Альбом кинематических схем токарно-винторезного станка 1К62
Содержание
Назначение токарно-винторезного станка 1к62 и общее устройство
Станок предназначен для выполнения разнообразных токарных работ и в том числе для нарезания различных резьб и используется главным образом в условиях единичного и мелкосерийного производства.
Технические характеристики, фотографии и чертежи приведены на странице Токарно-винторезный станок 1К62.
Конструкция и характеристика работы основных узлов станка

Общий вид и компоновка станка 1К62 (рис. 1)
Основные узлы станка: станина 13, которая служит для соединения между собой всех узлов станка; передняя бабка 2, в которой помещены шпиндель 4 станка и коробка скоростей; суппорт 11, на котором закрепляется режущий инструмент; задняя бабка 15; коробка подач 3, передающая вращение ходовому валику 24 и ходовому винту 23; шкаф 20 с электрооборудованием станка; тумбы 22 и 29.
Станина станка 13 (см. рис. 1, а) опирается на левую 29 и правую 22 тумбы, с которыми она жестко скреплена. В левой тумбе помещен электродвигатель главного привода станка. В правой тумбе помещен насос, подающий охлаждающую жидкость по шлангу на режущий инструмент. Во внутреннюю полость тумбы жидкость стекает из корыта 27. Наиболее точное положение подвижных узлов станка обеспечивается комбинированными направляющими станины — призматической а и плоской б (рис. 1, б).
Передняя бабка 2 закреплена болтами на левой стороне станины. Во внутренней части бабки помещены шпиндель 4 и коробка скоростей, сверху закрытая крышкой.
Через сквозное отверстие шпинделя 4 при необходимости можно пропускать обрабатываемый на станке пруток, а в коническое гнездо шпинделя устанавливать передний центр. На правом выступающем конце шпинделя имеются центрирующий поясок, буртик и резьба для точной центровки и крепления планшайбы с патроном 5, в кулачки которого устанавливают обрабатываемые заготовки.
Суппорт 11 предназначен для перемещения закрепленных на нем режущих инструментов и состоит из следующих основных частей: каретки 6, фартука 25, поперечных салазок 7, средней поворотной части 8, верхних салазок 10 и четырехместного резцедержателя 9 для установки и закрепления режущих инструментов.
Каретка 6 перемещается в продольном направлении по призматической а и плоской б направляющим (рис. 1, б). Планки 1 и 2 каретки скользят по нижним направляющим г и в. Перемещение каретки вручную в продольном направлении осуществляется вращением маховика 26 (рис. 1, а).
Фартук 25 жестко закреплен на каретке 6. В нем помещены механизмы, преобразующие вращательное движение ходового валика 24 и винта 23 в поступательное движение суппорта.
Для устранения люфта в винтовой передаче гайка винта состоит из двух частей, которые разводятся клином. Средняя часть 8 вместе с имеющимися на ней направляющими верхних салазок 10, которая может быть повернута относительно оси станка на угол и закреплена на поперечных салазках 7, предназначена для обработки конических поверхностей изделий.
Верхние салазки 10 предназначены для перемещения резца вручную при вращении рукоятки 12. Точный отсчет величины перемещения суппорта вручную производится по лимбам с ценой деления 0,05 мм
Коробка подач 3 служит для передачи вращения ходовому валику 24 либо ходовому винту 23. Коробка подач связана со шпинделем станка передачей, в которую входит и гитара сменных колес, расположенная под щитком 1.
Задняя бабка 15 предназначена для поддержки задним центром обрабатываемых заготовок или для установки и перемещения осевых инструментов. Основные части задней бабки: плита 17, корпус 16, пиноль 14, прижимная планка 1 (рис. 1, в).
Задняя бабка перемещается по призматической а и плоской б направляющим (рис. 1, в) станины станка. Перемещение производится либо вручную, либо с помощью суппорта — в случае соединения с ним задней бабки замком (рис. 1, г). Замок состоит из планки 2, прикрепленной к поперечным салазкам 1, суппорта и планки 4, соединенной с плитой 3 задней бабки. Подводя суппорт к задней бабке и перемещая салазки 1 в поперечном направлении, заводят выступ планки 2 за выступ планки 4. При этом задняя бабка соединяется с суппортом и вместе с ним будет перемещаться в продольном направлении от механизма подач.
Для того чтобы вершина заднего центра была точно расположена на оси станка, корпус 16 (рис. 1, а) перемещают в поперечном направлении относительно плиты 17. Для обработки конических поверхностей деталей задний центр смещают винтом 19 от оси станка в направлении «на себя» или «от себя». Пиноль 14 имеет коническое отверстие для установки заднего центра или осевых инструментов.
Электрооборудование станка расположено в шкафу 20. На передней стенке шкафа помещена панель 18 с амперметром, указывающим ток главного электродвигателя станка, и переключателями, включающими станок в электрическую сеть, освещение станка и электродвигатель насоса, подающего охлаждающую жидкость.
Под крышкой 21 расположен электродвигатель ускоренного перемещения суппорта.
Схема кинематическая токарно-винторезного станка 1К62
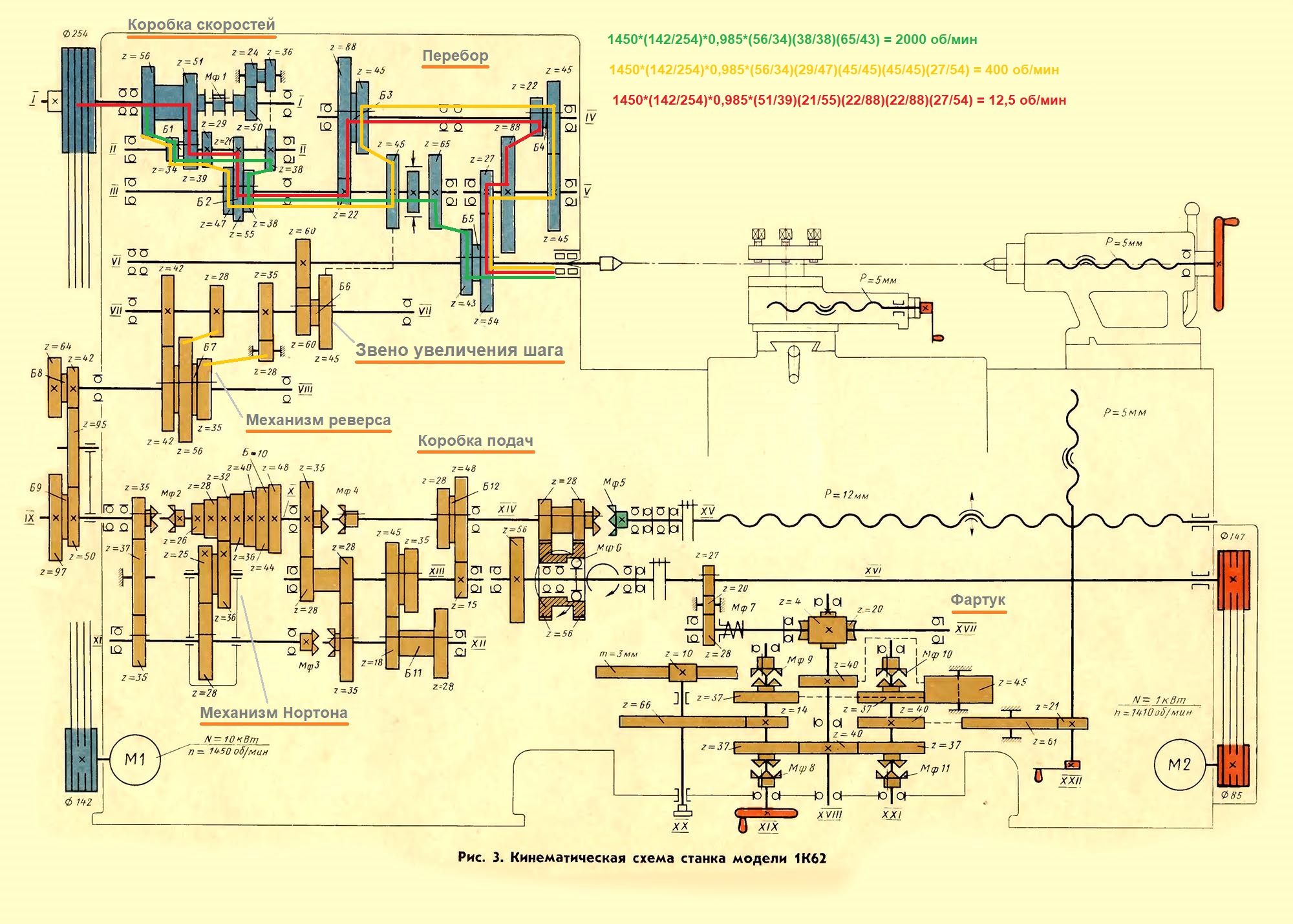
Кинематическая схема токарно-винторезного 1к62
Движения в станке: основные — главное движение, продольные и поперечные подачи суппорта; вспомогательные — быстрые перемещения суппорта, задней бабки и пиноли вручную.
Кинематическая цепь привода главного движения. Эта цепь обеспечивает передачу вращения от электродвигателя M1 шпинделю VI с возможностью включения разных частот его вращения (рис. 2). Шпиндель станка может иметь правое и левое направление вращения. При правом направлении вращения шпинделя уравнение баланса кинематической цепи привода главного движения запишется так (муфта Мф1 включена влево) (рис. 2, а):
Передняя бабка условно разделена на несколько частей (см.кинематическую схему):
- Фрикционный (входной) вал — фрикционный вал состоит из: двойной фрикционной муфты Мф1 с неподвижным двойным блоком (z=51, z=56), шестерни (z=50) и неподвижного блока реверса (z=24, z=36);
- Коробка скоростей — вал II с подвижным двойным блоком (Б1), вал III с подвижным тройным блоком (Б2);
- Перебор — вал IV с подвижными двойными блоками (Б3, Б4, Б5);
- Узел тормоза — ленточный тормоз на валу III;
- Шпиндель — с подвижным двойным блоком (Б5) включающем перебор и шестерней z=60 для передачи вращения на привод подач;
- Узел привода подач:
- Звено увеличения шага резьбы — блок Б6, обеспечивает увеличение выходной скорости по отношению к скорости шпинделя;
- Механизм реверса 2-х скоростной — блок Б7 служит для изменения направления движения суппорта.
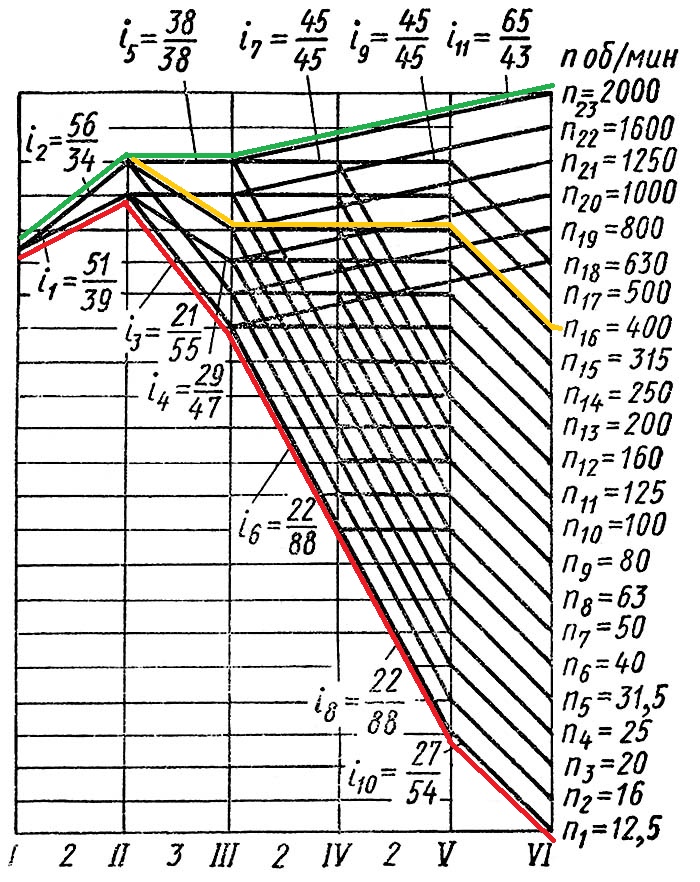
График оборотов токарно-винторезного станка 1к62
При прямом (правом) направлении вращения шпинделя уравнение баланса кинематической цепи привода главного движения запишется так (муфта Мф1 включена влево). Может быть настроено 24 частоты вращения в диапазоне 12,5..2000 об/мин (частота 630 об/мин повторяется).

Уравнение баланса прямого (правого) направления вращения шпинделя
При обратном (левом) направлении вращения шпинделя уравнение баланса кинематической цепи привода главного движения запишется так (муфта Мф1 включена влево). Может быть настроено 12 частот вращения в диапазоне 19..2420 об/мин.

Уравнение баланса обратного (левого) направления вращения шпинделя

Кинематическая цепь движения резания токарно-винторезного станка 1к62
1450 — число оборотов электродвигателя;
142/254 — передаточное отношение ременной передачи (отношение диаметров шкивов двигателя (Ø 142) и коробки скоростей (Ø 254));
0,985 — коэффициент упругого проскальзывания ременной передачи.
Движение подачи
Привод подач включает в себя следующие цепи и узлы (см.кинематическую схему):
- Звено увеличения шага резьбы — двойной блок Б6 в шпиндельной бабке, обеспечивает увеличение выходной частоты вращения по отношению к частоте вращения шпинделя в соотношении: 1:2, 1:8, 1:32
- Механизм реверса 2-х скоростной — тройной блок Б7 в шпиндельной бабке, служит для изменение направления движения суппорта при одном и том же направлении вращении шпинделя. Осуществляется подкючением промежуточной шестерни — трензеля;
- Гитара сменных колес — включает сменные шестерни K, L, M, N. Служит для сравнительно редкой перенастройки чисел оборотов;
- Коробка подач — коробка подач получает движение от шпиндельной бабки через гитару и задаёт различные скорости вращения ходового вала и ходового винта;
- Механизм подач фартука — преобразует вращение ходового вала или ходового винта в поступательное движение суппорта продольное или поперечное.

Коробка подач токарно-винторезного станка 1к62
Кинематическая цепь продольных подач суппорта
Продольное перемещение суппорта осуществляется следующим образом:
от шпинделя через передачу 60/60, далее через реверс с колесами 42/42 или 28/56 либо 35/28•28/35 и через гитару сменных колес 42/95•95/50 вращается вал IX коробки подач.
Подключив муфту, колесо МФ2 начинает вращать конус шестерен 26, 28, 32, 36, 40, 44, 48 и от него накидное колесо 36.
Далее через передачу и включенную муфту МФ3 вращается двойной блок z = 18 – z = 28, осуществляющий отношения 18/45 и 28/35, затем через двойной блок 15/48 и 35/28 и через передачу 28/56 вращается ходовой вал, по которому вместе с фартуком перемещается колесо z = 27.
Далее движение передается через передаточные отношения колес фартука 27/20 • 20/28 • 4/20 • 40/37 • 14/66 на реечное колесо z = 10 (модуль зацепления m = 3 мм). Колесо 10, находясь в зацеплении с рейкой, прикрепленной к станине, катится по ней и перемещает фартук с суппортом.
Включением муфт МФ8 или МФ9 колесо z = 14 вращается вправо или влево, меняя направление движения суппорта. Общее уравнение кинематической цепи продольных подач определяется исходя из расчетного периода одного оборота шпинделя:

Общее уравнение кинематической цепи продольных подач станка 1к62
Пределы величин продольных подач при включении соответствующих блоков составляют 0,07…0,13; 0,14…0,26; 0,28…0,52; 0,57…1,04; 1,14…2,08; 2,28…4,16 мм/об. Последняя группа подач получается включением звена увеличения шага резьбы.
Кинематическая цепь поперечных подач суппорта
До червячной передачи фартука кинематическая цепь не отличается от предыдущей цепи. Далее через колеса 40/37 или 40/45•45/37 включением муфт МФ10 или МФ11 и через передачи 40/61•61/20 вращается винт поперечной подачи суппорта. Шаг резьбы винта 5 мм, резьба левая. Уравнение кинематической цепи аналогичное, как и для продольных подач. Величины подач в 2 раза меньше соответствующих величин продольных и составляют от 0,035 до 2,08 мм/об.
Ручное продольное перемещение суппорта. Маховиком на валу XIX через передачу вращается реечное колесо z = 10. За один оборот маховика суппорт переместится на величину
1 • 14/66 • π • 10 • 3 = 20 мм
Кинематическая цепь для получения метрической резьбы
Органы настройки винторезной цепи должны быть рассчитаны и настроены таким образом, чтобы величина продольного перемещения суппорта на один оборот шпинделя в точности соответствовала шагу Т нарезаемой резьбы.
При нарезании резьбы для перемещения суппорта участвует ходовой винт с шагом 12 мм. Для этой цели блок колес z = 28 – z = 28 входит в зацепление с муфтой МФ5. Маточная гайка, замкнутая с винтом, перемещается вместе с фартуком и суппортом. Кинематическая цепь не отличается от цепи продольных подач, но передача фартука не участвует. Уравнение кинематической цепи в этом случае определяется исходя из следующего: за один оборот шпинделя суппорт с резцом должен пройти путь, равный шагу нарезаемой резьбы, и напишется в таком виде:

Кинематическая цепь для получения метрической резьбы
где Тн.р. – шаг нарезаемой резьбы.
В этой цепи конус шестерен Б10 (26, 28, 32, 36, 40, 44, 48) является ведущим.
Не все колеса, находясь в зацеплении с накидным колесом z = 36, дают гостированные шаги, например для шага Тн.р. = 1 мм участвует колесо конуса z = 32, что видно из уравнения кинематической цепи

Пример кинематической цепи для получения метрической резьбы
Звено увеличения шага резьбы
В коробке скоростей имеется звено увеличения шага резьбы. Для получения увеличенных шагов резьб необходимо двойной блок z = 60 – z = 45 вала VII переместить вправо до зацепления колеса z = 45 этого блока с колесом z = 45 вала III. Тогда число оборотов вала по отношению к шпинделю будет увеличено в 16 или в 4 раза, при этом шпиндель должен вращаться через передачу 27/54.
Тогда все остальные передачи и ходовой винт будут вращаться ускоренно в 32, в 8 или в 2 раза в зависимости от включения блоков z=88 – z=45 и z=22 – z=45 на валу IV. Наибольший шаг резьбы Тн.р. = 192 мм при передаточном отношении трензеля iTP = 28/56.
Кинематическая цепь для получения модульных резьб
Шаг модульной резьбы пропорционален π – Тн.р. = π•m (m – модуль зацепления в мм). Кинематическая цепь осуществляется аналогично цепи для метрической резьбы, но в гитаре сменных колес надо установить колеса 64/95 • 95/97.
Уравнение кинематической цепи напишется в таком виде:

Кинематическая цепь для получения модульных резьб
Для получения крупных модульных резьб применяют звено увеличения шага резьбы и mmах = 48 мм.
Кинематическая цепь для получения дюймовых и питчевых резьб
Дюймовая резьба характеризуется числом ниток на 1″. Запись кинематической цепи производится так же, как и для метрической резьбы, но конус шестерен является ведомым, для чего муфта MФ2 отключается от колеса z = 35, а муфты MФ4 и MФ3 выклю-чены.
Общее уравнение кинематической цепи будет иметь вид:

Кинематическая цепь для получения дюймовых и питчевых резьб
Пределы чисел ниток нарезаемой резьбы: Тн.р. = 2…24 нитки на 1″. Очень редко применяется питчевая резьба, которая характеризуется питчами. Величина питча р = 25,4/m. Кинематическая цепь аналогична, как и для дюймовой, но в гитаре сменных колес устанавливаются колеса 64/95 • 95/97. Пределы величин р: 7…96, а для меньших величин применяют звено увеличения шага резьбы.
Кинематическая цепь для нарезания особо точных резьб
Эти резьбы нарезают при помощи включения ходового винта, минуя коробку подач, сокращая этим кинематическую цепь. Для этого необходимо соединить ходовой винт с валом IX коробки подач включением муфт MФ2, MФ4, MФ5 и разъединением блока колес z=25 и z=36 от конуса в коробке подач.
Уравнение кинематической цепи в этом случае напишется так:
1 • 60/60 • 42/42 • x • 12 = Тн.р.; отсюда х = Тн.р./12
где х – передаточное отношение сменных колес, состоящее из одной или двух пар.
Быстрое перемещение суппорта
Оно производится нажатием кнопки, встроенной в рукоятке управления, и осуществляется от электродвигателя ускоренного перемещения. Скорость перемещения суппорта в продольном направлении определяется из уравнения кинематической цепи

Быстрое перемещение суппорта
а в поперечном = 1680 мм/мин.
Трофимов А.М. Металлорежущие станки. Альбом кинематических схем
КИНЕМАТИКА ПРОЦЕССА РЕЗАНИЯ
Кинематика процесса резания изучает закономерности относительного движения инструмента и заготовки без учета физических явлений, протекающих в зоне резания, и в первую очередь действующих сил и температур
для этого систему СПИД (сокращенное название системы «станок – приспособление – инструмент – деталь») принимают абсолютно жесткой и не зависящей от тепловых воздействий.
Прежде чем переходить к изложению основополагающих понятий кинематики процесса резания, следует завершить рассмотрение общих сведений, касающихся систем координат и координатных плоскостей, характеризующих взаимное расположение инструмента и заготовки. При этом мы опустим рассмотрение геометрии режущего инструмента и механизмов изнашивания лезвия.
Координатные плоскости. Системы координат
Лезвия режущих инструментов при проектировании, изготовлении и эксплуатации рассматривают в прямоугольной системе координат Рy t Рn, где Рy – основная плоскость; t – рассматриваемая точка режущей кромки; Рn – плоскость резания.
Основная плоскость Рy – это координатная плоскость, проведенная через рассматриваемую точку режущей кромки перпендикулярно направлению скорости главного (или результирующего) движения резания. Плоскость резания Рn – это координатная плоскость, проходящая через режущую кромку параллельно направлению скорости главного (результирующего) движения резания. Она перпендикулярна основной плоскости.
В зависимости от ориентации основной плоскости различают три системы координат: инструментальную РуИ t РnИ, статическую РуС t РnC, и кинематическую РyK t РnK. Инструментальная система координат ориентирована относительно лезвий режущего инструмента (рис. 1а). Она применяется при изготовлении и контроле режущих элементов инструмента. При работе с этой системой координат принимают, что направление скорости главного движения резания проходит через режущие кромки касательно к окружности их вращения или вдоль режущих кромок (при расположении их вдоль прямой линии).
Статическая система координат ориентирована относительно направления скорости главного движения резания, которое может быть непараллельно линии вершин лезвий (рис. 1б). Она применяется для приближенных расчетов углов лезвия в процессе резания и для учета изменения этих углов после установки инструмента на станке.
Кинематическая система координат ориентирована относительно направления скорости результирующего движения резания (рис. 1в). Она применяется для учета реальных значений угловых параметров режущих элементов инструментов в процессе резания.
Секущие плоскости
Линейные углы лезвий режущих инструментов измеряются в секущих плоскостях: главной Рτ, нормальной Рн и плоскости схода стружки Рс.
Главной секущей плоскостью Рτ называется координатная плоскость, перпендикулярная линии пересечения основной плоскости и плоскости резания. В инструментальной системе координат она называется инструментальной главной секущей плоскостью Рτи, в статической – статической главной секущей плоскостью Рτс, в кинематической – кинематической главной секущей плоскостью Рτк.
Условия резания древесины реальным лезвием
На рис. 2 показана схема резания древесины реальным лезвием. При внедрении лезвия в древесину ее разрушение происходит около наиболее выдвинутой точки лезвия n. Эта точка лежит на плоскости резания Рn. Отделяемая часть древесины, расположенная выше плоскости резания, скользит по передней грани лезвия и образует стружку.

Срезаемый слой – это часть припуска между смежными поверхностями резания или слой материала заготовки, отделяемый лезвием за один цикл (или его долю) главного движения резания. Срезаемый слой характеризуется сечением, площадью срезаемого слоя и его линейными размерами.
Сечение срезаемого слоя – это фигура, образованная при рассечении слоя материала заготовки, отделяемого лезвием за один цикл главного движения резания основной плоскостью Рv. При этом в каждом конкретном случае следует дополнительно указывать систему координатных плоскостей, в которой рассматривается сечение срезаемого слоя. Так, на рис. 2а сечение показано в инструментальной системе координат, а на рис. 2б – в кинематической системе координат.
Толщина срезаемого слоя а – наикратчайшее расстояние между предыдущей и последующей поверхностями резания, ограниченное сечением срезаемого слоя.
Ширина срезаемого слоя b – длина стороны сечения срезаемого слоя, образованной поверхностью резания.
Длина срезаемого слоя l – размер стороны срезаемого слоя, образованной поверхностью резания по траектории рассматриваемой точки режущей кромки.
Объем срезаемого слоя V = a b l.
Кинематика процесса резания. Общие сведения
Кинематика резания рассматривает классификацию принципиальных кинематических схем резания и трансформацию геометрических параметров срезаемых слоев и лезвий во время рабочего цикла. Угловые параметры лезвий могут трансформироваться, если рабочие движения при резании выполняются одновременно. Движения, сообщаемые инструменту и заготовке, обычно рассматривают в прямоугольной системе координат с осями x, y, z. С ее помощью ориентируют также взаимное положение всех механизмов станка. Кинематика станков обеспечивает различные сочетания движений механизмов:
а) рабочие и холостые движения;
б) главное движение при выключенном движении подачи;
в) движение подачи при бездействующем главном движении;
г) одновременное действие движений главного и подачи.
Сочетания исходных движений регламентированы системой принципиальных кинематических схем резания. Из большого разнообразия кинематических схем резания наибольшее распространение получили следующие три схемы:
– схема с одним прямолинейным движением (строгание ручным рубанком, строгание шпона);
– схема с двумя прямолинейными движениями: главным движением и движением подачи (пиление рамными и ленточными пилами);
– схема с двумя движениями, из которых главное – вращательное движение, а движение подачи поступательное (самая распространенная схема, которая характерна для лущения шпона, точения на токарных станках и т.д.).
Электронная библиотека
В настоящее время в промышленности используются режущие инструменты, отличающиеся друг от друга по кинематике движения, виду оборудования, способу изготовления, материалу режущей части, конструктивному исполнению и т.д. Однако в каждом из них можно выделить режущий клин, определяющий возможности срезания слоя металла (припуска). Форма режущего клина бывает различной и определяет геометрические параметры режущей части инструмента.
На основании понятий и определений геометрии простейшего инструмента, например токарного резца, имеющего в своем сечении режущий клин, изучают особенности геометрии более сложных инструментов.
При обработке резанием различают главное движение резания и движение подачи (рис. 1.1).
Главное движение резания (Dr) – поступательное или вращательное движение заготовки или режущего инструмента, происходящее в процессе резания с наибольшей скоростью (V).
Движение подачи (Ds) – поступательное или вращательное движение инструмента или заготовки, скорость которого (Vs)меньше скорости главного движения резания. Движение подачи позволяет отделять слой материала на всей обработанной поверхности.
Движения подачи могут различаться по направлениям (рис. 1.2). Так, при точении перемещение резца параллельно оси заготовки называют продольной подачей (рис. 1.2, а), а перпендикулярно к оси – поперечной (рис. 1.2, б, в). При этом образуется соответственно деталь цилиндрической формы (рис. 1.2, а) или плоскость, перпендикулярная к оси центров (рис. 1.2, б).
Фасонные резцы при поперечной подаче создают различные поверхности вращения (рис. 1.2, в). При перемещении резца под некоторым углом к оси центров образуется
коническая поверхность (рис.

1.2, г). Перемещение резца может осуществляться по заданной кривой по программе или копиру в плоскости, проходящей через ось центров, при этом получается поверхность с криволинейной образующей (рис. 1.2, д).
Сложение величин V и Vs (см. рис. 1.1) позволяет определить скорость результирующего движения резания (Ve).
Количество движений, с помощью которых производится процесс резания, различно. Сочетание движений, сообщаемых механизмом станка в процессе резания инструменту и обрабатываемой детали, представляет кинематическую схему резания. В зависимости от количества и характера сочетаемых элементарных движений Г.И. Грановским кинематические схемы резания были систематизированы по группам:
1) одно прямолинейное движение;
2) два прямолинейных движения;
3) одно вращательное движение;
4) одно вращательное и одно прямолинейное движения;
5) два вращательных движения;
6) два прямолинейных и одно вращательное движения;
7) два вращательных и одно прямолинейное движения;
8) три вращательных движения.
Любой реальный процесс резания входит в одну из этих групп. Например, строгание, протягивание – в первую группу; точение, сверление, фрезерование плоских поверхностей – в четвертую; фрезерование тел вращения – в пятую; нарезание зубчатых колес методом обкатки – в седьмую и т.д.
На обрабатываемой заготовке при снятии стружки различают три поверхности (рис.1.3):
· обрабатываемую, которая частично или полностью удаляется при обработке;
· обработанную, образованную на заготовке в результате обработки;
· поверхность резания, образуемую режущей кромкой в результирующем движении резания.
Поверхность резания является переходной между обрабатываемой и обработанной поверхностями.
Срочно?
Закажи у профессионала, через форму заявки
8 (800) 100-77-13 с 7.00 до 22.00
http://techno58.ru/mudrost/2/
http://libraryno.ru/1-1-kinematika-rezaniya-rezmatnew/