Примеры решения задач
Пример 1. Колебания материальной точки происходят относительно положения равновесия по закону х=А∙sinωt с периодом T=12 с. Определить, за какой наименьший промежуток времени t1 точка удалится от положения равновесия на расстояние, равное половине амплитуды x=A/2. За какой промежуток времени t2 она пройдет оставшуюся часть пути до максимального отклонения.
Решение. В момент времени t1 cмещение равно А/2: А/2=А∙sinωt1, sinωt1=1/2, т.е. ωt1=π/6, или (2π/Т)t1=π/6.
Расстояние от точки равновесия до точки максимального отклонения материальная точка проходит за t=T/4. Следовательно, t2=T/4- T/12= 2 c.
Пример 2.За какую часть периода точка, совершающая гармонические колебания по закону косинуса, сместится на половину амплитуды, если в начальный момент она находилась в положении равновесия?
Решение.Колебания точки описываются уравнением x=Acos(ω0t+α). Поскольку при t = 0 смещение х = 0, то начальная фаза φ должна равняться π/2, т.е. уравнение имеет вид:

По условию смещение x=A/2, следовательно,  (знак «минус» не учитываем, т.к. нас интересует первое попадание колеблющейся частицы в данное положение).
(знак «минус» не учитываем, т.к. нас интересует первое попадание колеблющейся частицы в данное положение).
Отсюда  и
и 
Пример 3.Точка совершает колебания по закону x=5cosω0t (м), где ω0= 2 с –1 . Определить ускорение точки в момент времени, когда ее скорость равна 8 м/с.
Решение.Зависимости скорости и ускорения колеблющейся точки от времени задаются уравнениями


Следовательно,  . Тогда
. Тогда  и с учетом того, что α=0, получаем
и с учетом того, что α=0, получаем 
Пример 4.Максимальная скорость точки, совершающей гармонические колебания, равна 10 см/с, максимальное ускорение равно 100 см/с 2 . Найти циклическую частоту колебаний, их период и амплитуду.
Решение.Из формул
a=-A  cos(ω0t+α)=- amaxcos(ω0t+α),
cos(ω0t+α)=- amaxcos(ω0t+α),

Период 
Амплитуда 
Пример 5.Амплитуда гармонических колебаний материальной точки А = 0,02 м, полная энергия колебаний W=3∙10 –7 Дж. При каком смещении от положения равновесия на колеблющуюся точку действует сила F= 2,25∙10 –5 Н?
Решение.Из  можно выразить
можно выразить 
Тогда, используя выражение F=-kx, получим

Пример 6.В качестве физического маятника используется стержень, подвешенный за один из его концов. Чему равен период колебаний при длине стержня 1 м?
Решение.Для того, чтобы воспользоваться формулой  , необходимо по теореме Штейнера посчитать момент инерции стержня относительно оси, проходящей через точку подвеса:
, необходимо по теореме Штейнера посчитать момент инерции стержня относительно оси, проходящей через точку подвеса:

Тогда, учитывая, что x=l/2,

Пример 7.Два одинаково направленных гармонических колебания заданы уравнениями x1=A1∙sinω0t и x2=A2∙cosω0t, где А1 = 1 см; А2 = 2 см; ω0 = 1 с –1 . Определить амплитуду результирующего колебания А, его частоту v и начальную фазу α. Найти уравнение этого движения.
Решение.Преобразуем первое уравнение, заданное в условии задачи, к виду x=A∙cos(ω0t+α) и получим
Тогда по формуле  амплитуда результирующего колебания:
амплитуда результирующего колебания:

=1+4+2∙2∙cos0,5π=5 см 2 .

Частота результирующего колебания равна частоте складывающихся колебаний

Начальную фазу находим по формуле:

Начальная фаза α=arctg(-0,5)=-26,6°=-0,46 рад.
Уравнение результирующего колебания имеет вид x=2,24∙10 -2 cos(t-0,46) м.
Пример 8.Складываются два колебания одинакового направления (рис.23), выражаемых уравнениями x1=A1cosω(t+τ1) и x2=A2cosω(t+τ2), где А1=1 см; А2=2 см; τ1=1/6 с; τ2=1/2 с; ω=π рад/с. Определить начальные фазы φ1 и φ2 составляющих колебаний; найти амплитуду А и начальную фазу φ результирующего колебания.

Рис.23
Решение. Уравнение гармонического колебания имеет вид:
Преобразуем уравнения, заданные в условии задачи, к такому же виду:
Из сравнения выражений (2) с (1) находим начальные фазы первого и второго колебаний: φ1=ωτ1=π/6 рад и φ2= ωτ2=π/2 рад.
Для определения амплитуды А результирующего колебания удобно воспользоваться векторной диаграммой, представленной на рис.23.
Согласно теореме косинусов, получим:

Подставим значения А1, А2 и φ2-φ1 в (3), извлечем корень и получим: А=2,65 см.
Тангенс начальной фазы результирующего колебания определим непосредственно из рисунка 41.1:

Тогда φ=arctg(5/  )=70,9°=0,394π рад.
)=70,9°=0,394π рад.
Так как циклические частоты складываемых колебаний одинаковы, то результирующее колебание будет иметь ту же частоту ω.
Это позволяет написать уравнение результирующего колебания в виде х=А∙cos(ωt+φ),
где А=2,65 см, ω=π рад/с, φ=0,394π рад.
Пример 9. Шарик массой m=10 -2 кг=10 г совершает гармонические колебания с амплитудой А=0,2 м и периодом Т=4 с. В начальный момент времени t=0: х=А. Найти кинетическую и потенциальную энергию в момент времени t= 1 с.
Решение: Запишем уравнение гармонических колебаний
Т.к. при t=0 х=А, то можно определить начальную фазу Асоs(ω∙0+φ0)=A, соsφ0=1, φ0=0.
Таким образом, х=0,2cos[(2π/4)t]= 0,2cos[(π/2)t] (м).
Кинетическая энергия шарика определяется по формуле: Ек=mv 2 /2, где v=dx/dt=-Aω∙sinωt.
Ек=[mA 2 ω 2 ∙sin 2 ωt]/2=5∙10 -3 Дж.
Потенциальная энергия шарика равна:
Еп=kx 2 /2=[kА 2 cos 2 ωt]/2=[kА 2 cos 2 (π/2)]/2,
Пример 10. Физический маятник представляет собой стержень длиной l=1 м и массой mc=3m1 с прикрепленным к одному из его концов обручем диаметром d=l/2 и массой mо=m1. Горизонтальная ось ОZ проходит через середину стержня перпендикулярно ему (рис. 24). Определить период колебаний такого маятника T — ?.
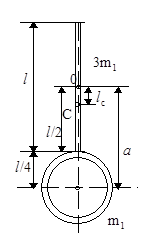
Рис.24
Решение. Период колебаний физического маятника определяется по формуле

где J — момент инерции маятника относительно оси колебаний, m — его масса, lc — расстояние от центра масс маятника до оси колебаний. Момент инерции маятника равен сумме моментов инерции стержня J1 и обруча J2:
Момент инерции стержня относительно оси, перпендикулярной стержню и проходящей через его центр масс, определяется по формуле J1=mcl 2 /12, т.е. J1=m1l 2 /4.
Момент инерции обруча найдем, воспользовавшись теоремой Штейнера J=Jo+ma 2 . Применив эту формулу к обручу, получим
Подставив выражения J1 и J2 в формулу (2), найдем момент инерции маятника относительно оси вращения:
Расстояние lc от оси маятника до его центра масс равно
Подставив в формулу (1) выражения J, Jc и массы маятника (m=3m1+m1=4m1), найдем период его колебаний:

После вычисления по этой формуле получим Т=2,17 с.
Пример 11. Точка участвует одновременно в двух взаимно перпендикулярных колебаниях (рис.25), выражаемых уравнениями x=2cosω0t (см) и y=sinω0t (см). Найти уравнение траектории точки и построить ее, указав направление движения, если ω0=π/3 (с –1 ).

Рис.25
Решение.Преобразуем второе уравнение к виду y=Аcos(ω0t+α) и получим:

Как видно, разность фаз складывающихся колебаний α= -π/2 и это соответствует частному случаю, когда уравнение траектории имеет вид:  . Траекторией движения в этом случае является эллипс, приведенный к главным осям, уравнение которого
. Траекторией движения в этом случае является эллипс, приведенный к главным осям, уравнение которого  .
.
Для того, чтобы указать направление движения точки, необходимо проследить, как меняется ее положение с течением времени. Для этого найдем координаты точки для двух ближайших моментов времени. Период результирующих колебаний  Поэтому моменты времени, отличающиеся на одну секунду, можно считать достаточно близкими.
Поэтому моменты времени, отличающиеся на одну секунду, можно считать достаточно близкими.
Следовательно, точка 1 имеет координаты (2; 0), а точка 2 – (1; 0,86). Это означает, что движение происходит против часовой стрелке.
Пример 12.Амплитуда колебаний математического маятника длиной 1 м за время 10 мин уменьшилась в 2 раза. Определить коэффициент затухания, логарифмический декремент затухания колебаний и количество колебаний, совершенных за это время. Записать уравнение колебаний, если в начальный момент маятник был отведен из положения равновесия на 5 см и отпущен.
Решение.Период и частоту колебаний математического маятника найдем из выражения:

Запишем отношение амплитуд (начальной A0=5 см и через время t = 10 мин = 600 с):

следовательно, βt=ln2, отсюда

Количество колебаний N, совершенных за время t , найдем из того, что t=NT, а, значит, βNT=ln2, и тогда
Логарифмический декремент затухания определим по:
Выбор гармонической функции для написания уравнения колебаний проведем на основании того, что в начальный момент смещение точки от положения равновесия равно амплитуде, а этому условию удовлетворяет функция косинус. Тогда уравнение данных затухающих колебаний имеет вид: x=5∙10 -2 e -0,001 t cosπt (м).
Пример 13.Пружинный маятник, (жесткость пружины которого равна k = 10 Н/м, а масса груза m = 100 г) совершает вынужденные колебания в вязкой среде с коэффициентом сопротивления r = 0,02 кг/с. Определить коэффициент затухания β и резонансную амплитуду Арез, если амплитудное значение вынуждающей силы F0 = 10 мН.
Решение.Коэффициент затухания:

Тогда резонансная частота:

Пример 14.Тело D массы mD = 10 кг расположено на гладкой плоскости, наклоненной под углом  = 30° к горизонту, и прикреплено к концу A пружины, коэффициент жесткости которой с = 36.1 Н/см (рис. 26). В некоторый момент к грузу D присоединяют груз Е массы mЕ = 15 кг. В тот же момент времени верхний конец пружины B начинает двигаться вдоль наклонной плоскости по закону
= 30° к горизонту, и прикреплено к концу A пружины, коэффициент жесткости которой с = 36.1 Н/см (рис. 26). В некоторый момент к грузу D присоединяют груз Е массы mЕ = 15 кг. В тот же момент времени верхний конец пружины B начинает двигаться вдоль наклонной плоскости по закону  см, причем точка O1 совпадает со средним положением точки B (при
см, причем точка O1 совпадает со средним положением точки B (при  ). Сопротивление движению двух грузов пропорционально их скорости v,
). Сопротивление движению двух грузов пропорционально их скорости v,  , где
, где  = 100 (Нс)/м – коэффициент сопротивления. Найти уравнение движения грузов D и E.
= 100 (Нс)/м – коэффициент сопротивления. Найти уравнение движения грузов D и E.
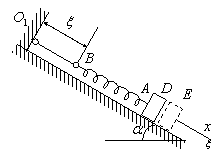
Рис.26
Решение. Направим оси Ox и  вдоль наклонной плоскости вниз, в сторону растяжения пружины (рис. 27). Начало O координатной оси Ox совместим с положением покоя грузов D и E, соответствующим статической деформации пружины, при условии, что точка B занимает свое среднее положение ( ). В этом положении пружина растянута на величину
вдоль наклонной плоскости вниз, в сторону растяжения пружины (рис. 27). Начало O координатной оси Ox совместим с положением покоя грузов D и E, соответствующим статической деформации пружины, при условии, что точка B занимает свое среднее положение ( ). В этом положении пружина растянута на величину  , где
, где  и
и  – статические деформации пружины под действием груза D и E.
– статические деформации пружины под действием груза D и E.
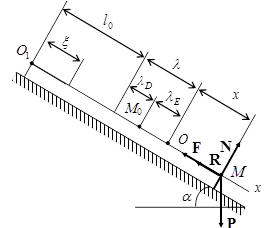
Рис.27
Изобразим грузы в промежуточном положении, отстоящем от начала координат на величину x (точка M). Если бы верхний конец пружины был неподвижен, то в этом положении пружина была бы растянута на величину (  ). Но при смещении вниз верхнего конца пружины на некоторую величину
). Но при смещении вниз верхнего конца пружины на некоторую величину  удлинение пружины окажется меньшим на эту величину , т.е.
удлинение пружины окажется меньшим на эту величину , т.е.  . Следовательно, проекция силы упругости пружины на ось x в точке M будет определяться выражением:
. Следовательно, проекция силы упругости пружины на ось x в точке M будет определяться выражением:  . Проекция силы сопротивления
. Проекция силы сопротивления  . Таким образом, дифференциальное уравнение движения грузов в проекции на ось x имеет вид
. Таким образом, дифференциальное уравнение движения грузов в проекции на ось x имеет вид
 ,
,
где  . Учитывая, что в состоянии статического равновесия грузов
. Учитывая, что в состоянии статического равновесия грузов  , получим
, получим
 ,
,
 , (1)
, (1)


Начальные условия для уравнения (1) определяются соотношениями

Как известно, решение линейного дифференциального уравнения (1) складывается из общего решения  соответствующего однородного уравнения
соответствующего однородного уравнения
 (2)
(2)
и частного решения x2 неоднородного уравнения (1)
 . (3)
. (3)
Общее решение однородного уравнения (2) имеет вид
 . (4)
. (4)
Частное решение неоднородного уравнения (3) будем искать в виде
 . (5)
. (5)
Определив производные  подставив их в уравнение (3), получим
подставив их в уравнение (3), получим

Чтобы полученное равенство выполнялось в любой момент времени, необходимо равенство нулю выражений в квадратных скобках. Таким образом, для определения коэффициентов A1 и A2 имеем систему из двух линейных уравнений

решение которой записывается так

или после подстановки численных данных
|
Следовательно, решение уравнения (1) принимает вид

причем скорость точки равна


Постоянные интегрирования C1 и C2 определим из начальных условий: С1 = –1.2928 см, С2 = –0.2181 см. В результате уравнение движения груза имеет вид


Вопросы для самопроверки
— Под действием какой силы совершаются свободные колебания материальной точки?
— Какой вид имеет дифференциальное уравнение свободных колебаний материальной точки?
— От каких факторов зависят частота, период, амплитуда и начальная фаза свободных колебаний материальной точки?
— Каков вид графиков свободных и затухающих колебаний, а также апериодического движения материальной точки?
— Какой вид имеет дифференциальное уравнение вынужденных колебаний материальной точки и каково его общее решение?
— Из каких составляющих движений складывается движение материальной точки, находящейся под действием восстанавливающей и возмущающей сил?
— Каковы частота и период вынужденных колебаний материальной точки?
— Какие вынужденные колебания называются колебаниями малой частоты и какие – колебаниями большой частоты? Чем характеризуется тот и другой вид колебаний?
— От каких факторов зависит амплитуда вынужденных колебаний точки?
— Что называют коэффициентом динамичности и каков график его зависимости от отношения p/k?
— При каком условии возникает явление биений? Каков график биений?
— При каких условиях возникает резонанс и каковы уравнения и график вынужденных колебаний материальной точки при резонансе?
— Как влияет сопротивление, пропорциональное скорости, на амплитуду, фазу, частоту и период вынужденных колебаний?
— Как определить максимальное значение амплитуды вынужденных колебаний при данном значении коэффициента затухания n?
— При каком значении коэффициента затухания максимум амплитуды вынужденных колебаний не существует?
— Какова зависимость сдвига фазы колебаний  от частоты изменения возмущающей силы p и от коэффициента затухания n?
от частоты изменения возмущающей силы p и от коэффициента затухания n?
Гармонические колебания
О чем эта статья:
9 класс, 11 класс, ЕГЭ/ОГЭ
Механические колебания
Механические колебания — это физические процессы, которые точно или приблизительно повторяются через одинаковые интервалы времени.
Колебания делятся на два вида: свободные и вынужденные.
Свободные колебания
Это колебания, которые происходят под действием внутренних сил в колебательной системе.
Они всегда затухающие, потому что весь запас энергии, сообщенный в начале, в конце уходит на совершение работы по преодолению сил трения и сопротивления среды (в этом случае механическая энергия переходит во внутреннюю). Из-за этого свободные колебания почти не имеют практического применения.
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Вынужденные колебания — это колебания, которые происходят под действием внешней периодически меняющейся силы.
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели. Если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку — такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
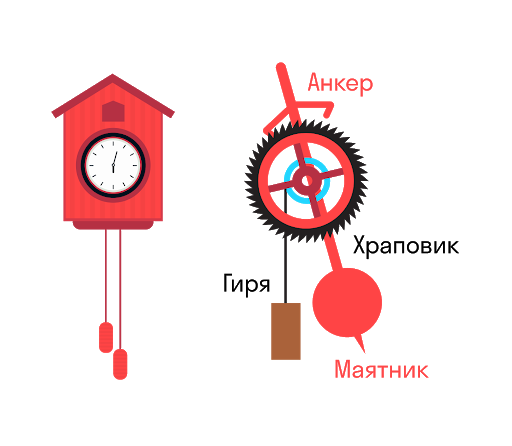
Часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.
Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
Характеристики колебаний
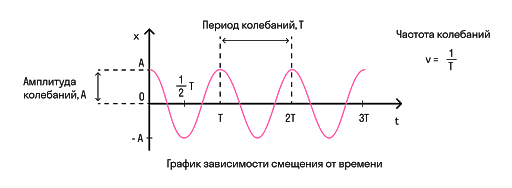
Чтобы перейти к гармоническим колебаниям, нам нужно описать величины, которые помогут нам эти колебания охарактеризовать. Любое колебательное движение можно описать величинами: период, частота, амплитуда, фаза колебаний.
Период — это время одного полного колебания. Измеряется в секундах и обозначается буквой T.
Формула периода колебаний
T = t/N
N — количество колебаний [—]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
N — количество колебаний [—]
Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо x max .
Она используется в уравнении гармонических колебаний:
Гармонические колебания
Простейший вид колебательного процесса — простые гармонические колебания, которые описывают уравнением:
Уравнение гармонических колебаний
x — координата в момент времени t [м]
t — момент времени [с]
(2πνt) в этом уравнении — это фаза. Ее обозначают греческой буквой φ
Фаза колебаний
t — момент времени [с]
Фаза колебаний — это физическая величина, которая показывает отклонение точки от положения равновесия. Посмотрите на рисунок, на нем изображены одинаковые фазы:
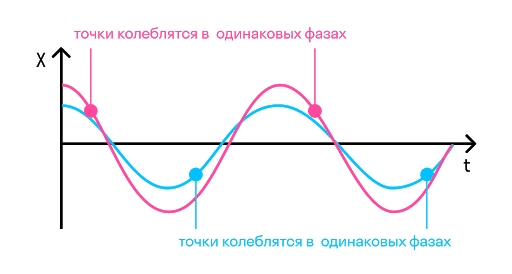
Например, в тех же самых часах с кукушкой маятник совершает колебания. Он качается слева направо и приходит в самую правую точку. В той же фазе он будет находиться, когда придет в ту же точку, идя справа налево. Если мы возьмем точку на сантиметр левее самой правой, то идя в нее не слева направо, а справа налево, мы получим уже другую фазу.
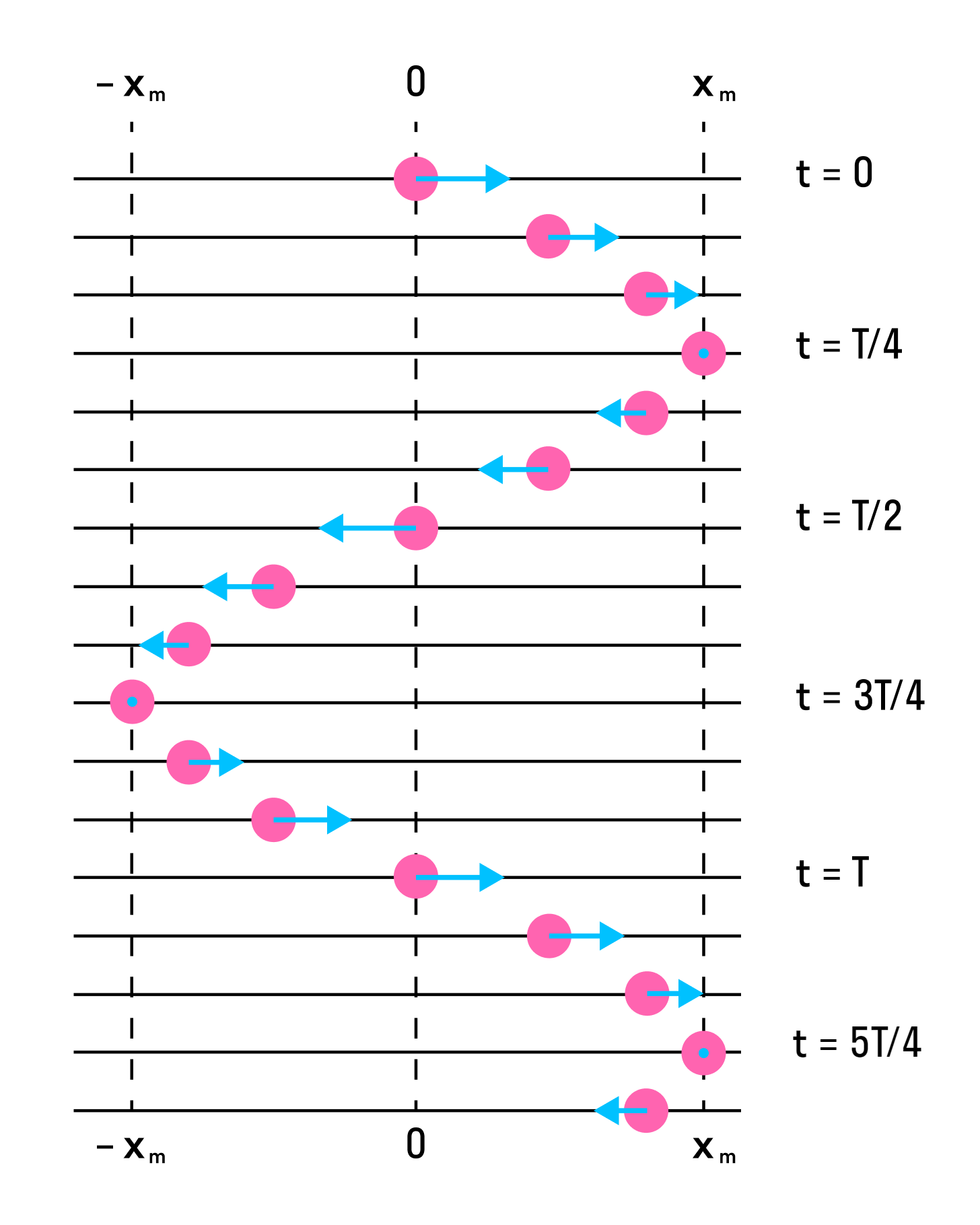
На рисунке ниже показаны положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить при освещении колеблющегося тела короткими периодическими вспышками света (стробоскопическое освещение). Стрелки изображают векторы скорости тела в различные моменты времени.
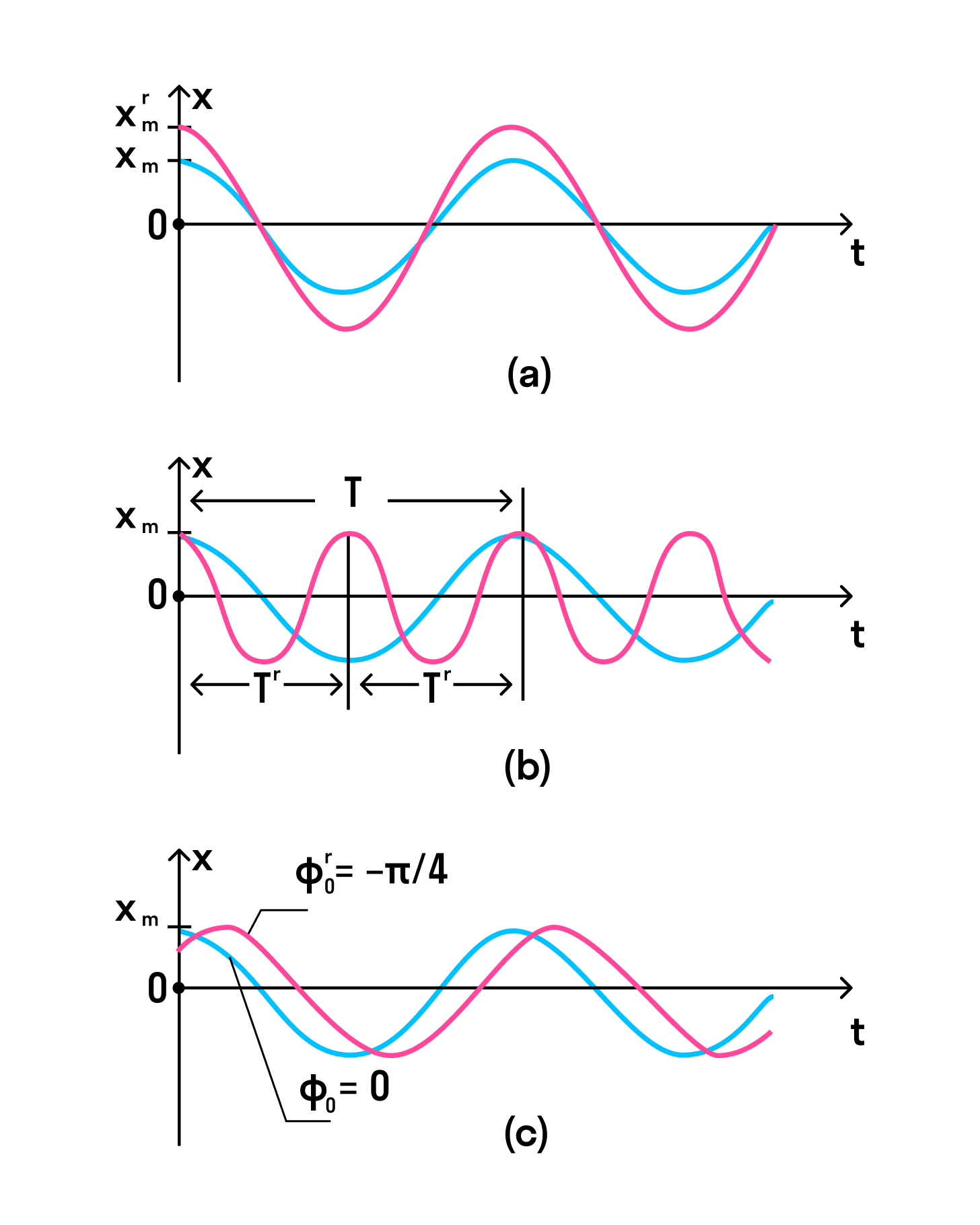
Если изменить период, начальную фазу или амплитуду колебания, графики тоже изменятся.
На рисунке ниже во всех трех случаях для синих кривых начальная фаза равна нулю, а в последнем (с) — красная кривая имеет меньшую начальную фазу.
В первом случае (а) красная кривая описывает колебание, у которого амплитуда больше колебания, описанного синей линией.
Во втором случае (b) красная кривая отличается от синей только значением периода — у красной период в два раза меньше.
Математический маятник
Математический маятник — отличный пример гармонических колебаний. Если мы подвесим шарик на нити, то это еще не будет математическим маятником — пока он только физический.
Математическим этот маятник станет, если размеры шарика много меньше длины нити (тогда этими размерами можно пренебречь и рассматривать шарик как материальную точку), растяжение нити очень мало, а масса нити во много раз меньше массы шарика.
Математическим маятником называется система, которая состоит из материальной точки массой m и невесомой нерастяжимой нити длиной l, на которой материальная точка подвешена, и которая находится в поле силы тяжести (или других сил).
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле:
Формула периода колебания математического маятника
l — длина нити [м]
g — ускорение свободного падения [м/с 2 ]
На планете Земля g = 9,8 м/с 2
Пружинный маятник
Пружинный маятник — это груз, прикрепленный к пружине, массой которой можно пренебречь.
В пружинном маятнике колебания совершаются под действием силы упругости.
Пока пружина не деформирована, сила упругости на тело не действует.
Формула периода колебания пружинного маятника
m — масса маятника [кг]
k — жесткость пружины [Н/м]
Закон сохранения энергии для гармонических колебаний
Физика — такая клевая наука, в которой ничего не исчезает бесследно и не появляется из ниоткуда. Эту особенность описывает закон сохранения энергии.
Рассмотрим его на примере математического маятника.
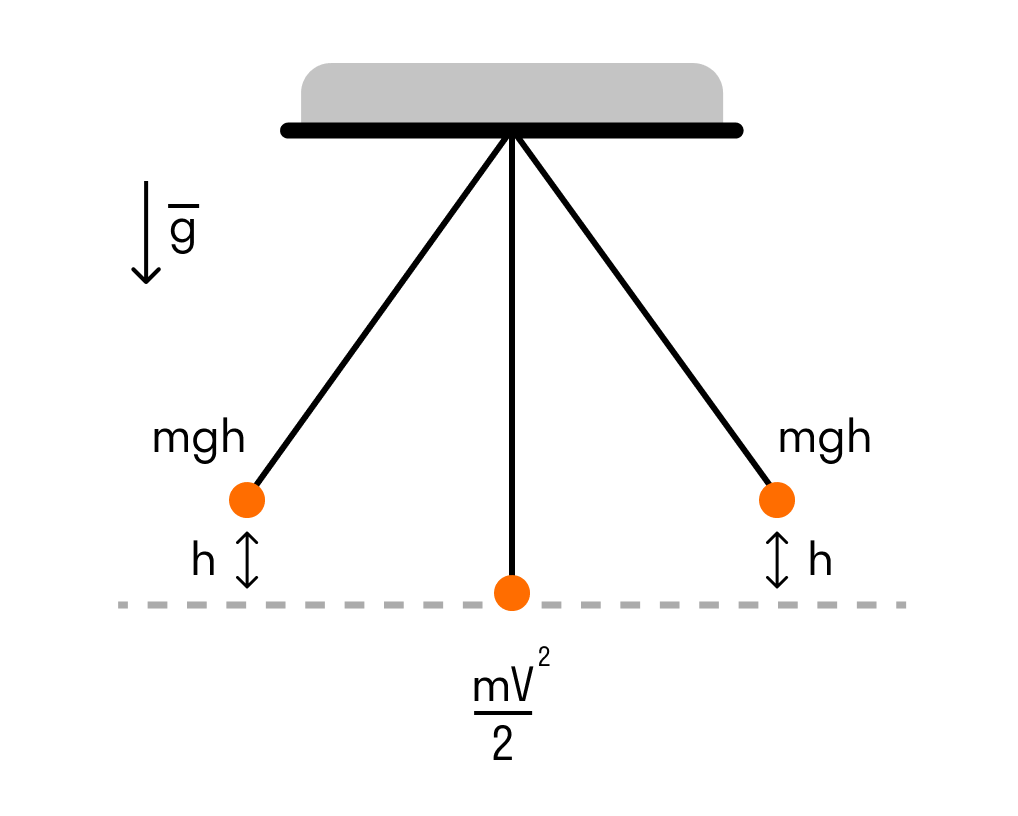
- Когда маятник отклоняют на высоту h, его потенциальная энергия максимальна.
- Когда маятник опускается, потенциальная энергия переходит в кинетическую. Причем в нижней точке, где потенциальная энергия равна нулю, кинетическая энергия максимальна и равна потенциальной энергии в верхней точке. Скорость груза в этой точке максимальна.
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
Уравнение колебаний
Определение и уравнение вибрации
Колебательные движения (или колебания) в физике и технике называют такими типами движений (или изменениями состояния), которые имеют некоторую степень повторяемости.
Колебания, которые происходят по законам синуса или косинуса, называются гармоническими.
Уравнение гармонических колебаний:
где t — время; x-значение, изменяющееся со временем (координата, заряд, ток, EMF и т. д.); A — амплитуда колебаний — максимальное отклонение осциллирующей величины от среднего (нулевого) значения; — фаза колебаний; — начальная фаза; w — циклическая частота (изменение фазы за единицу времени). За период фаза изменяется на
Дифференциальное уравнение гармонических колебаний
дифференциальное уравнение гармонических колебаний.
Типы периодических колебаний могут быть с любой степенью точности представлены в виде суммы гармонических колебаний, так называемых гармонических рядов.
Колебания, которые тело будет выполнять, если они выведены из равновесия (независимо от того, как) и оставлены сами по себе, называются свободными (собственными) вибрациями. Если собственные колебания обусловлены наличием только квазиупругой силы, то они будут гармоническими.
Колебания тела, вызванные одновременным воздействием квазиупругой силы и силы трения (которая пропорциональна мгновенной скорости: , называются затухающими колебаниями.
Уравнение (3) называется дифференциальным затухающим уравнением. Здесь — коэффициент затухания.
Решение дифференциального уравнения колебаний
Решением дифференциального уравнения затухающих колебаний (3) является отношение вида:
Уравнение (4) называется уравнением затухающего колебания. В уравнении (4) видно, что амплитуда затухающих колебаний зависит от времени. Константы А и определяются начальными условиями. Амплитуда колебаний уменьшается, и они обычно выглядят так, как показано на рис.
Период затухающих колебаний рассчитывается по формуле (5):
Коэффициент физического ослабления означает, что коэффициент затухания является обратной величиной времени релаксации. Время релаксации — время, в течение которого амплитуда уменьшается в е. Однако коэффициент затухания не полностью характеризует затухание. Демпфирование вибрации обычно характеризуется декрементом демпфирования. Последнее показывает, сколько раз амплитуда колебаний уменьшается за время, равное периоду колебаний. То есть декремент затухания определяется как:
Логарифм декремента затухания называется логарифмическим декрементом; он, очевидно, равен:
Если колебательная система подвергается внешней периодической силе, то возникают так называемые вынужденные колебания, имеющие не затухающий характер.
Принудительные вибрации следует отличать от автоколебаний. В случае автоколебаний в системе предполагается специальный механизм, который со временем со своими колебаниями «подает» небольшую часть энергии в систему.
Примеры решения проблем
Найти энергию свободных колебаний нагрузки, подвешенной на пружине. Рассмотрим случай физического маятника, зная, что жесткость пружины равна k, амплитуда колебаний A.
Найдем энергию свободных колебаний. Он представлен двумя типами энергии: кинетическими и потенциальными. Для пружинного подвесного шара:
Шаровые колебания описывают уравнение колебаний:
мы напишем уравнение скорости шара, зная, что движение происходит только вдоль оси X, поэтому:
Подставляя (1.2) и (1.3) в (1.1), получаем:
зная, что для физического маятника
Энергия свободных колебаний пропорциональна квадрату амплитуды колебаний
Одно колебательное движение выполняется вдоль оси X, другое — вдоль оси Y. Колебания гармоничны.
1) Частоты и фазы колебаний одинаковы, а амплитуды различны.
2) Частоты колебаний одинаковы, амплитуды различны. Фазы, складывающиеся колебания отличаются друг от друга на .
Определите, каковы траектории результирующих движений, если эти колебания складываются?
Запишем уравнения колебаний для каждого движения:
Чтобы найти траекторию результирующего движения, нам нужно исключить время из уравнений (2.1), (2.2). Для этого достаточно разделить по одному одно уравнение на другое, в результате получим:
Уравнение (2.3.) Показывает, что в этом случае добавление колебаний приводит к колебаниям по прямой, касательная которых определяется отношением амплитуд.
2. Пусть фазы добавленных колебаний отличаются друг от друга , то уравнения имеют вид:
Чтобы найти траекторию результирующего движения, исключив время, нам нужно квадратировать уравнения (2.3) и (2.4), сначала разделяя их на A1 и A2 соответственно, а затем складывая их. Уравнение траектории принимает вид:
Это уравнение эллипса. Для любых начальных фаз и любых амплитуд двух смещающихся взаимно перпендикулярных колебаний той же частоты результирующее колебание будет эллиптическим. Его ориентация будет зависеть от фаз и амплитуд добавленных колебаний.
1) В этом случае добавление колебаний приводит к тому, что колебания происходят по прямой, наклон которой равен
2) Траектория результирующего движения является эллипсом.
http://skysmart.ru/articles/physics/garmonicheskie-kolebaniya
http://www.homework.ru/spravochnik/uravnenie-kolebanij/