40×6,3 м / с2, ускорение геля n -2coszsinz + 36-2sin2 (i Ускорение при 2 ^ / 16 cos2 / + 36 sin2 2 / — ^ / 3 / 5® — 0,3 м / с. Далее для r = n / 6 с Скорость предопределена Боковая скорость при =, л / 6 с — по формуле х = 4sin / | Координаты движущейся точки при t = n / 6 на / 6 / 6м. y = 3cos2r | / 6 = 1,5 м. Отметьте положение движущейся точки на траектории в соответствии с координатами, выберите масштаб и нарисуйте векторы скорости и ускорения из проекции на ось.
Таким образом, принцип возможного смещения не является в действительности активной силой, и помимо сил реакции идеального соотношения, для которых задача не определена, определяются все силы энергосистемы. Людмила Фирмаль
Для радиальной составляющей скорости в рассматривается направление, противоположное единичному вектору r °. Это потому, что v был найден со знаком минус. Только числовое значение определяется для боковой составляющей скорости. Из рисунка 25 видно, что направление вектора противоположно направлению единичного вектора p ° (направление p ° получается поворотом вектора r ° на 90 ° против часовой стрелки). Следовательно, в рассматриваемом случае вы должны использовать знак минус для vp, то есть c, = -b, 2 м / с.
Для проверки правильности определения vp вы можете использовать следующую формулу «F. Нормальное ускорение всегда направлено внутрь вогнутой поверхности дорожки. Оказывается, что направление тангенциального ускорения а определяется а и направлено вдоль вектора скорости. В результате точка в определенной точке ускоряется. Определить радиус кривизны орбиты в момент времени t = 1/6 с. Все необходимые для этого количества уже доступны. получить = — = 39/5 «7,8
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Кинематическое уравнение равномерного движения по окружности в полярных координатах
Кинематическое уравнение движения с постоянным ускорением
r = r0 + v0 t + at2/2, где v0 скорость объекта в момент t0
Уравнение для скорости тела при движении с постоянным ускорением
Кинематическое уравнение равномерного движения по окружности в полярных координатах
Кинематическое уравнение гармонических колебаний вдоль оси X
х = А Cos (ω t + φ0)
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением
Средняя скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден:
Мгновенной скоростью называется предел отношения перемещения к интервалу времени, в течение которого это перемещение произошло, если интервал времени стремится к нулю.
Vмгн=lim(t->0) ΔS/Δt
2. Ускорение при криволинейном движении присутствует всегда, даже если модуль скорости не изменяется, а изменяется только направление скорости. Изменение величины скорости за единицу времени – это тангенциальное ускорение:
 или
или 
Тангенциальное ускорение в данной точке траектории по направлению совпадает с направлением скорости движения тела или противоположно ему. 
Нормальное ускорение направлено по радиусу кривизны траектории (к оси вращения). Нормальное ускорение перпендикулярно направлению скорости. 
3. Вращательное движение тела вокруг неподвижной направленной оси — движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой хх, называемой осью вращения. Угловое перемещение — векторная величина, характеризующая изменение угловой координаты в процессе её движения. Угловая скорость — векторная величина, характеризующая быстроту вращения материальной точки. Вектор направлен вдоль оси вращения таким образом, чтобы, смотря с его конца, вращение казалось происходящим против часовой стрелки. Угловая скорость (ед. измерения — радиан в секунду рад/с) равна первой производной от угла-поворота радиуса-вектора по времени. Формула угловой скорости: w=df/dt. Угловое ускорение — векторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела Угловое ускорение равно первой производной от угловой скорости по времени. Формула угловой скорости:  Единица углового ускорения — рад в секунду в квадрате.
Единица углового ускорения — рад в секунду в квадрате.
4. Работа переменной силы А=Fs; Графически A=Интеграл(a, b)F(s)dx. Потенциальная энергия силы тяжести Wп=mgh. Работа сила тяжести равна изменению потенциальной энергии, взятому с противоположным знаком. Т.е., если потенциальная энергия увеличивается (тело поднимается), то сила тяжести совершает отрицательную работу и наоборот. A=-mgh
5. Направив координатную ось вдоль прямой движения, можно рассматривать F, s, υ и a как алгебраические величины (положительные или отрицательные в зависимости от направления соответствующего вектора). Тогда работу силы можно записать как A = Fs. При равноускоренном движении перемещение s выражается формулой
 |
Отсюда следует, что
 |
Это выражение показывает, что работа, совершенная силой (или равнодействующей всех сил), связана с изменением квадрата скорости (а не самой скорости).
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела:
|

6. Механическая система (система материальных точек) — это совокупность конечного числа материальных точек, выделенных для рассмотрения.
Внутренние силы — это силы, с которыми точки системы действуют друг на друга.
Внешние силы — это силы, источники которых лежат вне системы, т.е. это силы, действующие со стороны тел, не принадлежащих системе. Центр инерции, геометрическая точка, положение которой характеризует распределение масс в теле или механической системе.
Центр масс механической системы движется как материальная точка с массой равной массе всей системы, под действием всех приложенных к точкам системы внешних сил.
7. Импульс (Количество движения) — векторная физическая величина, являющаяся мерой механического движения тела. В классической механике импульс тела равен произведению массы m этого тела на его скорость v, направление импульса совпадает с направлением вектора скорости:
 .
.
Обозначим скорости тел массами m1 и m2 до взаимодействия через  и
и  , а после взаимодействия — через
, а после взаимодействия — через  и
и  .
.
По третьему закону Ньютона силы, действующие на тела при их взаимодействии, равны по модулю и противоположны по направлению; поэтому их можно обозначить  и
и  .
.
Для изменений импульсов тел при их взаимодействии на основании равенства (16.2) можно записать
 ,
,
 ,
,
где t — время взаимодействия тел. Из этих выражений получаем
 . (16.3)
. (16.3)
Таким образом, векторная сумма импульсов двух тел до взаимодействия равна векторной сумме их импульсов после взаимодействия.
8. (ИСО) — система отсчёта, в которой справедлив первый закон Ньютона
1 закон Ньютона: В инерциальной системе отсчета тело, на которое не действуют другие тела, или, когда действие всех сил скомпенсировано, движется равномерно и прямолинейно или покоится.
2 закон Ньютона: Ускорение тела пропорционально результирующей силе, дейсвующей на тело, и обратно пропорционально массе тела а=F/m
3 закон Ньютона: Тела действуют друг на друга с силами, равными по модулю и противоположными по направлению. F12=-F21
9. Консервативные — такие силы, РАБОТА которых не зависит от траектории, а определяются только начальным и конечным положением материальной точки. Силы, не обладающие только что названным свойством, называют неконсервативными. Для того чтобы узнать, консервативна сила либо нет, надо вычислить ее работу. Потенциальная энергия может быть введена только для поля консервативных сил.Так как их работа не зависит от траектории, а только от начального и конечного положений материальной точки, то эту работу можно записать в виде разности двух чисел: одно — Wn1 — будет зависеть от начального положения тела, второе — Wn2 — от конечного положения тела. Wn1 — потенциальная энергия тела в положении 1; Wn2 — в положении 2.
10. Сила упругости пропорциональна деформации: Fх упр= -kx, где Fxупр — проекция силы упругости на ось х; k — коэффициент упругости (для пружины — жесткость), (На всякий случай, знак минус указывает, что Fx упр направлена в сторону, противоположную деформации х.По третьему закону Ньютона, деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е. Fx=-Fx упр=kx)
Элементарная работа dA, совершаемая силой Fxпри бесконечно малой деформации dx, равна dA = Fx dx = kxdx, а полная работа  идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела П=kx 2 /2.
идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела П=kx 2 /2.
11. Момент силы — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело. (ниже хз что за чушь)
Если под действием приложенной силы твердое тело может совершать вращение вокруг некоторой точки, то для того, чтобы охарактеризовать вращательный эффект силы вводится понятие – момент силы относительно точки (или центра).Моментом силы относительно точки (рисунок 1.1) называется векторное произведение радиус-вектора точки приложения силы на вектор силы. Mo(F) = r ⊗ F . Вектор момента направлен перпендикулярно плоскости, в которой лежат сила и точка, в ту сторону, откуда поворот от действия силы виден происходящим против хода часовой стрелки. Вектор момента характеризует положение плоскости и направление вращательного действия силы, а также дает меру этого действия
 |Mo(F)| = F⋅r⋅sinα = F⋅h,. (. F — с вектором.) где h – плечо силы (кратчайшее расстояние от точки O – центра момента – до линии действия силы). Если сила проходит через точку, то ее момент относительно этой точки равен нулю.Момент силы относительно точки не меняется от переноса силы вдоль линии ее действия. Если силы расположены в одной плоскости, то используется понятие алгебраического момента силы.
|Mo(F)| = F⋅r⋅sinα = F⋅h,. (. F — с вектором.) где h – плечо силы (кратчайшее расстояние от точки O – центра момента – до линии действия силы). Если сила проходит через точку, то ее момент относительно этой точки равен нулю.Момент силы относительно точки не меняется от переноса силы вдоль линии ее действия. Если силы расположены в одной плоскости, то используется понятие алгебраического момента силы.
12. Связь вектора момента силы и момента импульса
Продифференцируем (10) по времени:

Т.к. полюс неподвижен, то первое слагаемое равно нулю (т.к. первая производная перемещения по времени равна скорости). Тогда  коллинеарны, а произведение коллинеарных векторов равно нулю.
коллинеарны, а произведение коллинеарных векторов равно нулю.
Поэтому 
Согласно II закону Ньютона  ,
,
значит (15) будет иметь вид:

или 
Выражение (17) устанавливает связь между  и
и  .
.
| связь между и | — производная вектора момента импульса по времени относительно неподвижного полюса равна вектору момента силы, действующей на эту м.т. относительно того же полюса |
13. (тоже хз что за чушь)  ,
,  векторное произведение. Mz — момент силы Ft относительно оси вращения z. При повороте тела на малый угол вокруг оси Z совершается работа
векторное произведение. Mz — момент силы Ft относительно оси вращения z. При повороте тела на малый угол вокруг оси Z совершается работа 

14. Закон сохранения механической энергии
Если тела, составляющие замкнутую механическую систему, взаимодействуют между собой только посредством сил тяготения и упругости, то работа этих сил равна изменению потенциальной энергии тел, взятому с противоположным знаком:
По теореме о кинетической энергии эта работа равна изменению кинетической энергии:


Или Ek1 + Ep1 = Ek2 + Ep2.
15. Момент импульса характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Момент импульса замкнутой системы сохраняется.
Момент импульса  частицы относительно некоторого начала отсчёта определяется векторным произведением ее радиус-вектора и импульса:
частицы относительно некоторого начала отсчёта определяется векторным произведением ее радиус-вектора и импульса:
 где
где  — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчета начала отсчёта,
— радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчета начала отсчёта,  — импульс частицы. В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с.
— импульс частицы. В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с.
Моментом импульса вращающегося тела называют физическую величину, равную произведению момента инерции тела I на угловую скорость ω его вращения. Момент импульса обозначается буквой L:
Поскольку  уравнение вращательного движения можно представить в виде:
уравнение вращательного движения можно представить в виде:

Окончательно будем иметь:

Это уравнение, полученное здесь для случая, когда I = const, справедливо и в общем случае, когда момент инерции тела изменяется в процессе движения.
Если суммарный момент M внешних сил, действующих на тело, равен нулю, то момент импульса L = Iω относительно данной оси сохраняется:
ΔL = 0, если M = 0.
Закон сохранения момента импульса:  = (
= (  +
+  )ω
)ω

17. Момент инерции механической системы относительно неподвижной оси a («осевой момент инерции») — физическая величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:

где:  — масса i-й точки,
— масса i-й точки,  — расстояние от i-й точки до оси.
— расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси a подобно тому, как масса тела является мерой его инертности в поступательном движении.
Полярная система координат (полярные координаты)
Полярная система координат на плоскости — это совокупность точки , называемой полюсом , и полупрямой , называемой полярной осью . Кроме того, задается масштабный отрезок для измерения расстояний от точек плоскости до полюса. Как правило, на полярной оси выбирается вектор , приложенный к точке , длина которого принимается за величину масштабного отрезка, а направление вектора задает положительное направление на полярной оси (рис.2.28,а).
Положение точки в полярной системе координат определяется расстоянием ( полярным радиусом ) от точки до полюса (т.е. ) и углом ( полярным углом ) между полярной осью и вектором . Полярный радиус и полярный угол составляют полярные координаты точки , что записывается в виде . Полярный угол измеряется в радианах и отсчитывается от полярной оси:
— в положительном направлении (против направления движения часовой стрелки), если значение угла положительное;
— в отрицательном направлении (по направлению движения часовой стрелки), если значение угла отрицательное.
Полярный радиус определен для любой точки плоскости и принимает неотрицательные значения . Полярный угол определен для любой точки плоскости, за исключением полюса , и принимает значения , называемыми главными значениями полярного угла . В некоторых случаях целесообразно считать, что полярный угол определен с точностью до слагаемых , где . В этом случае значениям полярного угла для всех соответствует одно и то же направление радиус-вектора.
С полярной системой координат можно связать прямоугольную систему координат , начало которой совпадает с полюсом, а ось абсцисс (точнее положительная полуось абсцисс) — с полярной осью. Ось ординат достраивается перпендикулярно оси абсцисс так, чтобы получилась правая прямоугольная система координат (рис.2.28,б). Длины базисных векторов определяются масштабным отрезком на полярной оси.
Наоборот, если на плоскости задана правая прямоугольная система координат, то, приняв положительную полуось абсцисс за полярную ось, получим полярную систему координат <связанную с данной прямоугольной).
Выведем формулы, связывающие между собой прямоугольные координаты точки , отличной от точки , и ее полярные координаты . По рис.2.28,б получаем
Эти формулы позволяют найти прямоугольные координаты по известным полярным координатам. Обратный переход выполняется по формулам:
Последние два равенства определяют полярный угол с точностью до слагаемых , где . При из них следует, что . Главное значение полярного угла находится по формулам (рис.2.29):
Пример 2.9. В полярной системе координат :
а) изобразить координатные линии ;
б) изобразить точки с полярными координатами . Найти главные значения полярных углов этих точек;
в) найти прямоугольные координаты точек .
Решение. а) Координатные линии представляют собой окружности соответствующих радиусов, а линии и — полупрямые (рис.2.30,а).
б) Построим точки и (рис.2.30,б,в). Их координаты отличаются полярным углом, однако, имеют одно и то же главное значение . Следовательно, это одна и та же точка, которая совпадает с точкой , изображенной на рис.2.30,а.
в) Учитывая пункт «б», найдем прямоугольные координаты точки . По формулам (2.17) получаем:
1. Главное значение полярного угла можно выбрать иначе, например, .
2. Расстояние между двумя точками и (длина отрезка ) вычисляется по формуле
что следует из теоремы косинусов (рис.2.31).
3. Ориентированная площадь параллелограмма (рис.2.31), построенного на радиус-векторах и , находится по формуле
Она положительна, если (при этом ориентация пары радиус- векторов и правая), и отрицательна, если \varphi_2″ png;base64,iVBORw0KGgoAAAANSUhEUgAAAEcAAAASBAMAAAD73d5oAAAAMFBMVEVHcEwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAlTPQ5AAAAEHRSTlMAwPxBoV0BgTEhELHR4JFxAbyQhgAAASJJREFUKM9jYCAdsEYRoyqmCqvwUgYGa1E4jy3mJczQCQzLRRZAOY8ZWBUPTUCoCvSEMGYzcJ0VcoCwOQUY1jZwFyAZbegBppwZ+Bw41CBC/AFALjuyIgZrCZCJxxgmMjBAFTFO4NrAwGLAwIlQNAWkiNkB6BCgNcYgZzE2sAYw9CSYX0cYJJwAVsQmwMAdsO7LDSCHbxt3A8dlhpniMIdDncSlwbGB7SHDbwZHEOdskalTAAMDTFEM1HMMnxyda6UYPjEUgThLlJRAeqGK4MHEwHpJ6T6I9gHzvNsY4IpYkQK8yQrkNg4NMEefAaEIGXwCqWFY2ADWrIxD0UGw+yVYQRS7Gg5FYBv4gq3B8QKONzvdSnRFBmA7lRQJJx22NKDLACxqN6Lf3w5xAAAAAElFTkSuQmCC» style=»vertical-align: middle;» /> (ориентация пары радиус-векторов и левая).
Пример 2.10. Даны полярные координаты и точек и (рис.2.32). Требуется найти:
а) скалярное произведение ;
б) длину отрезка ;
в) внешнее произведение ;
г) площадь треугольника ;
д) координаты середины отрезка в прямоугольной системе координат, связанной с данной полярной.
Решение. а) По определению скалярного произведения находим
б) Находим длину отрезка (см. пункт 2 замечаний 2.8):
в) Внешнее произведение находим как ориентированную площадь параллелограмма, построенного на векторах и :
Площадь положительная, так как векторы и образуют правую пару .
г) Площадь треугольника находим как половину площади параллелограмма, построенного на радиус-векторах и .
д) По формулам (2.17) находим прямоугольные координаты точек и :
а затем координаты середины отрезка (см. пункт 3 замечаний 2.1):
Пример 2.11. На координатной плоскости отмечена точка . Найти:
а) полярные координаты точки , образа точки при повороте радиус-вектора на угол вокруг начала координат (рис.2.33);
б) полярные координаты точки , образа точки при инверсии плоскости относительно окружности единичного радиуса с центром в начале координат (см. пример б преобразований плоскости в разд. 2.2.4).
Решение. а) Найдем полярные координаты точки . По формулам (2.17), учитывая рис.2.29, получаем:
так как точка лежит в четверти.
При повороте радиус-вектора вокруг полюса на угол полярный радиус не изменяется, а полярный угол увеличивается. Следовательно, полярные координаты точки : , , причем — главное значение полярного угла .
б) При инверсии относительно окружности радиуса полярные координаты образа выражаются через полярные координаты прообраза следующими формулами:
Поэтому, учитывая пункт «а», находим (для ):
http://mydocx.ru/9-109115.html
http://mathhelpplanet.com/static.php?p=polyarnye-koordinaty