Регулирование скорости гидропривода
При эксплуатации гидрофицированных машин, станков и механизмов возникает естественная необходимость в регулировании скорости выходного звена гидропривода. Известно, что эта скорость (угловая – вала гидромотора или линейная — штока гидроцилиндра) зависит от расхода подаваемой в гидродвигатель рабочей жидкости.
В зависимости от способа изменения этого расхода различают объемное и дроссельное регулирование. Тот и другой способы регулирования не зависят от кинематического признака гидропривода, но зависят от других факторов, в частности, от характера изменения нагрузки, выходной скорости гидродвигателя; определяются они и экономическими соображениями.
Рассмотрим объемный способ регулирования применительно к гидроприводу вращательного движения, а дроссельный – применительно к гидроприводу возвратно–поступательного движения.
Объемное регулирование
Расчетную частоту вращения вала гидромотора n2 определяют из условий равенства подачи насоса Q1 и расхода жидкости гидромотора Q2, т.е. Q1=Q2 или W1·n1=W2·n2, откуда
 ,
,
где W1, W2 – рабочие объемы соответственно насоса и гидромотора.
Частота вращения вала насоса n1 постоянна для гидроприводов с объемным регулированием, т.к. эта частота номинальна для приводящего двигателя, при которой к.п.д. двигателя будет максимальным.
Следовательно, регулирование частоты вращения гидромотора возможно тремя способами: изменением рабочего объема насоса (рис.13.10), гидромотора (рис. 13.11) или одновременно насоса и гидромотора (рис.13.12).

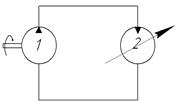

Рис.13.10 Рис.13.11 Рис.13.12
Первый способ применяют в гидроприводах поступательного, поворотного и вращательного движения, второй и третий – только в гидроприводах вращательного движения.
гидропривод с регулируемым насосом и нерегулируемым гидромотором является самым распространенным видом объемного регулирования (рис.13.10). Принцип работы гидропривода заключается в следующем. При включении приводящего двигателя насос 1 нагнетает рабочую жидкость по напорной линии в гидромотор 2, вал которого под действием крутящего момента вращается в определенном направлении. Из гидромотора 2 рабочая жидкость по сливной линии снова поступает в насос. Давление в гидросистеме р1 зависит от нагрузки гидромотора:
 ,
,
где М2 – крутящий момент гидромотора, Н·м; W2 – рабочий объем гидромотора, м 3 ; ртр – потери давления в гидролиниях, Па.
Частоту вращения гидромотора регулируют, изменяя рабочий объем насоса, а направление вращения вала гидромотора изменяют благодаря реверсированию потока рабочей жидкости, создаваемого насосом. При этом сначала подачу насоса уменьшают до нуля, а затем увеличивают, но в противоположном направлении. В результате функции гидролиний меняются: сливная становится напорной, напорная – сливной.
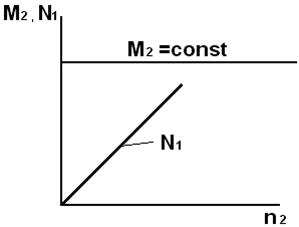
На рис.13.13 показаны характеристики такого гидропривода с учетом следующих условий: n1=const; W2=const; p2=const. Основные параметры гидропривода определяют по следующим формулам:

гидропривод с регулируемым гидромотором и нерегулируемым насосом(рис.13.11) применяют значительно реже по сравнению с гидроприводами, которые имеют регулируемые насосы. На рис.13.14 показаны характеристики такого гидропривода с учетом следующих условий: n1=const; W1=const; р2= const. Основные параметры гидропривода определяют по формулам

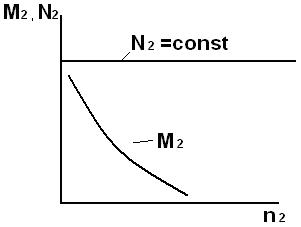
Частота вращения гидромотора изменяется в рассматриваемом гидроприводе обратно пропорционально рабочему объему гидромотора. Например, чтобы увеличить частоту вращения гидромотора, необходимо уменьшить его рабочий объем (при этом уменьшается его крутящий момент). Теоретическая мощность привода (без учета потерь) в данном гидроприводе является постоянной. К недостаткам такого привода следует отнести сложность управления гидромоторами в случае их значительного удаления от операторов и ограничение минимального рабочего объема гидромотора, при котором момент, развиваемый гидромотором, становится равным или меньше момента внутреннего трения (самоторможение).
Гидропривод с регулируемым насосом и гидромотором.Для такого привода (рис.13.12) характерен больший диапазон регулирования частоты вращения и момента, развиваемого гидромотором. Обеспечение характеристики М2=f(n2), как показано на рис. 13.15, дает возможность использовать этот гидропривод в транспортных средствах, где необходимо осуществлять трогание машины с моментом Mmax при очень малой скорости (n2≈0). По мере разгона момент должен снижаться, а частота вращения увеличиваться. Это достигается уменьшением (регулированием) рабочего объема гидромотора. Применение регулируемого насоса увеличивает диапазон регулируемого привода, но из-за сложности двойного регулирования такой гидропривод пока не нашел широкого применения.
Дроссельное регулирование
Дросселем называют гидравлическое сопротивление, которое устанавливают для регулирования потока жидкости, следовательно, и скорости выходного звена гидропривода. Конструкции дросселей будут рассмотрены ниже.
Скорость перемещения поршня в цилиндре или частоту вращения вала гидромотора можно регулировать, изменяя сопротивление дросселя.
В зависимости от места установки дросселя в схеме гидропривода по отношению к гидродвигателю различают три способа дроссельного регулирования:

— дроссель «на входе» (рис.13.16);
— дроссель «на выходе» (рис.13.17);
— дроссель «на ответвлении» (рис.13.18).

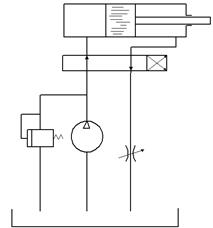

Рис.13.16 Рис.13.17 Рис. 13.18
дроссельные устройства.По конструкции дроссели подразделяются на нерегулируемые (обозначение  ) и регулируемые (обозначение
) и регулируемые (обозначение  ), а по виду гидравлических потерь в дросселях — на линейные и нелинейные.
), а по виду гидравлических потерь в дросселях — на линейные и нелинейные.
В линейных дросселях движению жидкости препятствует сопротивление трения жидкости о стенки канала. Для получения больших сопротивлений сечение канала уменьшают, а длину увеличивают. В дросселях такого типа устанавливается ламинарный режим движения жидкости, при котором перепад давления прямо пропорционален первой степени скорости или расхода и может быть вычислен по формуле
 ,
,
где d – диаметр, например, капилляра;  — коэффициент динамической вязкости; l — длина;
— коэффициент динамической вязкости; l — длина;  — перепад давления на дросселе.
— перепад давления на дросселе.
Примером линейного нерегулируемого дросселя может служить, капилляр. встроенный в основной трубопровод (рис.13.19). Для увеличения расхода устанавливают пакет капилляров (рис.13.20).


Примером линейного регулируемого дросселя может служить пробка с винтовой нарезкой, помещенной в хорошо пригнанный по наружному диаметру корпус (рис.13.21). Длину нарезки можно менять, следовательно, будет меняться и расход через дроссель.

Следует отметить нестабильность работы системы с линейным дросселем, так как его сопротивление зависит от вязкости жидкости, которая изменяется с изменением температуры.
В нелинейных дросселях широко используют местные сопротивления в виде диафрагм и насадков. В дросселях такого типа устанавливается турбулентный режим движения жидкости, при котором перепад давлений пропорционален второй степени скорости или расхода; последний может быть вычислен по формуле
 ,
,
где — коэффициент расхода;  — площадь отверстия дросселя; — перепад давления на дросселе.
— площадь отверстия дросселя; — перепад давления на дросселе.
Примером нелинейного нерегулируемого дросселя является калиброванное отверстие (диафрагма) 1, установленное в основной поток жидкости (рис.13.22), или пакет пластичных дросселей.

Примерами нелинейных нерегулируемых дросселей могут быть золотники и краны различных конструкций (рис.13.23).

Так как в нелинейном дросселе потери энергии связаны с отрывом потока и вихреобразованиями, а потери от трения минимальны, то гидравлическое сопротивление такого дросселя практически не зависит от вязкости жидкости и изменения температуры. Нелинейные дроссели обеспечивают стабильность характеристики Q=f(Δp) в большом диапазоне чисел Re.
анализ работы гидропривода с дроссельным регулированием.В системах дроссельного регулирования характерным условием является неравенство
 ,
,
а применительно к гидроприводу поступательного движения
 (13.2)
(13.2)
где Qн – подача насоса;  — эффективная площадь гидроцилиндра; V max — максимальная скорость штока гидроцилиндра.
— эффективная площадь гидроцилиндра; V max — максимальная скорость штока гидроцилиндра.
При таком условии избыточная часть жидкости от насоса отводится через переливной клапан в гидроемкость не выполнив никакой работы.
Система с дросселем «на входе» (рис.13.24).

В гидросистеме между насосом 1 и гидрораспределителем 3 установлен дроссель А, от настройки которого зависит скорость поршня в цилиндре 4. если сохранено условие (13.2), то избыток жидкости отводится через переливной клапан 2, при этом в нагнетательной полости насоса и перед дросселем удерживается постоянное давление, соответствующее настройке клапана 2.
Рассмотрим работу этой системы и выясним, как влияет на скорость поршня изменение полезной нагрузки Р при неизменной настройке дросселя.
Допустим, что поршень со штоком перемещается вправо. Давление рабочей жидкости в левой полости обозначим рраб, в правой – рпр (противодавление), силу трения – Т, полезную нагрузку – Р.
Составим уравнение равновесия поршня силового цилиндра:
 .
.
В этом уравнении силу трения Т и силу от противодавления можно принять постоянными.
Следовательно, если изменится внешняя нагрузка Р, то должно измениться давление pраб. Так как дроссель А установлен последовательно к гидроцилиндру, то Qдр = Qгц. Расход, например, через нелинейный дроссель
 ;
;
 .
.
Так как рп.к.= const, то расход через дроссель, следовательно, и скорость поршня гидроцилиндра будут меняться с изменением внешней нагрузки Р.
Система с дросселем на входе допускает регулирование скорости гидродвигателя только в том случае, если направление действия нагрузки не совпадает с направлением движения выходного звена. Действительно, если нагрузка направлена в ту же сторону, что и движение выходного звена системы, то при уменьшении подачи жидкости через дроссель поршень может перемещаться быстрее, чем будет заполняться полость цилиндра. Произойдет разрыв потока в магистрали перед поршнем.
Кроме того, например, в грузоподъемных машинах поднятый груз при опускании может упасть, так как внешняя нагрузка – груз – будет преодолевать при опускании только силу трения поршня о цилиндр и противодавление в сливной линии. Поэтому для стабилизации сил трения на сливной магистрали устанавливается подпорный клапан 5 (или демпфер), создающий противодавление рпр в нерабочей полости цилиндра. Давление подпора не должно быть больше 0,2…0,3 МПа.
Система с дросселем на выходе. В гидравлической системе (рис.13.25) дроссель В подключен на сливной магистрали после распределителя 3. скорость поршня здесь определяется объемом жидкости, который вытесняется из штоковой полости цилиндра 4 через дроссель В в гидроемкость.
Проанализируем работу этой системы и установим влияние изменения нагрузки Р на скорость поршня.
Составим уравнение равновесия поршня силового цилиндра:
 .
.
Если сохраняется условие, при котором  >
>  , то давление рраб в процессе не изменяется и соответствует настройке переливного клапана 2 рп.к, т.е.
, то давление рраб в процессе не изменяется и соответствует настройке переливного клапана 2 рп.к, т.е.  . Силы трения Т для данного механизма почти неизменны. Так как по условию нагрузки Р величина переменная, то из уравнения равновесия следует, что противодавление рпр тоже будет переменным.
. Силы трения Т для данного механизма почти неизменны. Так как по условию нагрузки Р величина переменная, то из уравнения равновесия следует, что противодавление рпр тоже будет переменным.
Давление перед дросселем «В» при некотором допущении может быть принято равным рпр, а после дросселя – почти атмосферному рат. Поэтому перепад давления в дросселе  при подключении последнего на выходе является величиной переменной. Следовательно, переменным будет расход жидкости через дроссель и скорость поршня.
при подключении последнего на выходе является величиной переменной. Следовательно, переменным будет расход жидкости через дроссель и скорость поршня.
Система с дросселем «на выходе» более предпочтительна, чем система с дросселем «на входе». Во-первых, тепло, выделяющееся при прохождении через дроссель, отводится в гидроемкость, не нагревая гидродвигатель. Во-вторых, эту систему целесообразно, применять в монтажных механизмах, т.к. перекрывая дроссель В, можно мгновенно останавливать в нужном положении поднятый груз.
В рассмотренных выше системах дроссельного регулирования мощность, потребляемая насосом, постоянна и независима от внешней (полезной) нагрузки Р.
Система с дросселем на ответвлении.Рассмотрим третий возможный способ подключения дросселя в систему – на ответвлении (рис.13.26).
Поток жидкости, идущий от насоса 1, разделяется по двум направлениям: к гидроцилиндру 4 через распределитель 3 и через дроссель С, который установлен в ответвлении параллельно силовому цилиндру. Скорость поршня как и в предыдущих системах, определяется настройкой дросселя С.

При закрытом дросселе скорость поршня максимальна. По мере открытия его часть жидкости начинает циркулировать в гидроемкость, а скорость поршня соответственно уменьшается. Если при полном открытии дросселя сопротивление, оказываемое им и магистралью после дросселя, меньше, чем в цилиндропоршневой группе и подпорном клапане 5, то вся жидкость от насоса будет отводиться через дроссель в гидроемкость, а поршень остановится.
При указанном расположении золотника в распределителе 3 к насосу подключена поршневая полость гидроцилиндра 4, давление в которой рраб определяется нагрузкой Р+Т. Если нагрузка в процессе работы изменяется, то перепад давления в дросселе зависит от нагрузки. Следовательно, расход жидкости через дроссель и скорость выходного звена меняются.
Клапан 2 в системе включается в работу эпизодически в момент перегрузок, выполняя, таким образом, только функцию предохранительного устройства.
Мощность, потребляемая насосом, и давление в полости нагнетания пропорциональны полезной нагрузке, поэтому гидросистема с дросселем, установленным параллельно силовому цилиндру, экономичней систем с дросселем «на входе» и «на выходе», так как к.п.д. ее выше.
Из анализа работы гидравлических систем с дроссельным способом регулирования скорости следует, что независимо от места расположения дросселя не обеспечивается постоянство скорости поршня при неизменной настройке дросселя, если нагрузка в процессе работы изменяется. Объясняется это нестабильным перепадом давления в дросселе.
Поэтому напрашивается само собой устройство, в котором автоматически поддерживался бы постоянным перепад давления на дросселе с изменением нагрузки на выходном звене. Такое устройство называется дроссель-регулятором. Этот аппарат состоит из дросселя и редукционного клапана, размещенных в общем корпусе. Расход жидкости устанавливается дросселем, а постоянство разности давления до и после дросселя обеспечивается автоматически редукционным клапаном.
Следящий гидропривод
В рассмотренном ранее гидроприводе возвратно–поступательного движения происходит простое перемещение поршня из одного крайнего положения в другое с преодолением нагрузки Р вдоль штока.
В тракторных, автомобильных системах управления, в гидрокопировальных станках и системах гидроавтоматики применяют следящие гидроприводы (бустеры), в которых шток силового цилиндра должен автоматически следовать за перемещением рукоятки управления.
В таких следящих системах исполнительный шток развивает большее усилие, чем приложено к органу управления. Поэтому следящий гидроприводов еще называют гидроусилителем.
Рассмотрим принцип действия такого привода (рис.13.27) золотникового типа.

Двигая ручку управления 1, например, вправо, мы перемещаем командный золотник 2, который через золотниковые окна и каналы 3 (гибкие шланги) направляет жидкость под давлением в левую полость силового цилиндра 4 и соединяет со сливом правую его полость. Под действием давления, создаваемого насосом, поршень 5 перемещается вправо вместе с корпусом золотника 6 до тех пор, пока не перекроются каналы золотника, по которым жидкость подается в цилиндр и отводится от него.
При перемещении ручки с золотником влево давление будет подведено в правую полость цилиндра, и поршень будет перемещаться влево.
Таким образом, исполнительный шток 7, связанный, например, с рулевой тягой трактора, следует за всеми движениями золотника 2, но развиваемое им усилие во много раз превышает то, которое прикладывается к золотнику.
Рассмотрим теперь основные характеристики гидроусилителя как силового привода. Выведем формулы для усилия на исполнительном штоке гидроусилителя, к.п.д. гидроусилителя и развиваемой им мощности.
Давление, подведенное к гидроусилителю ро, расходуется на преодоление усилия вдоль исполнительного штока и на гидравлическое сопротивление:
 ,
,
где  ,
,  — перепад давления в гидроцилиндре;
— перепад давления в гидроцилиндре;
 ,
,
где Р – усилие на штоке;  — площадь поршня, за вычетом площади штока;
— площадь поршня, за вычетом площади штока;  — суммарная потеря давления на пути движения жидкости от входа в гидроусилитель до выхода.
— суммарная потеря давления на пути движения жидкости от входа в гидроусилитель до выхода.
Гидравлические потери происходят в основном в двух частично перекрытых золотниковых окнах и подчиняются квадратичному закону в функции скорости (расхода):
 ,
,
где  — коэффициент сопротивления золотникового окна; V – скорость течения жидкости в золотниковом окне.
— коэффициент сопротивления золотникового окна; V – скорость течения жидкости в золотниковом окне.
Считая окно прямоугольным, шириной в, получим уравнение расхода
 ,
,
где V – скорость перемещения поршня гидроцилиндра.
 , (13.3)
, (13.3)
где  .
.
Величину К можно принять постоянной.
Считая давление насоса постоянным и пренебрегая потерями в подводящих трубах, получим
 .
.
При отсутствии нагрузки (Р=0,  ) и полном открытии окон (х=хmax) определим К из выражения (13.3)
) и полном открытии окон (х=хmax) определим К из выражения (13.3)
 . (13.4)
. (13.4)
Подставив (13.4) в (13.3) и решив относительно  , получим
, получим

где  ;
;  ;
;  ;
;  — степень открытия золотниковых окон;
— степень открытия золотниковых окон;  — относительный расход (скорость).
— относительный расход (скорость).
Сила исполнительного штока (нагрузка)
 .
.
 .
.
Полученное уравнение позволяет построить сетку так называемых статических характеристик гидроусилителя, т.е.  для разных значений .
для разных значений .
График (рис.13.28) построен для положительных и отрицательных значений  , т.е. для движения золотника и штока, следовательно, и жидкости как в одном, так и в другом направлении.
, т.е. для движения золотника и штока, следовательно, и жидкости как в одном, так и в другом направлении.

Из графика видно, что лишь при малых скоростях V перемещения исполнительного штока усилие на нем приближается к максимально возможному значению:  . Чем быстрее перемещается исполнительный шток, тем меньшую нагрузку он преодолевает.
. Чем быстрее перемещается исполнительный шток, тем меньшую нагрузку он преодолевает.
Там, где кривые пересекают ось абсцисс, нагрузка на штоке меняет свой знак, т.е. превращается в силу, тянущую шток в направлении движения. При этом происходит дальнейшее увеличение его скорости, а гидроцилиндр переходит в режим насоса.
Таким образом, на графике (рис.13.28) в квадрантах I и III гидроцилиндр работает в режиме гидродвигателя, совершающего работу преодоления нагрузки, а в квадрантах II и IV – в режиме насоса, нагнетающего жидкость в том же направлении, что и основной насос.
Статические характеристики гидроусилителя можно построить и в другой системе координат (рис.13.29).
Решим уравнение  относительно
относительно  :
:

и построим зависимость  для разных значений
для разных значений  . Мы получим ряд прямых, угол наклона которых к оси
. Мы получим ряд прямых, угол наклона которых к оси  тем меньше, чем больше нагрузка на исполнительном штоке. При
тем меньше, чем больше нагрузка на исполнительном штоке. При  характеристика гидроусилителя совпадает с осью абсцисс, а это значит, что скорость исполнительного штока равна нулю.
характеристика гидроусилителя совпадает с осью абсцисс, а это значит, что скорость исполнительного штока равна нулю.

На характеристики гидроусилителя влияет так называемое перекрытие золотника, т.е. соотношение ширины золотникового поршня h к ширине золотникового окна t (рис.13.30).
В связи с этим различают идеальный золотник, у которого h=t, золотник с положительным перекрытием h>t, золотник с отрицательным перекрытием h
Дроссельное регулирование гидропривода при параллельном включении дросселя


Дроссельное регулирование гидропривода при параллельном включении дросселя
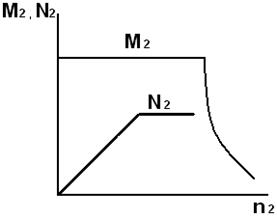
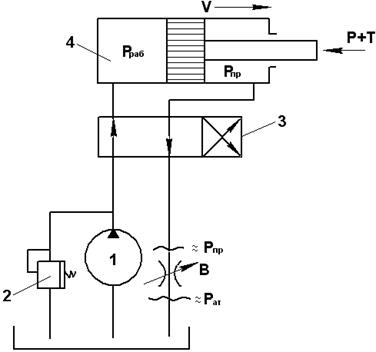
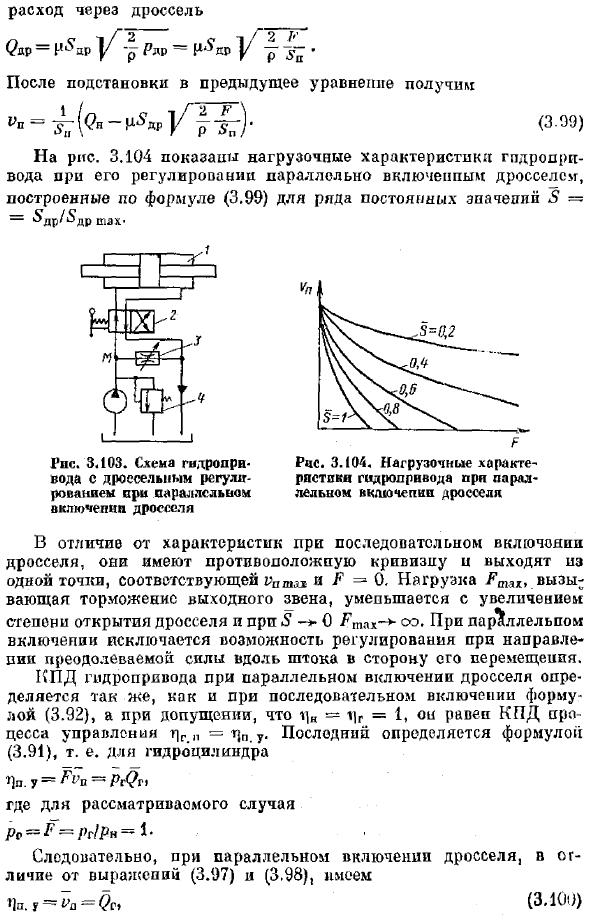
Дроссельное регулирование гидропривода при параллельном включении дросселя. Рисунок 3. 103-это фигура объемного гидропривода, когда управляющий дроссель включается параллельно с гидравлическим приводом. motor. In точка м, поток рабочей жидкости расходится. Через распределитель 2 1 звук направляется в гидроцилиндр 2, еще 1 звук направляется в управляющий дроссель 3.Клапан 4 в этом случае является safe. It открывается только при чрезмерно повышенном давлении в системе. Скорость выходного звена блока, являющегося штоком цилиндра, регулируется изменением открытия дроссельной заслонки.
В отличие от характеристики, когда дроссель соединен последовательно, дроссель имеет противоположную кривизну и выходит из 1 точки, соответствующей ups и P = 0. Людмила Фирмаль
- Чем меньше расход насоса, тем больше скорость np направляется в гидроцилиндр. Когда дроссель полностью закрыт, скорость np максимизируется. Когда дроссель полностью открыт, скорость поршня уменьшается до нуля или минимального значения, в зависимости от нагрузки/нагрузки В случае параллельных дроссельных соединений, при условии отсутствия потери давления между распределителем и гидравлической опорой* фи-0?, 〜\ФДР> РН-Пр-Ор = Е / ЗН、 2-е уравнение описывается на основе эквивалентности потерь давления в параллельных трубопроводах. Скорость поршня: =Фг / * ^ л » (фифдр)/ ^п> т.
- Дроссельный поток (?д-р-а ^ д-р РДР Подставляя предыдущее уравнение, получаем 1’n = ^-(0?Н ^ Д ’ | / / Г-(399) Рисунок 3.104 показаны нагрузочные характеристики гидропривода при управлении параллельно дроссельной заслонкой. Построен по формуле (3.99) для некоторого постоянного значения 3= ^ д ^ д-р Макс 0 Открытие дроссельной заслонки и 5 0 ^sh * ^ co, параллельно по формуле (3.92).
Включение исключает возможность регулировки при ударе силы в направлении ее движения вдоль штока, а КПД гидропривода при параллельном включении дросселя определяется как в случае последовательного включения. Людмила Фирмаль
- Последнее определяется по формуле (3.91).То есть, для гидроцилиндра%Г. г = п & п-пр @ Г1 В случае возникновения проблем ПК = п = ПГ / П ^ 1、 Так, в отличие от формул (3.97) и (3.98), если дроссель подключен параллельно、 СР −1 $а =(3.100) Алу. Уд. 1?Л Р1а Х В 0?П Где-относительная скорость поршня? Так, в данном случае КПД% процесса управления однозначно определяется относительным расходом жидкости через дроссель, или дроссельным отверстием m / nu = 1-5″.
Смотрите также:
Возможно эти страницы вам будут полезны:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Переходные процессы в гидро — и пневмоприводах
Системы с гидро — и пневмоприводами во время эксплуатации подвергаются как управляющим, так и возмущающим воздействиям, в результате которых происходят изменения состояния систем во времени. В реальных условиях воздействия на систему чаще всего бывают случайными, вызывая в системе случайные или стохастические процессы. На практике сведения о характеристиках случайных воздействий на системы с гидро — и пневмоприводами, как и на многие другие технические системы, обычно крайне ограничены, поэтому при исследованиях динамических свойств систем широко применяют так называемые детерминированные воздействия. Типовыми детерминированными воздействиями являются: ступенчатое, импульсное и гармоническое. При последнем виде воздействия рассматривают поведение системы в частотной области сигналов, в которой достаточно эффективно можно решать задачи устойчивости систем, а также исследовать влияние различных факторов на динамические характеристики отдельных элементов и систем в целом.
В частотной области сигналов хорошо сочетаются рассчитанные по математическим моделям характеристики части устройств исследуемой системы с экспериментальными характеристиками тех устройств, для которых по каким-либо причинам математические модели не могли быть составлены. Благодаря отмеченным достоинствам методы исследований и расчетов систем в частотной области сигналов широко используют на практике. Однако если при гармонических воздействиях сравнительно просто провести испытания отдельных устройств и какой-то части системы, то натурные испытания систем, содержащих сложные объекты (энергетические установки, летательные аппараты, строительно-дорожные машины), далеко не всегда осуществимы.
В связи с чем наряду с частотными методами не менее широко применяют методы исследований и расчетов систем во временной области. При этом определяют переходные процессы, вызванные в системах ступенчатыми или импульсными воздействиями. Первые из них проще воспроизвести в реальных условиях, что облегчает проверку адекватности рассчитанных и полученных в результате физических экспериментов переходных процессов. К тому же процессы при ступенчатом воздействии на систему дают достаточно наглядное представление о таких динамических свойствах систем, как быстродействие, колебательность и продолжительность процесса.
Если линейная математическая модель системы в необходимой мере отражает динамику реальной системы, то по переходным процессам при ступенчатых воздействиях можно вычислить переходные процессы при импульсных воздействиях,
А также найти те и другие по частотным характеристикам системы.
При наличии в системе существенно нелинейных звеньев такой пересчет процессов будет приближенным и не исключает получения неверных результатов.
На рис. 6.16 изображены основные виды переходных процессов, вызванных ступенчатыми воздействиями на систему, математическая модель которой близка к линейной. Переходный процесс 1 называют колебательным, переходный процесс 2 — монотоннным, переходный процесс 3 — апериодическим. В устойчивой системе, описываемой линейным дифференциальным уравнением, выходная величина у приближается к своему установившемуся значению уж при оо, поэтому продолжительность переходного процесса оценивают по значению времени оо можно вычислить по изображению Р(з) при 5 —► 0 с помощью равенства пределов
Нш /( 0 будет приближаться к апериодическому звену первого порядка, а не к интегрирующему звену. В этом случае установившаяся ошибка определяется соотношением
Где К — коэффициент усиления всего разомкнутого контура привода, не содержащего интегрирующее звено.
В соответствии с формулой (6.120) для уменьшения установившейся ошибки в конце переходного процесса, вызванного ступенчатым воздействием, необходимо увеличивать коэффициент усиления разомкнутого контура. Однако, как и в предыдущем случае, такое увеличение коэффициента усиления свыше определенного значения нарушает условие устойчивости привода.
Выбор параметров и расчет переходных процессов
При проектировании систем с гидро — и пневмоприводами необходимо выполнять противоречащие друг другу условия, по которым для обеспечения высокого быстродействия и малых установившихся ошибок следует увеличивать коэффициент усиления разомкнутого контура привода, а для сохранения устойчивости системы — не превышать допустимых для этого коэффициента значений.
Параметры привода, удовлетворяющие указанным условиям, предварительно можно выбрать с помощью ЛАХ и ЛФХ разомкнутого контура так, чтобы обеспечивались рекомендуемые запасы по фазе и амплитуде (см. § 6.1).
Если наибольшая из постоянных времени управляющей части привода на порядок меньше любой из постоянных времени силовой части, то для приближенного выбора параметров привода можно воспользоваться графиками, разделяющими плоскость коэффициентов характеристического уравнения, записанного в предложенной И. А. Вышнеградским форме. Эти графики приведены на рис. 6.18.
Параметры А и В являются коэффициентами уравнения
И 2 И 5 6 7 6 9 10 11А Рис. в.18. Области параметров системы третьего порядка при различных видах переходных процессов
В которое можно преобразовать характеристическое уравнение рассматриваемой системы
Аз А3 а>22 И — а^А -1- ао = 0, (6.121)
Вводя новую переменную
И используя соотношения
Формулы (6.122) и (6.123) позволяют найти по параметрам А и В, которые соответствуют указанным на графиках переходным процессам, значения двух коэффициентов характеристического уравнения (6.121) при известном третьем коэффициенте.
Например, в случае следящего гидромеханического привода с дроссельным регулированием, для которого были получены характеристическое уравнение (6.12) и условие устойчивости (6.14), формулы (6.122) и (6.123) имеют вид

По соотношениям (6.124) и (6.125) можно, выбрав параметры А и Б с учетом требуемого переходного процесса и вычислив по формуле (5.27) постоянную времени Тц, найти коэффициент £ц относительного демпфирования и добротность Бт гидропривода. Затем с помощью формул (5.29) и (6.15) можно рассчитать коэффициенты линеаризованной расходно — перепадной характеристики золотникового устройства, а по ним получить его основные размеры. Коэффициент Кос обратной связи обычно известен заранее, так как от него зависит перемещение выходного звена привода, которое вызывает заданное значение входного сигнала.
В современных методах теории управления для расчетов на ЭВМ переходных процессов применяют различные программы. Одни из таких программ основаны на математических моделях, представленных в виде уравнений вход-выход, другие — на математических моделях, описывающих рассматриваемые системы в переменных состояния. Первого вида программы обычно предусматривают использование структурных схем как линейных, так и нелинейных систем, причем в обоих случаях все переменные являются функциями времени, а не их изображениями по Лапласу. В связи с чем величина
5, которая в передаточных функциях звеньев таких структурных схем уже не является переменной в преобразовании Лапласа, должна рассматриваться как оператор дифференцирования, т. е. в = р1 (см. гл. 4).
Очень важно также иметь в виду, что при расчете по линейным математическим моделям входные воздействия не должны превышать те значения, при которых какая-либо из переменных может быть реально осуществимой в данной системе. Это условие необходимо учитывать особенно в тех случаях, когда при расчете используются размерные значения переменных. В случае применения безразмерных переменных и
правильном выборе базовых величин при нормировании уравнений данное условие автоматически выполняется.
Для примера перейдем к безразмерным переменным в математической модели электрогидравлического следящего привода, структурную схему которого получим, объединив структурные схемы силовой части гидропривода с дроссельным регулированием (см. рис. 5.3, а) и электрогидравлического усилителя (см. рис. 5.10). В результате будем иметь структурную схему, изображенную на рис. 6.19, где Кп, ос — коэффициент преобразователя сигналов обратной связи от выходного звена (перемещение штока гидроцилиндра) к входу электронного усилителя с коэффициентом Кус.
http://lfirmal.com/drosselnoe-regulirovanie-gidroprivoda-pri-parallelnom-vklyuchenii-drosselya/
http://msd.com.ua/mexanika-gidro-i-pnevmoprivodov/perexodnye-processy-v-gidro-i-pnevmoprivodax/