Уравнения электрического равновесия для электрических машин
В процессе работы двигателя его якорь вращается в магнитном поле, при этом в обмотке якоря наводится ЭДС, которая направлена против рабочего тока якоря, поэтому её называют противо ЭДС
В соответствии со вторым законом Кирхгофа электрическое равновесие выглядит следующим образом:

 — подводимое напряжение;
— подводимое напряжение;
 — противо ЭДС;
— противо ЭДС;
 — ток протекающий по якорю;
— ток протекающий по якорю;
 — сопротивление обмотки якоря.
— сопротивление обмотки якоря.
Из второго закона Кирхгофа следует, что подведенное к двигателю напряжение уравновешивается противо ЭДС обмотки якоря и падением напряжения в цепи якоря.
 (1)
(1)
Из формулы (1) видим что ток якоря увеличивается при увеличении питающего напряжения и уменьшения противо ЭДС.
 (2)
(2)
Значение противо ЭДС изменяется прямопропорционально изменению величин конструктивной постоянной машины, магнитного потока полюсов и частоты вращения якоря двигателя.
 (3)
(3)
Согласно формулы (3) при трогании с места противо ЭДС Е=0, так как частота вращения якоря двигателя тоже равна нулю n=0 и по этому ток якоря Iя имеет наибольшее значение.
При увеличении скорости движения увеличивается частота вращения якоря ТЭД, следовательно увеличивается значение противо ЭДС, что вызывает уменьшение числителя в формуле (2), т.е. уменьшается ток якоря.
Подставляем значения формулы (3) в Формулу (1) и получаем что:
 (4)
(4)
Из формулы (4) определяем значение частоты вращения якоря ТЭД:
 (5)
(5)
Из формулы (5) видно, что частота вращения якоря двигателя n увеличивается при увеличении подводимого напряжения U, а так же уменьшении магнитного потока  и сопротивления в цепи якоря R.
и сопротивления в цепи якоря R.
Дата добавления: 2017-06-13 ; просмотров: 2876 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Основные теоретические положения
Важное свойство ДПТ с независимым возбуждением от постоянных магнитов состоит в том, что результирующий момент сил от всех проводников якоря, называемый электромагнитным моментом двигателя M, пропорционален току якоря Iя, потребляемому двигателем от источника питания:
 ,
,
где k m — коэффициент пропорциональности, называемый постоянной момента двигателя. Его размерность [Нм/А]. По законам электромагнитной индукции в проводнике, движущемся в магнитном поле, возникает электродвижущая сила. Суммарная ЭДС катушек якоря E через коллектор и щетки прикладывается к внешним выводам двигателя. В двигательном режиме работы эта ЭДС направлена против внешнего напряжения U я, подведенного к якорю от источника питания. Поэтому ЭДС двигателя часто называется противоЭДС. Она прямо пропорциональна угловой скорости вращения вала двигателя w дв[рад/с]:
 ,
,
где k ω — коэффициент пропорциональности, называемый постоянной ЭДС двигателя. Его размерность [Вс/рад].
Природа электромагнитных явлений в ДПТ такова, что если используется система единиц СИ, то значения коэффициентов k ω и km численно равны.
Уравнения, описывающие электрические процессы в ДПТ
В электрической якорной цепи двигателя протекает ток I я под действием напряжения постоянного тока Ua источника питания и противоЭДС двигателя.
 Рис. 1
Рис. 1
Эта цепь характеризуется параметрами: активным сопротивлением R я [Ом] и индуктивностью L я [Гн] якорной обмотки. Вращающийся ротор, обладающий моментом инерции Ja [Нм с 2 /рад] , приводится в движение одновременным действием электромагнитного момента двигателя M дв и момента внешних сил M вн, приложенного к валу двигателя.
Исходные дифференциальные уравнения ДПТ составляются на основании законов физики. Для электрической цепи используется второй закон Кирхгофа, согласно которому можно записать уравнение
 ,
,
где член R я I я характеризует падение напряжения на активном сопротивлении якорной цепи в соответствии с законом Ома, а член L я ( dI я/ dt ) отражает наличие ЭДС самоиндукции, возникающей в обмотке при изменении тока якоря. В представленном уравнении не учитывается падение напряжения на щетках, зависящее нелинейно от тока якоря, но имеющее, как правило, относительно небольшое значение по сравнению с напряжением U я .
Дифференциальное уравнение, характеризующее процессы в механической части двигателя, составляется на основании второго закона Ньютона:
 ,
,
где M вн — момент внешних сил, действующий относительно оси вращения вала двигателя. В этом уравнении не учитывается действие сил трения, возникающих при вращении ротора, но оказывающих относительно слабое действие на ускорение вала ДПТ.
Используя вышеприведенные формулы и приводя дифференциальные уравнения к нормальной форме Коши, получим описание ДПТ в форме:
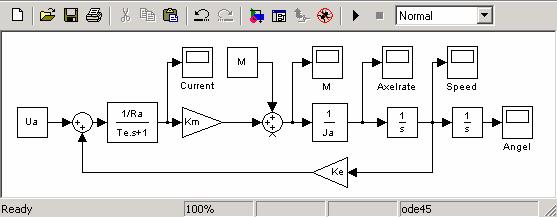
Для исследования процессов с помощью ЭВМ удобно использовать структурное представление математической модели ДПТ. Для этого преобразуем полученную систему линейных дифференциальных уравнений по Лапласу при нулевых начальных условиях. В результате получим систему алгебраических уравнений:
в которых s — переменная Лапласа, а величины I я( s ), w дв( s ), U я( s ), M вн( s ) — изображения по Лапласу переменных I я , w дв, U я, M вн соответственно. После эквивалентных преобразований эти уравнения могут быть представлены в форме:
где Тэ = L я / R я — электромагнитная постоянная времени якорной цепи двигателя.
По уравнениям с помощью системы SIMULINK может быть сформирована структурная схема ДПТ для его математического моделирования (рис.1).
Важным параметром ДПТ, определяющим его динамические свойства, является электромеханическая постоянная времени двигателя:
 .
.
Зависимость между электромагнитным моментом двигателя и частотой вращения ротора в установившемся режиме при постоянных U я и M вн называется механической характеристикой двигателя. Уравнение механической характеристики имеет вид:
 .
.
При пуске двигателя, когда скорость равна нулю, развивается пусковой момент
 .
.
Частота вращения вала двигателя при отсутствии сопротивления называется частотой вращения холостого хода
 .
.
http://electrikam.com/osnovnye-uravneniya-dvigatelya-postoyannogo-toka-dpt/
http://imed.narod.ru/el_mech/motor_dc.htm