iSopromat.ru

Уравнения Лагранжа второго рода, которые представляют собой дифференциальные уравнения второго порядка относительно обобщенных координат.


Для такой системы можно записать s уравнений, которые называются уравнениями Лагранжа второго рода или дифференциальными уравнениями движения в обобщенных координатах:
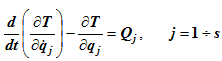
Уравнения Лагранжа второго рода могут быть обобщены на случай связей, осуществляемых с трением, хотя они и не являются идеальными. Для этого следует силу трения перенести из группы сил реакции в группу активных сил, тогда связь с трением можно формально считать идеальной.
Уравнения Лагранжа второго рода представляют собой дифференциальные уравнения второго порядка относительно обобщенных координат q1, q2,…qs.
Дважды интегрируя эти уравнения и определяя по начальным условиям постоянные интегрирования, получим систему уравнений движения в обобщенных координатах:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Принцип наименьшего действия в аналитической механике
Причина данной публикации — неоднозначная статья на тему принципа наименьшего действия (ПНД), опубликованная на ресурсе несколько дней назад. Неоднозначна она потому, что её автор в популярной форме пытается донести до читателя один из основополагающих принципов математического описания природы, и это частично ему удается. Если бы не одно но, притаившееся в конце публикации. Под спойлером приведена полная цитата данного отрывка
Не все так просто
На самом деле я немного обманул, сказав, что тела всегда двигаются так, чтобы минимизировать действие. Хотя в очень многих случаях это действительно так, можно придумать ситуации, в которых действие явно не минимально.
Например, возьмем шарик и поместим его в пустое пространство. На некотором отдалении от него поставим упругую стенку. Допустим, мы хотим, чтобы через некоторое время шарик оказался в том же самом месте. При таких заданных условиях шарик может двигаться двумя разными способами. Во-первых, он может просто оставаться на месте. Во-вторых, можно его толкнуть по направлению к стенке. Шарик долетит до стенки, отскочит от нее и вернется обратно. Понятно, что можно толкнуть его с такой скоростью, чтобы он вернулся в точно нужное время.
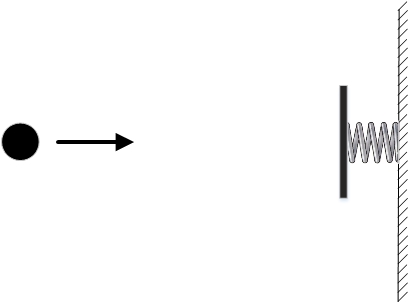
Оба варианта движения шарика возможны, но действие во втором случае получится больше, потому что все это время шарик будет двигаться с ненулевой кинетической энергией.
Как же спасти принцип наименьшего действия, чтобы он был справедлив и в таких ситуациях? Об этом мы поговорим в следующий раз.
Так в чем же, с моей точки зрения, проблема?
Проблема в том, что автор, приводя данный пример допустил ряд фундаментальных ошибок. Она усугубляется тем, что планируемая вторая часть, со слов автора, будет опираться на эти ошибки. Руководствуясь принципом наполнения ресурса достоверной информацией я вынужден выступить с разъяснением своей позиции по данному вопросу более развернуто, и формат комментариев для этого маловат.
Данная статья расскажет о том, как строится механика на базе ПНД, и постарается объяснить читателю, что проблема, которую ставит автор цитируемой публикации отсутствует.
1. Определение действия по Гамильтону. Принцип наименьшего действия


— функция Лагранжа, для некоторой механической системы, в которой (опуская аргументы в дальнейшем) T — кинетическая энергия системы; П — потенциальная её энергия; q(t) — вектор обобщенных координат этой системы, являющийся функцией времени. при этом полагают, что моменты времени t1 и t2 — фиксированы.
Почему функционал, а не функция? Потому, что функция, по определению есть правило, по которому одному числу из области определения (аргументу функции) ставится в соответствие другое число из области значений. Функционал отличается тем, что качестве его аргумента выступает не число, а целая функция. В данном случае это закон движения механической системы q(t), определенный по крайней мере на промежутке времени между t1 и t2.
Многолетние (и это мягко сказано!) труды ученых-механиков (включая умопомрачительного Леонарда Эйлера), позволили сформулировать
Принцип наименьшего действия:
Механическая система, для которой задана функция Лагранжа
, движется таким образом, что закон её движения q(t) доставляет минимум функционалу
 , движется таким образом, что закон её движения q(t) доставляет минимум функционалу
, движется таким образом, что закон её движения q(t) доставляет минимум функционалу
называемому действием по Гамильтону.
Уже из самого определения ПНД следует тот факт, что данный принцип приводит к уравнениям движения лишь для ограниченного класса механических систем. Для каких? А давайте разберемся.
2. Границы применимости принципа наименьшего действия. Некоторые определения для самых маленьких
Как следует из определения, опять таки, функции Лагранжа, ПНД позволяет получить уравнения движения для механических систем, силовое воздействие на которые определяется исключительно потенциальной энергией. Для того чтобы разобраться, о каких системах идет речь, дадим несколько определений, которые, для экономии объема статьи я помещаю под спойлер
Рассмотрим движущуюся по траектории AB точку, к которой приложена сила  . Бесконечно малое перемещение точки по траектории определяется вектором
. Бесконечно малое перемещение точки по траектории определяется вектором  , направленным по касательной к траектории.
, направленным по касательной к траектории.
Элементарной работой силы на перемещении называют скалярную величину, равную

Тогда, полная работа силы на перемещении точки по траектории AB есть криволинейный интеграл

Кинетической энергией точки T называют работу, которую должны совершить приложенные к точке массой m силы, для того чтобы из состояния покоя перевести точку в движение со скоростью


В соответствии со вторым законом Ньютона


Вычислим строго стоящее под знаком интеграла скалярное произведение, для чего продифференцируем по времени скалярное произведение вектора скорости самого на себя

С другой стороны,

Дифференцируя это равенство по времени, имеем

Сравнивая (1) и (2) приходим к выводу, что

Тогда, спокойно вычисляем работу, раскрывая криволинейный интеграл через определенный, взяв в качестве пределов модуль скорости точки в начале и в конце траектории


Пусть точка перемещается в пространстве по произвольной траектории AB. Вычислим, какую работу при этом совершит сила (3)

Так как проекции силы на оси координат зависят исключительно от этих самых координат, всегда можно найти функцию


Тогда, выражение для работы преобразуется к виду

где  — значения функции U(x, y, z) в точках A и B соответственно. Таким образом работа рассматриваемой нами силы не зависит от траектории точки, а определяется только значениями функции U в начале и в конце траектории. Такая сила называется консервативной силой, а соответствующая ей функция U(x, y, z) — силовой функцией. Очевидно, что
— значения функции U(x, y, z) в точках A и B соответственно. Таким образом работа рассматриваемой нами силы не зависит от траектории точки, а определяется только значениями функции U в начале и в конце траектории. Такая сила называется консервативной силой, а соответствующая ей функция U(x, y, z) — силовой функцией. Очевидно, что  , а так же равенство нулю работы консервативной силы при движении по замкнутой траектории. Говорят так же, что функция U(x, y, z) задает в пространстве силовое поле.
, а так же равенство нулю работы консервативной силы при движении по замкнутой траектории. Говорят так же, что функция U(x, y, z) задает в пространстве силовое поле.
Потенциальной энергией
 точки, в пространстве с заданным силовым полем, называют работу внешних сил, приложенных к ней, которую они совершают при перемещении точки в заданное координатами (x, y, z) положение в пространстве из некоторого произвольного положения, выбранного в качестве начала отсчета уровня потенциальной энергии.
точки, в пространстве с заданным силовым полем, называют работу внешних сил, приложенных к ней, которую они совершают при перемещении точки в заданное координатами (x, y, z) положение в пространстве из некоторого произвольного положения, выбранного в качестве начала отсчета уровня потенциальной энергии.
— потенциальная энергия точки в положении A, а

— потенциальная энергия точки в положении B. Учитывая всё вышесказанное снова вычислим работу потенциальных сил на перемещении из точки A в точку B

Таким образом, работа консервативных сил равна изменению потенциальной энергии точки, взятому с обратным знаком

причем выбор уровня, на котором мы считаем потенциальную энергию равной нулю совершенно не влияет на результат. Отсюда можно сделать вывод, что уровень отсчета потенциальной энергии можно выбрать совершенно произвольно.
3. Понятие о вариациях обобщенных координат. Постановка вариационной задачи

где s — число степеней свободы данной системы.
Действительный, но неизвестный пока нам, закон движения данной системы определяется зависимость обобщенных координат (4) от времени. Рассмотрим одну из обобщенных координат  , полагая аналогичные рассуждения и для всех остальных координат.
, полагая аналогичные рассуждения и для всех остальных координат.
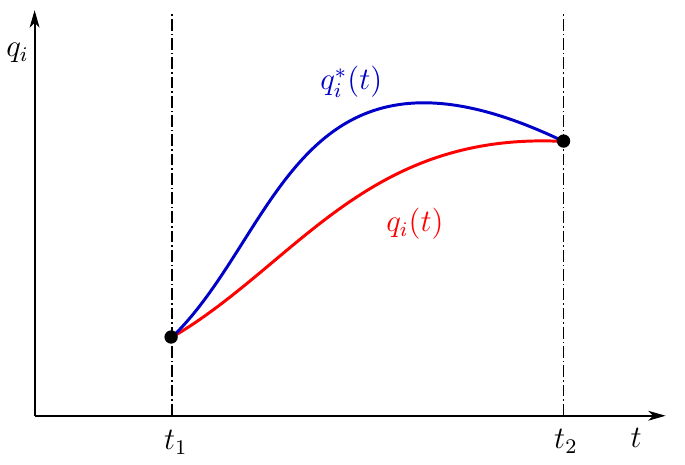
Рисунок 1. Действительное и окольное движение механической системы
На рисунке зависимость  изображена красной кривой. Выберем два произвольных фиксированных момента времени t1 и t2, полагая t2 > t1. Положение системы
изображена красной кривой. Выберем два произвольных фиксированных момента времени t1 и t2, полагая t2 > t1. Положение системы  договоримся называть начальным положением системы, а
договоримся называть начальным положением системы, а  — конечным положением системы.
— конечным положением системы.
Однако, я ещё раз настаиваю на том, чтобы нижеследующий текст был прочтен внимательно! Несмотря на то, что мы задаемся начальным и конечным положением системы, ни первое положение, ни второе, нам заранее неизвестны! Равно как и неизвестен закон движения системы! Эти положения рассматриваются именно как начальное и конечное положение, безотносительно конкретных значений.
Далее мы полагаем, что из начального положения в конечное система может придти разными путями, то есть зависимость  может быть любой кинематически возможной. Действительное движение системы будет существовать в единственном варианте (красная кривая), остальные кинематически возможные варианты будем называть окольными движениями
может быть любой кинематически возможной. Действительное движение системы будет существовать в единственном варианте (красная кривая), остальные кинематически возможные варианты будем называть окольными движениями  (синяя кривая на рисунке). Разность между действительным и окольным движением
(синяя кривая на рисунке). Разность между действительным и окольным движением

будем называть изохронными вариациями обобщенных координат
В данном контексте вариации (5) следует понимать как бесконечно малые функции, выражающие отклонение окольного движения от действительного. Малая «дельта» для обозначения выбрана не случайно и подчеркивает принципиальное отличие вариации от дифференциала функции. Дифференциал — главная линейная часть приращения функции, вызванного приращением аргумента. В случае с вариацией изменение значения функции при постоянном значении аргумента вызвано изменением вида самой функции! Мы не варьируем аргумент, в роли которого выступает время, поэтому вариация называется изохронной. Мы варьируем правило по которому каждому значению времени приводится в соответствие некоторое значение обобщенных координат!
По сути, мы варьируем закон движения, по которому система из начального состояния перемещается в конечное состояние. Начальное и конечное состояние определяются действительным законом движения, но я ещё раз подчеркиваю — их конкретные значения нам не известны и могут быть любыми кинематически возможными, мы лишь полагаем, что они существуют и система гарантированно перемещается из одного положения в другое! В начальном и конечном положении системы мы не варьируем закон движения, поэтому вариации обобщенных координат в начальном и конечном положении равны нулю

Исходя из принципа наименьшего действия, действительное движение системы должно быть таким, чтобы доставлять минимум функционалу действия. Варьирование координат вызывает изменение функционала действия. Необходимым условием достижения функционалом действия экстремального значения является равенство нулю его вариации

4. Решение вариационной задачи. Уравнения Лагранжа 2-го рода

Загоним всё под один интеграл, и так как для вариаций справедливы все операции над бесконечно малыми величинами, преобразуем этот крокодил к виду

Исходя из определения обобщенной скорости

Тогда выражение (8) преобразуется к виду

Второе слагаемое интегрируется по частям

Исходя из условия (7), имеем

тогда, получаем уравнение

При произвольных пределах интегрирования равенство нулю определенного интеграла обеспечивается равенством нулю подынтегральной функции

С учетом того, что вариации обобщенных координат независимы, (11) справедливо только в случае равенства нулю всех коэффициентов при вариациях, то есть

Никто не мешает нам умножить каждое из уравнений на (-1) и получить более привычную запись

Уравнения (12) и есть решение задачи. И вот на этом моменте ещё раз внимание — решение вариационной задачи по принципу наименьшего действия, это не функция, доставляющая минимум действию по Гамильтону, а система дифференциальных уравнений, решая которое таковую функцию можно найти. В данном случае это дифференциальное уравнение Лагранжа 2-го рода, записанное через функцию Лагранжа, то есть в формулировке для консервативных механических систем.
И всё, на этом принцип наименьшего действия заканчивается, а начинается теория обыкновенных дифференциальных уравнений, которая, в частности, гласит, что решением уравнения (12) является вектор-функция вида

где C1. C2s — произвольные константы интегрирования.
ПНД — фундаментальный принцип, позволяющий получить уравнения движения системы, для которой определена функция Лагранжа
Точка! В задачах аналитической механики вышеперечисленные выкладки больше не нужно проделывать, достаточно использовать их результат (12). Функция, удовлетворяющая уравнению (12) есть закон движения системы, удовлетворяющей ПНД.
5. Задача с шариком и стенкой
Теперь вернемся к той задаче, с которой всё началось — об одномерном движении шарика около абсолютно упругой стенки. Разумеется, для данной задачи можно получить дифференциальные уравнения движения. Так как это дифференциальные уравнения движения, то любое, я подчеркиваю это, любое их решение доставляет минимум функционалу действия, а значит ПНД выполняется! Общее решение уравнений движения шарика можно изобразить в виде так называемого фазового портрета рассматриваемой механической системы. Вот этот фазовый портрет
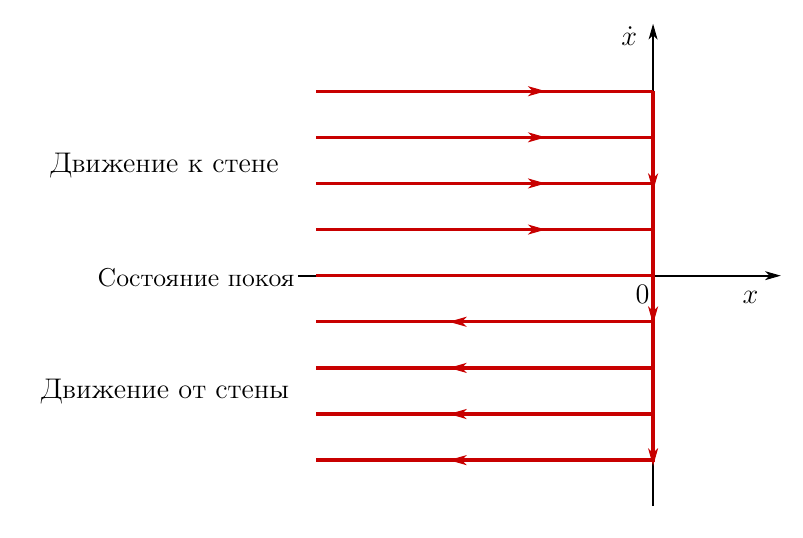
Рисунок 2. Фазовый портрет системы в задаче с шариком
По горизонтальной оси откладывается координата шарика, по вертикальной — проекция скорости на ось x. Может это покажется странным, но данный чертеж отражает все возможные фазовые траектории движения шарика, при любых начальных, или если вам так хочется, краевых условиях. На самом деле параллельных прямых на графике бесконечно много, на чертеже показаны некоторые из них и направление движения по фазовой траектории.
Это — общее решение уравнения движения шарика. Каждая из этих фазовых траекторий доставляет минимум функционалу действия, что непосредственно следует из выкладок, проделанных выше.
Что делает автор задачи? Он говорит: вот шарик покоится, и за промежуток времени от tA до tB действие равно нулю. Если шарик толкнуть к стенке, то за тот же промежуток времени действие будет больше, так как у шарика отличная от нуля и неизменная кинетическая энергия. Но почему шарик движется к стенке, ведь в покое действие будет меньше? Значит ПНД испытвает проблемы и не работает! Но мы обязательно решим это в следующей статье.
То что говорит автор — бред. Почему? Да потому, что он сравнивает действия на различных ветвях одной и той же действительной фазовой траектории! Между тем, при применении ПНД, сравнивается действие на действительной траектории и на множестве окольных траекторий. То есть происходит сравнение действия на реальной траектории с действием на тех траекториях, которых нет в природе, и никогда не будет!
Не понятно? Объясню ещё более доходчиво. Рассмотрим состояние покоя. Оно описывается ветвью фазового портрета, совпадающего с осью абсцисс. Координата не меняется с течением времени. Это действительное движение. А какое же движение будет окольным. Любое другое кинематически возможное. Например малые колебания шарика около рассматриваемого нами положения покоя. Задача допускает колебания шарика вдоль оси х? Допускает, значит такое движение кинематически возможно и может рассматриваться как одно их окольных
Почему же шарик таки покоится? Да потому, что действие в состоянии покоя, вычисленное на фиксированном промежутке времени от tA до tB, будет меньше действия, при малых колебаниях на том же промежутке времени. Значит колебаниям и любому другому «шевелению» шарика природа предпочитает покой. В полном соответствии с ПНД.
Допустим мы толкнули шарик в сторону стенки. Пусть мы толкнули его как хочет автор, со скоростью, подобранной из краевых условий, так чтобы в момент времени tB шарик оказался в том же положении, откуда стартовал. Шарик, с постоянной скоростью долетит до стенки, упруго отскочит и вернется в начальное положение в момент времени tB, опять таки с постоянной скоростью. Ок, это действительное движение. Какое движение будет одним из окольных? Например, если шарик будет двигаться к стенке и от стенки со скоростью, меняющейся со временем. Такое движение возможно кинематически? Возможно. Почему же модуль скорости шарика не меняется? Да потому, что действие на такой фазовой траектории будет иметь минимальное значение, в сравнении с любом другим вариантом, где скорость зависит от времени.
Вот и всё. Ничего такого волшебного тут не происходит. ПНД работает безо всяких проблем.
Выводы и пожелания
ПНД — фундаментальный закон природы. Из него, в частности, вытекают законы механики, например дифференциальные уравнения движения (12). ПНД говорит нам о том, что природа устроена так, что уравнение движения консервативной механической системы выглядит именно как выражение (12) и никак иначе. Большего от него и не требуется.
Не нужно придумывать проблем там где их нет.
Уравнение Лангранжа второго рода


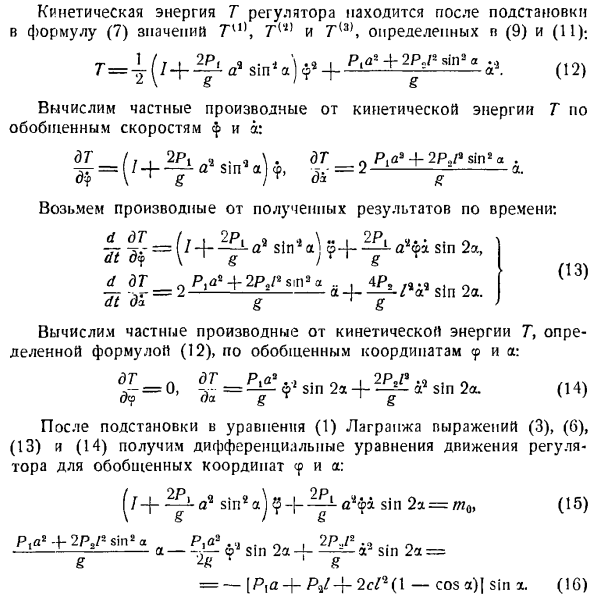
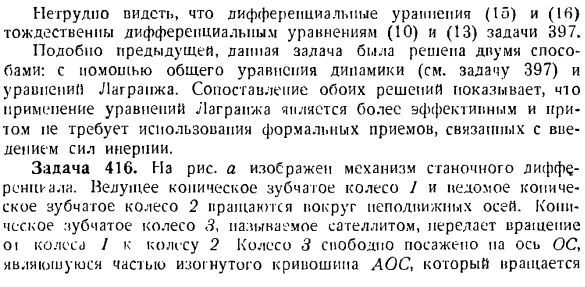


Уравнение Лангранжа второго рода
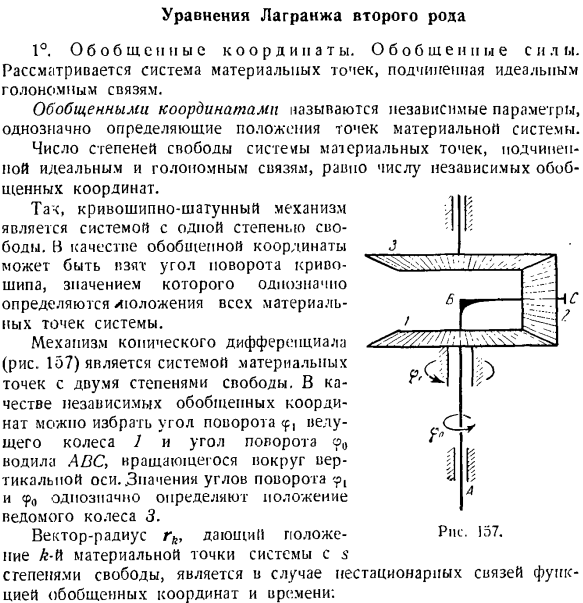
- Уравнение Лагранжа типа 2 1°.Обобщенная координата. Обобщенная сила. Рассмотрим систему материальных точек, подчиненных идеальной голономной связи. Обобщенные координаты-это независимые параметры, однозначно определяющие расположение точек материальной системы. Число степеней свободы в системе масс, подчиненных идеальным и голономным отношениям, будет равно числу независимых обобщенных координат. Механизм касания
и рукоятки система с 1 степенью freedom. As обобщенные координаты можно принять за угол поворота кривошипа, величина которого однозначно определяет расположение всех важных точек системы. Механизм дифференцирования конуса (рис. 157) представляет собой систему материальных точек с 2 степенями freedom. As независимая обобщенная координата, вы можете выбрать угол поворота
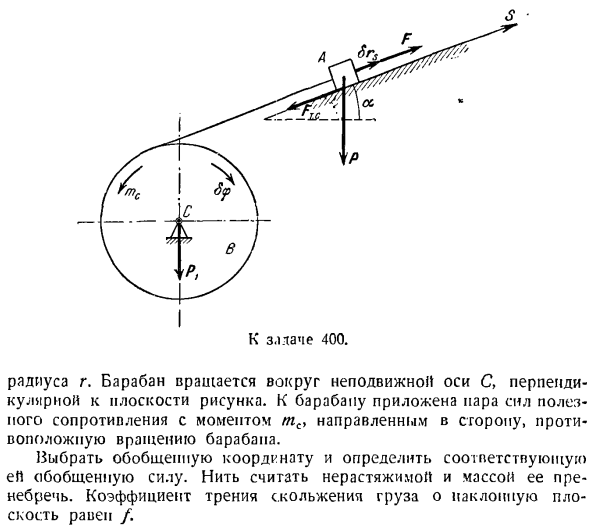
Полезная сила сопротивления приложена к барабану, с моментом направленным в противоположное направление к вращению барабанчика. Людмила Фирмаль
3. Радиус-вектор hl дает положение N-й материальной точки системы со степенями свободы, но в случае нестационарных соотношений он является функцией обобщенных координат и времени. И Да. О Рисунок 157. 400 к несчастью. Радиус города: барабан вращается вокруг неподвижной оси С, которая перпендикулярна плоскости рисунка. Выберите обобщенные координаты и определите соответствующие обобщенные силы. Нити считаются
расширяемыми, а их масса игнорируется. Коэффициент трения скольжения груза по наклонной плоскости равен/. Поэтому уравнения движения для целевой системы были составлены с использованием уравнений общей динамики в задаче 396 и 2 методов использования уравнений Лагрейджа в этой задаче. Сравнение двух приведенных методов показывает преимущества использования уравнения Лагранжа. Решите задачу n используя
- уравнение Лагранжа вместо формального введения сил инерции материальных точек системы и приведения их к простейшему виду и вычисления работы пары сил инерции относительно возможного смещения точек системы Необходимо найти обобщенную силу, составляющую лишь выражение кинетической энергии материальной системы и последующий расчет ее дифференциала. Задача 415.Решите задачу 397, используя уравнение Лагранжа. Solution. In решая задачу 397, было показано, что U-излучатель pci имеет 2 степени freedom. As обобщенные координаты, принимают угол a ом и на-стержне
а угол a ом и на-стержне Людмила Фирмаль
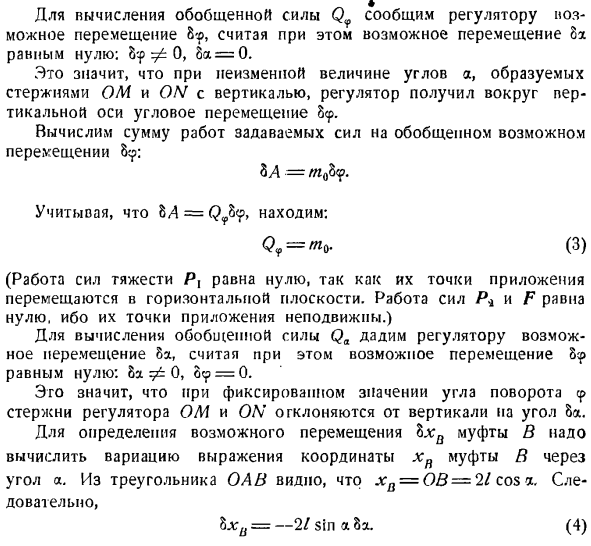
(2). Форекс-2С /(1-соз а). (2) Дадим контроллеру общее возможное смещение Sep и Sa, направленное на соответствующее увеличение угла поворота. Чтобы вычислить обобщенную силу, 8A возможно смещение, предполагая ноль, 8? ^ 0,8 а = 0. Это означает, что если угол a, образованный вертикальным стержнем OM и ON, постоянен, то регулятор получил угловое смещение 8
вычисления обобщенной силы Qa зададим регулятору возможное смещение 8a, учитывая, что возможное смещение 8
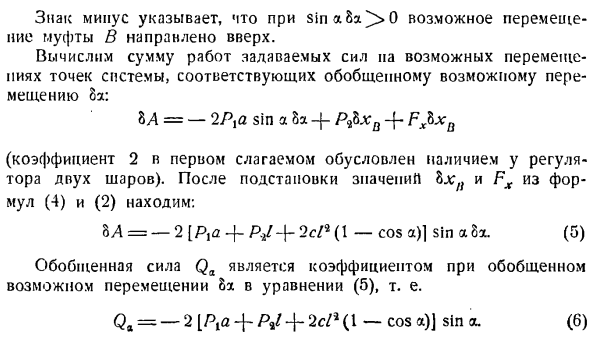
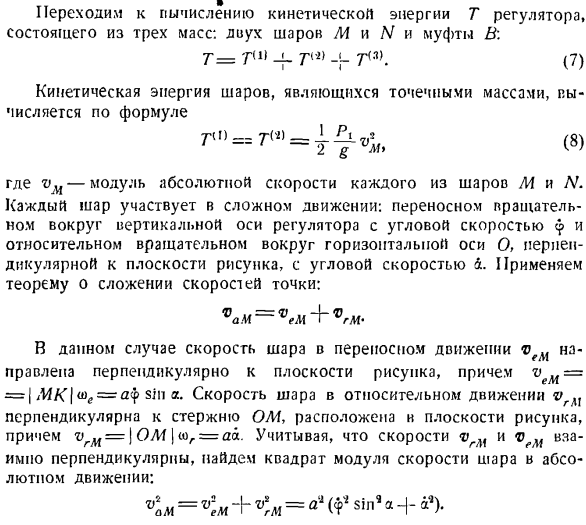
Знак минус указывает на то, что возможное движение муфты B вверх, если sin равно 8. Вычислить сумму работы заданной силы на возможном пересечении точек системы, соответствующей обобщенному возможному сдвигу 8а. В (5) (6) 8л = — 2л, sina5a-Джей-Р28лг0 + Fxbx (Коэффициент 2 в первом члене обусловлен тем, что регулятор имеет 2 шара.) Подставляя значения Lpn и Fx из формул(4)и(2), получаем: ба = — u-коэффициент абсолютной скорости для каждого из шаров M и N. каждый шар участвует в сложном движении. Угловая скорость φ-это вращение вокруг вертикальной оси регулятора, а относительное вращение вокруг горизонтальной оси O, перпендикулярной плоскости фигуры, — это угловая скорость 4.Примените теорему сложения
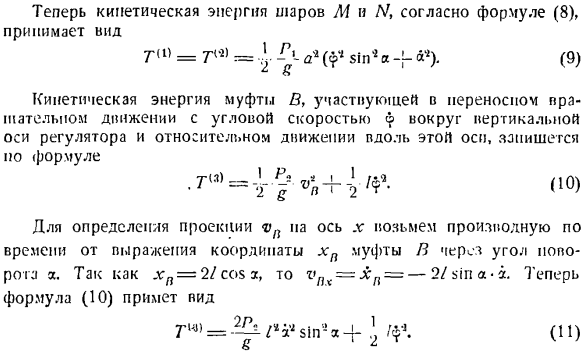
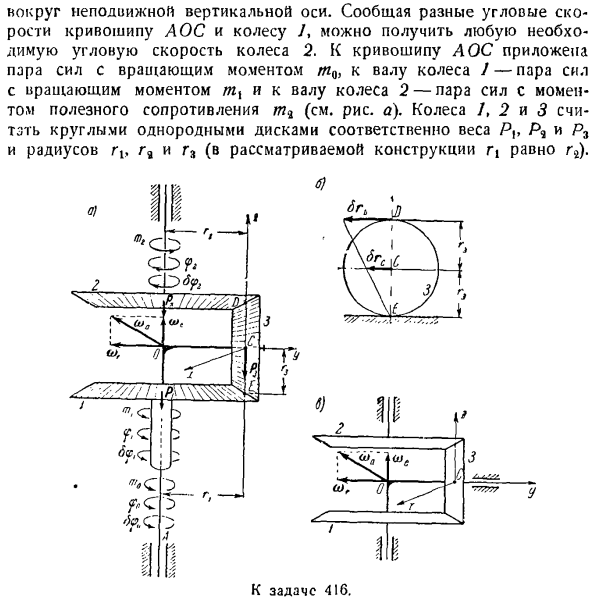
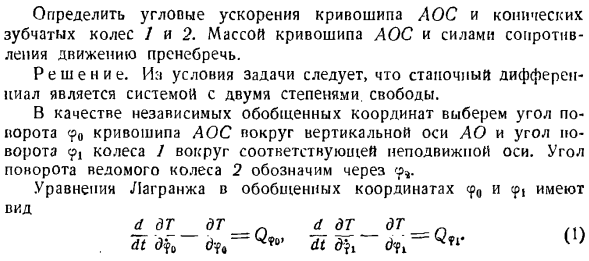
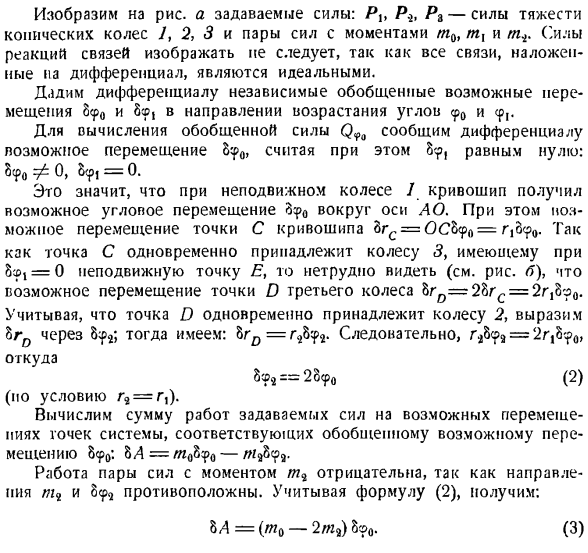
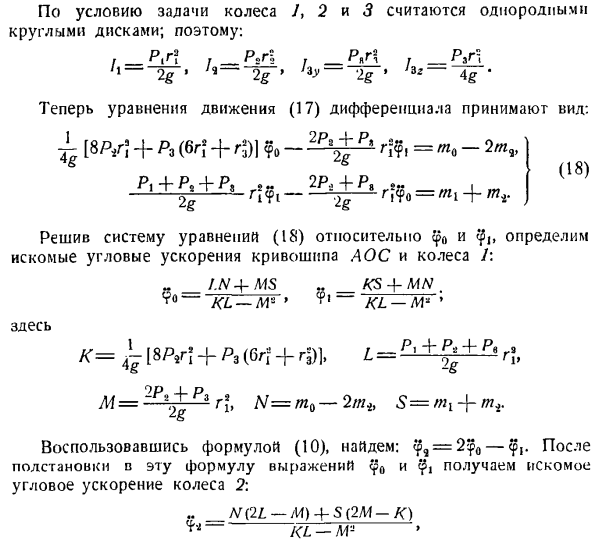
скоростей точек: МВС = = 4 J(10) возьмите производную по времени от координаты xn связи B относительно угла поворота d, чтобы определить проективное значение х + ^ + / ЗР (0 ′ −2–2 ВТ ДОЛГОТЫ、 Где©c-скорость центра тяжести колеса wv、 Абсолютная угловая скорость o) подвижные координатные оси x, y, g на колесах 3 a, 13x, / Lu, / Lg-осевой момент инерции,/ 3, x, / Zx-центробежный момент инерции Колесо меньше
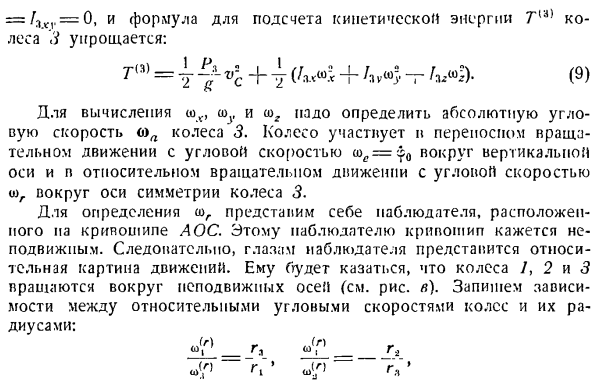
5 для соответствующих осей. Выберите начало координат оси центроида колеса 3 C. укажите вертикальную ось g горизонтально вправо вдоль относительной оси колеса 3, а ось y, а следовательно, и ось x, перпендикулярно плоскости рисунка. При аналогичном расположении координатных осей легко заметить, что они являются главной осью инерции колеса 3(колесо 3, а также колесо/и 2, считаются однородными круговыми дисками).Результат、 = / ^. = 0, и формула для расчета кинетической энергии колеса 3 т [’л) упрощается. 7″ » =1А^ +1 (/«ш+/, v, 0j.(9) для расчета wv, shu
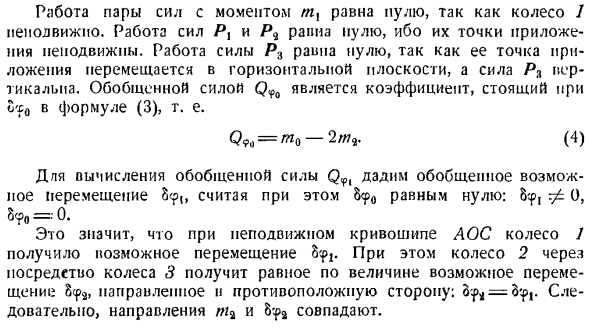
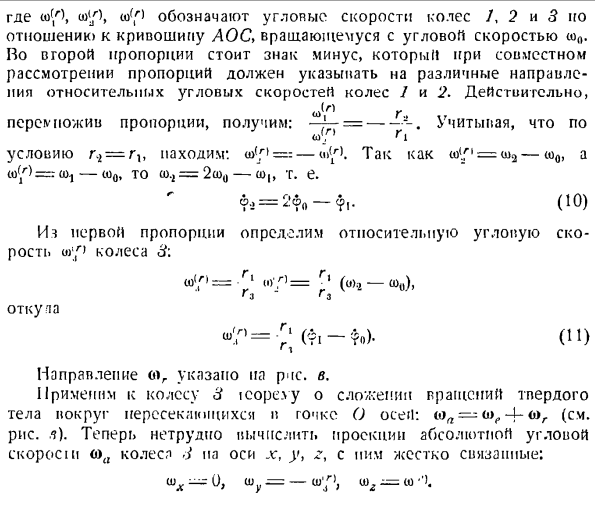
необходимо определить абсолютную угловую скорость колеса 3.Колесо участвует в переносных вращательных движениях угловой скорости вокруг вертикальной оси и относительных вращательных движениях вокруг оси симметрии колеса 3. давайте представим наблюдателя в провернуть операционной системы, чтобы определить, Вт. Для этого наблюдателя, этот чудик, кажется, не двигаться. Как следствие, относительную картину движения представляется глазу наблюдателя. Колеса/, 2 и 3, по-видимому, вращаются вокруг неподвижной оси(см. Рисунок C).Напишите зависимость между относительной угловой скоростью колеса и радиусом. Ин ый> Ин гл» Где ω, ω’.)) обозначает угловую скорость
колес/, 2 и 3 относительно кривошипа, вращающегося с угловой скоростью ω0.Однако 2-я дробь имеет знак минус, и если учесть пропорции вместе, то необходимо указать разные направления движения колеса/и относительную угловую скорость движения колеса/. 2.In факт、 Мл.) если бы непев жил в другом месте, то это было бы: — =- Условия r. 2 = для r1, a>(f> = = — CC) = = co0, а для coco1-ω0, o).2 =2ш0-ω, то есть =(Ю) Из первой дроби определите относительную угловую скорость»•/ » колеса 3: / «(| Гг)= т«(о).2-О)
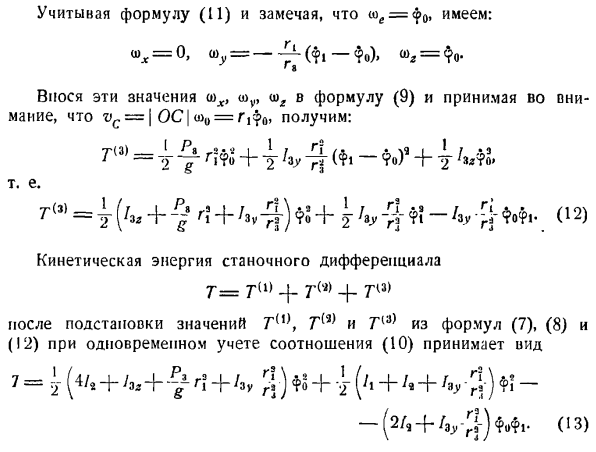
0)、 ч’3 Возмещение (?.- ? «) •(Р) Р \ Направление масла указывается кружевом. е. Для добавления жесткого вращения вокруг пересекающихся осей применим icopevy к колесу 3: ioa — <> e + o > r(см. Рисунок? это не. Теперь нетрудно вычислить проекцию абсолютной угловой скорости G).x), колесо 3 па на оси y-z, плотно соединенное с ним. 0, Ву = — си/’, — со*). Принимая во внимание формулу (11) и отмечая ее=φ0, получим: о) = 0,о>>, =—(ти — > о ^ = Введем эти значения 0 и φ и получают производную полученного результата по времени. Мы это выясним: я£= + + + /—))»-(2 /、+ liy-r±) — ЗУ
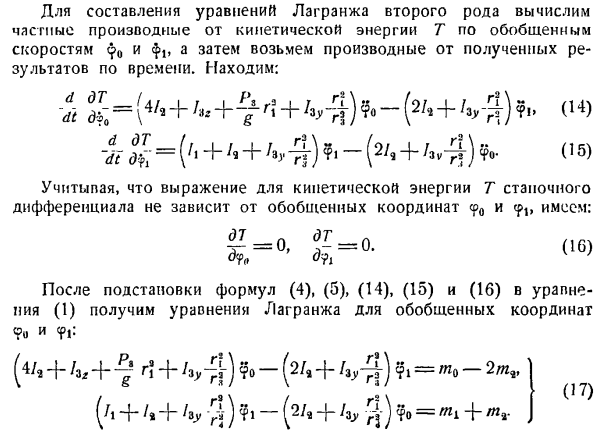
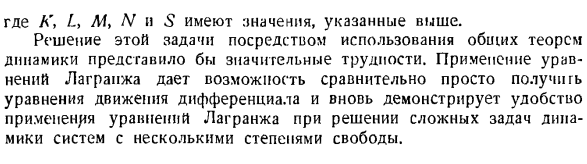
—)7г » y3g- 2г 1 ^ г> ’Б-2г’ 4г ’ Уравнение движения дифференциала (17) принимает вид: (18) ^ [8П р?, Л = п— 2М з = мл + Ми. Используя формулу(10), вы получаете следующую формулу:$ 9 = 2?0 — подставив n в это выражение, получим искомое угловое ускорение колеса 2. .. _ _N (2L-M)+ 5(2L1- Р. Г1 Здесь Ku L1U IV D S имеет значение, описанное выше.
Решение этой задачи с помощью теоремы общей динамики сопровождается большими трудностями. Применение уравнения Лагранжа позволяет относительно легко получать дифференциальные уравнения движения, и опять же удобство применения уравнения Лагранжа при решении сложных задач динамики систем с несколькими степенями свободы.
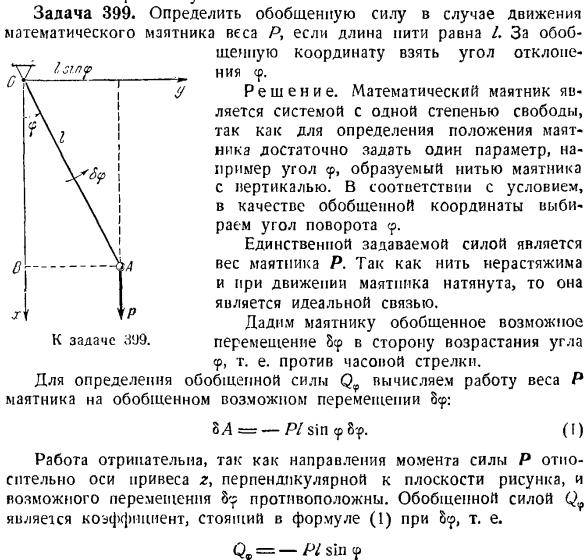
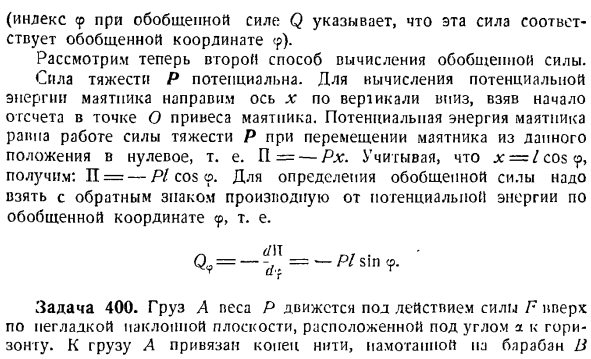
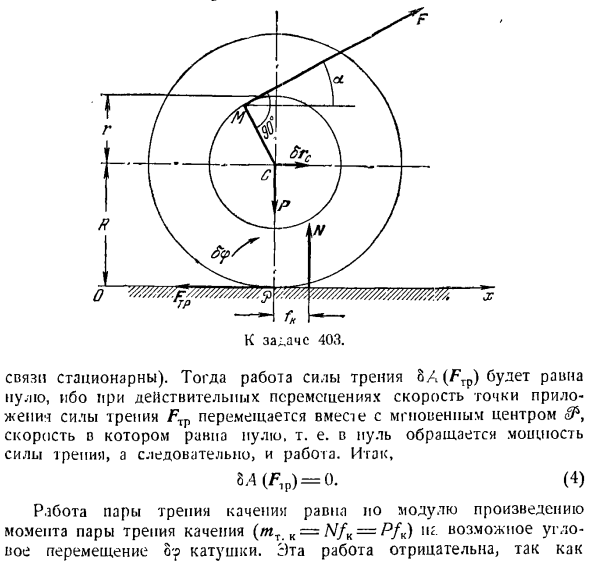
] 1алодим: Л (/>)= — Pbr5 грех, (3) Л (Ф)= Связанные С FBR, (4) БА (м с)= — фут. с8га. = — /П, потому что АБР (5) М(П)=0.((5), поскольку в точке действия силы P является фиксированной、 БА (МС)= — МЦБ = п — Зин Ин.(8) Потенциальная энергия весовой силы Р (4) равна пуле. N » 2> =0.(9 )) Потенциальная энергия. P13; сила упругости пружины F равна P(3)= 2.Если подставить значение выражения (2)、 =РР *(1-а°) 2. (10 )) Используя выражения (8), (9) и (10), запишите выражение (2) в следующем виде: = = P, sino -> — для R ’ 2(1-cos?2). (И) Для вычисления обобщенной силы объекта, обобщенная координата
В9 =—[РХ с COS в 09 =
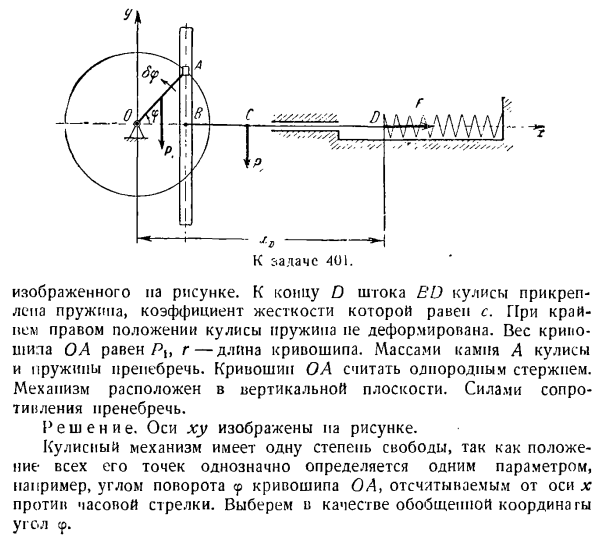
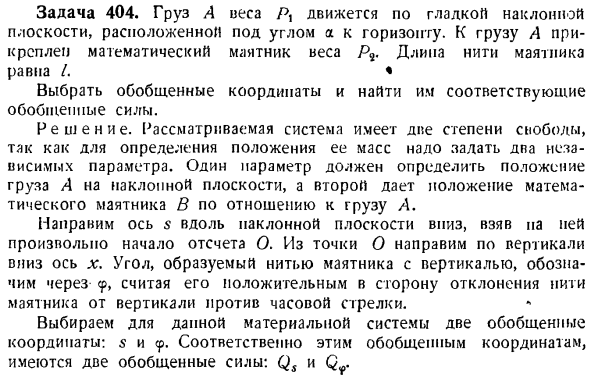
、 К М(ф)= + БГС(б) Примените Формулы(3), (4), (o) и (G)для описания (2) в виде: +(7) Обобщенная сила Q является коэффициентом пропорциональности формулы OG (7). Р Проблема 404.Груз а перемещается по гладкой наклонной плоскости угла а относительно горизонтальной плоскости. Маятник веса прикреплен к грузу A. длина строки маятника/. 」 Выберите обобщенные
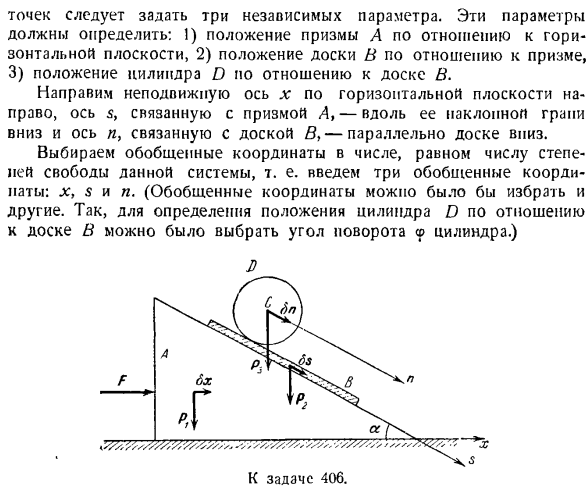
ие. Поскольку для определения местоположения массы необходимо задать 2 независимых параметра, рассматриваемая система имеет 2 степени свободы. 1. один параметр определяет положение груза A на наклонной плоскости, а второй параметр определяет положение математического маятника B относительно груза A. Возьмите начало отсчета O случайным образом и направьте ось s вниз по склону. От точки O, точка вниз по оси x вертикально. Угол, под которым маятниковые нити перпендикулярны, обозначается
этой материальной системы: 5 и 9.В соответствии с этими обобщенными координатами существуют 2 обобщенные силы: Qs и Qr Показывает силу установки системы. Px-вес груза, P4-вес маятника B. Она не должна показывать силу реакции сцепления, так как все соединения, приложенные к системе, идеальны(когда система движется, плоскость становится гладкой, а вытянутые нити растягиваются). Дает системе 2 независимых обобщенных возможных перемещения. В формуле определения возможных перемещений БРК
обращает внимание читателя на то, что 1 член меньше формулы ® ). (5) Примените Формулы (4) и (5), затем напишите (3) и pide. П=-(Р,• -) — P4) 5 sin a-Р2 / cos теперь вы можете легко определить желаемую обобщенную силу. М,= — Г = — ^ [- (Р, — ’ \ РФ) с грех-Р, / Кос =(П+ а) грех、 В9 = — Ф = — у [- (РІ-Р М) ООО 《. — Пи Джей, Кос? / =- м / СР грех. Решая следующую задачу, мы можем объяснить обоснованность применения этого метода расчета обобщенных сил в случае систем с несколькими степенями свободы, в которых существуют только потенциальные заданные силы. Задача
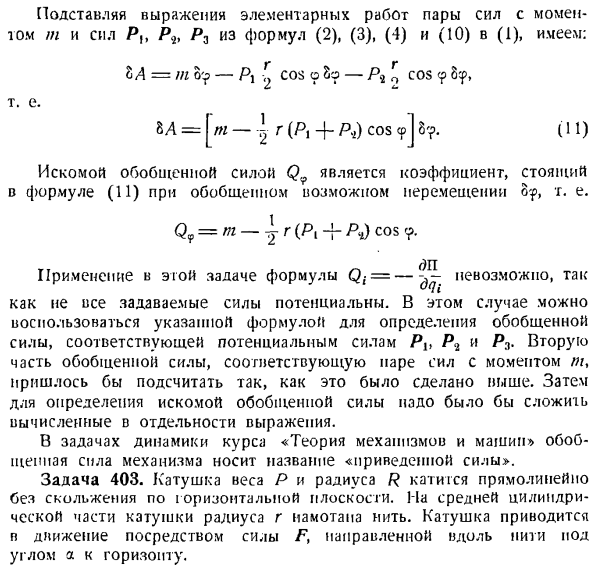
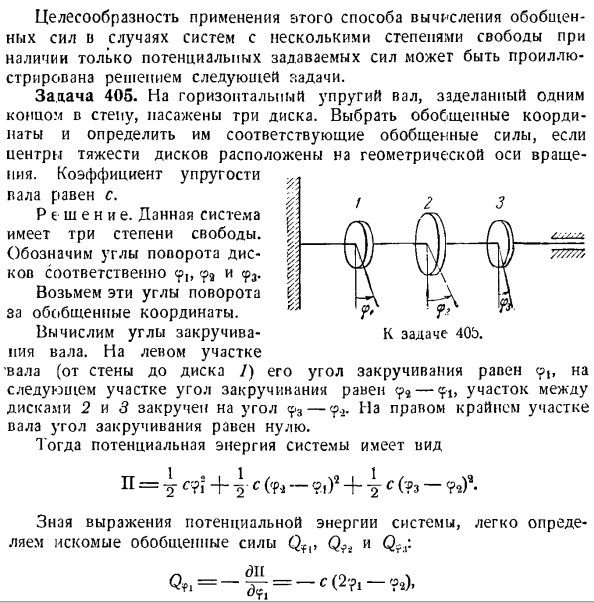
405.Установите 3 диска в герметичный горизонтальный эластичный вал на одном конце ступени. Если центр тяжести диска находится на геометрической оси вращения, выберите обобщенные координаты и определите соответствующие обобщенные силы. Модуль упругости вала равен S. Решение. В этой системе есть 3 степени свободы. Указывает угол поворота диска, соответственно.9, cp9 и
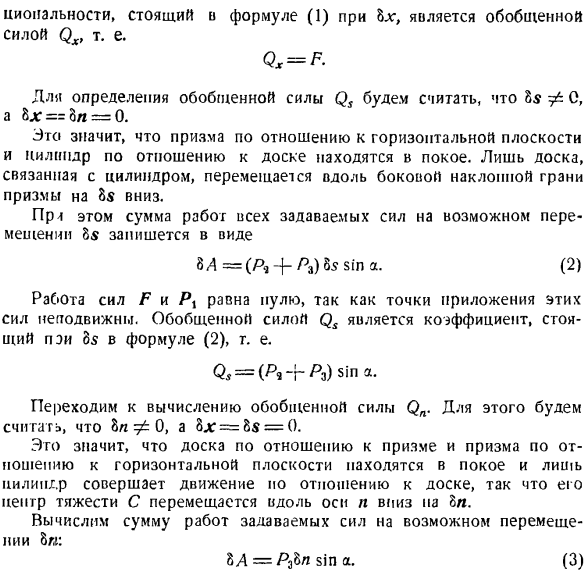
социальная природа Формулы (1) bx-это обобщенная сила Qx. QX = R Предположим, что 8sΦ0 и bx = = op = 0 определяют обобщенную силу Qs. Это означает, что цилиндр неподвижен относительно призмы и платы относительно горизонтальной плоскости. Только плата, соединенная с цилиндром, движется вниз по боковой наклонной плоскости призмы 8s. Например, сумма работы всех сил, приведенных с возможным смещением в 8 секунд, записывается в виде 8 A = ( / > , + / > a) 8-секундный грех a. (2) Действие сил F и Px равно действию пули. Смысл действия этих сил в том, что они не движутся. Обобщенная сила Qs — это коэффициент,
представляющий собой 2s формулы (8). М,= (/Ви〜П3) грех. Переходим к расчету обобщенной силы Qn. So будем считать bnΦ0, bx = b $ = 0. Это означает, что призма неподвижна относительно призмы и горизонтальной плоскости, а поскольку душ перемещается относительно доски, его центроид C перемещается вниз вдоль оси n до 8l. Рассчитайте величину работы заданной силы на возможное перемещение Ln. БА = P38l грех. (3) Сила F, P и P. 2 задания равны нулю. Потому что точки действия этих сил не двигаются. Обобщенная сила Qn-это коэффициент, который находится в cn в уравнении(3). Дя = Пт греха я. Поэтому необходимая обобщенная сила имеет
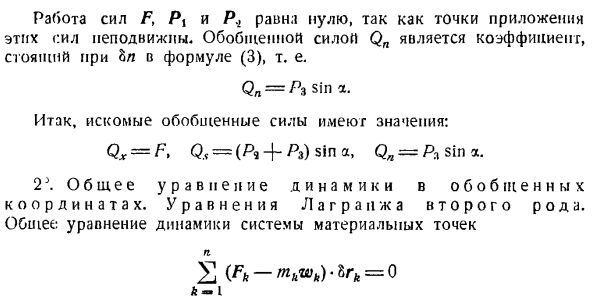
следующий смысл: Ц = ф, Qв =(Р9-п-Р3) грех,= А. грех 2 \ обобщенное уравнение динамики в обобщенных координатах.2-й вид уравнения Лагранжа. Общая формула динамики системы масс н Х(ФК-mbwk).СРК = 0 к»■я В обобщенных координатах существует форма. [д ДТ N\, д / д ДТ от N \ ,. 。 * / д ДТ от Где Q гв. QS является обобщенной координаты, КЖ> дь QS является обобщенной скоростью, и hqb непосредственного обращения обобщен Смещение системы-это
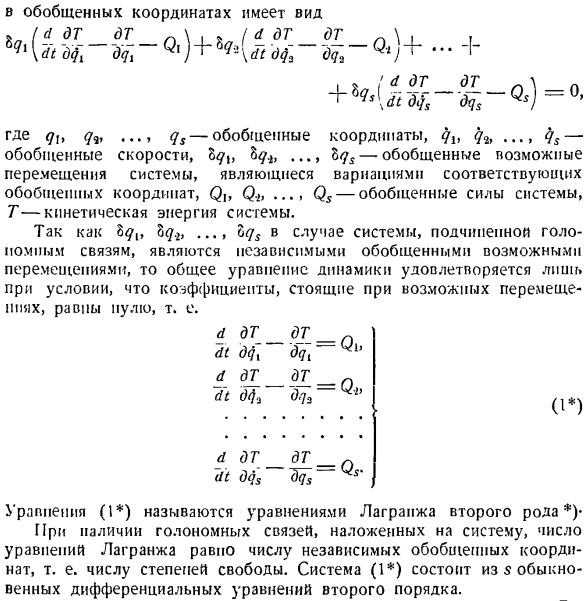
изменение соответствующих обобщенных координат Q, Q. lfQs-обобщенная сила системы, T-кинетическая энергия системы. Для систем, подчиненных полому насосу, bqy, 8q. поскольку 2i bqs является независимым обобщаемым перемещением, общее уравнение динамики удовлетворяется только условием, что коэффициент, находящийся в возможном перемещении, равен пуле. д ДТ _ ДТ _ ДТ Н йй \ dqt-КЖ> dT_dT_n д ДТ Д d dT dT_ да d’Ant C \ dq3 Ws * д ДТ dT = _dP ДТ б ’ д ы в DQS DQS с ’ * ) Такого рода уравнение Лагранжа класса 1 не рассматривается. Таким образом, приведенное ниже уравнение Лагранжа типа 2 называется просто уравнением Лагранжа. Вводя Лагранжеву функцию Lt, равную разности кинетической
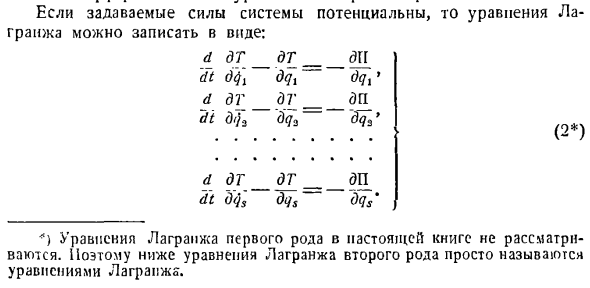
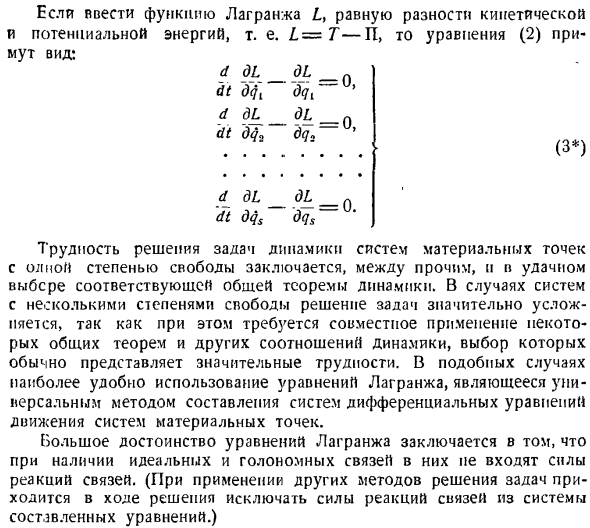
и потенциальной энергий, для L = T — P уравнение (2) принимает вид: д 0L » dl_ » в ^ Йй \ DQL по
’ (3 *) д дл _ дл n ДТ йй, ’dq3 ’ д дл дл _ г ДТ служб DQS DQS с Трудность решения задачи динамики системы материальных точек с 1 степенью свободы заключается, в частности, в успешном выборе соответствующей общей теоремы динамики. Для систем с некоторыми степенями свободы решение задачи значительно сложнее, так как решение задачи требует совместного применения общей теоремы и других кинематических relations. In в таких случаях наиболее удобно использовать уравнение Лагранжа. Уравнение Лагранжа является универсальным методом
для составления дифференциальных уравнений движения материальной точечной системы. Большое преимущество уравнения Лагранжа состоит в том, что при наличии идеальной голономной связи сила реакции связи не учитывается. (При применении других методов решения задачи сила реакции связи должна быть исключена из системы составляющих уравнений при решении задачи.)
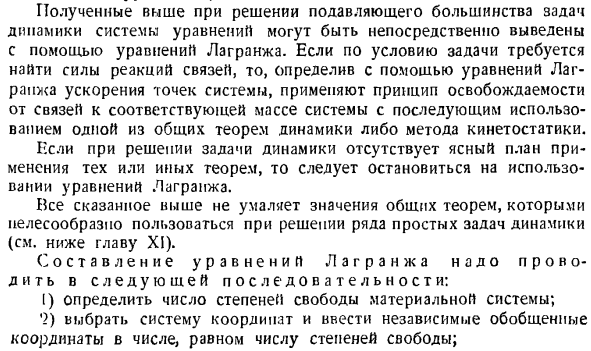
Динамика системы уравнений, полученная выше при решении большинства задач, может быть выведена непосредственно с помощью уравнения Лагранжа. В зависимости от условия задачи, когда необходимо найти реакцию связи, уравнение Лагранжа используется для определения точки ускорения системы, применяя принцип освобождения связи к соответствующей массе системы и используя либо теорему общей динамики, либо метод
кинетической статики. При решении задач в динамике, когда нет четкого плана применения тех или иных теорем, необходимо отказаться от использования уравнения Лагранжа. Все вышесказанное не умаляет важности теоремы в целом. Общие теоремы рекомендуется использовать при решении некоторых простых задач динамики (см. главу XI ниже). Составление уравнения Лагранжа следует проводить в следующем порядке: I) определяет число степеней свободы в материальной системе. ’> ) Выберите систему координат и введите число независимых обобщенных координат, равное числу степеней свободы. 3) определяет
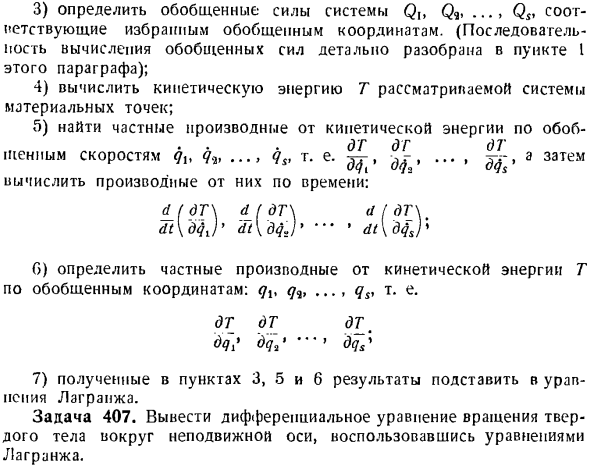
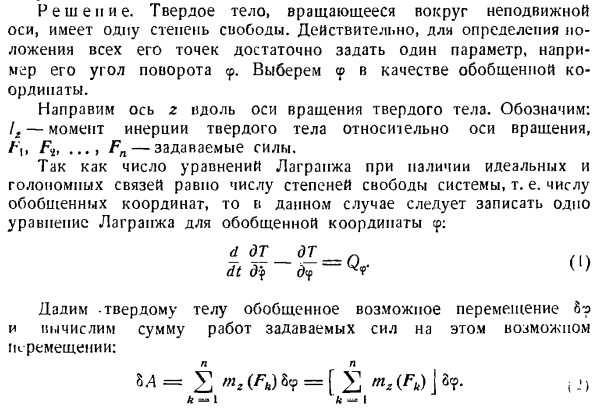
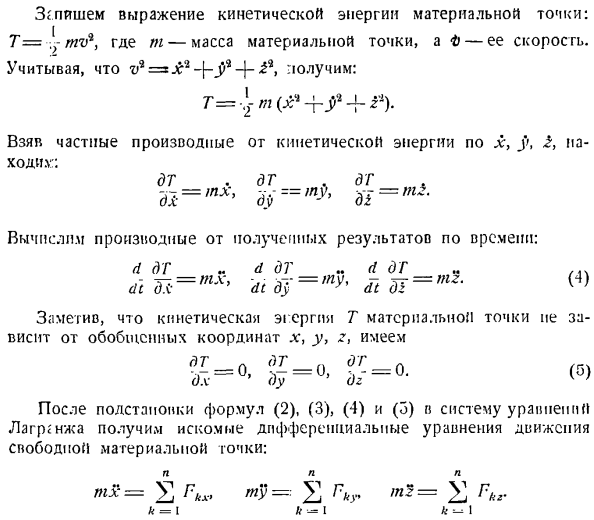
обобщенные силы Q, Q, Qs системы, соответствующие выбранным обобщенным координатам. (Процедура расчета обобщенной силы подробно описана в пункте I настоящего раздела.) 4) вычислить кинетическую энергию t системы рассматриваемых материальных точек. 5) найти частные производные кинетической энергии в сумме 。 。 。 дециграмм Скорость 7) подставьте результаты, полученные в разделах 3, 5 и 6, в уравнение Лагранжа. Проблема 407.Уравнение Лагранжа используется для получения дифференциальных уравнений для вращения твердого тела вокруг неподвижной оси. Решение. Твердое тело, которое вращается вокруг неподвижной оси, имеет 1 градус freedom. In дело в том, что для определения местоположения всех точек достаточно задать
1 параметр, например, угол поворота
заданных при этом возможном смещении: 8-4 = 2 Сус 8? = [Тртп») J Я) к-1 к-я Обобщенная сила Q9 — это коэффициент, который находится в Формуле (2). Q,= X’M ^ a). (3) К 1 ноября. Кинетическая энергия твердого тела вращающегося вокруг неподвижной оси имеет следующий вид Вычислите частную производную кинетической энергии относительно обобщенной скорости ДТ, нет. А затем возьмите производную по времени от результата: д ДТ г Дж \ ДТ с = ’А — Заметим, что кинетическая энергия массы T не зависит от обобщенных координат x, y, z、 ДХ ды-б£ — (о> Формула(2)、(3)、(4)и (3) присваивается системе уравнений Лагр ГHkY> = X 17кг k = I k I fe ^ 1 Он от потенциальной энергии системы в соответствии с соответствующими обобщенными
координатами, т. е. dqi ’ Где r = 1,2,…、 Расчет обобщенных сил материальной системы является одним из ключевых этапов решения задачи с использованием 2-го уравнения Лагранжа. 1. Решение о обобщенной силе может быть осуществлено двумя способами: а)наиболее распространенным приемом является вычисление обобщенной силы в виде коэффициента, выражающего сумму основных действий данной силы и соответствующего обобщенного возможного displacements. In в этом случае расчет обобщенных сил следует проводить в следующем порядке: 1) исследуйте число степеней свободы в рассматриваемой системе масс и выберите
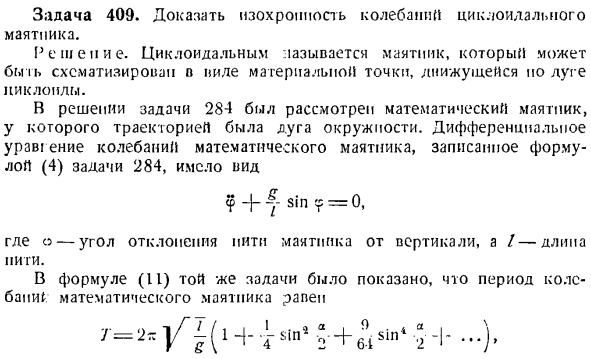
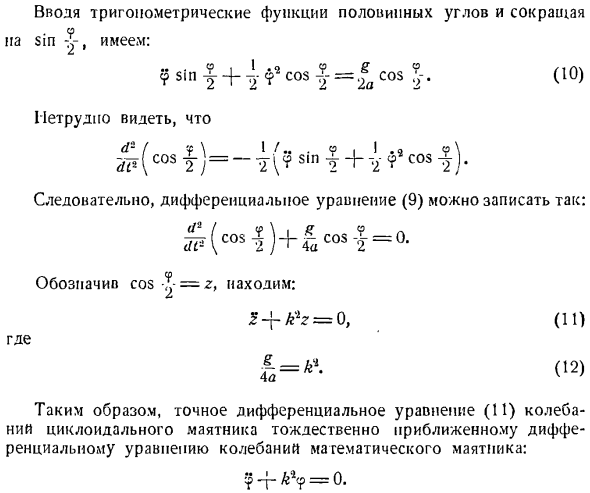
соответствующие обобщенные координаты. 2) показать всю настроенную мощность системы. 3)Если все связи, наложенные на материальную систему, не идеальны, добавьте к данной силе соответствующую реактивную силу связи (силу трения и т.). 4) число обобщенных координат, то есть равное числу степеней свободы в материальной системе, дающее системе независимое обобщенное возможное смещение. Проблема 409.It доказывается изохронизм колебаний циклоидального маятника. Решение. Маятник называется циклоидой и может быть отображен как материальная точка, которая движется по дуге окружности циклоиды. При решении задачи 284 учитывался математический маятник, в котором дуга является орбитой. Дифференциальный звук колебаний математического маятника, записанный в уравнении 284 (4)、 п + £ грех? = 0、 Где о-
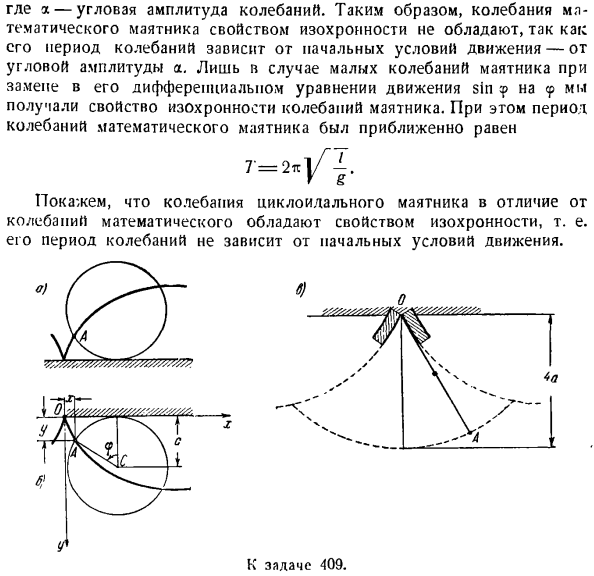
угол отклонения маятниковой нити от вертикали, а/ — длина нити. В уравнении (II)той же задачи период колебаний математического маятника г = 2.: Ил(л + Tsinl 2 + элсинт 2-я -••••). Где а-угловая амплитуда колебаний. Таким образом, колебание математического маятника не имеет изохронных свойств, так как его колебательный период зависит от начального состояния движения, то есть от угловой амплитуды a. In в случае малых колебаний маятника, при замене sin дифференциальными уравнениями движения, только
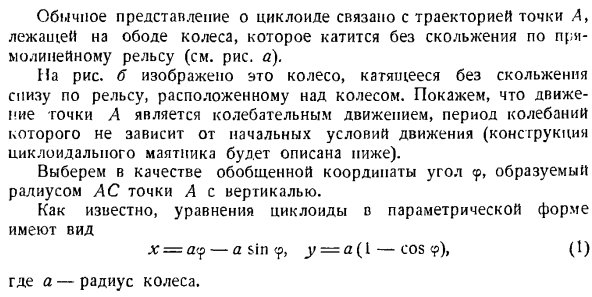
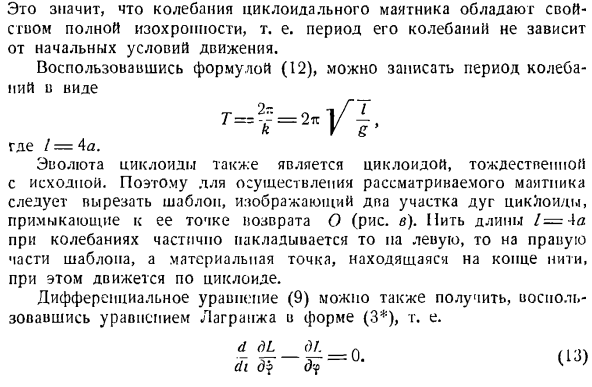
In в этом случае периоды колебаний математического маятника примерно равны Колебания циклоидного маятника указывают на то, что они обладают свойством изохронности, в отличие от математических колебаний. К выпуску 409. Обычное представление о циклоиде связано с локусом точки А, которая находится на краю катящегося колеса без скольжения по рельсу прямой линии (см. рисунок а). Па рисунке б это колесо катится по рельсу на колесе без скольжения снизу. Движение точки А
является колебательным движением, что указывает на то, что ее колебательный период не зависит от начальных условий движения (конструкция циклоидного маятника обсуждается ниже). В качестве обобщенной координаты выберите угол
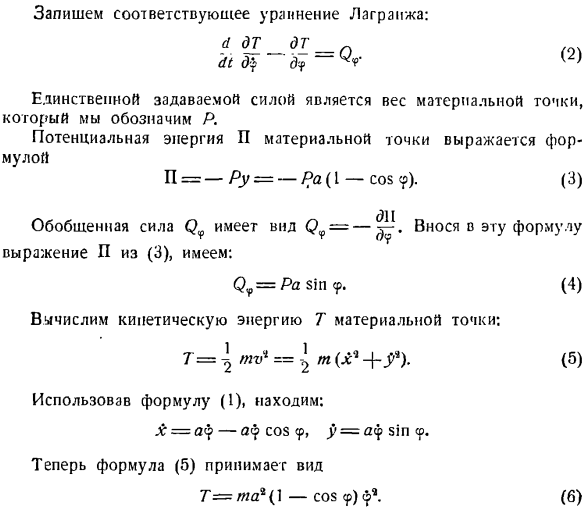
Единственной указанной силой является масса груза, обозначаемая R. Потенциальная энергия Р массы выражается формулой: Р = ру = — ра ([- а (3) Виде обобщенной силы QF-это скорострельный ЖП. Вводя Формулу (3) выражение в эту формулу: Qv = Pasin
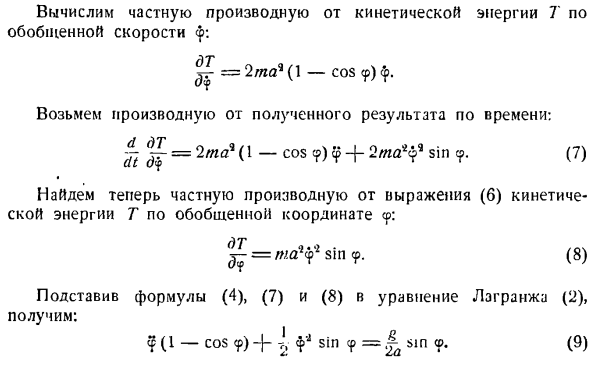
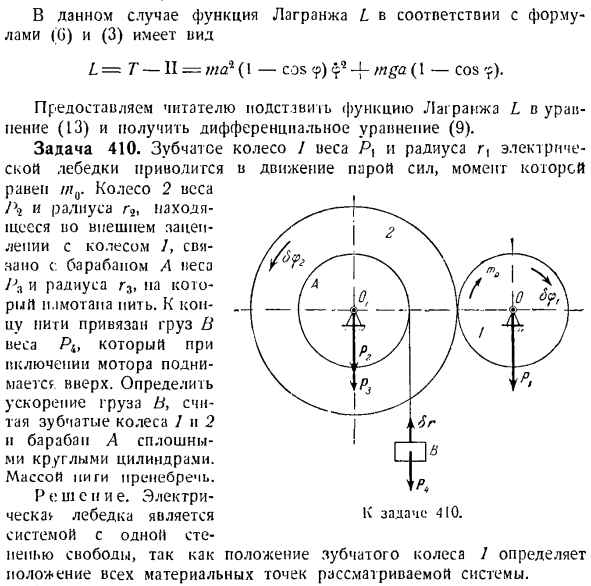
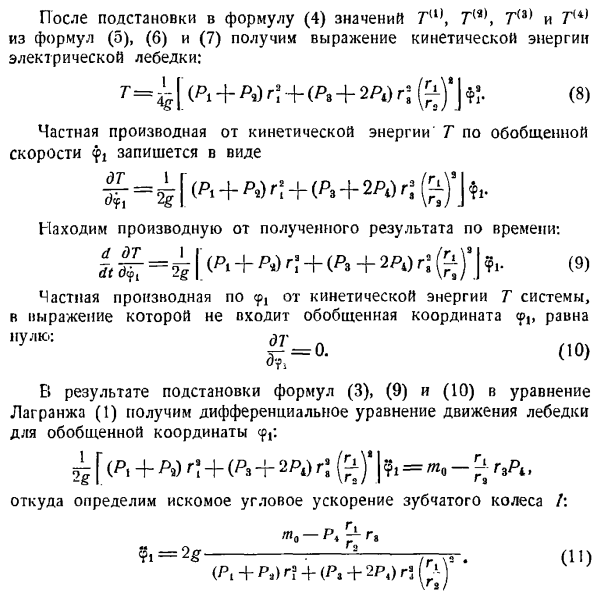
Вычислите частную производную кинетической энергии 7 ’для обобщенной скорости φ. = 2 maq (1-cos и рост нагрузки Б Б. легко видеть, ’3 Поэтому 8R = — р38 (Λ(9) Кинетическая энергия системы T (p! !- «•с」) Подставляя Формулы (3), (9) и (10) в уравнение Лагранжа (1), получаем дифференциальное уравнение движения лебедки для обобщенной координаты».. ’, / г.\ «О1) (Л + П. ^ + Л +Гротц В случае W: Pj-r^ ускорение груза B направлено вверх. в случае mQPiГ-ha ускорение нагрузки B направлено вниз. п0 = = Pk-ha, лебедка
остановлена, или вся масса движется Равномерно. Направление движения зависит от начальных условий движения. Эта задача также может быть решена с помощью дифференциальных уравнений для вращения твердых тел вокруг неподвижных осей. н / ?= 2 МЗ (ФК)> к = \ Это должно было быть составлено 2 раза.1 для шестерни, другое для остальной электрической ворота. Для Необходимо было мысленно разрушить эту систему в нижней части детали и зубчатой передачи/и 2 точках склеивания, заменив действие отброшенной части конструкции соответствующей реактивной силой сцепления. R, который составляет систему дифференциальных уравнений
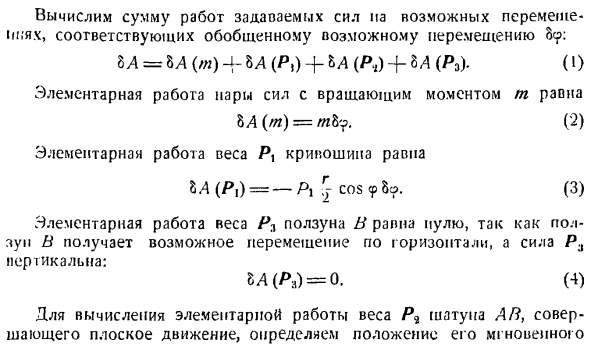
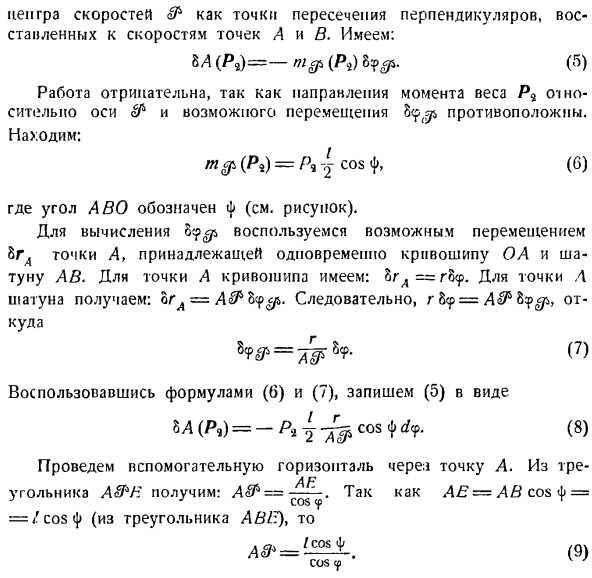
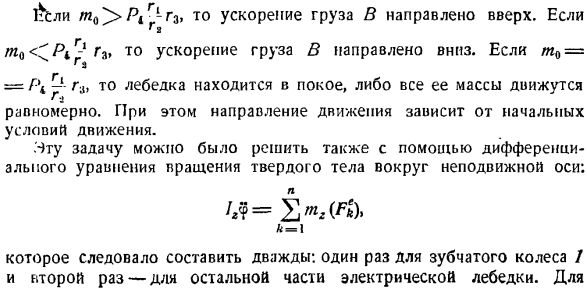
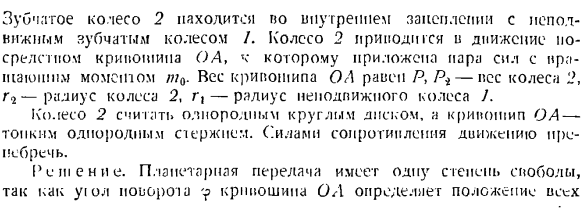
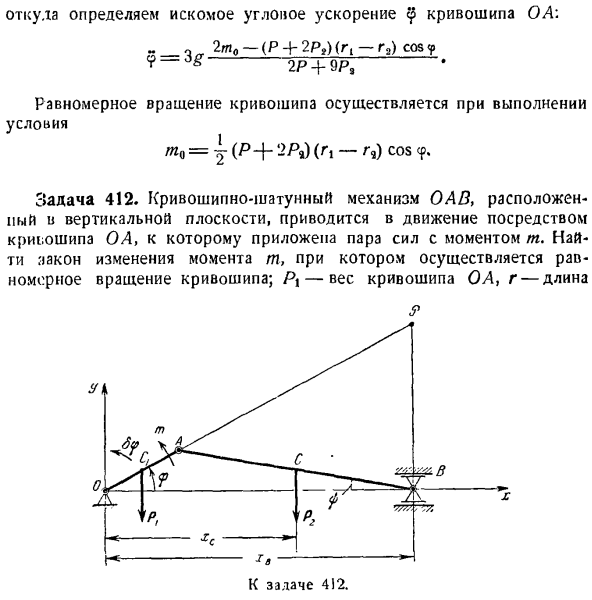
движения, включает в себя силу реакции сцепления. Только после исключения этой силы реакции из результирующей системы уравнений может быть достигнуто уравнение (11).Преимущества уравнения Лагранжа, не содержащего реакции связывания, очевидны. Задача 411.Определите угловое ускорение коленчатого вала в вертикальной плоскости. Шестерня 2 внутренне зацеплена с неподвижной шестерней/.Колесо 2 использует кривошип OA для перемещения гайки, и применяется силовая пара с крутящим моментом от// / 0 до v. Вес кривошипа OA равен P, вес колеса
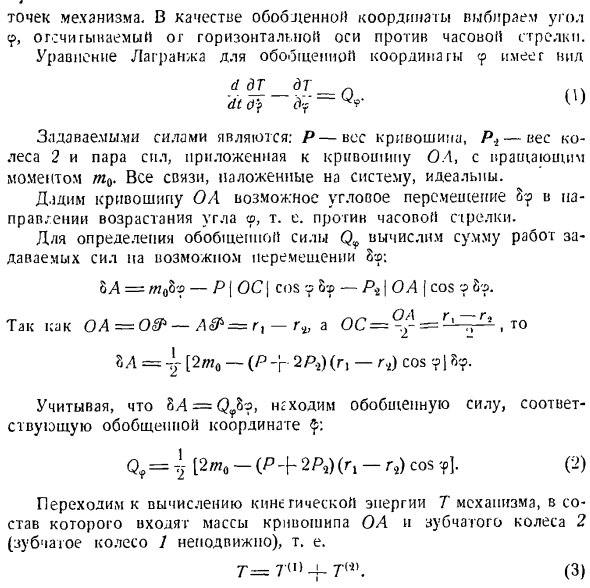
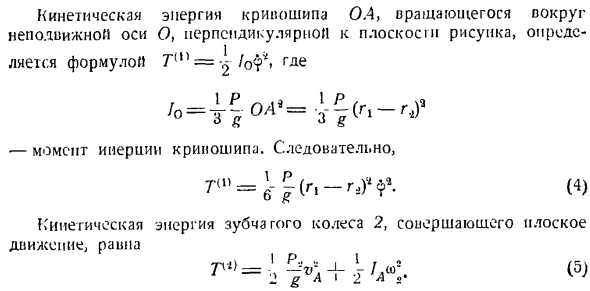
2 равен g2, радиус колеса 2 равен радиусу неподвижного колеса L Колесо 2 считается однородным круговым диском, а кривошип O / H-влажным однородным стержнем. Игнорируйте сопротивление движению. Решение. Поскольку угол поворота кривошипа ОА определяет все положения, планетарная передача имеет 1 степень свободы. Механизм действия point. As в качестве обобщенной координаты выберите угол 9, измеренный либо по горизонтальной оси, либо против часовой стрелки. Уравнение Лагранжа обобщенных
координат-Р41 0.4 [Кост и R. 0Л= 0&> — — f(3) И затем…
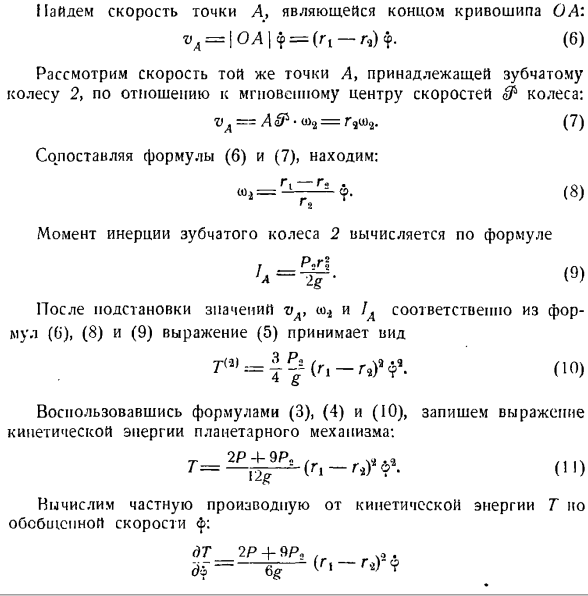
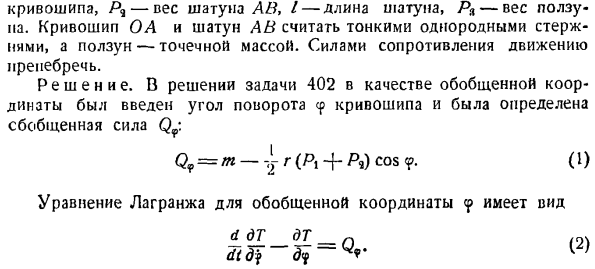
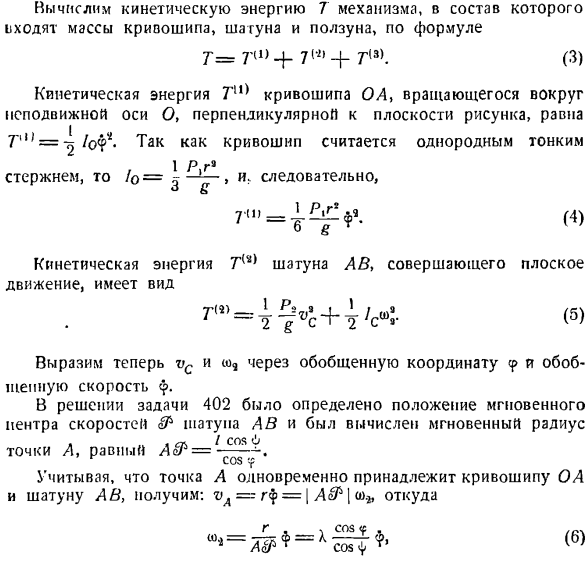
Кинетическая энергия ползучести ОА, вращающейся вокруг неподвижной оси о, перпендикулярной плоскости фигуры, вычисляется по формуле= ^ — О-я-ОА ^ л-т ^ — СБР-момент инерции кривошипа. Так… (4 )) Кинетическая энергия шестерни 2, которая совершает плоское движение Найти скорость точки А, конечную точку кривошипа ОА. ба = \ ОА \ ч =(ГУ-б) х. (6) Рассмотрим скорость той же точки А, которая принадлежит шестерне 2, относительно мгновенного центра относительно скорости колеса. vA = a iP•u = r9sh2. (7 )) Если мы сравним формулы (b) и (7), то увидим следующее: г-г.
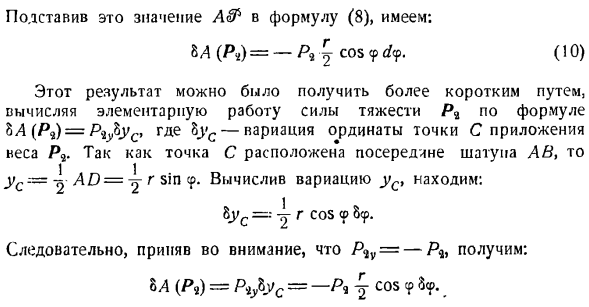
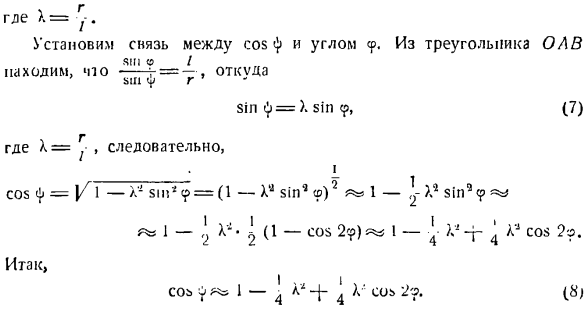
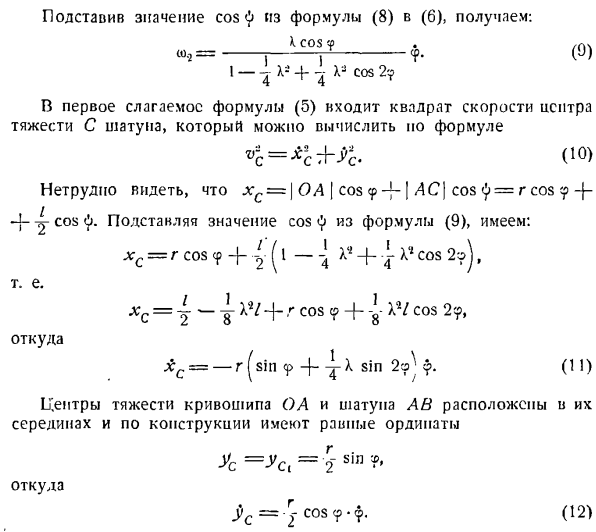
Два Момент инерции шестерни 2 рассчитывается по следующей формуле л (9) Если подставить выражения v5, coi и/ d из выражений (6), (8) и (9) соответственно, то выражение (5)будет иметь следующий вид: (У) Уравнения (3), (4) и (10) используются для описания уравнения кинетической энергии планетарного механизма. + *(ВТОРОЙ) Вычислите частную производную кинетической энергии t, но обобщенная скорость равна: dT 2P + NR、 СФ = — ЭИ -» -’»> -?В =(8)я• » А затем возьмите производную по времени от результата: Д ДГ ^ г + ОГ ^» Как- — — — (Т | Р потому выражение (9), ХС = rcos СР +(1–4 +1 х * соѕ 2? )、 Иначе говоря = Ж + р так? + ’8′); 2 / cos Откуда ■ * С = — Р(грех 9-(—^- х Sin 29 ^ 9.(11) Центр тяжести кривошипа и шатуна ОА расположен на их средней точке и имеет такую же ординату в конструкции Нам = язык yct = 2-си » б Откуда —
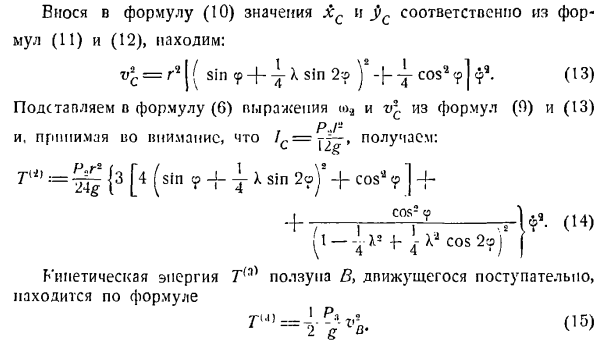
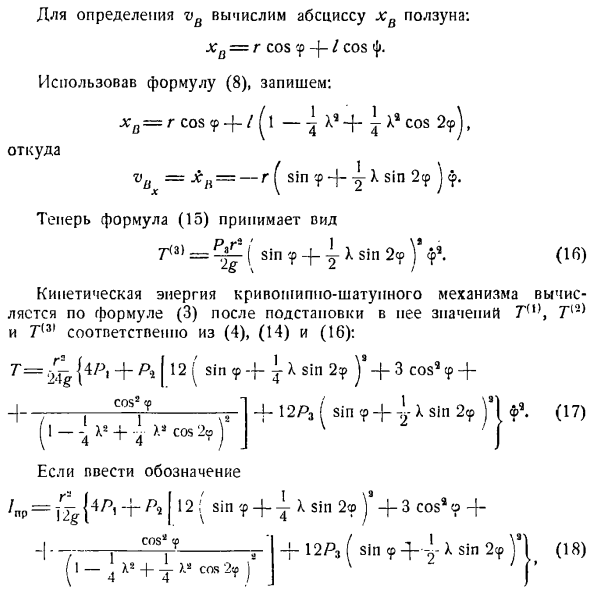
’Р£соѕ (О.- Если ввести значение xc и усов из Формулы (10) в формулы (11) и (12), то вы увидите следующее: В * = РМ(грех 9 + т х Sin 2?V-Ч Т потому что * * 9 (13 )) Формула (G) для Формулы ma и формулы (P) и (13) П /- И. Учитывая то, что мы получаем: g»»: = <3 [4 (грех?- Ф-ТХ грех + коси *] + Потому что — . потому что 2 + р *>с°с » С. От (21) Где/ pr определяется выражением
(18).Формула (21) представляет собой дифференциальное уравнение для движения кривошипно-шатунного механизма. Задача 399.Определить обобщенную силу в случае движения математического маятника массы р, Если длина нити равна/.Для обобщенных координат возьмем угол отклонения
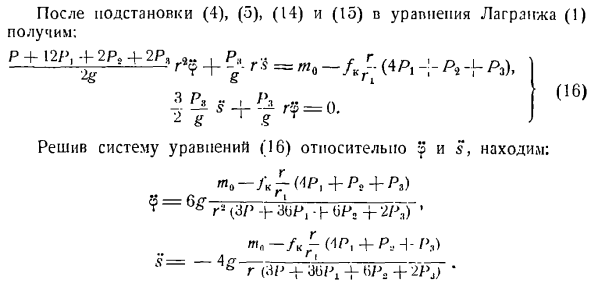
При решении обратной задачи, то есть при определении движения заданной силой, часто используется численное интегрирование, так как решение дифференциального уравнения (21) затруднено. В зависимости от состояния задачи необходимо определить закон изменения крутящего момента M. Это позволяет получить равномерный кривошип Bpauienne, или cf. Далее, она равна 3 = 0, и решение уравнения (21) относительно m дает следующий результат: Куда? + Xsin 2?(С COS Так как кинетическая энергия material материальной системы, определяемая формулой (13), не зависит от обобщенных координат cp и S.、 ДТ ДГ л (4)、(5)、(14)、подставляя и(15)в уравнение Лагранжа(1), получаем: Р + 12Р,+ 2Р, м-2Р, Р.? +£Шя (4П | п, П3)、 (16) — ?■^§- Ф Р? = Приблизительно. 1.Е Р Решая одновременно уравнения (5 и S) (16), можно видеть: = r—H aor,-h (jp, −2 /> TG ’ (Inlex
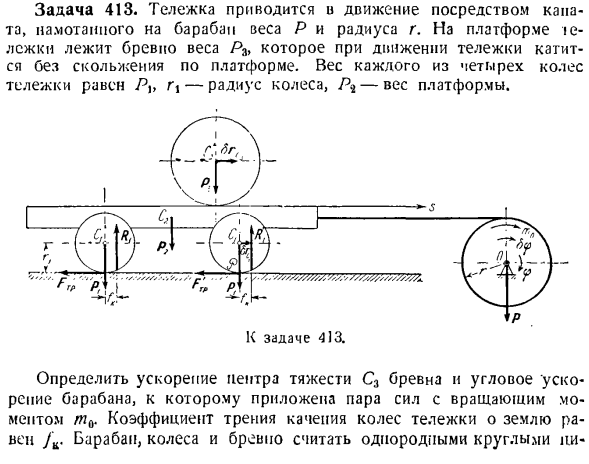
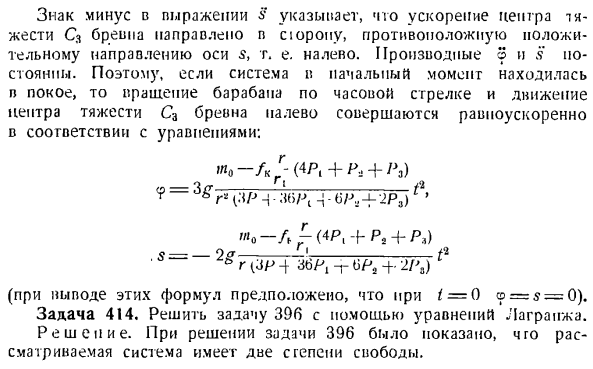
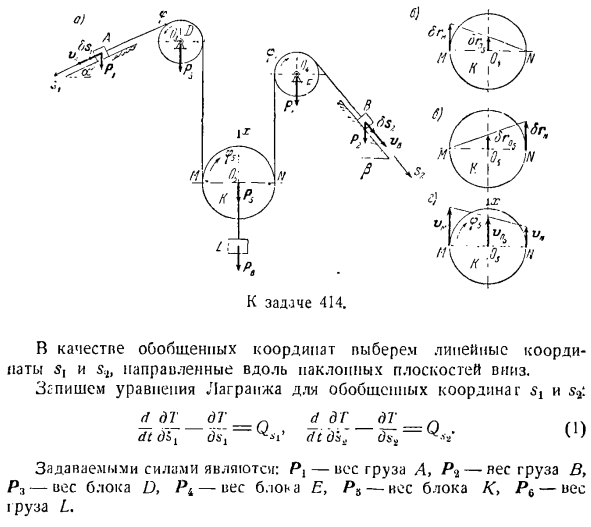
CP с обобщенной силой Q является координатой(ЛРН * — •3/л, — / — 2×3)^ ’о — / тр-н-б Р2 4 * па) o_9 а _ _ _ / 2 (При выводе этих уравнений предполагается, что/ = 0 a = s = 0.) Задача 414.Решите задачу 396, используя уравнение Лагранжа. Solution. In решая задачу 396, было показано, что рассматриваемая система имеет 2 степени свободы. В качестве обобщенной координаты возьмем линейную координату 5 |傾斜面に沿って下方に向けられたs. lt запишите уравнение Лагранжа для обобщенных координат S.< ±dT_dT_p Д ДГ г dtdli 3s] — Дидди; Ди、〜 Заранее поставленная сила:Т 7 Рг2 10 = — так、 Кинетическая энергия постепенно движущейся платформы принимает форму −2 г в•
Учитывая, что, учитывая нерасширяемость веревки a=, вы можете увидеть следующее: =(8) Колесо вагонетки сделает квартиру motion. So … R G Если момент инерции колеса равен/, = вращать — Я ЗГ. виртуальный канал Без проскальзывания vr = 5.Резьбовой стержень Ы ы ы ы Тельпо. J [если подставить значение этого vc в выражение (I)、 744)= 1.&r V + J ^ + £ (, 2) (6) Формула(7)、(8)、(9)и (12) к/(1), 7 ’(i \ T < Так как кинетическая энергия material материальной системы, определяемая формулой (13), не зависит от обобщенных координат cp и S.、 ДТ ДГ л (4)、(5)、(14)、подставляя и(15)в уравнение Лагранжа(1), получаем: Р + 12Р,+ 2Р, м-2Р, Р.? +£Шя (4П | п, П3)、 (16) — ?■^§- Ф Р? = Приблизительно. 1.Е Р Решая одновременно уравнения (5 и S) (16), можно видеть: = r—H aor,-h (jp, −2 />TG ’ (Inlex CP с обобщенной силой Q является координатой(ЛРН * — •3/л, — / — 2×3)^ ’о — / тр-н-б Р2 4 * па) o_9 а _ _ _ / 2 (При выводе этих уравнений
предполагается, что/ = 0 a = s = 0.) Задача 414.Решите задачу 396, используя уравнение Лагранжа. Solution. In решая задачу 396, было показано, что рассматриваемая система имеет 2 степени свободы. В качестве обобщенной координаты возьмем линейную координату 5 |傾斜面に沿って下方に向けられたs. lt запишите уравнение Лагранжа для обобщенных координат S.< ±dT_dT_p Д ДГ г dtdli 3s] — Дидди; Ди、〜 Заранее поставленная сила:
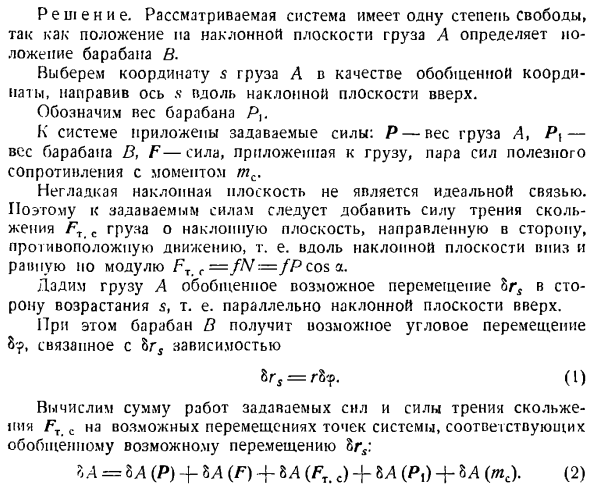
Все соединения, наложенные на систему, идеальны (так как наклонная плоскость должна быть идеально гладкой, на оси блока нет трения, а нити не растягиваются и не растягиваются). Для определения обобщенных сил QH и Q $ 2 приведем нагрузки A и B, соответственно, возможные перемещения SSj и направление, направленное параллельно линии максимального наклона наклонной плоскости в направлении увеличения координаты s.、% Чтобы вычислить обобщенную силу QS, мы даем системе обобщенное возможное смещение Ss, предполагая, что [lsq равен нулю. Φ0,=(это
возможно, потому что » и ’ в являются независимыми обобщенными координатами.) Поэтому правая ветвь потока от нагрузки B, блока E и нагрузки B до точки N останавливается. Точка м нити получает вертикальное восходящее возможное движение Lm, размер которого равен Ss, поскольку нагрузка а может перемещаться вниз из-за отсутствия удлинения нити. Определите возможное смещение оси блока Sr0, принимая во внимание, что точка/ V нити накала остается в покое в то же время (см. Рисунок B).Это равно половине модуля модульно-способного перемещения 8gL1, то есть Ох 2.2 * Ж Рассчитайте сумму работы сил, приведенных к обобщенным
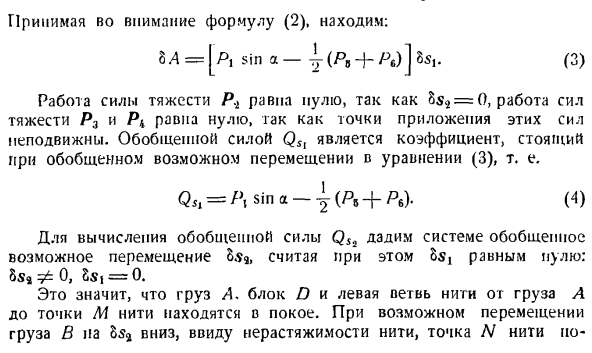
8 секундам, возможное перемещение точек системы, соответствующее возможному перемещению груза А. (В БА = РХ грех aZsi-(РВ + П6) б Рассматривая Формулу(2), можно увидеть: ал = [Р, грех-я(/> т + /> я)] та. (3) Гравитационная работа п. 2 равна пулевой, т. к.= 0, поэтому работы гравитации Р3 и Р4 равны нулю, т. к. точки приложения этих сил не перемещаются. Обобщенная сила QS1-это коэффициент, который находится в обобщенном возможном смещении уравнения (3). Под рукой-грех-у(П5 + П6). (Ля) Чтобы вычислить обобщенную силу Q $ 2, Дайте системе обобщенное возможное смещение Is, предполагая, что ОС равна пуле. Это
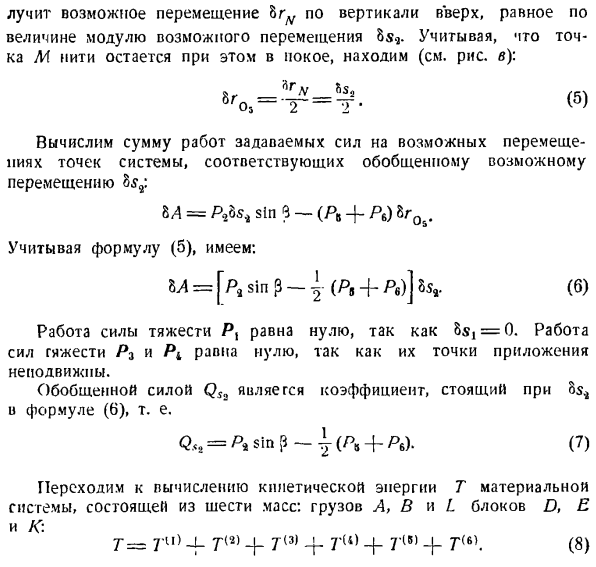
означает, что блок D груза а и левая ветвь нити а груза а находятся в точке М нити. Из-за нерастяжительного характера винта, из-за возможного перемещения нагрузки на ПА, точка N винта Излучает возможное смещение L ^вверх в вертикальном направлении. Это считается смещением и С. 3. размер равен модулю упругости. Учитывая, что точка нити M неподвижна в то же время, она выглядит так (см. Рисунок C)\ ^ О3 = =(5) Обобщенные возможные перемещения вычисляют сумму работы заданных сил на возможные перемещения точек системы, соответствующих ос4: BA = P,^ sin ft — (Pe + Pb) если рассматривать уравнение (5)、 БА = [Р4 грех? -я (П8-Ф Р6)] СУ4. (си) Работа гравитации Pt равна нулю, потому что s = 0.Работа
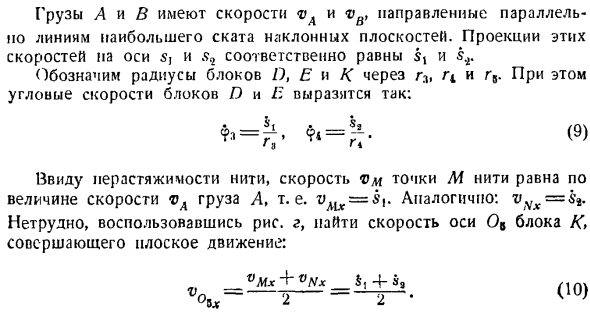
гравитации P3 и P4 равна нулю, так как их точки приложения неподвижны. Обобщенная сила QSi является коэффициентом в уравнении (6) os4. Вопрос, с = P4sin?^ Я(ЧП + П6). (7 )) Переходим к расчету кинетической энергии t материальной системы, состоящей из 6 масс: блоков D, E, K, A, B, L: м = ро ОКБ) 7(ч) Пи)пн _ [_ ППГ(г) Скорости нагрузки A и 8 fl направлены параллельно линиям максимального наклона наклонной плоскости. Проекция этих скоростей на ось s будет равна sx и s соответственно.2. Радиус блока D, E, K обозначается через r3, r4 и guard. In в этом случае угловые
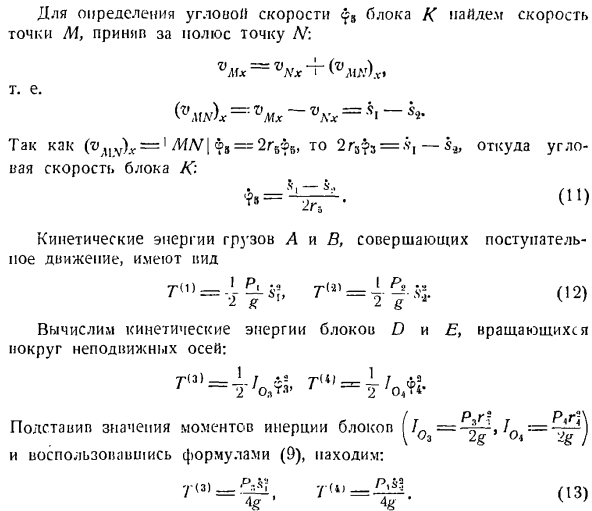
скорости блоков O и E выражаются следующим образом: (9 )) Из-за не масштабируемости нити скорость Vm точки нити M равна скорости vA груза A. R>Λ1¥=£,.Аналогично: v / Wx = 9. использование рисунка очень просто. g, найти скорость движения оси Ov блока K>do plane motion: (10 )) Девять в Два Два Чтобы определить угловую скорость блока K, найдите скорость точки M и получите точку / V полюсов. Иначе говоря (vMN) x = 1 MN \ = 2rv£6, 2r3 ’?3 = .поскольку это v, угловая скорость блока равна K’. Кинетическая энергия груза а и в、 = 1 5. .В.], (П2) Рассчитайте кинетическую энергию блоков D
и E, которые вращаются вокруг неподвижной оси. Т© — 1 / А2 Т <Я>— я СВ2 1-2 пр™ » = 2 (Р р г р р р- \ = .: = Т ^ Дж Используя формулу(9) можно увидеть: Кинетическая энергия блока K, который совершает плоское движение, определяется уравнением Т [п) ВХ — / м 2 г 2 Подставляя значение момента инерции блока к、 Формула называется (10) и (11) и вы получаете: Кинетическая энергия постепенно движущейся нагрузки L равна、 Нравится 7 ’©=.- !-7) 0.. 2(г Примените формулу (10) для определения: 74.)= я J


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://habr.com/ru/post/425771/
http://lfirmal.com/uravnenie-langranzha-vtorogo-roda/