Токарно-винторезного станка модели 1К62
Уравнение кинематического баланса цепи главного движения станка модели 1К62 (см. п/п. 3.4.3 и рис. 3.11) для правого вращения может быть представлено в следующем виде:

1) По кинематической схеме и уравнению кинематического баланса можно заключить, что коробка скоростей (КС) имеет сложенную структуру на 30 вариантов частот вращения шпинделя, состоящую из двух кинематических цепей передач, одна из которых (обозначим в соответствии с изложенным в п/п. 3.9.6.4 zo·zт) предназначена для получения низших, а другая (zo·zc) – высших скоростей привода;
2) Решение уравнения кинематического баланса показывает, что КС обеспечивает следующие частоты вращения шпинделя (рассчитанные значения частот округлены до стандартных значений чисел геометрического ряда), об/мин:
| 12,5 – | 16 – | 20 – | 25 – | 31,5 – | 40 – |
| 50 – | 63 – | 80 – | 100 – | 125 – | 160 – |
| к а ж д а я ч а с т о та п о л у ч а е т с я д в а ж д ы | |||||
| 200 – | 250 – | 315 – | 400 – | 500 – | 630– дважды |
| 800 – | 1000 – | 1250 – | 1600 – |
Как видно, фактическое число различных значений частот вращения шпинделя (zф = 23) меньше структурного числа вариантов (z = 30), так как несколько частот (7) повторяется. Таким образом, в КС имеет место перекрытие части ступеней скорости;
3) Знаменатель геометрического ряда частот вращения шпинделя равен:
4) Знаменатели рядов передаточных отношений в группах передач pа, pб, pв, pг, составляющих общую и тихоходную части привода zo·zт, и порядок переключения групп будут следующими:
| Группы | Взаимосвязь i в группах передач | Значения знаменателей групп | Порядок переключения групп | Характеристики групп |
| pа=2 |  |  | pо (основная гр.) | xо = 1 |
| pб=3 |  |  | pI (I множительн.) | xI = 2 |
| pв=2 |  |  | pII (II множительн.) | xII = 6 |
| pг=2 |  |  | pIII (III множительн.) | xIII = 6 |
Развёрнутая структурная формула кинематической цепи для низших скоростей привода будет: zo·zт= pа·pб·pв·pг= 2(1)·3(2)·2(6)·2(6);
5) Как видно, характеристика последней множительной группы (6) меньше расчётного значения (12) и цепь zo·zт является структурой с перекрытием, которая обеспечивает

Кинематической цепью для высших скоростей обеспечивается zo·zc= 6 вариантов. Однако же суммарное число различных частот вращения шпинделя не 18+6=24, а 23. Это имеет место потому, что первая цепь обеспечивает частоты n1-n18, а вторая – n18-n23, а не n19-n24, т.е. ещё две частоты (630 об/мин) повторяются. Общая часть слагаемых структур – zo= 6 = 2(1)·3(2); 6) На основании полученных данных можно построить структурную сетку привода (рис. У.16); 7) Сложенная структура с перекрытием привода главного движения станка модели 1К62 обеспечивает диапазон регулирования при zф = 23 и  = 1,26 Д = 2000/12,5 = 160. Нормальная множительная структура на 24 варианта обеспечивала бы Д = 1,12 24–1 = 14 (т.к. 2(1)·3(2)·2(6)·2(12) = 24 и = 1,26 Д = 2000/12,5 = 160. Нормальная множительная структура на 24 варианта обеспечивала бы Д = 1,12 24–1 = 14 (т.к. 2(1)·3(2)·2(6)·2(12) = 24 и  ). ). | 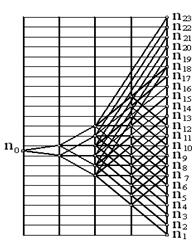 Рис. У.16. Структурная сетка привода главного движения станка модели 1К62 Рис. У.16. Структурная сетка привода главного движения станка модели 1К62 |
Дата добавления: 2016-07-09 ; просмотров: 2777 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Курсач. Кинематический расчёт привода
| Название | Кинематический расчёт привода |
| Дата | 26.07.2021 |
| Размер | 269.92 Kb. |
| Формат файла |  |
| Имя файла | Курсач.docx |
| Тип | Документы #225410 |
| страница | 3 из 8 |
 С этим файлом связано 4 файл(ов). Среди них: lab5OTC.doc, task_283704 сопромт.docx, task_289566.pdf, KOMPAS — АД.cdw.pdf. Показать все связанные файлы Подборка по базе: Инструкция по расчету лимита дз.doc, Страницы из расчетная часть терминал СПГ.pdf, Мой курсач.doc, сережа курсач инфа.docx, Упругие свойства горных пород; характеристики распространенных п, stud41 Практическая часть Организация безналичных расчетов.docx, Пример расчета трансформатора.docx, прак.раб Расчет себестоимости по видам (1).docx, ЭТС Курсач Леша.docx, Примеры расчётов.doc С этим файлом связано 4 файл(ов). Среди них: lab5OTC.doc, task_283704 сопромт.docx, task_289566.pdf, KOMPAS — АД.cdw.pdf. Показать все связанные файлы Подборка по базе: Инструкция по расчету лимита дз.doc, Страницы из расчетная часть терминал СПГ.pdf, Мой курсач.doc, сережа курсач инфа.docx, Упругие свойства горных пород; характеристики распространенных п, stud41 Практическая часть Организация безналичных расчетов.docx, Пример расчета трансформатора.docx, прак.раб Расчет себестоимости по видам (1).docx, ЭТС Курсач Леша.docx, Примеры расчётов.docСоставление уравнений кинематического балансаУравнения кинематического баланса представляют собой выражения, связывающие частоты вращения приводящего вала двигателя и приводимого шпинделя кинематическими передачами. Допустимая погрешность частот вращения шпинделя зависит от знаменателя геометрического ряда. [Δn] – допустимая погрешность частот вращения шпинделя. Δn – погрешность частот вращения шпинделя. i0 – передаточное отношение ремённой передачи. Учебное пособие: Изучение конструкций, кинематики и настройки сверлильных станков
Предназначены для выполнения тех же операций, что и вертикально-сверлильные станки, но для изготовления деталей больших размеров, как, например, корпусные детали. На рис.3 приведен внешний вид радиально-сверлильного станка мод. 2554. На фундаментной плите 1 установлена неподвижная колонна 2, на которую надета поворотная гильза 4. Последняя после поворота зажимается гидрозажимом 3 на колонне 2. На гильзе 3 имеются вертикальные направляющие, по которым перемещается траверса (рукав) 5. На траверсе смонтирована сверлильная головка 6, которая может перемещаться вдоль траверсы и поворачиваться вместе с ней и поворотной гильзой 3 на 360°. Обрабатываемая деталь устанавливается на подставке (столе) или непосредственно на фундаментной плите или на полу. Наибольший диаметр сверления 50 мм, вылет шпинделя 350…1600 мм, наибольшее вертикальное перемещение траверсы 1000 мм.
Сверлильная головка конструктивно выполнена, как и на вертикально-сверлильном станке, но имеет больше частот вращения и число подач, что позволяет применять наиболее рациональные режимы резания. Сосредоточение органов управления на сверлильной головке, наличие гидрозажима колонны, сблокированного с зажимом сверлильной головки, автоматизация зажима траверсы на колонне, наличие системы предохранительных устройств, исключающих поломку станка при перегрузке, позволяют максимально сократить вспомогательное время и обеспечить высокую производительность. Совмещение центров инструмента и обрабатываемого отверстия осуществляется поворотом траверсы и продольным перемещением сверлильной головки вдоль траверсы. После установки требуемой координаты сверлильная головка и колонна с траверсой закрепляются. Кинематическая схема станка мод. 2554 приведена на рис. 4.
Вращение шпинделю сообщается от электродвигателя М1 через постоянную зубчатую передачу 26-38. С первого вала коробки скоростей на второй вал передаются две прямые передачи при помощи двойного блока Со второго вала на третий движение сообщается посредством двойного блока Пятому валу сообщается с четвёртого вала два варианта передаточных отношений посредством двойного блока С пятого вала на шпиндель движение передаётся по двум вариантам: передача 50-28 и 13-65 (при включении шестерни 28 вниз в колесо с внутренним зацеплением 28, сцепляющего колесо 65 со Таким образом, коробка скоростей станка обеспечивает получение 32 передаточных отношений, но часть из них повторяется, поэтому реально используется 25 частот вращения, в пределах 18…2000 мин -1 . Уравнение кинематической цепи главного движения (вращения шпинделя) для максимальной частоты вращения будет: При выполнении лабораторной работы необходимо написать уравнение кинематического баланса цепи главного движения и рассчитать значения всех 25-ти частот шпинделя. Реверсирование вращения шпинделя осуществляется переключением двухсторонней фрикционной муфты М 1 . Осевое перемещение гильза шпинделя получает от шпинделя станка через зубчатые колёса 36-44, коробку подач и постоянные передачи. На первом валу коробки подач расположен тройной скользящий блок, сообщающий второму валу три варианта передаточных отношений: Тройной блок, расположенный на третьем валу, получает со второго вала три варианта передаточных отношений: 1) через перебор 2) смещением третьего блока вниз, когда шестерня 18 этого блока соединяется напрямую с колесом внутреннего зацепления 18, сблокированного с шестерней 49; 3) при среднем положении третьего блока через зацепление и далее Затем движение через червячную пару Таким образом, коробка подач позволяет получить 27 передаточных отношений, но часть из них повторяется, поэтому реально используется 21 число подач в пределах 0,05…5 мм/об. Муфта М 2 является предохранительной, она срабатывает при перегрузке, а также отключается при достижении заданной глубины сверления. Запишем уравнение кинематического баланса для минимальной подачи: При выполнении лабораторной работы необходимо написать уравнение кинематического баланса цепи подач и рассчитать значения всех подач. Гильза со шпинделем уравновешивается спиральными пружинами, которые регулируются вручную рукояткой 1 через червячную передачу z=1-80. Быстрое перемещение невращающегося шпинделя можно осуществлять маховичком 2. Штурвал 3 служит для быстрого ручного перемещения или грубой подачи шпинделя, а также для включения и выключения механической подачи. Перемещение сверлильной головки вдоль траверсы может осуществляться вручнуюмаховичком 4 или от гидромотора 5. Вертикальное перемещение траверсы осуществляется от электромотора М3. Муфта М6 предохранительная. Зажим сверлильной головки на траверсе и траверсы на гильзе осуществляется гидроцилиндрами через рычажные механизмы. Зажим гильзы на колонне осуществляется плунжером-рейкой и передачей винт-гайка (на схеме не показаны). На базе станка мод. 2554 выпускаются модернизированные станки мод. 2А554Е- передвижные на салазках; мод. 2554Р- передвижные по рельсам; мод. 2А557, 2А557Е, 2А557Р- с увеличенным вылетом шпинделя до 3150 мм; мод. 2А554Ф1- с автоматическим циклом и цифровой индикацией шпинделя и др. На базе станка мод. 2554 выпускается также координатно-сверлильный станок с ЧПУ мод. 2554Ф2. источники: http://topuch.ru/kinematicheskij-raschet-privoda/index3.html http://www.bestreferat.ru/referat-115640.html | ||||||

 .
.



 . С вала IIна вал IIIc помощью тройного 25-30-35 передаётся три варианта передаточных отношений. С вала III на вал IVcпомощью двойного блока 35-42. Между валами IVи Vпостоянная передача
. С вала IIна вал IIIc помощью тройного 25-30-35 передаётся три варианта передаточных отношений. С вала III на вал IVcпомощью двойного блока 35-42. Между валами IVи Vпостоянная передача  . С вала Vна шпиндель VIсообщается два варианта передаточных отношений.
. С вала Vна шпиндель VIсообщается два варианта передаточных отношений.



 или
или  (при верхнем включении фрикционной муфты М1 ) или обратное вращение по цепи
(при верхнем включении фрикционной муфты М1 ) или обратное вращение по цепи  (при нижнем включении муфты М1 ).
(при нижнем включении муфты М1 ). или
или  , а с третьего вала на четвёртый вращение передаётся посредством двойного блока
, а с третьего вала на четвёртый вращение передаётся посредством двойного блока  или
или  .
. или
или  .
. мин -1
мин -1
 или
или  или
или  .
. или
или  или
или  . Далее движение может передаваться по трем направлениям:
. Далее движение может передаваться по трем направлениям: ;
;
 .
. и реечную шестерню 13 передаётся рейке гильзы шпинделя.
и реечную шестерню 13 передаётся рейке гильзы шпинделя. мм/об
мм/об