Эстетическая медицина

История медицины: первые шаги
Из наблюдений и опыта тысячелетий, передававшегося из поколения в поколение, рождалось рациональное врачевание. Тот факт, что какие-либо случайно примененные средства или приемы приносили пользу, устраняя боль и т. п. Читать дальше

История онкологии учение о раке
Онкологические заболевания стали настоящей «чумой XX века». По причине смертности рак стоит на втором месте после сердечно-сосудистых болезней. Считается, что каждый человек — это потенциальный больной. От рака нельзя предохраниться, а излечиться очень тяжело.Читать дальше

Вирусные заболевания человека
Вирусы — мельчайшие возбудители многочисленных инфекционных заболеваний человека и животных. Являются внутриклеточными паразитами, не способными к жизнедеятельности вне живых клеток. Читать дальше

Вирусные инфекции
Острые респираторные вирусные инфекции — большая группа заболеваний, которые очень широко распространены. В этой группе выделяются аденовирусная, парагриппозная, риновирусная и сиицитиально-вирусная инфекции.Читать дальше

Вирусы. Происхождение и распростронение
Вирусы способны жить и развиваться только в клетках других организмов. Вне клеток живых организмов вирусы жить не могут, и многие из них во внешней среде имеют форму кристаллов. Читать дальше
Открытие витаминов
 В 19 веке выяснели, что пищевая ценность продуктов определяется содержанием в основном следующих веществ: белков, жиров, углеводов, минеральных солей .
В 19 веке выяснели, что пищевая ценность продуктов определяется содержанием в основном следующих веществ: белков, жиров, углеводов, минеральных солей .
Инфекция и иммунитет
 Иммунология — молодой раздел науки, но уже первые результаты ее применения в профилактике и лечении открывают широкие перспективы .
Иммунология — молодой раздел науки, но уже первые результаты ее применения в профилактике и лечении открывают широкие перспективы .
Уход за кожей
 Большое значение для внешнего облика человека имеет чистая, гладкая, приятного оттенка кожа лица. К сожалению, не всегда за ней обеспечен правильный уход .
Большое значение для внешнего облика человека имеет чистая, гладкая, приятного оттенка кожа лица. К сожалению, не всегда за ней обеспечен правильный уход .
Теории Юнга и Лапласа
В 1804 г. Томас Юнг [7] обосновал теорию капиллярных явлений на принципе поверхностного натяжения. Он также наблюдал постоянство угла смачивания жидкостью поверхности твердого тела (краевого угла) и нашел количественное соотношение, связывающее краевой угол с коэффициентами поверхностного натяжения соответствующих межфазных границ. В равновесии контактная линия не должна двигаться по поверхности твердого тела, а значит, говорил
 (1)
(1)
где sSV, sSL, sLV — коэффициенты поверхностного натяжения межфазных границ твердое тело – газ (пар), твердое тело – жидкость, жидкость – газ соответственно, q — краевой угол. Это соотношение теперь известно как формула Юнга. Эта работа все же не оказала такого влияния на развитие науки в этом направлении, какое оказала вышедшая несколькими месяцами позже статья Лапласа (Pierre Simon Laplace). Это, по-видимому, связано с тем, что Юнг избегал использования математических обозначений, а пытался описывать все словесно, отчего его работа кажется запутанной и неясной. Тем не менее он считается сегодня одним из основателей количественной теории капиллярности.
Явления когезии и адгезии , конденсация пара в жидкость, смачивание твердых тел жидкостями и многие другие простые свойства вещества — все указывало на наличие сил притяжения, во много раз более сильных, чем гравитация, но действующих только на очень малых расстояниях между молекулами. Как говорил Лаплас, единственное вытекающее из наблюдаемых явлений условие, налагаемое на эти силы, состоит в том, что они “неощутимы на ощутимых расстояниях”.
Силы отталкивания создавали больше хлопот. Их наличие нельзя было отрицать — они должны уравновешивать силы притяжения и препятствовать полному разрушению вещества, но их природа была совершенно неясной. Вопрос осложнялся двумя следующими ошибочными мнениями. Во-первых, часто считалось, что действующей силой отталкивания является тепло (как правило, мнение сторонников теории теплорода), поскольку (такова была аргументация) жидкость при нагревании сначала расширяется и затем кипит, так что молекулы разъединяются на гораздо большие расстояния, чем в твердом теле. Второе ошибочное мнение возникло из уводящего назад к Ньютону представления, согласно которому наблюдаемое давление газа происходит вследствие статического отталкивания между молекулами, а не из-за их столкновений со стенками сосуда, как тщетно доказывал Даниель Бернулли.
На этом фоне было естественно, что первые попытки объяснить капиллярность или вообще сцепление жидкостей основывались на статических аспектах вещества. Механика была хорошо понимаемой теоретической ветвью науки; термодинамика и кинетическая теория были еще в будущем. В механическом рассмотрении ключевым было предположение о больших, но короткодействующих силах притяжения. Покоящиеся жидкости (в капиллярной ли трубке или вне ее) находятся, очевидно, в равновесии, а потому эти силы притяжения должны уравновешиваться силами отталкивания. Поскольку о них можно было сказать еще меньше, чем о силах притяжения, их часто обходили молчанием, и, говоря словами Рэлея, “силам притяжения предоставлялось исполнять немыслимый трюк уравновешивания самих себя”. Лаплас[2] первым удовлетворительно разрешил эту проблему [8], полагая, что силы отталкивания (тепловые, как он допускал) можно заменить внутренним давлением, которое действует повсеместно в несжимаемой жидкости. (Это предположение приводит временами к неопределенности в работах XIX в. в отношении того, что строго понимается под “давлением в жидкости”.) Приведем расчет внутреннего давления по Лапласу. (Этот вывод ближе к выводам Максвелла [2] и Рэлея [10]. Вывод приводится по [9] .)
Оно должно уравновешивать силы сцепления в жидкости, и Лаплас отождествлял это с силой на единицу площади, которая оказывает сопротивление разделению бесконечного жидкого тела на два далеко разъединяемых полубесконечных тела, ограниченных плоскими поверхностями. Приведенный ниже вывод ближе к выводам Максвелла и Рэлея, чем к оригинальной форме Лапласа, но существенного различия в аргументации нет.
Рассмотрим два полубесконечных тела жидкости со строго плоскими поверхностями, разделенные прослойкой (толщины l) пара с пренебрежимо малой плотностью (рис. 1), и в каждом из них выделим элемент объема. Первый находится в верхнем теле на высоте r над плоской поверхностью нижнего тела; его объем равен dxdydz. Второй находится в нижнем теле и имеет объем  , где начало полярных координат совпадает с положением первого элементарного объема. Пусть f(s) — сила, действующая между двумя молекулами, разделенными расстоянием s, а d — радиус ее действия. Поскольку это всегда сила притяжения, имеем
, где начало полярных координат совпадает с положением первого элементарного объема. Пусть f(s) — сила, действующая между двумя молекулами, разделенными расстоянием s, а d — радиус ее действия. Поскольку это всегда сила притяжения, имеем
Сатир: много тестостерона
Термин «сатир» применяется для обозначения мужчины, чье половое влечение выражается необычайно мощно, в чрезмерных формах и побуждает его вести крайне напряженную, интенсивную, не знающую .
Заключение
Социально-экономические реформы происходящие в Российской Федерации, негативно сказались на положение народа, что проявилось резким ухудшением медико-демографических показателей, характеризующих со .
2. Математическое описание систем автоматического управления ч. 2.9 — 2.13
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В предыдущих сериях:
В это части будут рассмотрены:
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена).
2.10. Весовая и переходная функции звена (системы).
2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции.
2.12. Mетод переменных состояния.
2.13. Переход от описания переменных «вход-выход» к переменным состояния.
Попробуем применить, полученные знания на практике, создавая и сравнивая расчетные модели в разных видах. Будет интересно познавательно и жестко.
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена)
Рассмотрим динамическое звено САР изображенное на рисунке 2.9.1
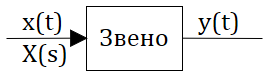
Предположим, что уравнение динамики имеет вид:

где:  — постоянные времени;
— постоянные времени;
 — коэффициент усиления.
— коэффициент усиления.
Пусть известны отображения:

Найдем изображения для производных: 

Подставим полученные выражения в уравнение динамики и получим уравнение динамики в изображениях:

B(s) — слагаемое, которое определяется начальными условиями, при нулевых начальных условиях B(s)=0.
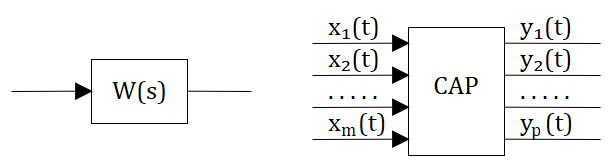
W(s) — передаточная функция.

Передаточной функцией САР (звена) называется отношение изображений выходного сигнала к входному воздействию при нулевых н.у.
После того, как в явном виде найдено изображение для неизвестной выходной величины, нахождение оригинала не представляет сложностей. Либо по формуле Хэвисайда, либо разложением на элементарные дроби, либо по таблице из справочника.
Пример
Построить выходной сигнал звена САР при единичном входном воздействии и нулевых начальных условиях, если уравнение динамики звена имеет следующий вид:


входное воздействие:  — единичное ступенчатое воздействие.
— единичное ступенчатое воздействие.
Выполним преобразование Лапласа:

Подставим в уравнение динамики и получим уравнение динамики в изображениях:

Для получения выходного сигнала из уравнения в изображениях выполним обратное преобразования Лапласа:

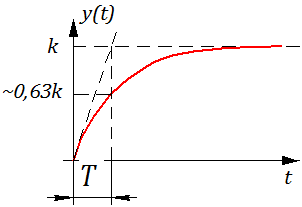
2.10. Весовая и переходная функции звена (системы).
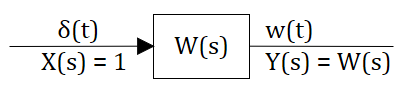
Определение: Весовой функцией звена (системы) называется реакция системы при нулевых н.у. на единичное импульсное воздействие.

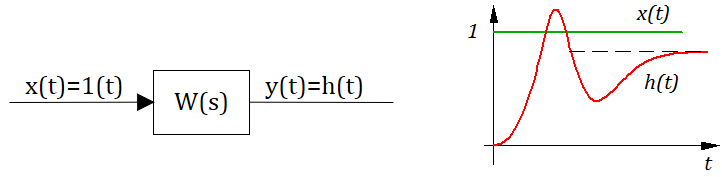
Определение: Переходной функцией звена (системы) при н.у. называется реакция на единичное ступенчатое воздействие.
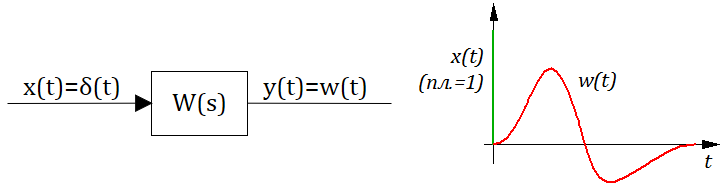
На этом месте можно вспомнить, что преобразование Лапласа это интеграл от 0 до бесконечности по времени (см. предыдущий текст), а импульсное воздействие при таком интегрировании превращается в 1  тогда в изображениях получаем что:
тогда в изображениях получаем что:

Передаточная функция играет роль изображения реакции звена или системы на единичное импульсное воздействие.
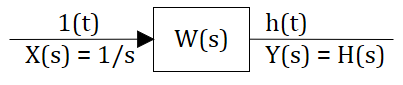
Для единичного ступенчатого воздействия преобразование Лапласа тоже известно (см. предыдущий текст):

тогда в изображениях получаем, что реакция системы  на ступенчатое воздействие, рассчитывается так:
на ступенчатое воздействие, рассчитывается так:

Реакция системы на единичное ступенчатое воздействие рассчитывается обратным преобразованием Лапласа:

2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. Формула Дюамеля-Карсона
Предположим, что на вход системы поступает произвольное воздействие x(t), заранее известное. Найти реакцию системы y(t), если известны входное воздействие x(t) и весовая функция w(t).
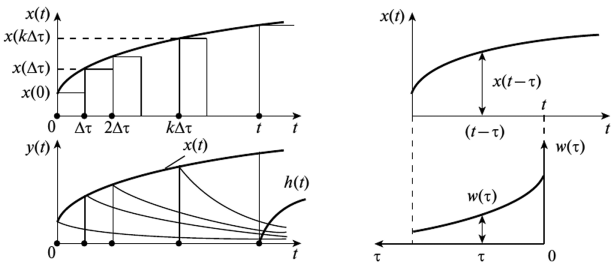
Представим, что входное воздействие представляет собой последовательность прямоугольных импульсов до времени t и ступеньки высотой x(t) в момент времени t. см.рис. 2.11 Для каждого импульса мы можем записать реакцию системы через весовую функциию:

где:
 — значение отклика по завершению предыущего импульса;
— значение отклика по завершению предыущего импульса;
 — время завершения текущего импульса;
— время завершения текущего импульса;
 — значение весовой функции в начале текущего импульса.
— значение весовой функции в начале текущего импульса.
Тогда для определения занчения отклика в произвольный момент времени необходимо сложить все импульсы и ступенчатое воздействие в момент времени t:

Переходя к пределам


если перейти от t к бесконечности мы получим формулу интеграла Дюамеля-Карсона, или по другому «интеграла свертки» который обеспечивает вычисление оригинала функции по произвдению изображения двух функций:

где  — вспомогательное время
— вспомогательное время
Для вывода аналогичной зависмости от переходной функции вспомним что изображение весовой и переходной функции связаны соотношением:  запишем выражение изображения для отклика в операторной форме:
запишем выражение изображения для отклика в операторной форме:

Используя интеграл свертки получаем, что при известной переходной функции (h(t)) и известному входному воздействию х(t) выходное воздействие рассчитывается как:

2.12. Mетод переменных состояния.
До этого мы рассматривали системы с одной передаточной функцией, но жизнь всегда сложнее и как правило в системах есть несколько передаточных функций несколько входных воздейстий и несколько реакций системы. (см. рис. 2.12.1)
В этом случае наиболее удобной формой пердставления систем для их анализа и расчета оказался метод переменных состояния. Для этого метода, вместо передаточных функций связывающих вход с выходом используются дополнительные переменные состояния, которые описывают систему. В этом случае можно говорить, что состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно. см. рис. 2.12.2
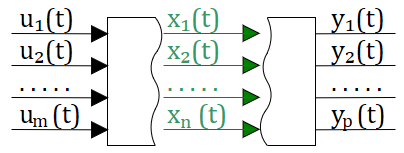
В методе состояний, производные всех переменных состояния, в общем случае зависит от всех переменных и всех входных воздействия, и могут быть записаны в представленной ниже системы обыкновенных дифференциальных уравнений (ОДУ) первой степени. Эта система уравнений называю системой ОДУ в форме Коши:

Выход из системы зависит от переменных состояния и, в общем случае от входных воздействий и описывается следующей системой уравнений:

где:
n — количество перемнных состояния,
m — количество входных воздействий,
p — количество выходных переменных;
Данная система уравнений может быть записана в матричной форме:

где:
 — вектор входа (или вектор управления);
— вектор входа (или вектор управления);
 — вектор столбец производных переменных состояния;
— вектор столбец производных переменных состояния;
 — вектор столбец переменных состояния;
— вектор столбец переменных состояния;
 — вектор выхода;
— вектор выхода;
 — собственная матрица системы [n x n],
— собственная матрица системы [n x n],
 — постоянные коэффициенты;
— постоянные коэффициенты;
 — матрица входа [n x m],
— матрица входа [n x m],
 — постоянные коэффициенты;
— постоянные коэффициенты;
 — матрица выхода а [p x n],
— матрица выхода а [p x n],
 — постоянные коэффициенты;
— постоянные коэффициенты;
 — матрица обхода [p x m],
— матрица обхода [p x m],
 — постоянные коэффициенты;
— постоянные коэффициенты;
В нашем случае почти всегда все элементы матрицы D будут нулевыми: D = 0.
Такое описание системы позволяет с одной стороны стандартным образом описывать различные технические системы. Явная формула для расчета производных позволяет достаточно просто осуществлять численное интегрирование по времени. И это используется в различных программах моделирования
Другое использование данного представления для простых систем, описанных в переменных «вход-выход», зачастую позволяет устранить технические трудности, связанные с решением ОДУ высокой степени.
Еще одним преимуществом данного описания, является то, что уравнения в форме Коши можно получить из законов физики
Пример решения задачи в форме коши.
Рассмотрим задачу моделирования гидравлического привода, при следующих условиях:
Дано:
Цилиндрический плунжер диаметром 10 мм, с приведенной массой 100 кг, работает на пружину жесткостью 200 Н/мм и демпфер с коэффициентом вязкого трения — 1000 Н/(м/с). Полость начальным объемом 20 см 3 соединяется с источником давлния дросселем диаметром диаметр которого 0,2 мм. Коэффициент расхода дросселя 0.62. Плотность рабочей жидкости ρ = 850 кг/м 3 .
Определить:
Перемещение дросселя, если в источнике давление происходит скачек 200 бар. см. рис. 2.12.13
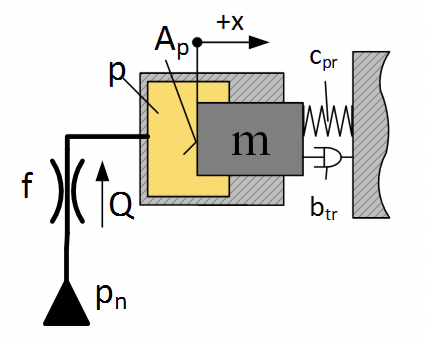
Уравенение движение плунжера:

Где:  – площадь плунжера,
– площадь плунжера,  – жесткость пружины,
– жесткость пружины,  – коэффициент вязкого трения, p – давление в камере.
– коэффициент вязкого трения, p – давление в камере.
Поскольку дифференциальное движения это уравнение второго порядка, превратим его в систему из двух уравнений первого порядка, добавив новую переменную — скорость  , тогда
, тогда 

Уравнение давления в камере, для упрощения принимаем что изменениям объема камеры из-за перемещения плунжера можно пренебречь:

Где: Q – расход в камеру, V — объем камеры.
Расход через дроссель:

Где: f– площадь дросселя,  – давление в источнике, p – давление в камере.
– давление в источнике, p – давление в камере.
Уравнение дросселя не линейное, по условию задачи, давление входное изменяется скачком, от 0 до 200 бар, проведем линеаризацию в окрестности точки давления 100 бар тогда:

Подставляем линеаризованную формул расхода в формулу давления:

Таким образом общая система уравнений в форме Коши, для рис 2.12.3 привода принимает вид:

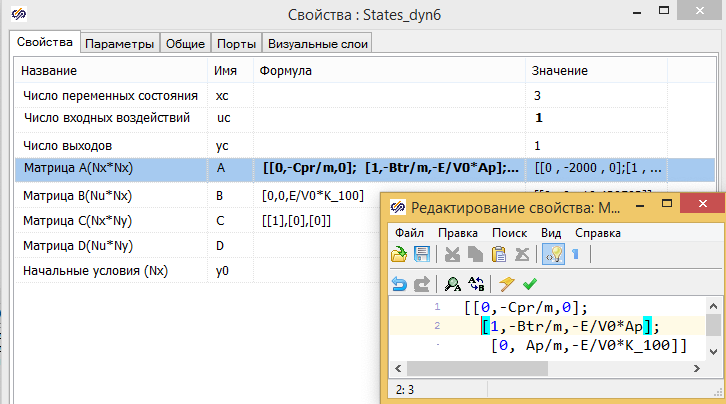
Матрицы A, B, С, В для матричной формы системы уравнений принимают вид:

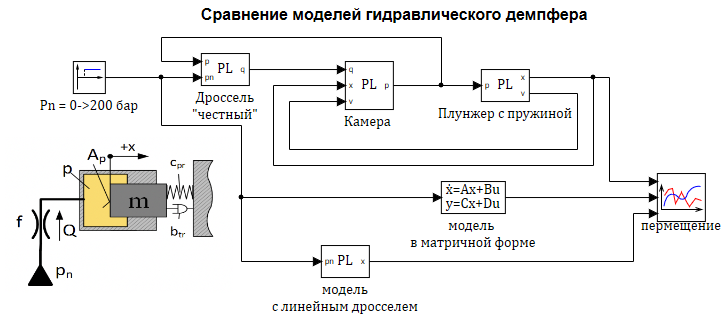
Проверим моделированием в SimInTech составленную модель. На рисунке 2.12.13 представлена расчетная схема содержащая три модели:
1 — «Честная» модель со всеми уравнениями без упрощений.
2 — Модель в блоке «Переменные состояние» (в матричной форме).
3 — Модель в динамическом блоке с линеаризованным дросселем.
Все условия задачи задаются как глобальные константы проекта, в главном скрипте проекта, там же расчитываются на этапе инициализации расчета, площади плунжера и проходного сечения дросселя см. рис. 2.12.5:
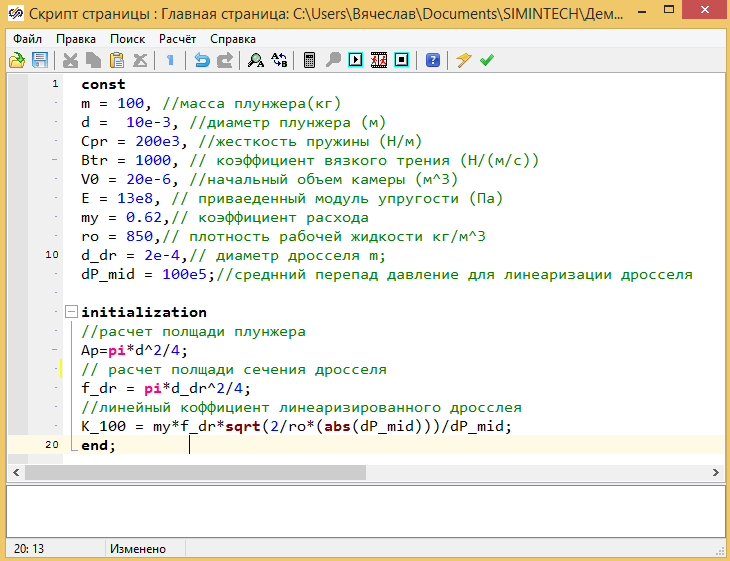
Рисунок 2.12.5 Глобальный скрипт проекта.
Модель на внутреннем языке программирования представлена на рис. 2.12.6. В данной модели используется описание модели в форме Коши. Так же выполняется учет изменения объема дросселя на каждом шаге расчета, за счет перемещения плунжера (Vk = V0+Ap*x.)
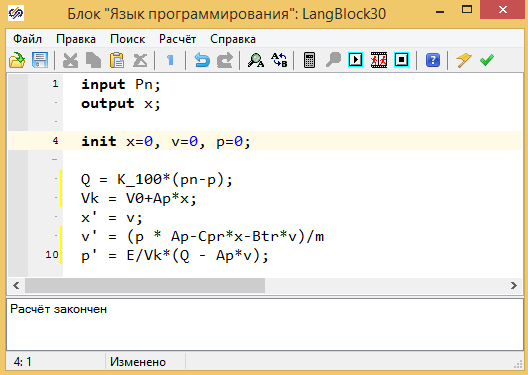
Рисунок 2.12.6 Скрипт расчета модели в форме Коши.
Модель в матричном форме задается с использованием глобальных констант в виде формул. (Матрица в SimInTech задается в виде последовательности из ее столбцов) см. рис. 2.12.7
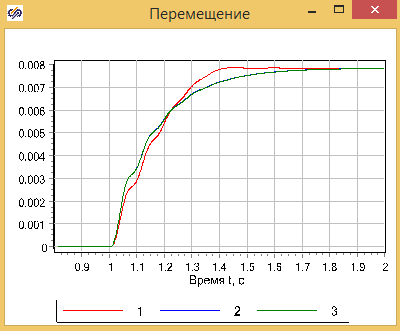
Результаты расчета показывают, что модель в матричной форме и модель на скриптовом языке в форме Коши, практически полностью совпадают, это означает, что учет изменения объема полости практически не влияют на результаты. Кривые 2 и З совпадают.
Процедура линеаризация расхода через дроссель вызывает заметное отличие в результатах. 1-й график c «честной» моделью дросселя, отличается от графиков 2 и 3. (см. рис. 2.12.8)
Сравним полученные модели, с моделью созданной из библиотечных блоков SimInTech, в которых учитываются так же изменение свойств реальной рабочей жидкости — масла АМГ-10. Сама модель представлена на рис. 2.12.9, набор графиков на рисунке 2.12.10
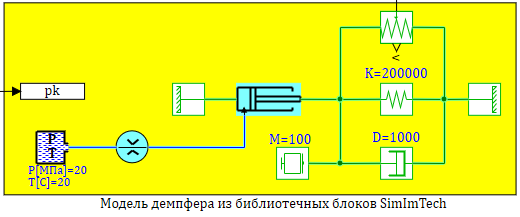
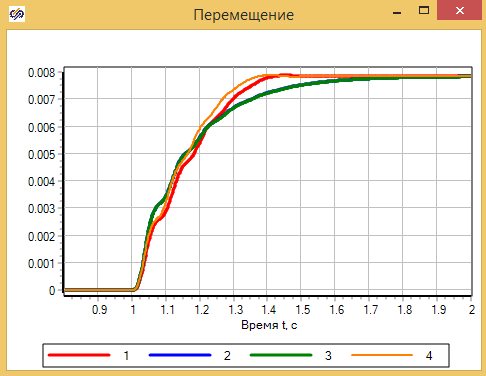
На графиках видно, что уточненная модель отличается от предыдущих, однако погрешность модели составлят наших упрощенных моделей составляют примерно 10%, в лишь в некоторые моменты времени.
2.13. Переход от описания переменных «вход-выход» к переменным состояния и обратно
Рассмотрим несколько вариантов перехода от описания «вход-выход», к переменным состояния:

Вариант прехода зависит от правой части уравнения с переменными «вход-выход»:

2.13.1. Правая часть содержит только b0*u(t)
В этом варианте, в уравнениях в правой части отсутствуют члены с производными входной величины u(t). Пример с плунжером выше так же относится к этому варианту.
Что бы продемонстрировать технологию перехода рассмотрим следующее уровнение:

Для перехода к форме Коши ведем новые переменные:

И перепишем уравнение относительно y»'(t):

Используя эти переменные можно перейти от дифференциального уравнения 3-го прядка, к системе из 3-х уравнений первого порядка в форме Коши:

Соотвественно матрицы для матричного вида уравнений в переменных сосотяния:

2.13.2. Правая часть общего вида
Более сложный случай, когда в уравнениях есть производные от входных воздействий и уравнение в общем случае выглядит так:
Сделаем преобразования: перейдем к уравнениям динамики в изображениях:

Тогда можно представить уравнение в изображениях в виде:


Разделим уравнение в изображениях на произведение полиномов  , получим:
, получим:

Где:  — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины
— некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины  . Тогда входная величина может быть в изображениях представлена как:
. Тогда входная величина может быть в изображениях представлена как:

Вренемся к оригиналу от изображений получим:  ,
,
где:  — дифференциальный оператор.
— дифференциальный оператор.

А это дифференциальное уравнение n-го порядка мы можем преобразовать к системе из n дифференциальных уравнений первого порядка, как это мы делали выше:

Таким образом, мы получили систему уравнение в форе Коши, относительно переменных состояния  :
:

А регулируемую величину (выход системы) мы так же можем выразить через эти переменные, в изображениях:

Перейдем от изображения к оригиналам:

Если обозначить вектор  , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
, то мы получим уравнения переменных состояниях в матричной форме, где D = 0:

Пример:
Рисунок 2.13.1 Передаточная функция.
Имеется передаточная функция (рис. 2.13.1) в изображениях :

Необходимо преобразовать передаточную функцию к системе уравнений в форме Коши
В изображения реакция системы связана с входным воздействие соотношением:

Разделим в последнем правую и левую часть на произведения  , и введем новую перменную
, и введем новую перменную  :
:

Полиномы N(s) и L(s) равны:

Перейдем в последнем выражении от изображения к оригиналам и ведем новые переменные (состояния):

Переходим от уравнения третьего порядка к системе трех уравнений первого порядка:

Или в матричной форме:

Для получения второго матричного уравнения воспользуемся соотношением для новых переменных в отображениях:

Перейдем от изображений к оригиналу:

Таким образом второе уравнение матричной системы выглядит так:

Проверим в SimInTech сравнив передаточную функцию и блок переменных состояния, и убедимся, что графики совпадают см. рис. 2.13.2
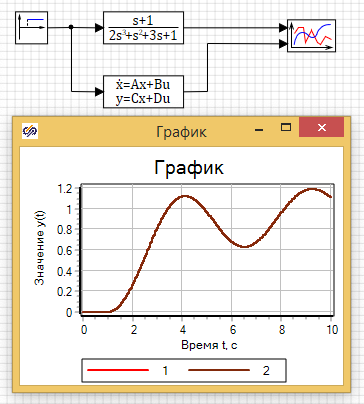
Рисунок 2.13.2 Сравнение переходного процеса у блока передаточной функции и блока переменных состояния.
http://habr.com/ru/post/520770/