Электропривод по системе генератор — двигатель (Г—Д)
Всистеме Г—Д, схема которой представлена на рис. 7.1, используется электромашинный преобразователь переменного тока в постоянный, состоящий из асинхронного или синхронного двигателя ДП и генератора Г, напряжение которого можно изменять в широких пределах. Обмотки возбуждения генератора ОВГ и двигателя ОВД получают питание от независимого источника постоянного тока возбудителя В (или от управляемого тиристорного преобразователя).
В системе Г—Д любой режим работы двигателя Д (пуск, торможение, регулирование скорости, реверсирование) можно получить изменением величины и полярности подводимого кего якорю напряжения.
 |
Уравнение механической характеристики системы Г—Д
имеет вид:
 |
где Rя — сопротивление цепи якоря, состоящей из сопротивлений якоря двигателя Rя.д, якоря генератора Rя.ги соединительных проводов rпр (Rя=Rя.д+Rя.г+rпр); Ег — э. д. с. генератора. Каждому значению Ег соответствует своя скорость идеального холостого хода
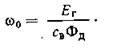
Следовательно, изменяя э. д. с, можно регулировать скорость вращения двигателя Д. При этом механические характеристики системы Г—Д представляют собой семейство параллельных прямых, жесткость которых остается неизменной. На рис. 7.2 представлены механические характеристики системы Г—Д при различных значениях э. д. с. генератора.
Реверсирование двигателя Д осуществляется изменением .направления тока в обмотке возбуждения генератора. При этом меняется знак э. д. с. ЕТ и, следовательно, направление вращения двигателя.
Диапазон регулирования скорости вращения двигателя для системы Г—Д, при регулировании током возбуждения генератора, равен 7—15. Расширение диапазона регулирования до 14—30 можно осуществить ослаблением магнитного потока двигателя. Применение замкнутых систем управления позволяет расширить диапазон регулирования до 200 : 1.
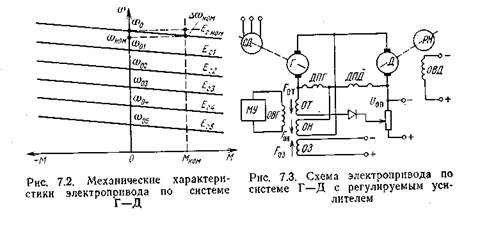
На рис. 7.3 приведена схема системы Г—Д с регулируемым усилителем в качестве возбудителя. Усилитель имеет несколько обмоток управления, что позволяет осуществлять обратные связи по напряжению, току, угловой скорости и т. д., тем самым создать замкнутую систему управления.
Следует отметить, что в качестве возбудителя может при
меняться силовой магнитный усилитель (СМУ) или тиристорный преобразователь (принцип действия системы не изменится).
Обмотка ОЗ является задающей и служит для регулирования величины и полярности э. д. с. генератора, а следовательно, величины и направления угловой скорости двигателя.
Обмотка ОН включена параллельно обмотке якоря генератора и осуществляет отрицательную обратную связь по напряжению генератора, т. е. намагничивающая сила (н. с.) обмотки ОН направлена встречно н. с. обмотки ОЗ.
Обмотка ОТ включена на падение напряжения в обмотках дополнительных полюсов генератора ДПГ и двигателя ДПД, которое пропорционально току главной цепи. Ток в обмотке ОТ будет протекать только в случае, если I(Rдпг + Rдпд) будет больше опорного напряжения Uon.
Рассмотрим действие обратных связей системы.
Обратная отрицательная связь по напряжению служит для компенсации снижения напряжения на зажимах двигателя при увеличении нагрузки, т. е. тока в цепи якоря и, следовательно, увеличения жесткости механической характеристики привода. При работе двигателя вхолостую угловая скорость двигателя определяется э. д. с. генератора, а последняя — э. д. с. усилителя, созданной регулирующей и. с.
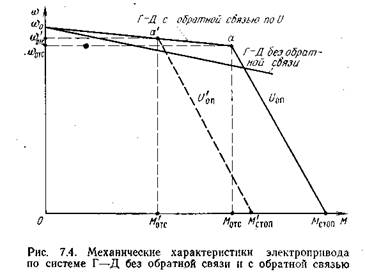
При увеличении тока нагрузки появляется падение напряжения в цепи якоря, что вызывает уменьшение напряжения на зажимах двигателя. Это должно привести к снижению угловой скорости двигателя, но снижение напряжения вызовет уменьшение н.с. обмотки ОН, следовательно, возрастет результирующая н. с. .Fрез и э. д. с. генератора. Этим будет компенсировано снижение скорости двигателя. Механические характеристики без обратной связи и с обратной связью показаны на
Обратная отрицательная связь по току применяется для создания экскаваторной механической характеристики системы. При увеличении нагрузки увеличивается падение напряжения I(Rппг+Rяпд. Если это падение напряжения превысит опорное напряжение Uon, то в обмотке ОТ (см. рис. 7.3) будет протекать ток, создающий н. с, направленную встречно н. с. обмотки ОЗ. Результирующая н. с, Fрез = F03—F0H—Fот начнет уменьшаться, будет уменьшаться э. д. с. генератора и, следовательно, угловая скорость двигателя.
Ток, при котором начинается действие обратной связи по току, называется током отсечки Iотс. На рис. 7.4 механическая характеристика при токе I Iотс — отрезком а—Мстоп. Ток отсечки и стопорный момент можно изменять, изменяя величину опорного напряжения Uon. При Uоп‘ 2 ф/f1 2 . Поэтому для сохранения постоянства перегрузочной способности двигателя необходимо с изменением частоты изменять и подводимое к двигателю напряжение по закону Uф / f1 = const.
На рис. 7.8 приведена структурная схема электропривода по системе УПЧ—Д, которая представляет собой сочетание управляемого преобразователя УТП и автономного инвертора АИ. Механические характеристики привода по системе УПЧ-Д с асинхронным двигателем аналогичны механическим характеристикам привода по системе Г—Д.
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам
26.07.2013
Система генератор — двигатель
Для широкого и плавного регулирования частоты вращения электродвигателя постоянного тока применяется система генератор — двигатель (Г — Д). Основной принцип этой системы заключается в изменении приложенного к якорю двигателя напряжения при неизменном напряжении цепи возбуждения.
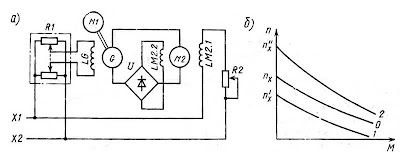
Система Г—Д (рис. 1) состоит из двигателя постоянного тока с независимым возбуждением М2, непосредственно связанного с рабочим механизмом (исполнительный двигатель). Он питается электрической энергией от генератора G, приводимого во вращение двигателем M1. Обмотки возбуждения генератора LG и двигателя LM2 получают питание от независимого источника постоянного тока с неизменным напряжением.
Первичный двигатель M1, вращающий якорь генератора G, представляет собой механический или электрический двигатель, причем приводимый им генератор не требует ни реверсирования, ни регулирования частоты вращения.
Основным требованием, предъявляемым к первичному двигателю, является жесткость его механической характеристики, поэтому механические двигатели снабжают всережимными регуляторами частоты вращения, а электрические выбирают с жесткой характеристикой. Итак, первичный двигатель вращается с n = const и не реверсируется
Исполнительный двигатель управляется изменением значения и направления тока в обмотках возбуждения LG и LM2.
Механическая характеристика исполнительного двигателя в си-стеме Г—Д подобна механическим характеристикам двигателя с независимым возбуждением.
Естественная механическая характеристика 0 (см. рис. 2.3) возможна при номинальной частоте вращения генератора и отсутствии добавочных резисторов в цепях возбуждения генератора и исполнительного двигателя.

Ее наклон несколько больше, чем характеристики двигателя, работающего от сети, так как к сопротивлению якоря двигателя добавляется сопротивление якоря генератора.
При увеличении сопротивления реостата R1 уменьшаются ток возбуждения генератора и его э.д.с. Частота вращения двигателя М2 при этом уменьшится (характеристика 3).
Увеличение сопротивления реостата R2 вызывает уменьшение магнитного потока двигателя М2, частота вращения его увеличится (характеристика 2).
Двигатель реверсируется изменением направления тока в обмотке возбуждения генератора, при этом меняется направление его э. д. с. и тока в цепи якоря двигателя (магнитный поток двигателя остается неизменным).
Механические характеристики системы Г—Д жесткие. Для предотвращения поломок механизма необходимо ограничивать максимальный момент двигателя М2, что достигается смягчением характеристик.
Существуют следующие способы смягчения механических характеристик исполнительного двигателя: применение исполнительного электродвигателя со смешанным возбуждением; применение генератора со смешанным возбуждением и встречно включенной последовательной обмоткой.
Использование последовательной обмотки у исполнительного двигателя (рис. 2, а) позволяет получить более мягкие характеристики (рис. 2, б) по сравнению с характеристиками двигателя только с независимым возбуждением. Однако этот способ имеет недостаток, заключающийся в том, что при реверсировании двигателя изменяется направление тока в обмотке LM2.2 и она начинает противодействовать обмотке LM2.1, размагничивая двигатель. Во избежание этого последовательную обмотку включают не непосредственно в цепь якоря, а через мостовой полупроводниковый выпрямитель U, обеспечивающий постоянное направление тока в ней.
Применение размагничивающей обмотки генератора лишено указанного недостатка, поэтому используется наиболее часто.
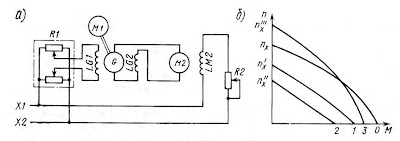
Принцип смягчающего действия размагничивающей обмотки LG2 (рис. 3, а) заключается в следующем: с увеличением нагрузки исполнительного двигателя ток якоря увеличивается, размагничивающее действие обмотки возрастает, э.д.с. генератора и частота вращения двигателя уменьшаются.
Механические характеристики показаны на рис. 3, б. Искривленная форма характеристик 0,1,3 объясняется насыщением генератора. При насыщенном генераторе размагничивающее влияние обмотки меньше, чем при ненасыщенном, в начале участка характеристики более жесткие, а затем при больших нагрузках насыщение исчезает и характеристики становятся круче. Если же ток независимой обмотки возбуждения генератора невелик и насыщение отсутствует, характеристика становится прямой (характеристика 2).
При изменении направления тока в независимой обмотке возбуждения генератора меняется направление тока в якоре и последовательной обмотке возбуждения; таким образом, размагничивающее действие последовательной обмотки сохраняется.
Торможение исполнительного двигателя в системе Г — Д выполняют всеми методами, рассмотренными в статье «Регулирование частоты вращения, пуск, реверсирование и торможение электродвигателей постоянного тока».
Преимущества системы Г — Д:
- возможность плавного регулирования частоты вращения в широком диапазоне до 16:1;
- быстрый разгон исполнительного двигателя без помощи пускового реостата, т. е. с минимальными потерями энергии;
- легкий пуск первичного двигателя, вращающего невозбужденный генератор;
- быстрое и четкое торможение исполнительного электродвигателя.
Недостатки системы Г — Д:
- низкий к.п.д. всей системы, вызванный многократным преобразованием энергии;
- большие массы, стоимость и габаритные размеры, инерционность.
Следует отметить, что снижение к. п. д. в значительной мере компенсируется возможностью экономичного управления исполнительным электродвигателем при его пуске и регулировании частоты вращения. Эта экономия энергии особенно заметна в электроприводах, требующих частых пусков и реверсов двигателя.
Вместо системы Г — Д целесообразно использовать систему управляемый выпрямитель — двигатель постоянного тока (УВ—Д), силовая цепь которой приведена на рис. 4.
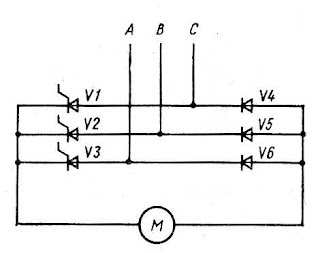
К якорю двигателя М приложено выпрямленное напряжение, регулируемое с помощью полупроводникового выпрямителя VI — V6, собранного по мостовой схеме. Силовая цепь выпрямителя состоит из трех тиристоров VI — V3 и трех неуправляемых диодов V4 — V6. Управление осуществляют изменением фазы открытия тиристоров.
Система УВ — Д имеет по сравнению с системой Г—Д следующие преимущества: отсутствует вращающийся преобразователь; высокий к.п.д. (к.п.д. выпрямителя 0,96 — 0,99); малая инерционность.
Система генератор — двигатель постоянного тока
 В различных станках часто требуется бесступенчатое регулирование частоты вращения привода в пределах более широких, чем те, которые может обеспечить регулирование посредством изменения магнитного потока двигателя постоянного тока с параллельным возбуждением. В этих случаях применяют более сложные системы электропривода.
В различных станках часто требуется бесступенчатое регулирование частоты вращения привода в пределах более широких, чем те, которые может обеспечить регулирование посредством изменения магнитного потока двигателя постоянного тока с параллельным возбуждением. В этих случаях применяют более сложные системы электропривода.
На рис. 1 представлена схема регулируемого электропривода по системе генератор — двигатель (сокращенно Г — Д). В этой системе асинхронный двигатель АД непрерывно вращает генератор Г постоянного тока с независимым возбуждением и возбудитель В, представляющий собой маломощный генератор постоянного тока с параллельным возбуждением.
Двигатель постоянного тока Д приводит в движение рабочий орган станка. Обмотки возбуждения ОВГ генератора и ОВД двигателя питаются от возбудителя В. Изменяя реостатом 1 сопротивление цепи возбуждения генератора Г, меняют напряжение, подводимое к якорю двигателя Д, и тем самым регулируют частоту вращения двигателя. Двигатель при этом работает с полным и неизменным потоком, так как реостат 2 выведен.
При изменении напряжения U меняется частота вращения n 0 идеального холостого хода двигателя Д. Так как поток двигателя и сопротивление цепи его якоря не меняются, то угловой коэффициент b остается постоянным. Поэтому прямолинейные механические характеристики, соответствующие разным значениям U, расположены одна под другой и параллельны друг другу (рис. 2).
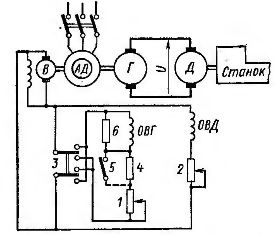
Рис. 1. Система генератор — двигатель постоянного тока (дпт)
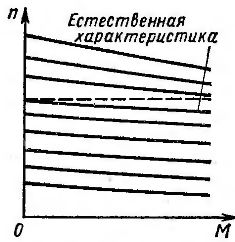
Рис. 2. Механические характеристики системы генератор — двигатель постоянного тока
Они имеют больший наклон, чем характеристики такого же электродвигателя, питаемого от сети постоянного тока, так как в системе Г — Д напряжение U при неизменном токе возбуждения генератора с увеличением нагрузки снижается согласно зависимости:
где Ег и r г— соответственно э. д. с. и внутреннее сопротивление генератора.
По аналогии с асинхронными двигателями обозначим
Эта величина характеризует уменьшение частоты вращения двигателя при повышении нагрузки от нуля до номинальной. Для параллельных механических характеристик
Эта величина возрастает по мере уменьшения n0. При больших значениях sн заданные режимы резания будут значительно изменяться при случайных колебаниях нагрузки. Поэтому диапазон регулирования напряжением обычно не превышает 5:1.
С уменьшением номинальной мощности двигателей падение напряжения в них увеличивается, и механические характеристики получают больший наклон. По этой причине снижают диапазон регулирования напряжением системы Г — Д по мере уменьшения мощности (при мощностях менее 1 кВт до 3:1 или 2:1).
С уменьшением магнитного потока генератора на его напряжении в большей степени сказывается размагничивающее действие реакции его якоря. Поэтому характеристики, относящиеся к низким частотам вращения двигателя, фактически имеют больший наклон, чем механические характеристики.
Расширение диапазона регулирования достигается уменьшением магнитного потока двигателя Д посредством реостата 2 (см. рис. 1), производимым при полном потоке генератора Этому способу регулирования скорости соответствуют характеристики, расположенные выше естественной (см. рис. 2).
Общий диапазон регулирования, равный произведению диапазонов регулирования обоими способами, достигает (10 — 15) : 1. Регулирование изменением напряжения является регулированием с постоянным моментом (поскольку магнитный поток двигателя остается неизменным). Регулирование изменением магнитного потока двигателя Д является регулированием с постоянной мощностью.
Перед пуском двигателя Д реостат 2 (см. рис. 1) полностью выводят, и поток двигателя достигает наибольшего значения. Затем реостатом 1 увеличивают возбуждение генератора Г. Это вызывает повышение напряжения, и скорость двигателя Д увеличивается. Если обмотку ОВГ включить сразу на полное напряжение UB возбудителя В, то ток в ней, как во всякой цепи, обладающей индуктивностью и активным сопротивлением, будет нарастать:
где rв — сопротивление обмотки возбуждения, LB — ее индуктивность (влиянием насыщения магнитопровода пренебрегаем).
На рис. 3, а (кривая 1) представлен график зависимости тока возбуждения от времени. Ток возбуждения нарастает постепенно; скорость нарастания определяется соотношением

где Тв — электромагнитная постоянная времени обмотки возбуждения генератора; имеет размерность времени.
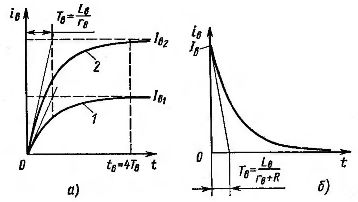
Рис. 3. Изменение тока возбуждения в системе Г—Д
Изменение напряжения генератора при пуске имеет примерно такой же характер, как и изменение силы тока возбуждения. Это дает возможность автоматического прямого пуска двигателя с выведенным реостатом 1 (см. рис. 1).
Нарастание тока возбуждения генератора часто ускоряют (форсируют), прикладывая в начальный момент к обмотке возбуждения напряжение, превышающее номинальное. Процесс нарастания возбуждения будет при этом протекать по кривой 2 (см. рис. 3, а). Когда сила тока в обмотке достигнет величины Iв1 равной установившейся силе тока возбуждения при номинальном напряжении, напряжение на обмотке возбуждения уменьшают до номинального. Время нарастания тока возбуждения до номинального уменьшается.
Для форсирования возбуждения генератора напряжение возбудителя В (см. рис. 1) выбирают в 2—3 раза превышающим номинальное напряжение обмотки возбуждения генератора и вводят в схему добавочный резистор 4. Замыкая на время пуска этот резистор накоротко контактом 5, на обмотку возбуждения подают повышенное напряжение.
Система генератор — двигатель позволяет осуществить торможение с рекуперацией. Для торможения необходимо, чтобы ток в якоре изменил свое направление. Момент при этом также изменит знак и вместо движущего станет тормозным. Торможение возникает при увеличении магнитного потока электродвигателя реостатом 2 или при уменьшении напряжения генератора реостатом 1. В обоих случаях э. д. с. Е двигателя становится выше напряжения U генератора. При этом двигатель Д работает в генераторном режиме и приводится во вращение кинетической энергией движущихся масс, а генератор Г работает в двигательном режиме, вращая со сверхсинхронной скоростью машину АД, которая при этом переходит в режим генератора и отдает энергию в сеть.
Торможение с рекуперацией можно осуществить и без воздействия на реостаты 1 и 2. Можно просто разомкнуть цепь возбуждения генератора (например, переключателем 3). При этом ток в замкнутой цепи, состоящей из обмотки возбуждения генератора и резистора 6, будет постепенно уменьшаться
где R — сопротивление резистора 6.
График, соответствующий этому уравнению, приведен на рис. 3, б. Постепенное уменьшение тока возбуждения генератора в данном случае равносильно увеличению сопротивления реостата 1 (см. рис.1) и вызывает рекуперативное торможение. В данной схеме резистор 6, включенный параллельно обмотке возбуждения генератора, является разрядным. Он предохраняет изоляцию обмотки возбуждения от пробоя в случае внезапного аварийного обрыва цепи возбуждения.
При обрыве цепи возбуждения магнитный поток машины резко уменьшается, наводит в витках обмотки возбуждения э. д. с. самоиндукции настолько большую, что она может вызвать пробой изоляции обмотки. Разрядный резистор 6 создает контур, в котором э. д. с. самоиндукции обмотки возбуждения вызывает ток, замедляющий уменьшение магнитного потока.
Падение напряжения на разрядном резисторе равно напряжению на обмотке возбуждения. Чем меньше величина разрядного сопротивления, тем меньше будет напряжение на обмотке возбуждения при разрыве цепи. Вместе с тем при уменьшении величины сопротивления разрядного резистора возрастают непрерывно протекающий по нему в нормальном режиме ток и потери в нем. При выборе величины разрядного сопротивления должны быть учтены оба указанных положения.
После отключения обмотки возбуждения генератора на его зажимах вследствие остаточного магнетизма сохраняется некоторое небольшое напряжение. Оно может вызвать медленное вращение двигателя с так называемой ползучей скоростью. Для устранения этого явления обмотку возбуждения генератора после отключения от возбудителя присоединяют к зажимам генератора так, чтобы напряжение от остаточного магнетизма вызвало в обмотке возбуждения генератора размагничивающий ток.
Для реверса электродвигателя Д меняют направление тока в обмотке возбуждения ОВГ генератора Г посредством переключателя 3 (или иного аналогичного устройства). Вследствие значительной индуктивности обмотки ток возбуждения при этом постепенно уменьшается, меняет направление, а затем постепенно нарастает.
Процессы пуска, торможения и реверса двигателя в рассматриваемой системе отличаются высокой экономичностью, так как их осуществляют без применения реостатов, включенных в цепь якоря. Двигатель пускают и тормозят с помощью легкой и компактной аппаратуры, управляющей лишь небольшими токами возбуждения. Поэтому данную систему «генератор — двигатель постоянного тока» целесообразно использовать для работы с частыми пусками, торможениями и реверсами.
Основными недостатками системы генератор — двигатель постоянного тока являются относительно низкий коэффициент полезного действия, высокая стоимость и громоздкосгь, определяемые наличием в системе большого числа электрических машин. Стоимость системы превышает стоимость одного короткозамкнутого асинхронного двигателя такой же мощности в 8 — 10 раз. Кроме того, такая система электропривода требует много места.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
http://www.electroengineer.ru/2013/07/system-generator-electric-motor.html
http://electricalschool.info/elprivod/927-sistema-generator-dvigatel-postojannogo.html