Механические характеристики асинхронных двигателей
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
Устройство асинхронной машины
Схематичное устройство асинхронной машины
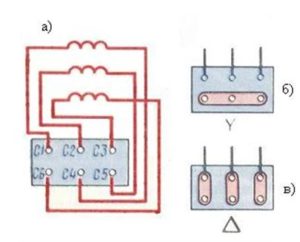
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Механическая характеристика
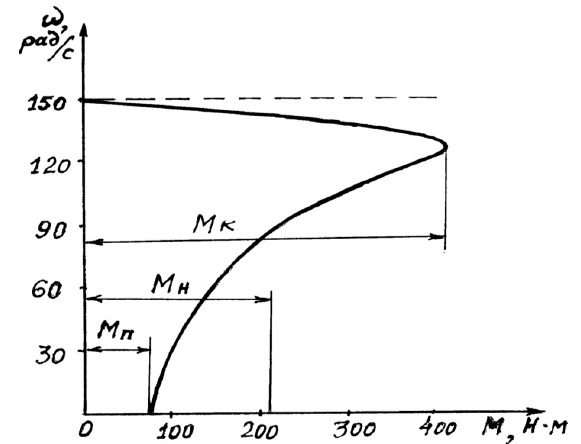
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
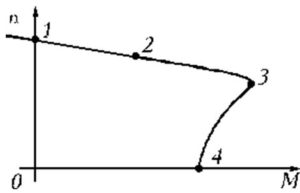 Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:

Ток холостого хода составляет 30—40% от номинального.
Формула расчета при критическом скольжении:

Ток в начальный момент пуска:

Все значения отражают электромеханическую характеристику.
Рабочие характеристики
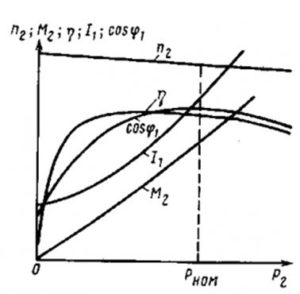 Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
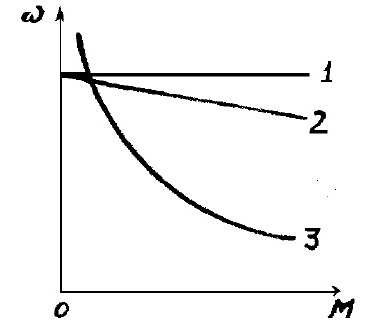
Механические характеристики электродвигателей: 1 — абсолютно жесткая характеристика, 2 — жесткая характеристика, 3 — мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 — 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения — при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду.
Но поскольку двигатель асинхронный, то п оявление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения .
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Расчет и построение механических характеристик асинхронного двигателя
Асинхронные двигатели получили широкое распространение благодаря простоте своей конструкции и высокой надежности.
При подаче на обмотки статора напряжений, сдвинутых по фазе ни 120°, по обмоткам протекают токи, создается круговое вращающее магнитное поле, пересекающее обмотки ротора и наводящее в них ЭДС.
Так как обмотка ротора имеет замкнутую электрическую цепь, в ней под действием ЭДС возникает ток. При взаимодействии роторных токов с вращающимся магнитным полем статора создается вращающий электромагнитный момент на валу электродвигателя. Под действием этого момента ротор вращается и сторону вращающегося магнитного поля статора, причем частота вращения ротора двигателя всегда меньше частоты вращения магнитного поля статора.
Частота вращения магнитного поля находится в строгой зависимости и от частоты f1подводимого напряжения сети и числа пар полюсов pдвигателя:
 (4.1)
(4.1)
где f1 – частота питающей сети;
p — число пар полюсов.
Одним из показателей, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимается отношение
 (4.2)
(4.2)
где n1 — частота вращения магнитного поля статора;
n2 — частота вращения ротора электродвигателя;
w1 – угловая скорость магнитного поля статора;
w2 — угловая скорость ротора электродвигателя.
При выводе уравнения механической характеристики асинхронного двигателя необходимо обратиться к упрощенной схеме замещения (см. рис. 4.1).
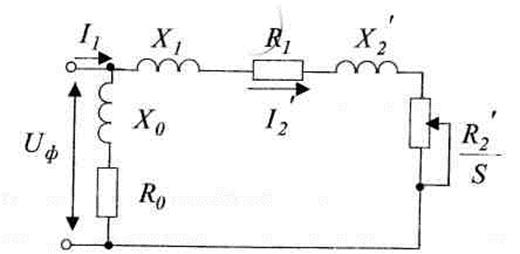
Рисунок 4.1 – Упрощенная схема замещения асинхронного электродвигателя
В соответствии с приведенной схемой находим выражение для приведенного вторичного тока:
 , (4.3)
, (4.3)
где R1, R2 ’ — соответственно первичное и вторичное приведенные активные сопротивления;
R0 , X0 — активное и реактивное сопротивление контура намагничивания;
X1, X2 ’ -первичное и вторичное приведенное сопротивление рассеяния;
S — скольжение двигателя.
Вращающий момент асинхронного двигателя может быть определен из выражения потерь:
 (4.4)
(4.4)
 (4.5)
(4.5)
Подставляя значение I2в (4.5), получаем уравнение механической характеристики асинхронного двигателя:
 (4.6)
(4.6)
Из выражения (4.6) видно, что угловую скорость вращения асинхронного двигателя можно регулировать изменением напряжения на зажимах двигателя, введением добавочного сопротивления в цепь статора или ротора, а если обратиться к выражению (4.1), то становятся очевидными еще два способа регулирования угловой скорости, а именно: изменением числа пар полюсов и изменением частоты питающей сети.
Использование уравнения (4.6) для практических расчетов весьма затруднительно, поэтому в практических расчетах пользуются формулой Клосса:
 (4.7)
(4.7)
или общей формулой
 (4.8)
(4.8)
где Мкр — максимальный (критический) момент двигателя, Н*м;
Sкр — скольжение, соответствующее максимальному моменту;
q — параметр, зависящий от конструктивных особенностей.
Максимальный (критический) момент двигателя Мкр определяется по номинальному моменту двигателя Мн и его перегрузочной способности mк:
 (4.9)
(4.9)
Значение критического скольжения Sкр с достаточной степенью точности может быть определено по соотношению
 , (4.10)
, (4.10)
где Sн — номинальное скольжение;
mк — кратность критического момента.
Параметр q рассчитывается по соотношению
 (4.11)
(4.11)
 (4.12)
(4.12)
где mп — кратность пускового момента.
Характерными точками механической характеристики асинхронного электродвигателя являются:
точка пуска с координатами w = 0; М = Мн;
точка провала на пусковой ветви, угловая скорость, в которой w соответствует скольжению S = 0,8, М = Ммин;
критическая точка с координатами wкр и М = Мкр;
точка холостого хода, в которой w = w1; М = 0 (см. рис. 4.2).
Участок механической характеристики в интервале угловых скоростей от w = w1 до w = wкр называется рабочей частью характеристики. В интервале угловых скоростей от w = wкр до w = 0 находится пусковой участок механической характеристики.
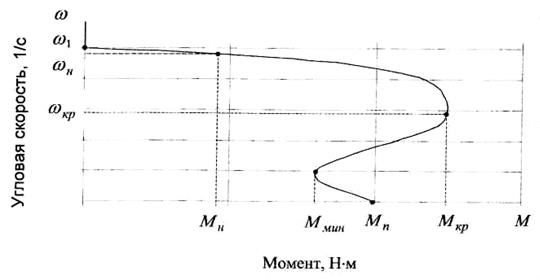
Рисунок 4.2 – Механическая характеристика асинхронного двигателя
 Пример 4
Пример 4
Рассчитать и построить механическую характеристику асинхронного двигателя типа АИР56А2. Паспортные данные: Рн=0,18кВт; nн=2730 об/мин; hн=0,68; cos j = 0,78;  ;
;  .
.
Решение
 об/мин;
об/мин;  ;
;
 ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;
Результаты расчетов механической характеристики по общей формуле Клосса сводим в таблицу 4.1. По полученным данным строим зависимости М=f(w) и М=f(S) (см. рис. 4.3).
Таблица 4.1 – Результаты расчетов механической характеристики асинхронного двигателя типа АИР56А2
| Характерные точки | Холостого хода | Номинальная | Критическая | Пусковая | |||||
| S | 0,05 | 0,09 | 0,2 | 0,37 | 0,4 | 0,5 | 0,6 | 0,8 | 1,0 |
| n, об/мин | |||||||||
| w,с -1 | 299,25 | 286,65 | 198,45 | 157,5 | |||||
| Мдв , Н×м | 0,366 | 0,628 | 1,154 | 1,38 | 1,376 | 1,319 | 1,233 | 1,051 | 0,898 |
|
|
|
Рис. 4.3 – Механические характеристики асинхронного двигателя
Асинхронные электродвигатели с современными способами регулирования скорости вращения не уступают электродвигателям постоянного тока. Основными способами регулирования являются: включение сопротивления в цепь ротора (только для двигателей с фазным ротором); изменение числа пар полюсов или изменение частоты питающего тока, изменение величины подводимого напряжения. Применяют также электромагнитные муфты скольжения.
Регулирование переключением числа пар полюсов применяют для многоскоростных электродвигателей с короткозамкнутым ротором. Недостатком является ступенчатое регулирование скорости.
Дата добавления: 2015-02-25 ; просмотров: 4264 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
http://electrik.info/main/school/1159-harakteristiki-asinhronnyh-elektrodvigateley.html
http://helpiks.org/2-80701.html