Уравнение электрического состояния и векторная диаграмма синхронного двигателя.
Читайте также:
|

 . Ток
. Ток и
и  .
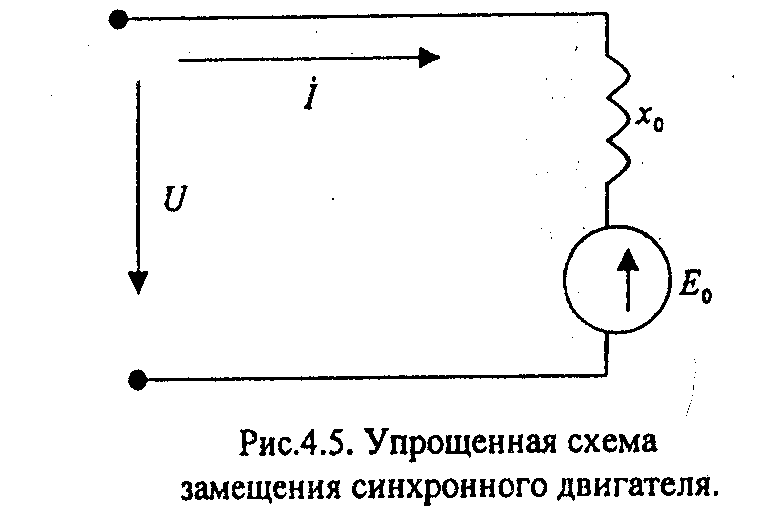
. , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети
уравновешивает напряжение сети  , (4.4)
, (4.4)
 от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС. , где
, где  —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя  .
. ,
, — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв. и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65. остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17). , конец вектора тока
, конец вектора тока , ток
, ток  отстаёт по фазе
отстаёт по фазе  от
от 
 и ток
и ток  является чисто активным.
является чисто активным. и вектор тока
и вектор тока  опережает по фазе вектор напряжения
опережает по фазе вектор напряжения  , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
. (рис.4.17).
(рис.4.17). , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
 с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip. Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).| Название | Синхронные машины 15 общие сведения |
| Анкор | Синхронные машины.doc |
| Дата | 17.01.2018 |
| Размер | 0.83 Mb. |
| Формат файла |  |
| Имя файла | Синхронные машины.doc |
| Тип | Документы #14415 |
| страница | 3 из 7 |
| Подборка по базе: 3.1. Анализаторы. Общие свойства_bd264803092fb1e0227fb3a36d394f, !Общие сведения о ЧС- Емельянов.docx, УЗК общие вопросы 2 уровень.docx, Тема Общие требования к водителю.docx, Самостоятельная работа №3 Опорный конспект Общие сведенья о метр, 2. Электрические машины.docx, Устройство и основные элементы конструкции машины постоянного то, Конструкция машины простоянного тока .docx, 1 лекция — общие вопр 2021 осень (2).pdf, Введение в электрические машины.docx 15.13. УРАВНЕНИЕ ЭЛЕКТРИЧЕСКОГО СОСТОЯНИЯ, СХЕМА ЗАМЕЩЕНИЯ И ВЕКТОРНАЯ ДИАГРАММА ФАЗЫ СИНХРОННОГО ДВИГАТЕЛЯ Из схемы замещения фазы синхронного двигателя следует уравнение электрического состояния фазы синхронного двигателя
где Ėо = jωψo, х = xрас + xя совпадают по своему физическому смыслу с аналогичными понятиями, обсуждавшимися при анализе синхронного генератора (см. § 15.5). У где для синхронного двигателя θ > 0. Преобразуя (15.17) аналогично (15.9) и учитывая, что θ > 0, получим выражение для электромагнитного момента синхронного двигателя, совпадающее с выражением электромагнитного момента синхронного генератора (15.11):
Так как механическая мощность синхронного двигателя равна Рмех = Р = Мэмωр, то, учитывая (15.18), получим:
Напряжение Uи частота f в электрической системе большой мощности являются постоянными величинами. Учитывая это обстоятельство, можно сделать вывод, что значения электромагнитного момента Мэяи мощности Р синхронного двигателя, подключенного к такой системе, при постоянном токе возбуждения Iв = const зависят только от угла 6. Такие зависимости Мьа(б) и Р (0) называются угловыми характеристиками синхронного двигателя и имеют вид, аналогичный угловым характеристикам синхронного генератора (см. рис. 15.10). Угловые характеристики позволяют анализировать процессы, происходящие в синхронном двигателе при изменении нагрузки. При увеличении тормозного момента на валу синхронного двигателя
ротор машины замедляет частоту своего вращения и значения угла θ и электромагнитного момента Мэмначинают возрастать. Равновесие тормозного и электромагнитного моментов восстановится (Mтор2 = Мзм2) через некоторый промежуток времени при новом значении угла θ2> θ1. Для того, чтобы сохранить запас устойчивости π/2 — θ при возросшем тормозном моменте, необходимо увеличить ток возбуждения. всегда постоянны и не зависят от тока возбуждения. На рис. 15.17 приведена совокупность векторных диаграмм фазы синхронного двигателя с постоянным тормозным моментом Mтор = const при различных токах возбуждения Iв = var. При уменшении тока возбуждения Iв (потокосцепления возбуждения 40) угол 8 возрастает до тех пор, пока синхронный двигатель не потеряет устойчивость. Из векторных диаграмм следует, что значение и характер тока статора синхронного двигателя İ = İ а + İ р зависят от тока возбуждения Iв. При токах возбуждення, меньших (больших) некоторого граничного значения
т Реактивная мощность синхронного двигателя Q= 3UIsinφ>, подключенного к системе большой мощности (U = const), при постоянной активной мощности Р регулируется изменением тока возбуждения Iв. При токе возбуждения Iв Iв,гр) реактивная мощность двигателя имеет индуктивный характер Q = 3UIpL(емкостный характер Qc = 3U1 pс). Обычно режим возбуждения синхронного двигателя соответствует емкостной реактивной мощности, что позволяет компенсировать индуктивную реактивную мощность асинхронных двигателей и этим разгрузить электрическую систему от реактивного тока. Практический интерес представляет использование синхронного двигателя в режиме регулируемого емкостного элемента (рис. 15.18, Р = 0) — синхронного компенсатора. Синхронные, компенсаторы позволяют улучшить коэффициент мощности cos φ электрической системы (см. § 2.20). Пуск двигателя в ход состоит из двух этапов: первый этап — асинхронный набор частоты вращения при отсутствии возбуждения постоянным током и второй этап — втягивание в синхронизм после включения постоянного тока возбуждения. Во время первого этапа асинхронного пуска обмотка возбуждения отключается от источника постоянного тока и замыкается на резистор с сопротивлением rпуск (Рис- 15.19), превышающим активное сопротивление обмотки возбуждения в 8—10 раз. Не следует оставлять обмотку возбуждения разомкнутой, так как вращающееся поле может индуктировать в ней весьма значительную ЭДС, опасную для целостности изоляции. Но не целесообразно было бы замыкать эту обмотку накоротко, так как в ней возникает значительный однофазный ток, который будет тормозить ротор по достижении им половины синхронной частоты вращения. В большинстве случаев синхронные двигатели устанавливаются значительной мощности, поэтому для уменьшения пусковых токов часто применяется понижение напряжения при пуске включения двигателя через пусковой автотрансформатор или через индуктивную катушку. Для пуска сначала нужно замкнуть выключатель 2, посредством которого три фазные обмотки автотрансформатора ATсоединяются по схеме звезда. Чтобы подключить к входным зажимам автотрансформатора напряжение сети, следует замкнуть выключатель 1. Таким образом, между выводами обмоток статора синхронного двигателя СД подаются пониженные автотрансформатором линейные напряжения трехфазной системы. Ротор двигателя приходит во вращение, как короткозамкнутый ротор асинхронного двигателя. Когда скольжение ротора будет достаточно мало, следует разомкнуть выключатель 2, благодаря чему напряжение на двигателе несколько повысится, так как теперь лишь часть каждой из фазных обмоток автотрансформатора играет роль индуктивной катушки, включенной последовательно с фазной обмоткой двигателя и несколько ограничивающей своим сопротивлением пусковой ток. Следующая операция пуска заключается во включении двигателя на полное напряжение сети посредством замыкания выключателя 3. Но пока не включен постоянный ток, ротор вращается асинхронно. Пуск заканчивается включением постоянного тока возбуждения посредством переключателя 4. Под действием электромагнитных сил двигатель достигает синхронной частоты вращения и развивает требуемый вращающий момент. При таком пуске не нужны операции по синхронизации двигателя с сетью и операции пуска могут быть автоматизированы. В синхронных двигателях малой мощности роль вращающегося постоянного электромагнита выполняет постоянный магнит, изготовленный из магнитно-твердого материала и укрепленный на оси ротора. В таком двигателе отпадает необходимость в дополнительном источнике постоянного тока. Пуск такого двигателя в ход осуществляется обычно непосредственным подключением его фазных обмоток статора к электрической системе. Для возникновения асинхронного момента при пуске двигателя в парах полюсов постоянного магнита располагаются стержни короткозамкнутой обмотки. Другой разновидностью синхронных двигателей малой мощности являются так называемые синхронные реактивные двигатели. Особенность этих двигателей заключается в том, что их ротор имеет магнитную анизотропию, т. е. различное магнитное сопротивление в различных радиальных направлениях. На рис. 15.20 приведен поперечный разрез конструкции двухполюсного анизотропного ротора, представляющего собой набор пакетов из листовой электротехнической стали, разделенных слоем алюминия’ (заштрихованная часть). При синхронной частоте вращения ротора преимущественное направление легкого намагничивания пакетов листовой электротехнической стали определяет форму магнитных линий поля токов статора. Искривление магнитных линий поля токов статора при наличии тормозного момента на валу двигателя создает уравновешивающий его вращающий момент. Общим недостатком синхронных двигателей малой мощности является отсутствие возможности регулировать его реактивную мощность и запас устойчивости. ЭЛЕКТРОПРИВОД Здесь рассматриваются только общие вопросы, относящиеся к выбору электродвигателя для привода рабочей машины. До появления электропривода первичным двигателем в крупной промышленности была паровая машина, она работала через ременную или канатную передачу на общую трансмиссию, соединенную; ременными передачами с группой станков. Сначала принцип группового привода был сохранен, когда электродвигатель заменил у трансмиссии паровую машину. Но механическая передача от первичного двигателя к станку через трансмиссию, а затем через большее или меньшее число последовательно включенных канатных, ременных, зубчатых и других передач неизбежно связана со значительными потерями энергии в передающих устройствах (часто больше 50 %). Кроме того, подобные устройства занимают много места. Эти недостатки группового привода устраняются при переходе к одиночному приводу, при котором электродвигатель работает только на один станок и соединяется с ним по возможности непосредственно. В СССР примерно к 1930 г. одиночный привод сменил групповой. Это усовершенствование привода было одним из результатов реконструкции промышленности в ходе индустриализации страны (По коэффициенту атектрификации (отношению установленной мощности электродвигателей к общей установленной мощности двигателей всех видов) СССР с 1938 г. стоит на первом месте в мире.) С В качестве примера постепенного приближения электродвигателя к рабочим органам машины-орудия на рис. 16.1 показан схематически переход от группового привода 1 через постепенно совершенствуемый одиночный привод 2—4 к многодвигательному приводу 5 рабочих органов радиально-сверлильного станка. Применение электропривода позволяет также заменить механическое управление работой машины-орудия посредством сцепных муфт, фрикционов, приводных ремней и т. п. электрическим управлением. Этот процесс усовершенствования привода продолжается и в наши дни. Электрическое управление рабочей машиной требует изменения не только ее конструкции, но и эксплуатации. Появляется возможность, быстро выполняя необходимое регулирование, ускорить рабочие циклы, а следовательно, резко повысить темпы работы и производительность машин. Вместе с тем быстрое чередование рабочих операций в ряде случаев делает необходимым освобождение человека от труда по контролю и управлению периодически повторяющимися рабочими циклами машины-орудия. Автоматизация электропривода применяется как в сложных, так и в простых приводах, для управления как многочисленными электродвигателями блюминга (прокатного обжимного стана) общей мощностью порядка нескольких тысяч киловатт, так и простейшим короткозамкнутым асинхронным двигателем мощностью меньше 1 кВт. В последнем случае автоматически производятся лишь простейшие операции — пуск двигателя в ход и его остановка; в других случаях автоматически выполняются весьма сложные производственные процессы — осуществление определенной последовательности операций или работа по шаблону; автоматически действующая защита от перегрузок и повреждений и т. д. Автоматизация необходима для управления мощными механизмами; для сложных приводов, требующих быстрой и частой регулировки частоты вращения двигателей; для привода с частым пуском двигателя в ход (например, у блюминга пуск в ход ряда механизмов повторяется до 2000 раз в час). Автоматические линии машин представляют собой дальнейшее развитие автоматики в промышленном производстве. Это — группа машин, выполняющих последовательно одна за другой цикл операций по обработке изделий, причем эти изделия автоматически перемещаются от одной машины к другой. Рабочий, обслуживающий автоматическую линию, выполняет роль командира группы машин, и, таким образом, в производстве исчезают существенные различия между физическим и умственным трудом, что характерно для будущего коммунистического общества. источники: http://electrono.ru/elektricheskie-mashiny/sinxronnyj-dvigatel http://topuch.ru/sinhronnie-mashini-15-obshie-svedeniya/index3.html |

 равнению электрического состояния (15.16) соответствует векторная диаграмма фазы синхронного двигателя на рис. 15.16. На векторной диаграмме сдвиг фаз θ соответствует геометрическому углу между осью полюсов ротора и осью результирующего магнитного поля синхронного двигателя, деленному на число пар полюсов. Для синхронной машины, работающей в режиме двигателя, значение угла 6 всегда больше нуля (θ > 0).
равнению электрического состояния (15.16) соответствует векторная диаграмма фазы синхронного двигателя на рис. 15.16. На векторной диаграмме сдвиг фаз θ соответствует геометрическому углу между осью полюсов ротора и осью результирующего магнитного поля синхронного двигателя, деленному на число пар полюсов. Для синхронной машины, работающей в режиме двигателя, значение угла 6 всегда больше нуля (θ > 0).






 инхронных двигателей, препятствовавшим их распространению. В настоящее время все эти трудности отпали благодаря применению очень простого асинхронного пуска синхронного двигателя. Чтобы приспособить двигатель к такому пуску при явнополюсном роторе, в полюсные наконечники закладывается пусковая короткозамкнутая обмотка из медных или латунных стержней. Она напоминает беличье колесо асинхронной машины, но занимает лишь часть окружности ротора. В конструкции завода «Электросила» специальной короткозамкнутой обмотки на роторе двигателя нет, а ее роль выполняют сам массивный сердечник ротора и металлические клинья, заложенные в пазы ротора, а также бандажи, не имеющие с сердечником ротора электрического соединения.
инхронных двигателей, препятствовавшим их распространению. В настоящее время все эти трудности отпали благодаря применению очень простого асинхронного пуска синхронного двигателя. Чтобы приспособить двигатель к такому пуску при явнополюсном роторе, в полюсные наконечники закладывается пусковая короткозамкнутая обмотка из медных или латунных стержней. Она напоминает беличье колесо асинхронной машины, но занимает лишь часть окружности ротора. В конструкции завода «Электросила» специальной короткозамкнутой обмотки на роторе двигателя нет, а ее роль выполняют сам массивный сердечник ротора и металлические клинья, заложенные в пазы ротора, а также бандажи, не имеющие с сердечником ротора электрического соединения. войство рассмотренных выше синхронных двигателей сохранять неизменной частоту вращения при изменении тормозного момента на валу достигается усложнением устройства ротора, к обмотке которого подключается через скользящие контакты специальный источник постоянного тока.
войство рассмотренных выше синхронных двигателей сохранять неизменной частоту вращения при изменении тормозного момента на валу достигается усложнением устройства ротора, к обмотке которого подключается через скользящие контакты специальный источник постоянного тока. ледующим шагом в общем усовершенствовании привода явилось уменьшение потерь при передаче энергии внутри самой машины-орудия. При наличии только одного электродвигателя в ряде случаев необходимы специальные устройства (зубчатые и ременные передачи, эксцентрики и т. п.) для передачи энергии внутри рабочей машины. Естественным развитием электропривода было устранение механического звена — переход к многодвигательному приводу одной рабочей машины. В подобном устройстве отдельные рабочие органы машины имеют индивидуальный привод. Применение электродвигателя с изменяемой частотой вращения решает задачу регулирования скорости движения данного рабочего органа машины. Это дает возможность отказаться от соответствующих сложных механических устройств (коробок скоростей и т. п.). Непосредственное соединение электродвигателя с рабочим органом машины делает целесообразным взаимное приспособление того и другого, в результате чего в ряде современных машин электрическое и механическое оборудование настолько объединено, что затруднительно указать границы каждого из них.
ледующим шагом в общем усовершенствовании привода явилось уменьшение потерь при передаче энергии внутри самой машины-орудия. При наличии только одного электродвигателя в ряде случаев необходимы специальные устройства (зубчатые и ременные передачи, эксцентрики и т. п.) для передачи энергии внутри рабочей машины. Естественным развитием электропривода было устранение механического звена — переход к многодвигательному приводу одной рабочей машины. В подобном устройстве отдельные рабочие органы машины имеют индивидуальный привод. Применение электродвигателя с изменяемой частотой вращения решает задачу регулирования скорости движения данного рабочего органа машины. Это дает возможность отказаться от соответствующих сложных механических устройств (коробок скоростей и т. п.). Непосредственное соединение электродвигателя с рабочим органом машины делает целесообразным взаимное приспособление того и другого, в результате чего в ряде современных машин электрическое и механическое оборудование настолько объединено, что затруднительно указать границы каждого из них.