Колебания системы с одной степенью свободы


Колебания системы с одной степенью свободы
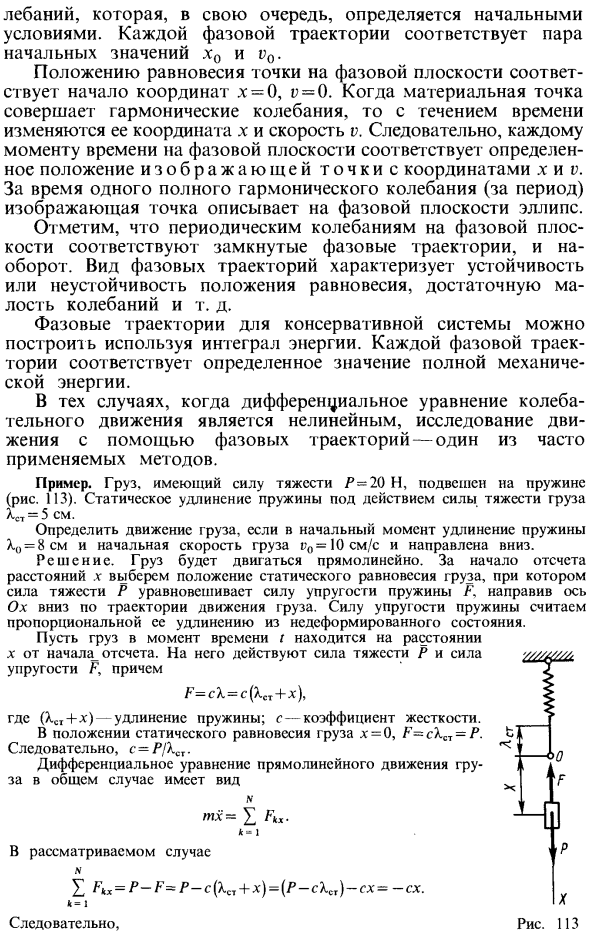
- Механическая система с одной степенью свободы имеет одну обобщенную координату q, и ее движение описывается одним уравнением Лагранжа ди дк дк (1). Обобщенная сила Q может рассматриваться как состоящая из трех частей: Q = Qn + Q ‘+ QB, где Qn — обобщенная сила потенциальных сил. Потенциальная энергия в общем случае зависит от координат точки системы, поэтому она зависит от обобщенной координаты q и обобщается по формуле Qn = —dP / dq Оно не зависит от скорости q.
В случае нестационарного силового поля и нестационарного силового поля потенциальная энергия явно зависит от времени. 0F включает в себя обобщенную часть силы, которая является результатом действия сопротивления. Сила сопротивления зависит как от числового значения, так и от направления скорости системной точки. Далее рассматривается случай линейного сопротивления, когда сопротивление системных точек пропорционально скорости этих точек и направлено в противоположном направлении. Часть обобщенной силы QB является производной от так называемых вынужденных или возмущающих сил, которые в основном зависят от времени.
Поступательная часть перемещения тела зависит от выбора точки, вместе с которой перемещается тело, а вращательная часть перемещения вокруг оси или вокруг точки не зависит от выбора точки. Людмила Фирмаль
Далее рассмотрим случай гармонических возмущений, где Q изменяется во времени в соответствии с законом синуса. В общем случае зависимость QB от времени может быть расширена с помощью ряда Фурье для учета дифференциальных уравнений движения для каждого синусоидального члена. Естественная линейная вибрация системы Под действием нескольких потенциальных сил, то есть b = -dlJ / dq, рассмотрим небольшую вибрацию системы с одной степенью свободы. Сопротивление и возмущение Там нет власти. Такая вибрация называется внутренней или свободной.
Когда система движется, обобщенные координаты, скорость и ускорение достаточно малы, чтобы игнорировать все члены q, q и q, которые являются квадратичными или более высокими в терминах уравнения Лагранжа (1), то есть, члены, которые включают эти квадраты Если система имеет малую вибрацию, то для обобщенной координаты q получается линейное дифференциальное уравнение. Колебания, в которых дифференциальное уравнение является линейным, называются линейными. Небольшие колебания линейны. Однако линейность не обязательно является небольшой вибрацией.
В общем, ограничения, которые должны быть наложены на величину, характеризующую движение, чтобы вибрация была уменьшена, могут быть установлены только после того, как проблема будет полностью решена в предположении, что вибрация мала. Далее рассматриваются только небольшие колебания или, если не маленькие, линейные колебания. Дифференциальное уравнение для естественной линейной вибрации системы. Чтобы вывести линейное уравнение малых собственных колебаний из уравнения Лагранжа (1), кинетическая и потенциальная энергии должны быть последовательно растянуты вблизи положения равновесия системы с q = 0.
Рассмотрим систему, в которой голономная, идеальная, неосвобожденная и фиксированная связь состоит из N точек и движется около положения равновесия. Ее кинетическая энергия При сделанных предположениях о совместной стационарности радиус-вектор r * каждой точки в системе зависит от времени только через обобщенную координату q. Следовательно, rk = — ^ q. Подстановка этого gk в уравнение кинетической энергии дает r = 72l ^ 2. Как и в случае с gk, величина A может зависеть только от q, а не от q. Когда A (q) расширяется вблизи q = 0 степенного ряда, Далее индекс 0 означает, что соответствующее значение вычисляется с q = 0.
Чтобы получить кинетическую энергию в терминах квадратичного и более низкого членов для q и q, достаточно получить только постоянное значение Ao из разложения A (. Где q0 и q0 — начальные значения обобщенных координат и обобщенной скорости. Используйте выражения q и q с r = 0, чтобы получить Ci = Людмила Фирмаль
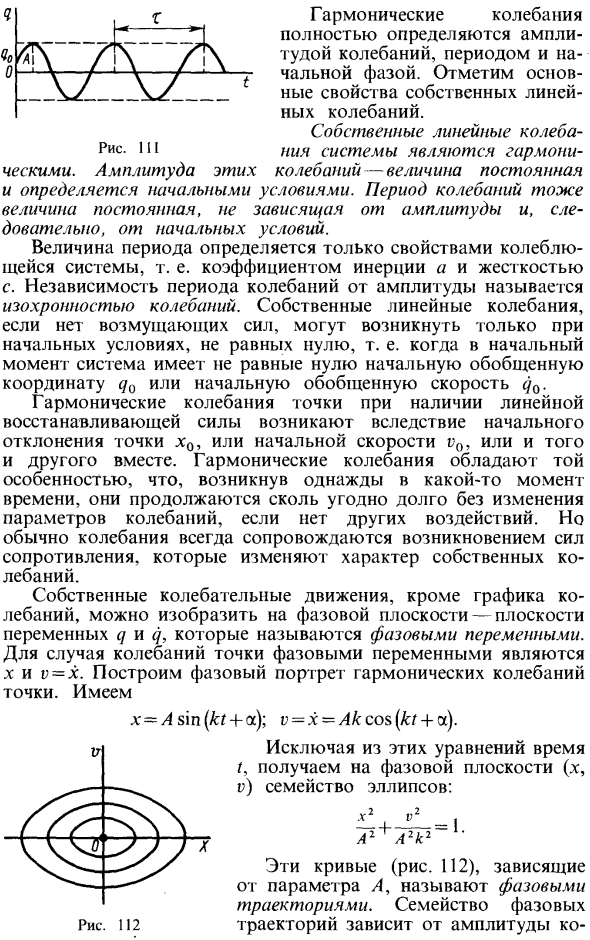
Обратите внимание на основные характеристики естественной линейной вибрации. Рисунок 111 Амплитуда этих собственных линейных колебаний системы является гармонической величиной постоянной вибрации И определяется начальными условиями. Период колебаний также является постоянным значением и не зависит от амплитуды и, следовательно, начальных условий. Величина периода является характеристикой системы вибрации, т.е. Он определяется только коэффициентом инерции а и жесткостью с. Независимость периода вибрации от амплитуды называется виброизохронизмом. Уникальная линейная вибрация.
При отсутствии возмущающих сил они могут возникать только при начальных условиях, которые не равны нулю. То есть в первый момент система имеет ненулевую начальную обобщенную координату q0 или начальную обобщенную скорость q0. Гармоническое колебание точки при наличии линейной восстанавливающей силы вызвано начальным отклонением точки x0, начальной скоростью a0 или обоими. Гармоническая вибрация имеет характеристику, заключающуюся в том, что, как только она возникает в определенной точке, она продолжается до тех пор, пока не произойдет изменение параметров вибрации, если не будет другого влияния.
Однако обычно вибрация всегда сопровождает сопротивление, и природа естественной вибрации меняется. В дополнение к графику колебаний его колебательное движение может быть представлено на фазовой плоскости — плоскости переменных q и q, называемых фазовыми переменными. Для точечных колебаний фазовыми переменными являются x и v = x. Давайте создадим фазовый портрет гармонической вибрации точки. У нас есть x — грех (£ f + a); v = x = Akcos (kt + v). Рисунок 112 Удалите время t из этих уравнений, чтобы получить эллиптическое семейство в фазовой плоскости (x, p). Эти кривые (рис. 112), в зависимости от параметра A, называются фазовыми траекториями.
Семейство фазовых траекторий зависит от следующих амплитуд: Вариация определяется начальными условиями. Каждая фазовая траектория соответствует паре начальных значений x0 и v0. Точка равновесия на фазовой плоскости соответствует началу координат x = 0, a = 0. Когда точка массы гармонично колеблется, ее координата x и скорость v изменяются со временем. В результате каждый момент на фазовой плоскости соответствует определенной позиции точки изображения с координатами x и V. В течение одного полного гармонического колебания (периода) точка изображения представляет эллипс на фазовой плоскости. Отметим, что замкнутые фазовые траектории соответствуют периодическим колебаниям на фазовой плоскости и наоборот.
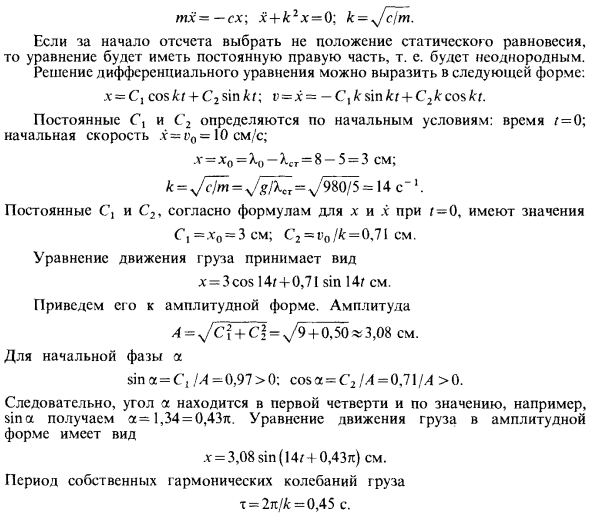
Тип фазовой траектории характеризует устойчивость или неустойчивость положения равновесия и малость вибрации. Консервативные системные фазовые траектории могут быть построены с использованием интеграции энергии. Каждая фазовая траектория соответствует определенному значению полной механической энергии. Если дифференциальное уравнение для колебательного движения является нелинейным, изучение движения с использованием фазовых траекторий является одним из наиболее часто используемых методов. mx = —cx \ x + fc2x = 0; k = ^ / s! т. Если вы не выберете место статического равновесия в контрольной точке, уравнение будет иметь постоянную правую часть. Другими словами, это становится неравномерным.
Решение дифференциального уравнения может быть выражено в следующем виде: x = C1cos * / + C2sin * (; ”= x = −C, * -sinfc (+ C2 * cosb. Константы C и C2 определяются начальными условиями. Время 1 = 0, начальная скорость x = b0 = 10 см / с; х = х0 = х0-х „= 8-5 = 3 см; k = y / eim = y / glkcl = y / 99OI5 = 14 с «’ Константа С ‘! И с2. Если выражение для x и x равно 1 = 0, значение равно C | = xo = 3cm. C2 = »o / * = 0,71 см Уравнение движения груза принимает вид x = 3cos 141 + 0,71 sin 141 см Используйте формат амплитуды. амплитудное 4 = х / с? + C? =, / 9 + 0,50 х 3,08 см.
Начальная фаза а. sin a = C, l = 0,97> 0; cos a = C2 / A = 0,71 / A> 0. Следовательно, угол a находится в первой четверти и, в зависимости от значения (например, sina), a = 1,34 = 0,43 л. Уравнение движения для нагрузки в амплитудной форме имеет вид ,


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Уравнение Лагранжа. Свободные колебания системы с одной степенью свободы (начальные условия, уравнения, определения). Свободные колебания системы при сопротивлении
Для исследования колебательных систем с конечным числом степеней свободы используются уравнения Лагранжа в обобщенных координатах, составленные в предположении о том, что связи, наложенные на систему, идеальны; уравнения не содержат реакций связей; входящие в уравнения величины, определяющие движения системы, непосредственно связаны обобщенными силами.
Для консервативных систем уравнение Лагранжа записывается через потенциальную энергию:
В этом случае энергия характеризует полную механическую энергию системы.
Колебания системы с одной степенью свободы.
Система с одной СС – система, положение которой в пространстве однозначно определяется заданием одной обобщенной координаты. Например математический маятник движется по закону  , где
, где  начальная фаза,
начальная фаза,  фаза колебаний,
фаза колебаний,  амплитуда.
амплитуда.
Уравнения малых свободных колебаний системы с одной СС.
Колебания называются свободными, если скорость изменения состояния системы определяется только состоянием самой системы. Такая система – линейный осциллятор.
Система консервативна, уравнение Лагранжа:

Сопротивление среды равно нулю, поэтому 
Потенциальная энергия оценивается через жесткость  системы:
системы:  /
/
Общее решение:  .
.
Подстановка для решения:  ,
,  ,
, 
Начальные условия для решения: 




Свободные колебания при наличии сопротивления.
В этом случае на систему действует сила  :
:

Введем отношение 
 , тогда
, тогда

Колебания системы с конечным числом степеней свободы, приведенная система. Кинетическая и потенциальная энергия малых свободных колебаний. Уравнение малых колебаний системы около положения устойчивого равновесия.
Детали или механизмы системы на практике являются сложной упругой системой с бесконечным числом степеней свободы. Для определения положения точек при колебаниях в любой момент времени необходимо найти функцию времени и координат точек. При расчетах упругая система заменяется более простой системой с конечным числом степеней свободы – приведенная система.
Кинематическая энергия системы с  степеней свободы:
степеней свободы:
Если выполняется переход к обобщенным координатам:
инерционные коэффициенты.
Для колебаний возле положения устойчивого равновесия разложение коэффициентов  в ряд по степеням
в ряд по степеням  ограничивается рассмотрением постоянного коэффициента
ограничивается рассмотрением постоянного коэффициента  , остальные же не рассматриваются ввиду их малости.
, остальные же не рассматриваются ввиду их малости.

Потенциальная энергия системы может быть выражена через упругие коэффициенты:
Уравнения малых колебаний системы около положения устойчивого равновесия.
Подставляя в уравнение Лагранжа выражения для кинетической и потенциальной энергий b принимая, что: , можно получить систему дифференциальных уравнений, описывающих колебания системы:

Общее решение данной системы уравнений определяет колебания механической системы.
Теоретическая механика. Малые колебания с одной степенью свободы.
В качестве примера разберем решение типового варианта домашнего задания по данной теме. Возьмем вариант 32, чтобы никому не было обидно, ну а кое-кому, возможно, сказочно повезло.
Итак, вот условие задания.
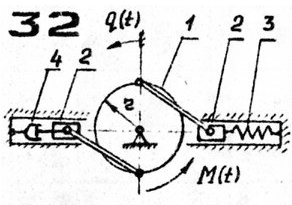
К нему прилагается таблица с цифрами, мы будем решать в общем виде. Обычно в подобных заданиях всегда заданы все массы, упругость пружины, размеры звеньев, коэффициент сопротивления демпфера и граничные условия для решения дифференциального уравнения колебаний.
Все подобные задачи решаются по одному и тому же алгоритму. Первым делом задаемся обобщенной координатой. За нас это уже сделали составители задания, обобщенная координата указана на рисунке как q(t) — это угловой поворот шестерни 1.
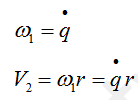
Следующий шаг — записать через q скорости ключевых точек механизма. К ним относятся — скорости центров тяжести всех тел, обладающих массой, угловые скорости тел, совершающих вращательное движение, скорость точки закрепления пружины, скорость поршня демпфера. В нашем случае это угловая скорость шестерни 1 и линейные скорости ползунов 2.
Уравнения, связывающие скорости с обобщенной координатой, называются уравнениями связей. Для нашей системы они выглядят несложно.
Третий шаг — нужно записать кинетическую энергию для всей системы. Для этого нужно посчитать кинетическую энергию всех тел, обладающих массой. В нашем случае шестерня 1 движется вращательно, ползуны 2 — поступательно. Кинетическая энергия считается следующим образом:
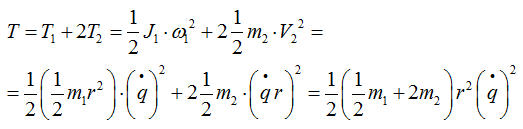
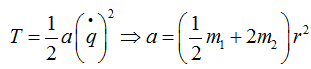
Из выражения для кинетической энергии мы определим обобщенный коэффициент инерции а. Поскольку
Теперь время записать выражения для потенциальной энергии системы. Центры тяжести тел в нашем механизме не перемещаются по вертикали, значит, силы тяжести вклад в потенциальную энергию не вносят. Была ли пружина деформирована до начала колебаний? Не была. Значит, при повороте шестерни 1 на угол q пружина растягивается на величину qr (это следует из уравнения связи для V2, перемещения связаны теми же соотношениями, что и скорости).
Из выражения для потенциальной энергии мы определим обобщенный коэффициент жесткости с. Поскольку
Теперь работаем с диссипативной функцией Релея. Она записывается следующим образом

Здесь V2 — это скорость поршня в демпфере, в нашем случае она равна скорости ползуна 2.
Из выражения для Ф мы определим обобщенный коэффициент вязкого сопротивления b. Поскольку
Осталось разобраться с возбуждающей колебания силой. В нашем случае происходит динамическое возбуждение колебаний (когда к механизму приложена внешняя сила F(t), ну или момент М(t), как у нас). Нужно записать обобщенную силу, это проще всего сделать через элементарную работу внешней силы на малом приращении координаты. Выглядит так
Отсюда можно выразить амплитуду возбуждения. Поскольку

Собственно, мы вплотную подошли к записи дифференциального уравнения колебаний. Для этого нам нужны значения обобщенных коэффициентов:
Четыре цифры. В подавляющем большинстве задач всегда не равны 0 коэффициенты a и с. Если в задаче нет демпфера, то b=0. Если нет возбуждения, то H=0.
В общем виде, дифференциальное уравнение колебаний записывается так
Его приводят к каноническому виду
Когда диффур записан, остается его только решить. Алгоритм решения мы рассматривали ранее.
Надеемся, что мы немного прояснили для вас алгоритм решения подобных задач. Подытожим.
1) Выбрать обобщенную координату
2) Записать уравнения связей
3) Записать кинетическую энергию (найти обобщенный коэффициент инерции а)
4) Записать потенциальную энергию (найти обобщенный коэффициент жесткости c)
5) Записать диссипативную функцию Релея (найти обобщенный коэффициент сопротивления b)
6) Записать обобщенную возбуждающую силу (найти амплитуду H)
7) Записать ДУ, привести его к каноническому виду, решить.
Разумеется, есть ряд фишек и тонкостей в каждом отдельно взятом механизме, но общий ход размышлений именно такой. Дерзайте, и у вас все получится. Если возникают вопросы, обращайтесь.
http://mydocx.ru/4-88721.html
http://botva-project.ru/botva/obrazovanie/teoreticheskaya-mehanika-malye-kolebaniya-1/