Схема включения и электромеханическая характеристика асинхронного двигателя

Схема включения асинхронного двигателя зависит от конструкции ротора .
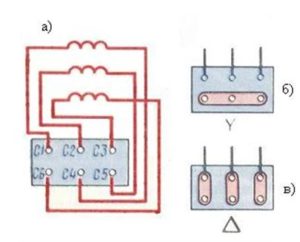
Схема включения асинхронного двигателя: а — с фазным ротором; б — с короткозамкнутым ротором.
Для получения математических выражений электромеханической и механической характеристик асинхронного двигателя используется П-образная схема замещения для одной фазы электродвигателя.
П-образная схема замещения для одной фазы асинхронного двигателя.
Формула электромеханической характеристики асинхронного двигателя:
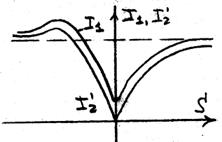
В отличие от ДПТ, у которых электромеханическая характеристика является зависимостью скорости от тока якоря, у асинхронных двигателей электромеханическая характеристика является зависимостью I2’(s).
Электромеханическая характеристика асинхронного двигателя.
Рассмотрим характерные точки электромеханической характеристики:
s1 – скольжение, при котором I2’ достигает максимума.
Точка максимального тока ротора всегда лежит в области отрицательных скольжений.
I2∞’ является асимптотой, к которой стремится ток ротора в областях скольжений, близких к бесконечности.
Электромеханическая характеристика асинхронного двигателя редко используется в электроприводах с асинхронными двигателями для изучения их работы. Обычно при изучении регулировочных свойств электродвигателей используется механическая характеристика.
Электромеханические характеристики асинхронного двигателя.
Для асинхронного двигателя существуют два типа электромеханических характеристик
I1(S) – ток статора от скольжения;
I’2(S) – ток ротора от скольжения.
В выражении для зависимости I’2(S) получают из схемы замещения асинхронного двигателя
 .
.
Из этого уравнения следует, что при S®0 ток I’2 стремится к предельному значению равному
 .
.
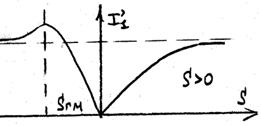
Из графика видно, что при скольжении S>0 функция I’2(S) возрастает монотонно, а при скольжении меньше нуля функция имеет максимум  при скольжении
при скольжении  . Причем функция I’2(S) в генераторном режиме стремится к предельному значению сверху. Если для двигателей малой мощности а»1, то Sгм=-1.
. Причем функция I’2(S) в генераторном режиме стремится к предельному значению сверху. Если для двигателей малой мощности а»1, то Sгм=-1.
Но удобно для асинхронного двигателя пользоваться электромеханической характеристикой, выраженной через параметры Мк, Sк, а как в формуле для момента:
 ;
;  ;
;
 ;
;  (А);
(А);
 ;
;  ;
;  (В).
(В).
 ;
;
 ;
;  ;
;  ;
;  .
.
Из последней формулы можно определить значение предельного тока I’2пред
S®¥  ;
;  ;
;
Sни – скольжение на характеристики, где момент номинальный.
 ;
;  .
.
Предельное значение тока ротора можно выразить через предельное значение следующим образом:
Ток ротора интенсивно растет до критического значения Sк до значения 0,71I’2пр.
Для линейного участка скоростная характеристика выглядит следующим образом:
 .
.
Электромеханическая характеристика I1(S) можно получить, используя векторную диаграмму асинхронного двигателя:
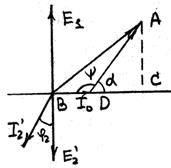
 ;
;
 ;
;  ;
;  ;
; 
 .
.
Дата добавления: 2016-02-09 ; просмотров: 1729 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Механические характеристики асинхронных двигателей
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
Устройство асинхронной машины
Схематичное устройство асинхронной машины
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Механическая характеристика
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
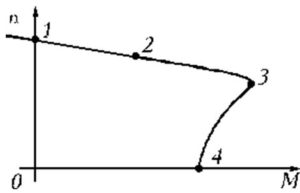 Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:

Ток холостого хода составляет 30—40% от номинального.
Формула расчета при критическом скольжении:

Ток в начальный момент пуска:

Все значения отражают электромеханическую характеристику.
Рабочие характеристики
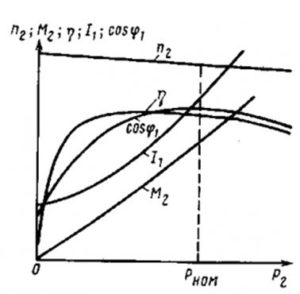 Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
http://helpiks.org/6-84238.html
http://electricvdele.ru/elektrooborudovanie/elektrodvigateli/mehanicheskaya-harakteristika-asinhronnogo-dvigatelya.html