Канонические уравнения Гамильтона и формулы



Канонические уравнения Гамильтона
- Подумайте о консервативной материальной системе, где свобода — это s. Обобщенные координаты qb qt, qs select. Чтобы использовать эту систему, используя уравнение Лагранжа 2-го порядка, необходимо создать дифференциальное уравнение 2-го порядка. Для П-функции Лагранжа. Уменьшите число уравнений в 2 раза, чтобы уменьшить порядок первого дифференциального уравнения из 2-го дифференциального уравнения.
Создание нормального уравнения рекомендуется выполнять в следующем порядке. 1 Найти число степеней свободы данной консервативной материальной системы и выбрать соответствующие обобщенные координаты 2 Найти обобщенный импульс, сопряженный с выбранными обобщенными координатами см. пункт 1 в этом разделе 3 вычислить функцию Гамильтона см. подраздел 2 в этом разделе.4 Создайте стандартное уравнение, используя формулу 8.Задание 17.12.Создайте стандартное уравнение движения свободных материальных точек массой m в гравитационном поле. Выберите декартовы координаты x, y и r в качестве обобщенных координат. Решение.
Вторые слагаемые уравнений (9) и (20) соответственно определяют вынужденные колебания стрелки В при отсутствии и при наличии силы сопротивления движению. Людмила Фирмаль
Это можно сделать по-разному ways .In в частности, если к координатам добавляются дополнительные координаты-универсальный момент pt, pp. Параметры qt и 1 2.. A называется регулярной переменной. Обобщенная координата qt и соответствующий ей импульс p сопряженная называется канонической переменной. Эти 2 канонические переменные соответствуют 2 из канонического уравнения Гамильтона. Где i-функция Гамильтона, 4 1, 2,. .это Каноническое уравнение Гамильтона является обыкновенным дифференциальным уравнением на 2-м этаже а не частным дифференциалом это не. Помимо механики, стандартные уравнения используются в квантовой механике, электродинамике и других дисциплинах теоретической физики.
Есть 3 степени свободы для свободного материала points .So, чтобы объяснить его движение, нам нужно 6 канонических переменных. Обобщенный импульс px, pu, pg был задан в уравнении вещества 17.7 2.Создайте 6 уравнений Гамильтона 8.в этом случае у вас есть следующий вид пеленгатор 5G ОТЛИЧИТЕЛЬНОЕ ИМЯ. ГПЦ прочая Л. Используйте функцию Гамильтона H, составленную в вопросе 17.9 см. уравнение 3 W 2 pl p pl wgz .Подставляя это значение и в уравнение 1, находим искомое стандартное уравнение.— П.
Эти канонические уравнения размером 1 на 6 для переменных x, y, z, px, Py, pg можно свести к дифференциальным уравнениям размером 2 на 3 для переменных x, y и R. In факт, вычисляя производные по Времени первых 3 канонических уравнений 2 и решая их относительно px, pu, px Подставляя уравнение 2 Эти значения находятся в последних 3 стандартных px, pu, pg после уменьшения m .e 0, J 0 2 г. 3. Уравнение 3 является дифференциальным уравнением для свободных материальных точек в гравитационном поле проекции на Декартовы координатные оси.
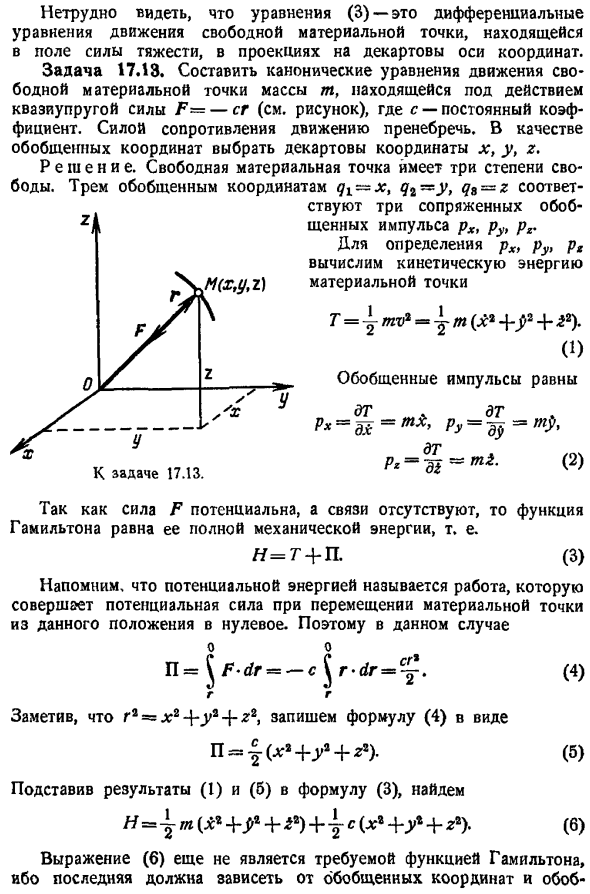
Задача 17.13. To создайте стандартное уравнение движения свободной материальной точки массой m под действием квазиупругой силы F cr см. Рисунок, c-постоянный коэффициент. Игнорируйте сопротивление движению. Выберите декартовы координаты x, y и g в качестве обобщенных координат. Решение. Есть 3 степени свободы для свободных материальных точек.3 обобщенные координаты Oi x, Q z К выпуску 17.13.Существует 3 сопряженных обобщенных импульса px, pu, pg .вычислить кинетическую энергию массы точек для определения ПВ, Пу, И П Т 4-1Н м х 2 Л- 1 Обобщенный импульс равен Сила F-это потенциал, и поскольку связи нет, функция Гамильтона равна его полной механической энергии.
Напомним, что потенциальная энергия-это работа, которую потенциальная сила выполняет при перемещении материальной точки из определенного положения в другое. zero .So в этом случае О, да.— ЗР -Р-РФР — в.4 заметим, что r2×2 y z2, запишем Формулу 4 в следующем формате н х ЮЖД з.5 Если подставить результат I и b выражения 3 Уравнение 6 все еще должно зависеть от обобщенных координат и обобщения, поэтому функция Гамильтона пока не нужна. Шейка матки impulse .So, используя формулу 2, мы представляем обобщенную скорость в соответствии с обобщенным импульсом.
- Введем выражения A, и получим Гамильтонову функцию в выражении 6 в виде Приступим к созданию канонического уравнения ду Р 7. Формат в этом случае является Подставим формулу функции в формулу 8 и получим стандартное уравнение интересующего движения из Формулы 7.Т ПРОМАЛЬП — СХ ру — П — автомат. 9 6 канонических переменных х, г, р, РХ, Р Мы получили 1 6-е каноническое уравнение, соответствующее П. эти уравнения можно свести к 2, 3 дифференциальным уравнениям в проекции на Декартовы оси. Для этого нужно дифференцировать первые 3 канонических уравнения 9, решить их относительно px, pu, p и подставить найденные pn, p в последние 3 уравнения 9.Возьми н — СХ, ту — КР, м3 — автомат.
Уравнение 10 является проекцией векторного уравнения mw F, то есть mw — cg на Декартовы координатные оси. Задание 17.14, составьте стандартное уравнение движения свободных материальных точек массой m под действием центральной силы. Энергия положения равна P P g .Выбираем полярные координаты р и Р, так как они являются обобщенными. Решение.2 обобщенные координаты r и p соответствуют 2 сопряженным импульсам pg и pf .Они были рассчитаны в решении задачи 17.7 см. уравнение 5.Центральная сила F-это потенциал, и нет никакой связи, поэтому функция Гамильтона равна сумме механической энергии.
При наличии силы сопротивления движению, пропорциональной скорости ползуна, колебания с частотой свободных колебаний затухают и стрелка прибора регистрирует. Людмила Фирмаль
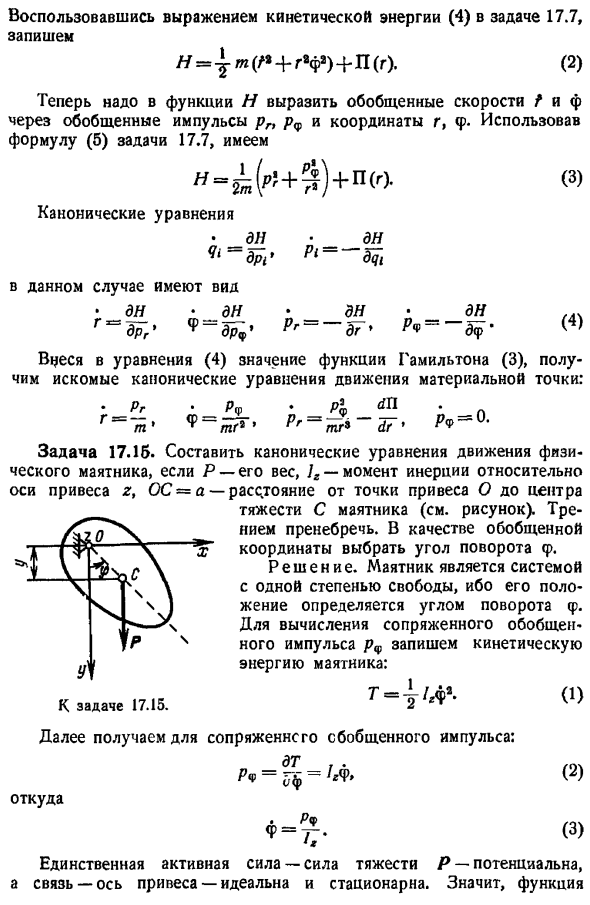
Используя уравнение кинетической энергии задачи 17.7 4, запишем Гг, Р, 1 р р.2 Здесь в функции надо необходимо выразить обобщенный импульс PN P и обобщенные скорости T и относительно координат R, P .используя формулу в вопросе 17.7 5 И затем Канонические уравнения В этом деле Получим искомое стандартное уравнение для движения точки масс путем возведения значения функции Гамильтона 3 в уравнение 4.4 RFE RL п н г доктор РФ 0.Задача 17.16.Если P-его вес, то для составления стандартного уравнения движения физического маятника, 1g — момент инерции к оси усиления, r, OS a-расстояние от точки усиления O до центра. Л По вопросу 17.15.Тяжесть от маятника см. фото. Игнорируйте 3-й.
Выберите угол поворота p в качестве обобщенной координаты. Решение. Маятник представляет собой систему с 1 степенью свободы, так как его положение определяется углом наклона rotation .To вычислите сопряженный обобщенный импульс rf, опишите кинетическую энергию маятника. Т Л Р.1 Тогда мы получаем dT, для сопряженного обобщенного импульса. РЗ ИБ м от 2 3 Единственная действующая сила-гравитация Р — это потенциал, а связь-ось усиления-идеальна и неподвижна.
Таким образом, функция Гамильтон равен полной механической энергии маятника Я Г П 4 Потенциальная энергия маятника П пу — Пасуш п.5 Если ввести результат 1 и 5 в Формулу 4 Y4Ф2-Pa cos p. 6 Напомним, что эта формула для H не может быть использована для создания канонического уравнения, так как Гамильтонова функция должна быть выражена в соответствии с обобщенными координатами и импульсом. Используйте уравнение 3, чтобы исключить обобщенную скорость из уравнения 6.2 РЧ-Ра со Ф.7 В этом случае форма канонического уравнения имеет вид День ду Введя значение функции Гамильтона 8 в уравнение 7, получим искомое уравнение движения физического маятника.— peslnqi.
Стандартное уравнение 9 эквивалентно 2-му-1-му дифференциальному уравнению. Первое уравнение 9 получается путем дифференцирования по времени и исключения rf из 2-го уравнения 9 дифференциального уравнения качания маятника. РФ — па грех Ф. Задача 17.16.Используйте каноническое уравнение Гамильтона для получения закона сохранения полной механической энергии.
По формуле, приведенной в подразделе 2 этого раздела 5, было показано, что Гамильтонова функция H в случае голономной системы зависит, вообще говоря, от времени, обобщенных координат, обобщенного импульса. ГБ Пи, 1 Где 1 1, 2, .. S — число степеней свободы в материальной системе. Вычислить производную по времени функции 1 dh dn. ОТЛИЧИТЕЛЬНОЕ ИМЯ. День. День. .отличительное имя. День. День Используя нормальное уравнение Он также заменяет p Формулы 2.З.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Магия тензорной алгебры: Часть 12 — Параметры Родрига-Гамильтона в кинематике твердого тела
Введение
Наконец-то мы подошли к довольно интересной теме — выбору параметров, однозначно определяющих ориентацию твердого тела в пространстве. Исторически наиболее популярными являются углы поворота — они в первую очередь упоминаются в классических учебниках теоретической механики.

Рис.1. Углы Эйлера — параметры, знакомые каждому, кто занимался компьютерной графикой и моделированием пространственного движения тел. И каждый, кому они знакомы, знает, насколько проблематичным бывает их использование.
Обычно углы поворота используют совместно с декартовой системой координат, при этом говорят, что связанная система координат может быть совмещена с базовой путем трех последовательных поворотов вокруг её осей. При этом каждый следующий поворот осуществляется вокруг оси, полученной после предыдущего поворота. Кроме того, следующий поворот не должен происходить вокруг оси, относительно которой совершен предыдущий поворот. В связи с этим существует 12 различных комбинаций углов поворота, самыми известными из которых являются углы Эйлера (рисунок 1). Базовую систему координат поворачивают на угол  вокруг оси Z (угол прецессии), затем на угол вокруг оси X (угол нутации), и снова вокруг оси Z на угол (угол собственного вращения) до совмещения её со связанной системой координат.
вокруг оси Z (угол прецессии), затем на угол вокруг оси X (угол нутации), и снова вокруг оси Z на угол (угол собственного вращения) до совмещения её со связанной системой координат.
Использование углов Эйлера всем хорошо — их число совпадает с числом вращательных степеней свободы твердого тела, а значит они не порождают избыточных уравнений связей. Но, даже не прибегая к громоздким формулам, по рисунку 1, можно догадаться, где кроется проблема.
Рис. 2. Знаменитые кинематические уравнения Эйлера. Я, в своё время, хлебнул с ними долгих и кропотливых отладок
Существует два значения угла нутации, при которых происходит вырождение кинематических уравнений Эйлера (рисунок 2) — и . Предположим, что угол нутации принял одно из этих значений — тогда угол прецессии и угол собственного вращения описывают поворот вокруг одной и той же оси Z и принципиально неразличимы друг от друга. При использовании кинематических уравнений Эйлера мы получаем ноль в знаменателе и NaN в фазовых координатах. Приплыли, процедура интегрирования рухнула.
Другой вариант углов поворота — самолетные углы: — рыскание, — тангаж и — крен (рисунок 3).

Рис. 3. Самолетные углы — один из практических способов определения ориентации летательного аппарата в пространстве
Данные параметры поворота вырождаются при тангажах , при этом неразличимы становятся крен и рыскание. Матерые симуляторщики знают, как сходит с ума КПП при выходе на крутые тангажи.
Все возможные комбинации углов поворота имеют вырождение. Для моделирования и закладки в алгоритмы систем управления ориентацией область их применения ограничивается критическими значениями параметров. В прошлой статье мы показали, что не подходят и параметры конечного поворота, а использование непосредственно компонентов тензора поворота затрудняется излишне глубокими зависимостями между ними, что порождает высокий порядок системы уравнений движения.
Однако, ещё великий Леонард Эйлер ввел в рассмотрение четыре параметра, которые не имеют вырождения. На его публикацию по этому поводу тогдашний научный мир особого внимания не обратил. Данная идея, независимо от Эйлера была развита Олидом Родригом, а в работах Уильяма Гамильтона получила окончательное теоретическое обоснование. Встречайте —
1. Кватернионы и действия над ними
Кватернионом называют число вида
где называют компонентами кватерниона. Сами числа (1) образуют множество гиперкомплексных чисел , включающее в себя все действительные числа и множество комплексных чисел . Математики эпохи, когда работал Гамильтон, уже знали о комплексных числах и о том, как построенные на их основе методы позволяют решать задачи планиметрии и естественным было желание расширить понятие комплексного числа для применения подобных методов к пространственным задачам. Проблема была в том, что добавление второй мнимой единицы не решало проблемы. Гамильтону пришла в голову мысль, что подобные расширенные комплексные числа могут быть не трех-, а четырехкомпонентными. Работая в этом направлении, в порыве вдохновения на одной из прогулок он вывел правило умножения таких чисел, что окончательно сложило мозаику новорожденной теории.
Так вот, перемножение кватернионов сводится к алгебраической операции перемножения сумм, с той лишь разницей, что требуется определить правила умножения мнимых единиц. Традиционно, каждая из мнимых единиц возведенная в квадрат дает -1
а их попарные произведения хорошо описываются диаграммой

Рис. 4. Диаграмма перемножения мнимых единиц в кватернионе
смысл которой прост — если перемножать пары мнимых единиц в порядке, указанном стрелкой, то получается третья мнимая единица со знаком «+». Если порядок перемножения изменить на противоположный — получится третья мнимая единица со знаком «-«. Не напоминает правило векторного перемножения ортов в декартовых координатах? Это оно и есть, то есть мы получаем
Пользуясь этими правилами перемножим два кватерниона
Ого! Не слабо, но мы смело приводим подобные слагаемые
и, ну наверняка вы видите тут до боли знакомые действия над векторами. Пусть у нас будут заданы векторы
тогда каждый кватернион можно представить парой скаляр-вектор
а результат их умножения
Не трудно просто сравнить эту формулу с результатом умножения, которое мы выполнили, при этом считая мнимые единицы ортами декартова базиса. Таким образом, кватернионы включают в себя и векторы трехмерного пространства, и например, кватернионы вида и , будут скалярами, и их произведение эквивалентно произведению скалярных величин
А кватернионы вида и называются векторными кватернионами, и их произведение
дает скалярное, со знаком минус, и векторное произведение составляющих их векторов.
Из-за наличия в результате произведения векторного умножения, операция умножения кватернионов не коммутативна
Ну и надо ли говорить, что обнуляя два последних коэффициента у каждого из кватернионов мы получим произведение комплексных чисел? Думаю не стоит, ибо мы не погружаемся в комплексную область, а если и говорим о комплексных числах, то там где это требуется.
Не стану так же говорить о том, что сложение кватернионов и умножение их на число аналогично соответствующим операциям в комплексной области. А вот о чем надо поговорить, так о сопряжении кватерниона
о связанной с ним операции вычисления нормы
и операции вычисления обратного кватерниона
И ещё одно полезное свойство, касающееся сопряжения произведения кватернионов
Кроме того, норма обратного кватерниона — величина обратная норме исходного
Эти операции имеют непосредственное отношение к тому, для чего в наши дни используют гиперкомплексные числа
2. Кватернион как линейный оператор поворота
Теперь посмотрим на вот такой фокус. Пусть — один кватернион, а — другой кватернион. Докажем небольшую теорему
Преобразование вида
Проверяется это утверждение прямым вычислением
Действительно, норма кватерниона не изменяет при подобном преобразовании. А если кватернион будет векторным кватернионом, то не изменится норма вектора, которым он определяется. То есть описанное преобразование над вектором, не меняет его длины, оно будет ортогональным, или преобразованием поворота! Дело за малым — выяснить, вокруг какой оси и на какой угол происходит поворот, определяемый конкретным кватернионом. Для этого возьмем (нам ведь никто не мешает так сделать) и представим кватернион в виде
Величину, стоящую в скобках называют вензором (не путать с тензором!) кватерниона. Поупражняемся над его векторной частью
Никто не мешает делать нам эквивалентных преобразований, вот мы и делаем их. Теперь введем замену
На каком основании? Да на том, что сумма квадратов этих величин всегда даст единицу, а если это так, то никто не мешает представить данные величины как синус и косинус некоторого угла. Почему угол делим на два? Нам так хочется, потом это нам пригодится, ведь угол можно взять произвольный. Исходя из введенной замены мы можем переписать кватернион в виде
Заметим, что вектор , введенный нами, является единичным, так как
В довершении позволим себе ещё одно допущение — пусть кватернион будет единичным, то есть
Теперь аккуратно выполним ортогональное преобразование над векторным кватернионом
Теперь умножим результат (2) на обратный кватернион
Для того чтобы не загромождать текст «крокодилами» вычислим отдельно скалярную
и векторную часть
результата преобразования. В конечном итоге, на основании формул (3) и (4), проведя не сложные тригонометрические упрощения, приходим к выводу, что на выходе получается некоторый вектор
Так это же… формула конечного поворота Родрига! Выходит, что преобразование
которое, с учетом того, что для единичного кватерниона операция вычисления обратного кватерниона эквивалентна сопряжению, можно переписать в виде
эквивалентно повороту вектора вокруг оси, задаваемой ортом на угол . Угол поворота и вектор, вокруг которого происходит вращение можно рассчитать по компонентам кватерниона, исходя из замен, введенных нами выше.
Выводы
Мы убедились, что единичный кватернион, компоненты которого построены по формулам
определяет конечный поворот. Четыре параметра, которые мы привели и есть те самые параметры Родрига-Гамильтона, которые однозначно определяют ориентацию твердого тела в пространстве и не вырождаются при любых параметрах вращения. Например, если мы обнулим угол поворота, то орт оси вращения так же станет равен нулю. При повороте на любой конечный угол мы всегда можем рассчитать положение оси поворота.
Что же, а за окном тем временем рассвело… План данной статьи был несколько иным, и мы ни слова не сказали о тензорах. Да оно и к лучшему, зато мы теперь имеем четкое представление о том, что за хитрые параметры ориентации будем использовать в дальнейшем.
ГА́МИЛЬТОНА УРАВНЕ́НИЯ
В книжной версии
Том 6. Москва, 2006, стр. 357
Скопировать библиографическую ссылку:





ГА́МИЛЬТОНА УРАВНЕ́НИЯ (канонические уравнения механики), дифференциальные уравнения движения голономных механич. систем, находящихся под действием потенциальных сил. Предложены У. Гамильтоном в 1834.
http://habr.com/ru/post/263533/
http://bigenc.ru/physics/text/2343102