Эвольвента окружности, её свойства и уравнение
Эвольвента – это траектория точки прямой линии (производящей прямой), перекатывающейся без скольжения по окружности.
Образование эвольвенты можно представить как траекторию, описываемую остриём карандаша, привязанного к концу нити, сматываемой с катушки, установленной своей осью перпендикулярно плоскости листа бумаги.
Свойства эвольвенты
1) Нормаль к эвольвенте является касательной к основной окружности.
2) Центры кривизны эвольвенты лежат на основной окружности, так что основная окружность представляет собой эволюту, т. е. геометрическое место центров кривизны эвольвенты.
 3) Радиус кривизны эвольвенты в данной точке равен отрезку производящей прямой, заключённому между данной точкой эвольвенты и точкой касания производящей прямой с основной окружностью, ρА = AC. В точке начала эвольвенты её радиус кривизны равен нулю, ρA0 = 0.
3) Радиус кривизны эвольвенты в данной точке равен отрезку производящей прямой, заключённому между данной точкой эвольвенты и точкой касания производящей прямой с основной окружностью, ρА = AC. В точке начала эвольвенты её радиус кривизны равен нулю, ρA0 = 0.
4) Радиус кривизны эвольвенты в данной точке равен дуге основной окружности, заключённой между точкой начала эвольвенты и точкой касания этой прямой с основной окружностью, ρA =  C0C.
C0C.
5) Правая и левая ветви эвольвенты симметричны.
6) Все точки эвольвенты лежат снаружи от основной окружности.
Уравнение эвольвенты
Для получения уравнения эвольвенты обратимся к рис. 3.3. Положение произвольной точки Ay эвольвенты в полярной системе координат определяется двумя координатами относительно её начального радиус-вектора OA0 (или OC0):  длиной радиус-вектора Ry и углом θy. Радиус-вектор Ry определим из прямоугольного треугольника OAyCy:
длиной радиус-вектора Ry и углом θy. Радиус-вектор Ry определим из прямоугольного треугольника OAyCy:

Для определения полярного угла θy сначала выразим длину дуги основной окружности через её радиус и центральный угол:

Выразим теперь противолежащий углу αy катет AyCy в ∆OAyCy:

На основании четвёртого свойства эвольвенты имеем

Подставляя в это равенство соответствующие выражения и решая его относительно θy, получаем
 .
.
В этих математических выражениях и на рис. 3.3 угол αy называется профильным углом эвольвенты. Разность между тангенсом какого-либо угла и самим углом называется эвольвентной функцией и обозначается тремя первыми буквами латинского названия эвольвенты involute, т. е. inv, так что окончательно уравнение имеет вид:
В математических справочниках приводятся таблицы эвольвентной функции, в которых аргумент αy изменяется от нуля до нескольких десятков градусов.
Элементы зубчатого колеса
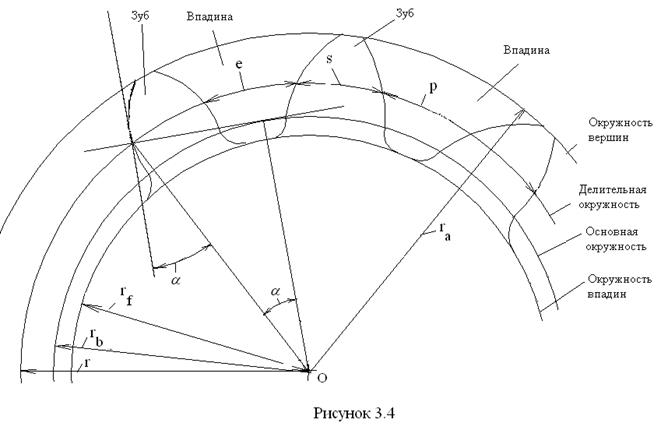
Здесь рассматриваются те элементы колеса, которые относятся к его ободу, где располагаются зубья (рис. 3.4).
Шаг колеса p – это расстояние по делительной окружности между одноимёнными профилями двух соседних зубьев, p = π·m. Шаг включает два параметра – толщину зуба s и ширину впадины e. Если s = e, то имеем колесо с равноделённым шагом, в противном случае имеем колесо с неравноделённым шагом.
Делительная окружность (её радиус  , в зацеплении двух колёс имеет индекс номера колеса):
, в зацеплении двух колёс имеет индекс номера колеса):
– делит зуб на головку и ножку;
– модуль m на этой окружности имеет стандартное значение;
– радиус окружности имеет величину r = 0,5m  ;
;
– в точке на делительной окружности профильный угол эвольвенты αy = 20º и обозначается буквой α без индекса.
Основная окружность является базовой для образования эвольвенты (от неё начинается эвольвентная часть зуба). Радиус этой окружности получается из рассмотрения прямоугольного треугольника с углом при вершине O, равным α, и одним из катетов, равным b, и гипотенузой, равной : b = ·cos α.
Окружность вершин является габаритной окружностью колеса, её радиус определяется формулой
 ,
,
где  – высота головки зуба, причём
– высота головки зуба, причём  . Множитель перед модулем называется коэффициентом высоты головки зуба и равен по величине 1, т. е.
. Множитель перед модулем называется коэффициентом высоты головки зуба и равен по величине 1, т. е.  .
.
Диаметр окружности вершин является диаметром заготовки для изготовления зубчатого колеса.
Окружность впадин ограничивает зуб у основания, её радиус равен
 ,
,
 где
где  – высота ножки зуба, определяемая равенством
– высота ножки зуба, определяемая равенством  , второе слагаемое в скобках называется коэффициентом радиального зазора и имеет величину
, второе слагаемое в скобках называется коэффициентом радиального зазора и имеет величину  .
.
Контур зуба от основной окружности до окружности вершин очерчен эвольвентой, которая сопрягается с окружностью впадин переходной кривой (эквидистантой удлинённой эвольвенты).
iSopromat.ru

Эвольвентное зацепление зубчатых колес удовлетворяет основному закону зацепления, обеспечивает постоянство передаточного отношения, допускает отклонение межосевого расстояния зубчатых передач и точно стандартизируется.
Подавляющее большинство зубчатых передач, применяемых в технике, имеет зубчатые колеса с эвольвентным профилем.
Эвольвента как кривая для формирования профиля зуба была предложена Л. Эйлером. Она обладает значительными преимуществами перед другими кривыми, применяемыми для этой цели, – удовлетворяет основному закону зацепления, обеспечивает постоянство передаточного отношения, нечувствительна к неточностям межосевого расстояния (что облегчает сборку), наиболее проста и технологична в изготовлении, легко стандартизируется (что особенно важно для такого распространенного вида механизмов как зубчатые передачи).
На следующем видео показан пример эвольвентного зацепления зубчатых колес

Эвольвента – это траектория движения точки, принадлежащей прямой, перекатывающейся без скольжения по окружности. Данная прямая называется производящей прямой, а окружность, по которой она перекатывается – основной окружностью (рисунок 38 а).
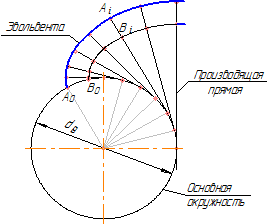
Эвольвента обладает следующими свойствами, которые используются в теории зацепления:
- форма эвольвенты определяется радиусом основной окружности;
- нормаль к эвольвенте в любой ее точке является касательной к основной окружности. Точка касания нормали с основной окружностью является центром кривизны эвольвенты в рассматриваемой точке;
- эвольвенты одной и той же основной окружности являются эквидистантными (равноотстоящими друг от друга) кривыми.
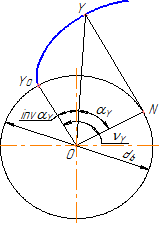
Положение любой точки на эвольвенте может быть однозначно охарактеризовано диаметром окружности, на которой она расположена, а также характерными для эвольвенты углами: углом развернутости (обозначается ν ), углом профиля ( α ), эвольвентным углом – inv α (рисунок 38 б). На рисунке 38 б показаны эти углы для произвольно выбранной на эвольвенте точки Y, поэтому они имеют соответствующий индекс:
- ν Y – угол развернутости эвольвенты до точки у;
- α Y – угол профиля в точке Y;
- inv α Y – эвольвентный угол в точке Y (на окружности диаметра dY ).
То есть индекс показывает, на какой окружности находится рассматриваемая точка эвольвенты, поэтому для характерных окружностей используются индексы, приведенные выше.
Например: α a1 – угол профиля эвольвенты в точке, лежащей на окружности вершин первого колеса;
inv α – эвольвентный угол в точке эвольвенты, находящейся на делительной окружности колеса и т.д.
Рассмотрим свойства эвольвенты. Первое свойство имеет строгое математическое доказательство, однако в рамках данного короткого курса оно не приводится.
Так как при формировании эвольвенты производящая прямая перекатывается по основной окружности без скольжения, то в данный момент времени она вращается вокруг точки N (N – мгновенный центр скоростей), описывая бесконечно малую дугу окружности, которая и определяет кривизну эвольвенты в данной точке. Т.е. отрезок NY – это радиус кривизны эвольвенты в точке Y (NY= ρ Y).
Но отрезок NY в точности равен дуге NY0 (это та же дуга только вытянутая в прямую линию). Таким образом, имеем:
Чем больше радиус основной окружности, тем больше радиус кривизны эвольвенты в любой ее точке (то есть форма эвольвенты действительно определяется величиной радиуса основной окружности).
Второе свойство также легко просматривается. Так как N – мгновенный центр скоростей, то скорость точки Y перпендикулярна радиусу NY. Но скорость точки, движущейся по криволинейной траектории, направлена по касательной к этой траектории – в данном случае по касательной к эвольвенте в точке Y.
Перпендикуляр к касательной – есть нормаль, поэтому прямая YN с одной стороны является нормалью к эвольвенте в точке Y, с другой стороны является касательной к основной окружности (как производящая прямая, перекатывающаяся по основной окружности).
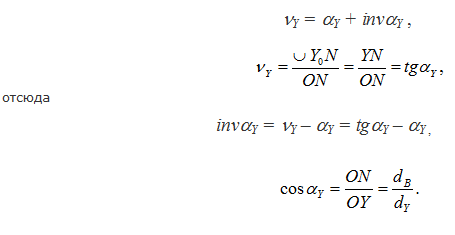
То, что точка N является центром кривизны эвольвенты в точке Y, показано при рассмотрении первого свойства. Запишем некоторые зависимости, которые используются в дальнейшем при изучении геометрии эвольвентного зацепления (получаются из рассмотрения рисунка 38 б):
Третье свойство эвольвенты очевидно из рисунка 38а. Действительно, если на производящей прямой взять две точки (А и В), то они будут описывать две совершенно одинаковых эвольвенты, причем, как бы не перемещалась производящая прямая, расстояние между этими точками не изменяется (AiBi = Const). Т.е. действительно это эквидистантные (равноотстоящие друг от друга) кривые. Но, самое важное, что это расстояние AiBi равно расстоянию между этими эвольвентами, измеренному по дуге основной окружности:
Признаком того, что два криволинейных профиля касаются (а не пересекаются), является наличие у них в точке контакта общей нормали. В связи с этим контакт двух эвольвентных профилей происходит на общей касательной к основным окружностям N1N2 (рисунок 39), которая одновременно будет являться общей нормалью к этим профилям в точке их касания в любой момент времени (на основании второго свойства эвольвенты).
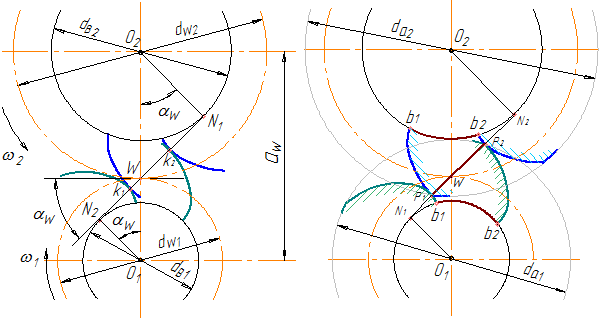
Геометрическое место точек контакта профилей, которое они занимают в процессе работы пары зубьев, называется линией зацепления. Таким образом, в эвольвентной передаче линией зацепления является прямая N1N2 (общая касательная к основным окружностям).
На рисунке 39 а показано зацепление двух эвольвентных профилей в разные моменты времени. В обоих положениях прямая N1N2 является общей нормалью к этим касающимся профилям и проходит через полюс зацепления W (мгновенный центр относительного вращения).
Это, с одной стороны показывает, что эвольвентные профили удовлетворяют основному закону зацепления, с другой стороны обеспечивают постоянство передаточного отношения, т.к. полюс зацепления не меняет своего положения в процессе работы пары (отношение O2W/O1W остается постянным).
С изменением межосевого расстояния будет меняться только положение линии зацепления, но вся картина зацепления останется такой же, т.е. по-прежнему будет сохраняться основной закон зацепления, величина и постоянство передаточного отношения. Это очень важное свойство эвольвентного зацепления, т.к. позволяет вписывать передачу в разные межосевые расстояния, что особенно важно при проектировании коробок скоростей, планетарных и дифференциальных механизмов.
Передача оказывается малочувствительной к неточностям межосевого расстояния, что позволяет снизить требования к точности сборки.
Угол между линией зацепления и общей касательной к начальным окружностям в полюсе называется углом зацепления. Угол зацепления, угол профиля на начальной окружности первого колеса и угол профиля на начальной окружности второго колеса равны между собой (αw1=αw2=αw) , поэтому все они обозначаются одинаково – αw (без числового индекса – см. рисунок 39 а).
Отрезок N1N2 называется теоретической линией зацепления. На этом участке происходит нормальная работа двух неограниченных эвольвент.
В реальной передаче эвольвенты ограничены («обрезаны») окружностями вершин, поэтому вся работа пары происходит на участке линии зацепления P1P2, заключенном между окружностями вершин (рисунок 39б).
Отрезок P1P2 называется рабочей (активной) частью линии зацепления (иногда называют просто «рабочая линия зацепления», или «активная линия зацепления»). На рисунке 39б показано два положения одной и той же пары: в начале зацепления (зуб ведомого колеса работает своей вершиной, зуб ведущего колеса – нижней рабочей точкой профиля Р1), и в конце зацепления (зуб ведущего колеса работает своей вершиной и в следующий момент выйдет из зацепления, зуб ведомого колеса работает своей нижней рабочей точкой профиля Р2).
Примечание: здесь термин «нижняя» или «верхняя» точка относится к положению точек относительно основной окружности, независимо от того, как эти точки располагаются одна относительно другой в пространстве. Из двух рассматриваемых точек профиля «нижней» будет та, которая располагается ближе к основной окружности.
При увеличении радиуса основной окружности до бесконечности радиус кривизны эвольвенты в любой ее точке также становится бесконечно большим, т.е. основная окружность и эвольвента превращаются в прямые линии. Эвольвентное зубчатое колесо превращается в зубчатую рейку с прямолинейным профилем зуба.
Таким образом, рейка с прямолинейным профилем зуба представляет собой частный случай эвольвентного зубчатого колеса и обладает всеми его свойствами, т.е. может работать с любым эвольвентным колесом (при одном и том же модуле) без нарушения основного закона зацепления. При этом вращательное движение колеса преобразуется в поступательное движение рейки или поступательное движение рейки преобразуется во вращательное движение колеса с соблюдением постоянства передаточного отношения.
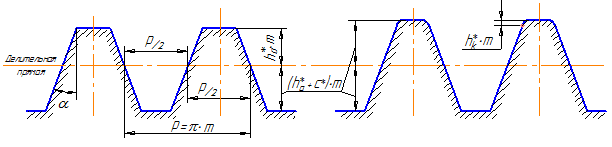
Т.к. зубчатая рейка с прямолинейным профилем зуба с одной стороны имеет простые формы и легко задать размеры ее элементов, с другой стороны представляет собой эвольвентное зубчатое колесо, то ее параметры положены в основу стандартизации эвольвентных зубчатых колес. Стандартная зубчатая рейка называется исходным контуром (рисунок 40а).
Имеется несколько стандартов на исходные контуры, учитывающие специфику некоторых видов передач (мелкомодульных, конических и т.д.). В основном используются параметры, определенные ГОСТ 13 755 – 81.
В соответствии с этим стандартом исходный контур имеет следующие параметры:
- α = 20 0 – угол профиля исходного контура (основной параметр, определяющий ряд эвольвент, используемых для зубчатых передач в соответствии с этим стандартом, поэтому часто в конструкторской практике говорят, что у нас в стране используется «двадцатиградусная» эвольвента);
- ha * = 1 – коэффициент высоты головки зуба;
- c*= 0,25 – коэффициент радиального зазора (по другим стандартам в зависимости от модуля и типа инструмента с* может быть равен 0,2; 0,3; 0,35);
Приведенные коэффициенты являются безразмерными величинами. Абсолютное значение какого-либо размера получается умножением соответствующего коэффициента на модуль (Например: высота головки зуба ha=ha * ∙m; величина радиального зазора c = c*∙m и т. д.).
Таким образом, форма зуба остается постоянной, а абсолютные размеры определяются модулем (т.е. модуль является как бы коэффициентом пропорциональности).
По высоте зуб исходного контура делится на головку и ножку. Это деление осуществляется делительной прямой. Делительная прямая рейки – это прямая, на которой толщина зуба равна ширине впадины (рисунок 40б).
Высота ножки зуба несколько больше головки для обеспечения радиального зазора между вершинами зубьев одного колеса и окружностью впадин другого после сборки передачи.
Стандартные параметры исходного контура на эвольвентное колесо «переносятся» через делительную окружность (на делительной окружности шаг равен стандартному шагу исходного контура p= π ∙ m, угол профиля равен углу профиля исходного контура α = 20 0 ).
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Эвольвента и ее свойства
Основная теорема зацепления
Постоянство передаточного отношения в зубчатом механизме обеспечивается за счет правильного подбора профилей соприкасающихся зубьев. Какими должны быть профили зубьев зубчатых колес, чтобы передаточное отношение было строго постоянным, т.е. чтобы начальные окружности перекатывались друг по другу без скольжения? Ответ на этот вопрос дает основная теорема зацепления:
Общая нормаль к профилям, образующим высшую кинематическую пару, проходит через полюс зацепления и делит межцентровое расстояние на части, обратно пропорциональные угловым скоростям.
Докажем эту теорему.

Рис.15 К основной теореме зацепления
На рис. 15 изображены два звена, которые, касаясь в точке М, образуют высшую кинематическую пару (это могут быть зубья двух зубчатых колес). Звено 1, вращаясь вокруг оси О1 с угловой скоростью ω1, воздействует на звено 2, заставляя его вращаться вокруг оси О2 с угловой скоростью ω2. Проведем через точку касания М общие касательную tt и нормаль nn.
Оба звена должны быть в постоянном соприкосновении. Для этого необходимо, чтобы проекции скоростей точки касания М обоих звеньев на общую нормаль были равны. В противном случае либо одно звено опередит другое (нарушится контакт), либо произойдет смятие в точке контакта.
Проведем векторы скоростей точки М обоих звеньев. Вектор v1 скорости точки М звена 1 перпендикулярен радиус-вектору О1М, вектор v2 скорости точки М звена 2 перпендикулярен радиус-вектору О2М. Разложим каждый из этих векторов на две составляющие — нормальные и касательные. Нормальные составляющие, как уже указывал ось, должны быть равны
гдe a1 и a2 — углы отклонения векторов v1 и v2 от нормали nn.
Восстановим из точек О1 и О2 перпендикуляры на нормаль О1К1 и О2K2.
Треугольники О1К1P и О2К2P подобны, следовательно,
Сопоставляя последние два равенства, окончательно получим
u12= ω1/ ω2= О2P/ О1P, где P – полюс зацепления, делит межцентровое расстояние на части, обратно пропорциональные угловым скоростям
Из равенства следует: чтобы передаточное отношение было постоянным, необходимо, чтобы отрезки О1P и О2P, на которые нормаль nn делит межосевое расстояние, были постоянной величины. Другими словами, необходимо, чтобы нормаль всегда, в любом положении звеньев, проходила через одну и ту же точку Р.
Боковые профили зубьев должны очерчиваться такими кривыми, общая нормаль к которым в точке их касания делит межцентровое расстояние на части, обратно пропорциональные угловым скоростям. Этому требованию отвечает большое количество кривых, на практике получили применение эвольвента, циклоида, дуга окружности и прямая.
Из рис.15 видно, что касательные составляющие скоростей точек касания не равны между собой, следовательно, профили зубьев скользят друг по другу. Это вызывает износ зубьев.
Скольжение между зубьями будет тем больше, чем дальше находится точка касания от полюса зацепления.
vскпри lМ, vск=0приlМ=0, т.е. только в одном положении, когда точка касания зубьев совпадает с полюсом зацепления Р, нет скольжения между профилями зубьев, т.к. скорости точек касания в этом положении векторно равны.
Эвольвента и ее свойства
Эвольвента (предложена Эйлером) – кривая, описываемая любой точкой прямой линии при перекатывании этой прямой по окружности без скольжения.
Рассмотрим построение эвольвенты.
К окружности с центром в т.О (рис.16) проведена касательная в т.А. Будем перекатывать прямую по окружности без скольжения. Для этого от т.А отложим по прямой ряд одинаковых по длине отрезков А-1, 1-2,2-3,3-4… По окружности от т.А отложим дуги ÈА-1’, È1’-2’ и т.д., равные этим отрезкам. При перекатывании прямой по окружности без скольжения т.1 совпадет с т.1’ и т.д. Проведем в точках 1’, 2’,… касательные к окружности (проводим радиус, а затем перпендикуляр) и отложим на них от точек касания отрезки 1’А1, 2’А2,…, равные, соответственно, отрезкам прямой А1, А2, А3… Соединяя точки А, А1, А2, А3, А4 плавной кривой получим эвольвенту.

Рис. 16 Построение эвольвенты
Прямая, перекатывающаяся по окружности, называется производящей прямой, а окружность, по которой перекатывается производящая прямая, называется основной и ей присваивается индекс b. Точка А, лежащая на основной окружности, является начальной точкой эвольвенты. Следовательно, внутри основной окружности эвольвента находиться не может. Для точки А радиус-вектор равен радиусу основной окружности, радиус кривизны r равен 0, эвольвентный и профильный угол тоже равны 0.
Эвольвента обладает следующими свойствами:
1) Производящая прямая является нормалью к эвольвенте в любой ее точке и является касательной для основной окружности;
2) Эвольвента начинается на основной окружности и всегда находится вне ее;
3) Форма эвольвенты зависит только от радиуса основной окружности; при увеличении радиуса rb радиус кривизны эвольвентного профиля постепенно увеличивается, при rb=¥ эвольвента преобразуется в прямую (этот случай имеет место при реечном зацеплении);
4) Эвольвента является кривой без перегибов;
5) Центр кривизны эвольвенты лежит в точке касания нормали с основной окружностью.
Выведем уравнение эвольвенты.
Пусть координатами какой-либо точки А4 эвольвенты будут: R – радиус-вектор и q — эвольвентный угол – угол между радиусом-вектором начальной точки эвольвенты и радиусом-вектором т.А4 (текущей точки), a — профильный угол, т.е. угол профиля текущей точки эвольвенты.
Из треугольника ОМА4 имеем R=rb/cosa(1) – радиус-вектор профиля.
Т.к. перекатывание происходит без скольжения, то А4М=ÈАМ;
tga=q+a Þ q=tga-a=inva (2) — эвольвентная функция угла a, или инволюта. Составлены таблицы инволютных значений углов. Уравнения (1) и (2) – уравнения эвольвенты окружности в полярных координатах в параметрической форме.
http://isopromat.ru/tmm/kratkij-kurs/evolventnoe-zaceplenie
http://megaobuchalka.ru/4/16655.html