Гармонический осциллятор.Пружинный маятник.Физический маятник.Математический маятник.
Гармоническим осциллятором называется система, которая совершает колебания, описываемые выражением вида d2s/dt2 + ω02s = 0 или
(1) 
где две точки сверху означают двукратное дифференцирование по времени.
1. Пружинный маятник — это груз массой m, который подвешен на абсолютно упругой пружине и совершает гармонические колебания под действием упругой силы F = –kx, где k — жесткость пружины. Уравнение движения маятника имеет вид


Из формулы (1) вытекает, что пружинный маятник совершает гармонические колебания по закону х = Асоs(ω0t+φ) с циклической частотой
(2) 
(3) 
Формула (3) верна для упругих колебаний в границах, в которых выполняется закон Гука, т. е. если масса пружины мала по сравнению с массой тела. Потенциальная энергия пружинного маятника, используя (2) и формулу потенциальной энергии предыдущего раздела, равна

2. Физический маятник — это твердое тело, которое совершает колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, которая проходит через точку О, не совпадающую с центром масс С тела.
Если маятник из положения равновесия отклонили на некоторый угол α, то, используя уравнение динамики вращательного движения твердого тела, момент M возвращающей силы

где J — момент инерции маятника относительно оси, которая проходит через точку подвеса О, l – расстояние между осью и центром масс маятника, Fτ ≈ –mgsinα ≈ –mgα — возвращающая сила (знак минус указывает на то, что направления Fτ и α всегда противоположны; sinα ≈ α поскольку колебания маятника считаются малыми, т.е. маятника из положения равновесия отклоняется на малые углы). Уравнение (4) запишем как


(5) 

идентичное с (1), решение которого (1) найдем и запишем как:
(6) 
Из формулы (6) вытекает, что при малых колебаниях физический маятник совершает гармонические колебания с циклической частотой ω0 и периодом

где введена величина L=J/(ml) — приведенная длина физического маятника.
Точка О’ на продолжении прямой ОС, которая отстоит от точки О подвеса маятника на расстоянии приведенной длины L, называется центром качаний физического маятника (рис. 1). Применяя теорему Штейнера для момента инерции оси, найдем

т. е. ОО’ всегда больше ОС. Точка подвеса О маятника и центр качаний О’ имеют свойство взаимозаменяемости: если точку подвеса перенести в центр качаний, то прежняя точка О подвеса будет новым центром качаний, и при этом не изменится период колебаний физического маятника.
3. Математический маятник — это идеализированная система, состоящая из материальной точки массой m, которая подвешена на нерастяжимой невесомой нити, и которая колеблется под действием силы тяжести.
(8) 
где l — длина маятника.
Поскольку математический маятник есть частный случай физического маятника, если предположить, что вся его масса сосредоточена в одной точке — центре масс, то, подставив (8) в (7), найдем выражение для периода малых колебаний математического маятника
(9) 
Сопоставляя формулы (7) и (9), видим, что если приведенная длина L физического маятника равна длине l математического маятника, то периоды колебаний этих маятников одинаковы.
Сложение гармонических колебаний (одного направления и одинаковой частоты).







На основании закона cos:





 =
=

Таким образом возникают колебания, амплитуда которых будет исследована из следующей функции времени:

Свободные гармонические колебания.
Если заряженный конденсатор подсоединить к катушке, то конденсатор начнет разряжаться. По мере разрядки увеличивается разрядный ток, который достигает максимума при полной разрядке конденсатора, при этом энергия  переходит в энергию магнитного поля.
переходит в энергию магнитного поля.  С момента полной разрядки конденсатора ток в цепи начнет убывать. При уменьшении тока явление самоиндукции в цепи возникает индукционный ток того же направления, что и токI и конденсатор начинает перезаряжаться. И в момент полной зарядки ток в цепи станет равным нулю. На основе законов Ома:
С момента полной разрядки конденсатора ток в цепи начнет убывать. При уменьшении тока явление самоиндукции в цепи возникает индукционный ток того же направления, что и токI и конденсатор начинает перезаряжаться. И в момент полной зарядки ток в цепи станет равным нулю. На основе законов Ома:
Гармонические колебания в физике — формулы и определение с примерами
Содержание:
Гармонические колебания:
Некоторые движения, встречающиеся в быту, за равные промежутки времени повторяются. Такое движение называется периодическим движением. Часто встречается движение, при котором тело перемещается то в одну, то в другую сторону относительно равновесного состояния. Такое движение тела называется колебательным движением или просто колебанием.
Колебания, совершаемые телом, которое выведено из равновесного состояния в результате действия внутренних сил, называются собственными (свободными) колебаниями. Величина удаления от равновесного состояния колеблющегося тела называется его смещением (
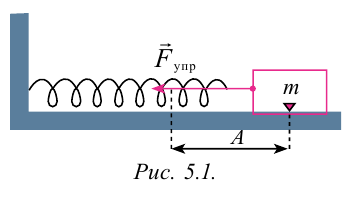
Для наблюдения механических колебаний ознакомимся с колебаниями груза, закрепленного на конце пружины (рис. 5.1). На этом рисунке груз, закрепленный на пружине, сможет двигаться без трения с горизонтальным стержнем, так как силу тяжести шарика приводит в равновесие реакционная сила стержня.
Коэффициент упругости пружины –  , а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
, а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
Если груз, который находится в равновесии, потянем вправо на расстояние  и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
сторону равновесного состояния.

С течением времени смещение груза уменьшается относительно  , но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение (
, но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение ( ) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
Для определения закономерности изменения в течение времени системы, которая периодически совершает колебания, заполним воронку песком, подвесим на веревке, подложим бумагу под систему и раскачаем воронку. В ходе колебания начинаем равномерно вытягивать бумагу из-под системы. В результате мы увидим, что следы песка на бумаге образуют синусоиду. Из этого можно сделать следующий вывод: смещение периодически колеблющегося тела по истечении времени изменяется по закону синусов и косинусов. При этом самое большое значение смещения равняется амплитуде ():

здесь:  – циклическая частота, зависящая от параметров колеблющихся систем,
– циклическая частота, зависящая от параметров колеблющихся систем,  – начальная фаза, (
– начальная фаза, ( ) фаза колебания с течением времени
) фаза колебания с течением времени  .
.
Из математики известно, что  поэтому формулу (5.2.) можно записать в виде
поэтому формулу (5.2.) можно записать в виде

Колебания, в которых с течением времени параметры меняются по закону синуса или косинуса, называются гармоническими колебаниями.
Значит, пружинный маятник, вышедший из равновесного состояния, совершает гармоническое колебание. Для того чтобы система совершала гармоническое колебание: 1) при выходе тела из равновесного состояния, для возвращения его в равновесное состояние должна появиться внутренняя сила; 2) колеблющееся тело должно обладать инертностью и на него не должны оказывать воздействие силы трения и сопротивления. Эти условия называется условиями проявления колебательных движений.
Основные параметры гармонических колебаний
a) период колебания  – время одного полного колебания:
– время одного полного колебания:
 )
)
б) частота колебания  – количество колебаний, совершаемых за 1 секунду:
– количество колебаний, совершаемых за 1 секунду:

Единица 
c) циклическая частота  – количество колебаний за
– количество колебаний за  секунд:
секунд:

С учетом формул (5.5) и (5.6) уравнение гармонических колебаний (5.2) можно записать в следующей форме.

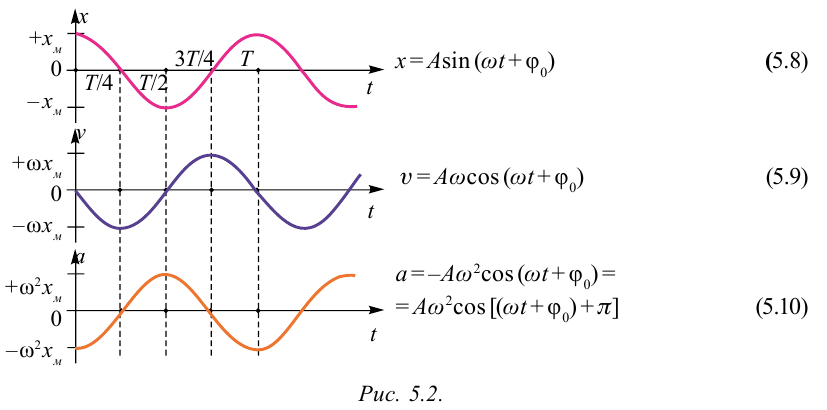
Большинство величин, количественно описывающих гармонические колебания, смещения которых с течением времени меняются по закону синусов или косинусов (скорость, ускорение, кинетическая и потенциальная энергия), тоже гармонически меняются.
Это подтверждается следующими графиками и уравнениями:
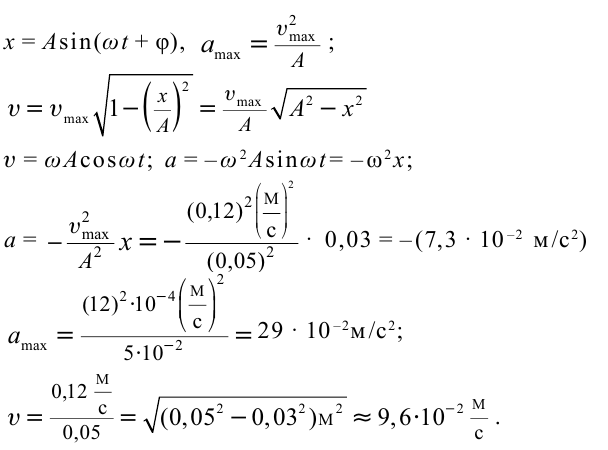
Пример решения задачи:
Точка совершает гармоническое колебательное движение. Максимальное смещение и скорость соответственно равны 0,05 м и 0,12 м/с. Найдите максимальное ускорение и скорость колебательного движения, а также ускорение точки в момент, когда смещение равно 0,03 м.

Формула и решение:
Гармонические колебания пружинного маятника
В 1985 году в городе Мехико произошла ужасная катастрофа, причина которой было землетрясение: 5526 человек погибли, 40 ООО человек ранены, 31000 человек остались без крова. Из проведенных затем исследований ученые выяснили, что главной причиной разрушений во время землетрясения является совпадение частоты свободных колебаний зданий с частотой вынужденных колебаний Земли. Поэтому при возведении новых зданий в сейсмически активной зоне необходимо, чтобы эти частоты не совпадали. Это даст возможность уменьшить последствия землетрясения. С этой целью важно знать, от чего зависят частота и период колебаний.
Одной из простейших колебательных систем, совершающих гармонические колебания, является пружинный маятник.
Пружинный маятник — это колебательная система, состоящая из пружины и закрепленного на ней тела. Колебания, возникающие в пружинном маятнике, являются гармоническими колебаниями:
Под гармоническими колебаниями подразумеваются колебания, возникающие под действием силы, прямо пропорциональной перемещению и направленной против направления перемещения.
Исследование колебаний пружинного маятника имеет большое практическое значение, например, при вычислении колебаний рессор автомобиля при езде; в исследовании воздействия колебаний на фундамент зданий и тяжелых станков, в определении эластичности ушных перепонок при диагностике лор-заболеваний. По этой причине изучение колебаний пружинного маятника является актуальной проблемой.
С целью уменьшения количества сил, действующих на колебательную систему, целесообразно использовать горизонтально расположенную колебательную систему пружина-шарик (d).
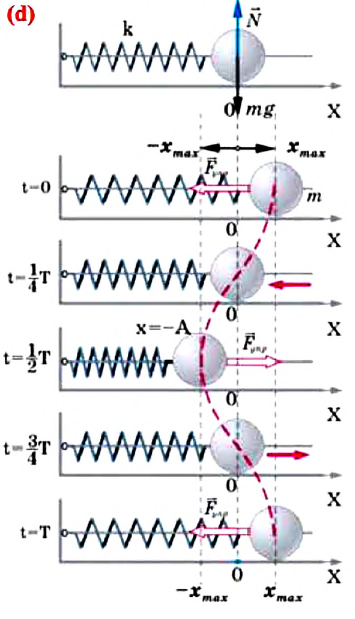
В этой системе действия силы тяжести и реакции опоры уравновешивают друг друга. При выведении шарика из состоянии равновесия, например, при растяжении пружины до положения  сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:
сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:

Формула (4.9) является уравнением свободных гармонических колебаний пружинного маятника.
Где  — масса шарика, закрепленного на пружине,
— масса шарика, закрепленного на пружине,  — проекция ускорения шарика вдоль оси
— проекция ускорения шарика вдоль оси  — жесткость пружины,
— жесткость пружины,  -удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение
-удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение  — постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение
— постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение  соответствует квадрату циклической частоты
соответствует квадрату циклической частоты 
Таким образом, уравнение движения пружинного маятника можно записать и так:

Уравнение (4.12) показывает, что колебания пружинного маятника с циклической частотой  являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:
являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:

Так как тригонометрическая функция является гармонической функцией, то и колебания пружинного маятника являются гармоническими колебаниями.
Здесь  фаза колебания,
фаза колебания,  — начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:
— начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:  Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы
Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы  В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
 или
или 
Из сравнения выражений (4.11) и (4.5) определяются величины, от которых зависят период и частота колебаний пружинного маятника:
Из выражений (4.14) и (4.15) видно, что период и частота пружинного маятника зависят от жесткости пружины и массы груза, подвешенного к нему.
Гармонические колебания математического маятника
До наших дней дошла такая историческая информация: однажды в 1583 году итальянский ученый Г. Галилей, находясь в храме города Пиза, обратил внимание на колебательное движение люстры, подвешенной на длинном тросе. Он, сравнивая колебания люстры со своим пульсом, определил, что, несмотря на уменьшение амплитуды колебания, время, затрачиваемое на одно полное колебание (период колебания) люстры, не изменяется. Затем Галилей в результате многочисленных проведенных исследований, изменяя длину нитевого маятника, массу подвешенного к нему груза, высоту расположения маятника (по сравнению с уровнем моря), определил, от чего зависят период и частота колебаний маятника.
Гармонические колебания возникают также под действием силы тяжести. Это можно наблюдать с помощью математического маятника.
Математический маятник — это идеализированная колебательная система, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити.
Для исследования колебаний математического маятника можно использовать систему, состоящую из тонкой длинной нити и шарика (b).
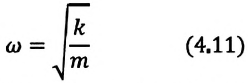
Сила тяжести  действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити
действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити  Однако, если вывести маятник из состояния равновесия, сместив его на малый угол
Однако, если вывести маятник из состояния равновесия, сместив его на малый угол  в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити
в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити  и перпендикулярная нити
и перпендикулярная нити  Сила натяжения
Сила натяжения  и составляющая силы тяжести
и составляющая силы тяжести  уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей
уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей  «пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой
«пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой  в проекциях на ось ОХ:
в проекциях на ось ОХ:
Приняв во внимание, что:

Для уравнения движения математического маятника получим:

Где  — длина математического маятника (нити),
— длина математического маятника (нити),  — ускорение свободного падения,
— ускорение свободного падения,  — амплитуда колебания.
— амплитуда колебания.
Для данной колебательной системы отношение  — постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты
— постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты 


Таким образом, уравнение движения математического маятника можно записать и так:

Уравнение (4.19) показывает, что колебания математического маятника являются гармоническими колебаниями с циклической частотой со. Из математики вы знаете, что решением этого уравнения является нижеприведенная функция:

Так как эта функция является гармонической, то и колебания математического маятника являются гармоническими колебаниями.
Отсюда определяются величины, от которых зависят период и частота колебаний математического маятника:
Таким образом, период и частота колебаний математического маятника зависят от длины маятника и напряженности гравитационного поля в данной точке.
Скорость и ускорение при гармонических колебаниях
Вы уже знакомы с основными тригонометрическими функциями и умеете строить графики тригонометрических уравнений, описывающих гармонические колебания.
При гармонических колебаниях маятника его смещение изменяется по гармоническому закону, поэтому не трудно доказать, что его скорость и ускорение также изменяются по гармоническому закону. Предположим, что смещение изменяется по закону косинуса и начальная фаза равна нулю

Так как скорость является первой производной смещения (координат) по времени, то:


Как видно из выражения (4.23), скорость, изменяющаяся по гармоническому закону, опережает колебания смещения по фазе на  (а).
(а).
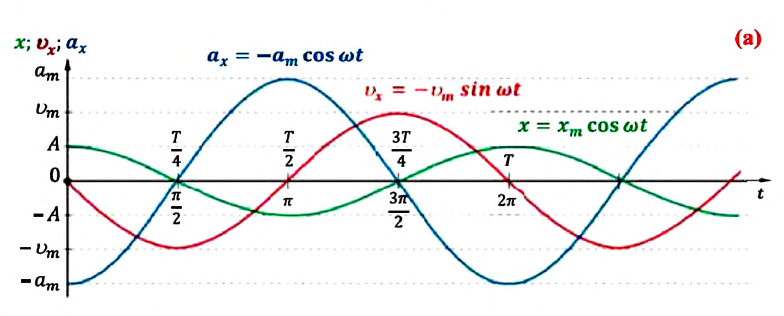
Максимальное (амплитудное) значение скорости зависит от амплитуды, частоты и периода колебаний:

Так как ускорение является первой производной скорости по времени, то получим:


Как видим, колебания ускорения, изменяющегося по гармоническому закону, опережают колебания скорости по фазе на  а колебания смещения на
а колебания смещения на
 (см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:
(см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:

Превращения энергии при гармонических колебаниях
Теоретический материал
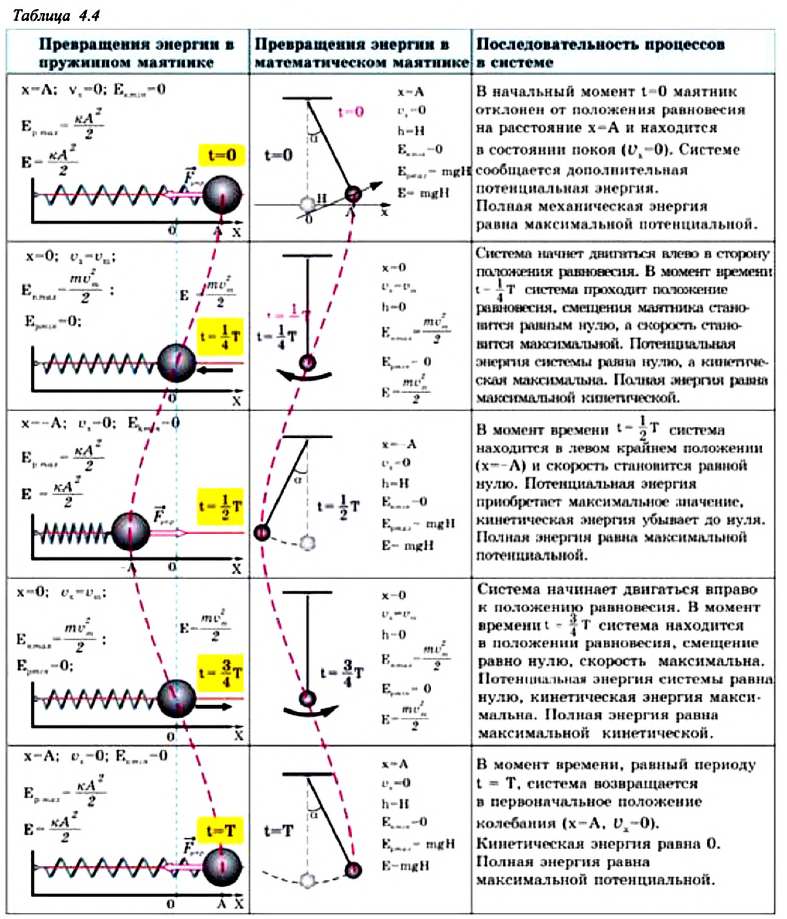
Потенциальная и кинетическая энергия свободных гармонических колебаний в замкнутой системе периодически превращаются друг в друга.
В таблице 4.4 дано сравнение превращений энергий в пружинном и математическом маятниках. Как видно из таблицы, потенциальная энергия колебательной системы в точке возвращения  имеет максимальное значение:
имеет максимальное значение:
Если же маятник находится в точке равновесия, потенциальная энергия минимальна:

Кинетическая энергия системы, наоборот, в точке возвращения минимальна  а в точке равновесия максимальна:
а в точке равновесия максимальна:
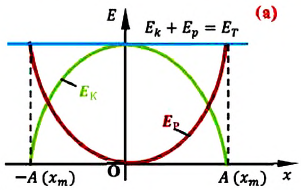
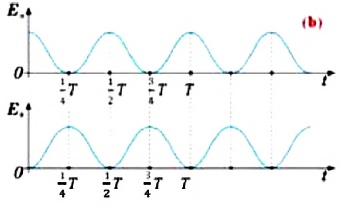
На рисунке (а) даны графики зависимости потенциальной и кинетической энергии при гармоническом колебательном движении от смещения.
Полная механическая энергия замкнутой колебательной системы в произвольный момент времени  остается постоянной (трение не учитывается):
остается постоянной (трение не учитывается):
a) для пружинного маятника:
b) для математического маятника:
Если принять во внимание изменение смещения и скорости по гармоническому закону в формулах потенциальной и кинетической энергии колебательного движения, то станет очевидно, что при гармонических колебаниях эти энергии так же изменяются по гармоническому закону (b):

Как было отмечено выше, полная энергия системы не изменяется по гармоническому закону:

• Полная энергия гармонических колебаний прямо пропорциональна квадрату амплитуды колебаний.
Если же в системе существует сила трения, то его полная энергия не сохраняется — изменение полной механической энергии равно работе силы трения. В результате колебания затухают: 
Превращения энергии при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол а (рис. 7), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

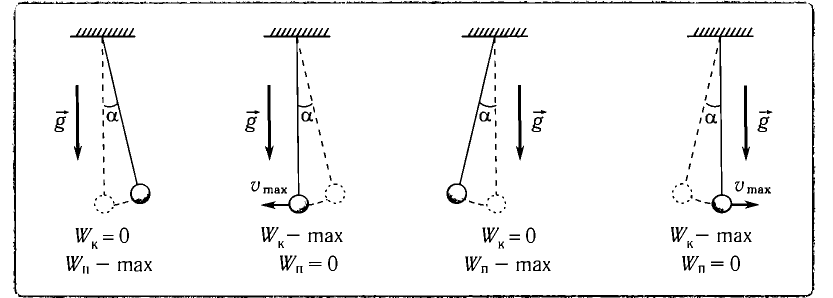
Рис. 7. Превращения энергии при колебаниях математического маятника
Поскольку при прохождении положения равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:
Из закона сохранения механической энергии следует (рис. 8), что
 (1)
(1)
Отсюда найдем модуль максимальной скорости маятника:
 (2)
(2)
Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
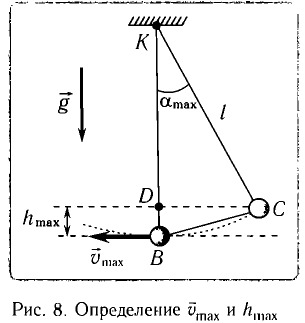
Если колебания малые, то  Из треугольника KCD на рисунке 8 находим
Из треугольника KCD на рисунке 8 находим


Подставив выражение для в формулу I (2), получим
Подставляя выражения для  и в соотношение (1), находим
и в соотношение (1), находим

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении

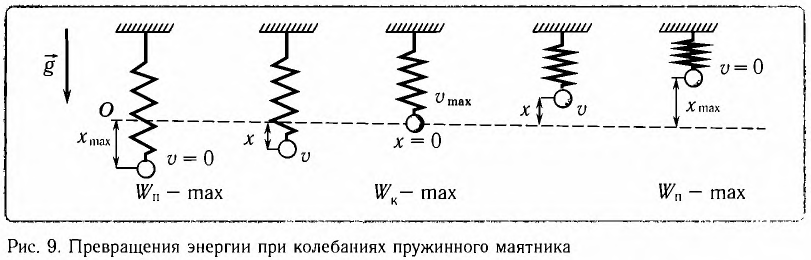
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 9). В крайних точках, когда координата груза принимает значение  , модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
, модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда x = 0, вся энергия осциллятора переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В промежуточных точках полная механическая энергия

Отсюда можно вывести выражение для модуля скорости  груза в точке с
груза в точке с
Так как 
Энергия при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергии. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силой трения пренебрегают, то его механическая энергия сохраняется. Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

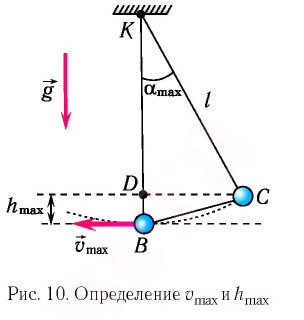
Поскольку при прохождении положения равновесия потенциальная энергия равна нулю  то из закона сохранения механической энергии следует (см. рис. 10), что
то из закона сохранения механической энергии следует (см. рис. 10), что  т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
Запишем закон сохранения механической энергии, подставив в него выражения для потенциальной и кинетической энергии:

Отсюда найдем модуль максимальной скорости маятника:
Высоту  можно выразить через длину
можно выразить через длину  маятника и амплитуду
маятника и амплитуду  колебаний. Если колебания малые, то
колебаний. Если колебания малые, то  Из
Из  (см. рис. 10) находим:
(см. рис. 10) находим: 
или 
Подставив выражение (3) для  в формулу (2), получим:
в формулу (2), получим: 
Подставляя выражения (3) для  и (4) для
и (4) для  в соотношение (1), находим:
в соотношение (1), находим:

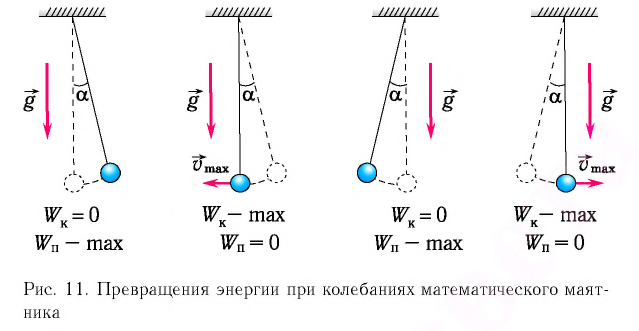
Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную (рис. 11). В любом промежуточном положении 
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 12).
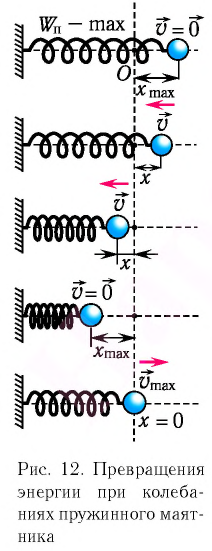
В крайних положениях, когда  модуль скорости маятника
модуль скорости маятника  и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, из соотношения (6) следует, что механическая энергия пружинного маятника пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда  вся энергия пружинного маятника переходит в кинетическую энергию груза:
вся энергия пружинного маятника переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В положениях между крайними точками полная энергия

С учетом выражений для координаты  и проекции скорости груза
и проекции скорости груза  а также для
а также для  находим его потенциальную энергию
находим его потенциальную энергию  и кинетическую энергию
и кинетическую энергию  в произвольный момент времени
в произвольный момент времени
Тогда полная механическая энергия пружинного маятника в этот же. момент времени есть величина постоянная и равная:
Таким образом, начальное смещение  определяет начальную потенциальную, а начальная скорость
определяет начальную потенциальную, а начальная скорость  определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
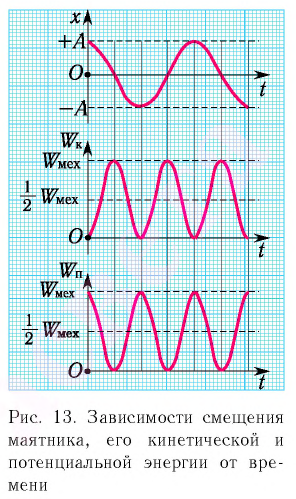
Заметим, что частота периодических изменений кинетической (потенциальной) энергии колеблющегося тела в два раза больше частоты колебаний маятника. Действительно, дважды за период механическая энергия тела будет полностью превращаться в потенциальную (в двух крайних положениях маятника) и дважды за период — в кинетическую (при его прохождении через положение равновесия) (рис. 13).
Пример №1
Математический маятник при колебаниях от одного крайнего положения до другого смещается на расстояние  см и при прохождении положения равновесия достигает скорости, модуль которой
см и при прохождении положения равновесия достигает скорости, модуль которой  Определите период
Определите период  колебании маятника.
колебании маятника.
Дано:

Решение
По закону сохранения механической энергии


Ответ: 
Пример №2
Груз массой  г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью
г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью  Его смешают на расстояние
Его смешают на расстояние  см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой
см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой  Определите потенциальную
Определите потенциальную  и кинетическую
и кинетическую  энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
энергию груза в начальный момент времени. Запишите кинематический закон движения груза.

Решение Потенциальная энергия груза: 
Кинетическая энергия груза: 
Начальное смещение груза не является амплитудой, так как вместе с начальным отклонением грузу сообщили и скорость. Однако полная энергия может быть выражена через амплитуду колебаний:

Отсюда 
Циклическая частота: 
В начальный момент времени  координата груза
координата груза  Отсюда начальная фаза:
Отсюда начальная фаза: 
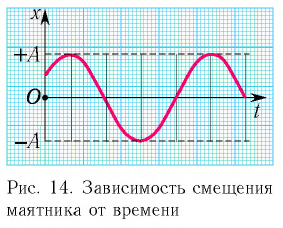
Тогда закон гармонических колебаний имеет вид (рис. 14):

Ответ: 

| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Вынужденные колебания в физике
- Электромагнитные колебания
- Свободные и вынужденные колебания в физике
- Вынужденные электромагнитные колебания
- Закон Архимеда
- Движение жидкостей
- Уравнение Бернулли
- Механические колебания и волны в физике
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Идеальный гармонический осциллятор. Уравнение идеального осциллятора и его решение. Амплитуда, частота и фаза колебаний
КОЛЕБАНИЯ. ВОЛНЫ. ОПТИКА
КОЛЕБАНИЯ
Лекция 1
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
Идеальный гармонический осциллятор. Уравнение идеального осциллятора и его решение. Амплитуда, частота и фаза колебаний
Колебание – один из самых распространённых процессов в природе и технике. Колебания – это процессы, повторяющиеся во времени. Колеблются высотные здания и высоковольтные провода под действием ветра, маятник заведённых часов и автомобиль на рессорах во время движения, уровень реки в течение года и температура человеческого тела при болезни. Звук – это колебания давления воздуха, радиоволны – периодические изменения напряжённости электрического и магнитного поля, свет – это тоже электромагнитные колебания. Землетрясения – колебания почвы, приливы и отливы – изменение уровней морей и океанов, вызываемые притяжением луны и т.д.
Колебания бывают механические, электромагнитные, химические, термодинамические и др. Несмотря на такое многообразие, все колебания описываются одними и теми же дифференциальными уравнениями.
Первыми учёными, изучавшими колебания, были Галилео Галилей и Христиан Гюйгенс. Галилей установил независимость периода колебаний от амплитуды. Гюйгенс изобрёл часы с маятником.
Любая система, которая, будучи слегка выведена из положения равновесия, совершает устойчивые колебания, называется гармоническим осциллятором. В классической физике такими системами являются математический маятник в пределах малых углов отклонения, груз в пределах малых амплитуд колебаний, электрический контур, состоящий из линейных элементов ёмкости и индуктивности.
Гармонический осциллятор можно считать линейным, если смещение от положения равновесия прямо пропорционально возмущающей силе. Частота колебаний гармонического осциллятора не зависит от амплитуды. Для осциллятора выполняется принцип суперпозиции — если действуют несколько возмущающих сил, то эффект их суммарного действия может быть получен как результат сложения эффектов от действующих сил в отдельности.
 Гармонические колебания описываются уравнением (рис.1.1.1)
Гармонические колебания описываются уравнением (рис.1.1.1)
 (1.1.1)
(1.1.1)
где х -смещение колеблющейся величины от положения равновесия, А – амплитуда колебаний, равная величине максимального смещения,  — фаза колебаний, определяющая смещение в момент времени
— фаза колебаний, определяющая смещение в момент времени  ,
,  — начальная фаза, определяющая величину смещения
— начальная фаза, определяющая величину смещения  в начальный момент времени,
в начальный момент времени,  — циклическая частота колебаний.
— циклическая частота колебаний.
Время одного полного колебания называется периодом,  , где
, где  — число колебаний, совершенных за время .
— число колебаний, совершенных за время .
Частота колебаний  определяет число колебаний, совершаемых в единицу времени, она связана с циклической частотой соотношением
определяет число колебаний, совершаемых в единицу времени, она связана с циклической частотой соотношением  , тогда период
, тогда период  .
.
Скорость колеблющейся материальной точки
 ,
,
 . (1.1.2)
. (1.1.2)
Таким образом, скорость и ускорение гармонического осциллятора также изменяются по гармоническому закону с амплитудами  и
и  соответственно. При этом скорость опережает по фазе смещение на
соответственно. При этом скорость опережает по фазе смещение на  , а ускорение – на
, а ускорение – на  (рис.1.1.2).
(рис.1.1.2).
 Из сопоставления уравнений движения гармонического осциллятора (1.1.1) и (1.1.2) следует, что
Из сопоставления уравнений движения гармонического осциллятора (1.1.1) и (1.1.2) следует, что  , или
, или
 . (1.1.3)
. (1.1.3)
Это дифференциальное уравнение второго порядка называется уравнением гармонического осциллятора. Его решение содержит два постоянные а и , которые определяются заданием начальных условий
 .
.
Отсюда  .
.
Если периодически повторяющийся процесс описывается уравнениями, не совпадающими с (1.1.1), он н6азывается ангармоническим. Система, совершающая ангармонические колебания, называется ангармоническим осциллятором.
1.1.2. Свободные колебания систем с одной степенью свободы. Комплексная форма представления гармонических колебаний
В природе очень распространены малые колебания, которые система совершает вблизи своего положения равновесия. Если система, выведенная из положения равновесия, предоставлена себе, то есть на неё не действуют внешние силы, то такая система будет совершать свободные незатухающие колебания. Рассмотрим систему с одной степенью свободы.
Устойчивому равновесию соответствует такое положение системы, в котором её потенциальная энергия  имеет минимум (q – обобщённая координата системы). Отклонение системы от положения равновесия приводит к возникновению силы
имеет минимум (q – обобщённая координата системы). Отклонение системы от положения равновесия приводит к возникновению силы  , которая стремится вернуть систему обратно. Значение обобщённой координаты, соответствующей положению равновесия, обозначим
, которая стремится вернуть систему обратно. Значение обобщённой координаты, соответствующей положению равновесия, обозначим  , тогда отклонение от положения равновесия
, тогда отклонение от положения равновесия 
Будем отсчитывать потенциальную энергию от минимального значения  . Примем
. Примем  Полученную функцию разложим в ряд Маклорена и оставим первый член разложения, имеем: о
Полученную функцию разложим в ряд Маклорена и оставим первый член разложения, имеем: о
 ,
,
где  . Тогда с учётом введённых обозначений:
. Тогда с учётом введённых обозначений:
 , (1.1.4)
, (1.1.4)
С учётом выражения (1.1.4) для силы, действующей на систему, получаем:

Согласно второму закону Ньютона, уравнение движения системы имеет вид:  ,
,
 , (1.1.5)
, (1.1.5)
Выражений (1.1.5) совпадает с уравнением (1.1.3) свободных гармонических колебаний при условии, что
 , (1.1.6)
, (1.1.6)
и имеет два независимых решения:  и
и  , так что общее решение:
, так что общее решение:
 , или
, или
,
где 
Из формулы (1.1.6) следует, что частота определяется только собственными свойствами механической системы и не зависит от амплитуды и от начальных условий движения.
Зависимость координаты колеблющейся системы от времени можно определить в виде вещественной части комплексного выражения  , где A=Xe-iα– комплексная амплитуда, её модуль совпадает с обычной амплитудой, а аргумент – с начальной фазой.
, где A=Xe-iα– комплексная амплитуда, её модуль совпадает с обычной амплитудой, а аргумент – с начальной фазой.

1.1.3. Примеры колебательных движений различной физической природы
Колебания груза на пружине
Рассмотрим колебания груза на пружине, при условии, что пружина не деформирована за пределы упругости. Покажем, что такой груз будет совершать гармонические колебания относительно положения равновесия (рис.1.1.3). Действительно, согласно закону Гука, сжатая или растянутая пружина создаёт гармоническую силу:

где  – коэффициент жёсткости пружины, – координата положения равновесия, х – координата груза (материальной точки) в момент времени ,
– коэффициент жёсткости пружины, – координата положения равновесия, х – координата груза (материальной точки) в момент времени ,  — смещение от положения равновесия.
— смещение от положения равновесия.
Поместим начало отсчета координаты в положение равновесия системы. В этом случае  .
.
 Если пружину растянуть на величину х, после чего отпустить в момент времени t=0, то уравнение движения груза согласно второму закону Ньютона примет вид -kx =ma, или
Если пружину растянуть на величину х, после чего отпустить в момент времени t=0, то уравнение движения груза согласно второму закону Ньютона примет вид -kx =ma, или  , и
, и
 (1.1.6)
(1.1.6)
Это уравнение совпадает по виду с уравнением движения (1.1.3) системы, совершающей гармонические колебания, его решение будем искать в виде:
 . (1.1.7)
. (1.1.7)
Подставим (1.17) в (1.1.6), имеем:  то есть выражение (1.1.7) является решением уравнения (1.1.6) при условии, что
то есть выражение (1.1.7) является решением уравнения (1.1.6) при условии, что 
Если в начальный момент времени положение груза было произвольным, то уравнение движения примет вид:
.
Рассмотрим, как меняется энергия груза, совершающего гармонические колебания в отсутствие внешних сил (рис.1.14). Если в момент времени t=0 грузу сообщить смещение х=А, то его полная энергия станет равной потенциальной энергии деформированной пружины  , кинетическая энергия равна нулю (точка 1).
, кинетическая энергия равна нулю (точка 1).
 На груз действует сила F= -kx, стремящаяся вернуть его в положение равновесия, поэтому груз движется с ускорением и увеличивает свою скорость, а, следовательно, и кинетическую энергию. Эта сила сокращает смещение груза х, потенциальная энергия груза убывает, переходя в кинетическую. Система «груз — пружина» замкнутая, поэтому её полная энергия сохраняется, то есть:
На груз действует сила F= -kx, стремящаяся вернуть его в положение равновесия, поэтому груз движется с ускорением и увеличивает свою скорость, а, следовательно, и кинетическую энергию. Эта сила сокращает смещение груза х, потенциальная энергия груза убывает, переходя в кинетическую. Система «груз — пружина» замкнутая, поэтому её полная энергия сохраняется, то есть:
 . (1.1.8)
. (1.1.8)
В момент времени  груз находится в положении равновесия (точка 2), его потенциальная энергия равна нулю, а кинетическая максимальна
груз находится в положении равновесия (точка 2), его потенциальная энергия равна нулю, а кинетическая максимальна  . Максимальную скорость груза найдём из закона сохранения энергии (1.1.8):
. Максимальную скорость груза найдём из закона сохранения энергии (1.1.8):

За счёт запаса кинетической энергии груз совершает работу против упругой силы –  и пролетает положение равновесия. Кинетическая энергия постепенно переходит в потенциальную. При
и пролетает положение равновесия. Кинетическая энергия постепенно переходит в потенциальную. При  груз имеет максимальное отрицательное смещение –А, кинетическая энергия Wk=0, груз останавливается и начинает движение к положению равновесия под действием упругой силы F= -kx. Далее движение происходит аналогично.
груз имеет максимальное отрицательное смещение –А, кинетическая энергия Wk=0, груз останавливается и начинает движение к положению равновесия под действием упругой силы F= -kx. Далее движение происходит аналогично.
Маятники
Под маятником понимают твёрдое тело, которое совершает под действием силы тяжести колебания вокруг неподвижной точки или оси. Различают физический и математический маятники.
Математический маятник – это идеализированная система, состоящая из невесомой нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной материальной точке.
 Математическим маятником, например, является шарик на длинной тонкой нити.
Математическим маятником, например, является шарик на длинной тонкой нити.
Отклонение маятника от положения равновесия характеризуется углом φ, который образует нить с вертикалью (рис.1.15). При отклонении маятника от положения равновесия возникает момент внешних сил (силы тяжести)  :
:  , где m – масса,
, где m – масса,  – длина маятника
– длина маятника
Этот момент стремится вернуть маятник в положение равновесия (аналогично квазиупругой силе) и направлен противоположно смещению φ, поэтому в формуле стоит знак «минус».
Уравнение динамики вращательного движения для маятника имеет вид: Iε= ,
 .
.
Будем рассматривать случай малых колебаний, поэтому sin φ ≈φ, обозначим  ,
,
имеем:  , или
, или  , и окончательно
, и окончательно
 .
.
Это уравнение гармонических колебаний, его решение:
 .
.
Частота колебаний математического маятника определяется только его длиной и ускорением силы тяжести, и не зависит от массы маятника. Период равен:
 .
.
Если колеблющееся тело нельзя представить, как материальную точку, то маятник называют физическим (рис.1.1.6). Уравнение его движения запишем в виде:

 .
.
В случае малых колебаний  , или
, или  =0 , где
=0 , где  . Это уравнение движения тела, совершающего гармонические колебания. Частота колебаний физического маятника зависит от его массы, длины и момента инерции относительно оси, проходящей через точку подвеса.
. Это уравнение движения тела, совершающего гармонические колебания. Частота колебаний физического маятника зависит от его массы, длины и момента инерции относительно оси, проходящей через точку подвеса.
Обозначим  . Величина
. Величина  называется приведённой длинной физического маятника. Это длина математического маятника, период колебаний которого совпадает с периодом данного физического маятника. Точка на прямой, соединяющей точку подвеса с центром масс, лежащая на расстоянии приведённой длины от оси вращения, называется центром качания физического маятника (О’). Если маятник подвесить в центре качания, то приведённая длина и период колебаний будут теми же, что и в точке О. Таким образом, точка подвеса и центр качания обладают свойствами взаимности: при переносе точки подвеса в центр качения прежняя точка подвеса становится новым центром качения.
называется приведённой длинной физического маятника. Это длина математического маятника, период колебаний которого совпадает с периодом данного физического маятника. Точка на прямой, соединяющей точку подвеса с центром масс, лежащая на расстоянии приведённой длины от оси вращения, называется центром качания физического маятника (О’). Если маятник подвесить в центре качания, то приведённая длина и период колебаний будут теми же, что и в точке О. Таким образом, точка подвеса и центр качания обладают свойствами взаимности: при переносе точки подвеса в центр качения прежняя точка подвеса становится новым центром качения.
Математический маятник, который качается с таким же периодом, как и рассматриваемый физический, называется изохронным данному физическому маятнику.
 1.1.4. Сложение колебаний (биения, фигуры Лиссажу). Векторное описание сложения колебаний
1.1.4. Сложение колебаний (биения, фигуры Лиссажу). Векторное описание сложения колебаний
Сложение одинаково направленных колебаний можно производить методом векторных диаграмм. Любое гармоническое колебание можно представить в виде вектора следующим образом. Выберем ось х с началом отсчета в точке О (рис.1.1.7)
Из точки О построим вектор  , который составляет угол с осью х. Пусть этот вектор поворачивается с угловой скоростью
, который составляет угол с осью х. Пусть этот вектор поворачивается с угловой скоростью  . Проекция вектора на ось Х равна:
. Проекция вектора на ось Х равна:

то есть она совершает гармонические колебания с амплитудой а.
 Рассмотрим два гармонических колебания одинакового направления и одинаковой циклической малой , заданные векторами
Рассмотрим два гармонических колебания одинакового направления и одинаковой циклической малой , заданные векторами  и
и  . Смещения по оси Х равны:
. Смещения по оси Х равны:


результирующий вектор имеет проекцию  и представляет собой результирующее колебание (рис.1.1.8), по теореме косинусов
и представляет собой результирующее колебание (рис.1.1.8), по теореме косинусов  Таким образом, сложение гармонических колебаний производится сложением векторов.
Таким образом, сложение гармонических колебаний производится сложением векторов.
Проведем сложение взаимно перпендикулярных колебаний. Пусть материальная точка совершает два взаимно перпендикулярных колебания частотой :


 .
.
Сама материальная точка при этом будет двигаться по некоторой криволинейной траектории.
Из уравнения движения следует:  ,
,
 . (1.1.9)
. (1.1.9)
Из уравнения (1.1.9) можно получить уравнение эллипса (рис.1.1.9):

Рассмотрим частные случаи этого уравнения:

 1. Разность фаз колебаний α= 0. При этом
1. Разность фаз колебаний α= 0. При этом  т.е.
т.е.  или
или  Это уравнение прямой, и результирующее колебание происходит вдоль этой прямой с амплитудой
Это уравнение прямой, и результирующее колебание происходит вдоль этой прямой с амплитудой  (рис.1.1.10).
(рис.1.1.10).
2. Если разность фаз  то уравнение (1.1.9) переходит в уравнение эллипса, приведенного к координатным осям,
то уравнение (1.1.9) переходит в уравнение эллипса, приведенного к координатным осям,  При
При  материальная точка движется по окружности, уравнение которой
материальная точка движется по окружности, уравнение которой  (рис.1.1.11).
(рис.1.1.11).
3. Если частоты колебаний неодинаковы, то материальная точка описывает фигуры Лиссажу (рис.1112).
Рассмотрим сложение колебаний одного направления, частоты которых мало отличаются друг от друга. В этом случае результирующее движение можно рассматривать как гармоническое колебание с пульсирующей амплитудой. Такие колебания называются биениями.
Пусть частота одного колебания  , второго
, второго  . Амплитуды обоих колебаний одинаковы и равны а. Начальные фазы равны нулю. В таком случае уравнения колебаний имеют вид:
. Амплитуды обоих колебаний одинаковы и равны а. Начальные фазы равны нулю. В таком случае уравнения колебаний имеют вид:

Сложим эти выражения:
 (1.1.10)
(1.1.10)
 График функции х(t) представлен на рис. 1.1.13. Множитель
График функции х(t) представлен на рис. 1.1.13. Множитель  меняется гораздо медленнее, чем
меняется гораздо медленнее, чем  , поэтому (1.1.10) можно рассматривать как гармоническое колебание частоты , амплитуда которого меняется по некоторому периодическому закону
, поэтому (1.1.10) можно рассматривать как гармоническое колебание частоты , амплитуда которого меняется по некоторому периодическому закону
Частота изменения амплитуды – частота биений – равна разности частот складываемых колебаний  .
.
Энергия колебаний
Смещение колеблющейся точки от положения равновесия, описывается уравнением:
 ее ускорение равно второй производной от смещения по времени
ее ускорение равно второй производной от смещения по времени  тогда сила, действующая на колеблющуюся точку, по второму закону Ньютона равна
тогда сила, действующая на колеблющуюся точку, по второму закону Ньютона равна

— то есть сила пропорциональна смещению х и направлена против смещения к положению равновесия. Эта сила называется возвращающей силой. В случае груза на пружине возвращающей силой является сила упругости, в случае математического маятника – составляющая силы тяжести.
Возвращающая сила по характеру подчиняется закону Гука F= -kx, где 
– коэффициент возвращающей силы. Тогда потенциальная энергия колеблющейся точки равна:

(постоянную интегрирования выбирают равной нулю, чтобы при х=0 энергия Wn=0).

где  , тогда
, тогда 
 Полная механическая энергия равна сумме кинетической и потенциальной энергий,
Полная механическая энергия равна сумме кинетической и потенциальной энергий,  и в случае свободных колебаний без трения сохраняется (рис.1.1.15). Когда материальная точка совершает колебания, кинетическая энергия переходит в потенциальную, и наоборот. В крайних точках (х = ±А) скорость
и в случае свободных колебаний без трения сохраняется (рис.1.1.15). Когда материальная точка совершает колебания, кинетическая энергия переходит в потенциальную, и наоборот. В крайних точках (х = ±А) скорость  , кинетическая энергия равна нулю, и полная энергия равна потенциальной:
, кинетическая энергия равна нулю, и полная энергия равна потенциальной:

Таким образом, полная механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия (х=0) потенциальная энергия переходит в кинетическую:

В промежуточных точках полная энергия равна

а скорость 
 На рисунке 1.1.16 приведена кривая потенциальной энергии
На рисунке 1.1.16 приведена кривая потенциальной энергии  , горизонтальная линия соответствует полной энергии. Расстояние от этой линии до кривой равно кинетической энергии. Движение ограничено значениями х, заключёнными в пределах от –А до +А.
, горизонтальная линия соответствует полной энергии. Расстояние от этой линии до кривой равно кинетической энергии. Движение ограничено значениями х, заключёнными в пределах от –А до +А.
Средние за период значения кинетической и потенциальной энергии одинаковы и равны  , так что средняя полная энергия системы равна полной энергии системы ( средние значения
, так что средняя полная энергия системы равна полной энергии системы ( средние значения  ).
).
АНГАРМОНИЧЕСКИЙ ОСЦИЛЛЯТОР
http://www.evkova.org/garmonicheskie-kolebaniya-v-fizike
http://allrefrs.ru/3-11150.html