iSopromat.ru

Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
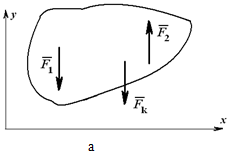
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
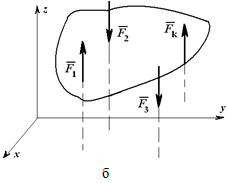
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
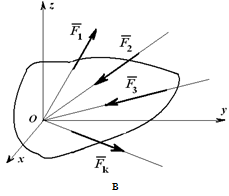
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
и два уравнения для плоской системы:
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Условия равновесия системы сил в теоретической механике
Содержание:
Условия равновесия системы сил:
Условия равновесия системы сил в векторной форме
Из теоремы о приведении системы сил к силе и паре сил можно вывести условия равновесия системы сил, действующих на твердое тело. Очевидно, что если система сил находится в равновесии, то в равновесии находится и эквивалентная ей система, состоящая из силы и пары сил. Чтобы такая система сил была эквивалентна _ нулю, необходимо и достаточно равенства нулю как силы 
Условия (11) являются векторными условиями равновесия для любой системы сил.
Условия равновесия пространственной системы сил в аналитической форме
Если при равновесии системы сил, приложенных к твердому телу, главный вектор равен нулю, то его проекция на каждую координатную ось также равна нулю. Это справедливо и для главного момента  . Таким образом, из векторных условий равновесия пространственной системы сил следует шесть условий:
. Таким образом, из векторных условий равновесия пространственной системы сил следует шесть условий:

Учитывая формулы (5) и (7), эти шесть условий через силы системы выражают в форме
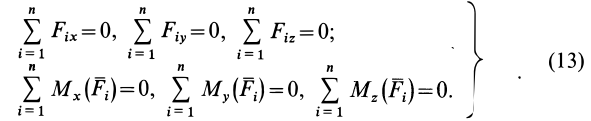
Таким образом, для равновесия пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы три суммы проекций всех сил на оси декартовых координат были равны нулю и три суммы моментов всех сил относительно трех осей координат также были равны нулю.
Из общих условий равновесия для произвольной пространственной системы сил получаются условия равновесия для частных систем сил, приложенных к твердому телу.
Условия равновесия пространственной системы параллельных сил
Направим ось  параллельно силам
параллельно силам  (рис. 37). Тогда проекции параллельных сил на перпендикулярные им оси
(рис. 37). Тогда проекции параллельных сил на перпендикулярные им оси  и
и  будут равны нулю и условия
будут равны нулю и условия
окажутся справедливыми для всех систем параллельных сил, т. е. превратятся в тождества. Момент относительно оси каждой из параллельных сил равен нулю, и условие 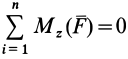 тоже выполняется для всех систем параллельных сил. Отбрасывая
тоже выполняется для всех систем параллельных сил. Отбрасывая
условия равновесия, которые выполняются тождественно при выбранном направлении оси , и учитывая, что сумма проекций сил на эту ось является алгебраической суммой сил, из (13) получаем следующие три условия равновесия пространственной системы параллельных сил:
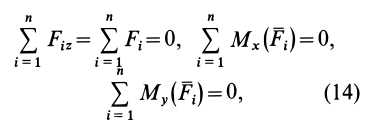
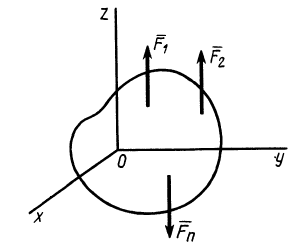
Рис. 37
т. е. для равновесия пространственной системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма этих сил была равна нулю и суммы моментов сил относительно двух координатных осей, перпендикулярных силам, также были равны нулю.
Условия равновесия плоской системы сил
Расположим оси  и в плоскости действия сил (рис. 38). Так как ось
и в плоскости действия сил (рис. 38). Так как ось  перпендикулярна силам, то
перпендикулярна силам, то  выполняется для всех плоских систем сил, т. е. является тождеством. Каждая из сил расположена в одной плоскости с осями координат и , и поэтому ее моменты относительно этих осей равны нулю. Таким образом, условия равновесия
выполняется для всех плоских систем сил, т. е. является тождеством. Каждая из сил расположена в одной плоскости с осями координат и , и поэтому ее моменты относительно этих осей равны нулю. Таким образом, условия равновесия
становятся тождествами. Моменты сил относительно оси , перпендикулярной силам, равны алгебраическим моментам этих сил относительно точки  . Таким образом,
. Таким образом,
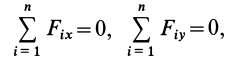
Из (13) для плоской системы сил после отбрасывания тождеств имеем следующие три условия равновесия:

т. е. для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равна нулю.
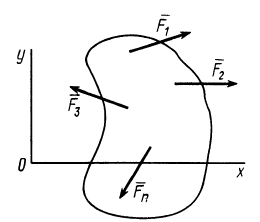
Рис. 38
Для плоской системы параллельных сил (рис. 39) одну из осей координат, например , можно выбрать параллельной силам. Тогда сумма проекций параллельных сил на эту ось превратится в алгебраическую сумму сил. Проекция каждой из сил на ось равна нулю; следовательно, сумма проекций сил на ось равна нулю, даже если система сил не находится в равновесии. Это условие выполняется тождественно, и его следует отбросить.
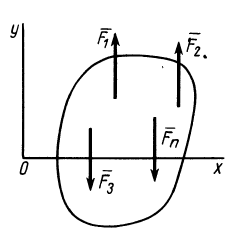
Рис. 39
Итак, для плоской системы параллельных сил из (15) имеем следующие условия равновесия:

т. е. для равновесия плоской системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма сил была равна нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости сил, также была равна нулю.
Из условий равновесия плоской системы сил (15) можно получить и условия равновесия плоской системы сходящихся сил, для чего за моментную точку надо взять точку пересечения линий действия сходящихся сил. Тогда последнее из условий станет тождеством и в качестве условий равновесия для плоской системы сходящихся сил останутся только два первых условия из (15).
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Плоская система сил
- Трение
- Пространственная система сил
- Центр тяжести
- Система сходящихся сил
- Моменты силы относительно точки и оси
- Теория пар сил
- Приведение системы сил к простейшей системе
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Равновесие произвольной пространственной системы сил – решение задачи
![]()
Порядок решения задач на равновесие с произвольной пространственной системой сил
Чтобы решить задачу на равновесие твердого тела с произвольной пространственной системой сил, надо выбрать прямоугольную систему координат и, относительно нее, составить уравнения равновесия.
Уравнения равновесия, для произвольной системы сил, распределенных в трехмерном пространстве, представляют собой два векторных уравнения:
векторная сумма сил, действующих на тело, равна нулю
(1) ;
векторная сумма моментов сил, относительно начала координат, равна нулю
(2) .
Пусть Oxyz – выбранная нами система координат. Спроектировав уравнения (1) и (2) на оси этой системы, получим шесть уравнений:
суммы проекций сил на оси xyz равны нулю
(1.x) ;
(1.y) ;
(1.z) ;
суммы моментов сил относительно осей координат равны нулю
(2.x) ;
(2.y) ;
(2.z) .
Здесь мы считаем, что на тело действуют n сил, включая силы реакций опор.
Пусть произвольная сила , с компонентами , приложена к телу в точке . Тогда моменты этой силы относительно осей координат определяются по формулам:
(3.x) ;
(3.y) ;
(3.z) .
Таким образом, порядок решения задачи, на равновесие с произвольной пространственной системой сил, следующий.
- Отбрасываем опоры и заменяем их силами реакций. Если опорой является стержень или нить, то сила реакции направлена вдоль стержня или нити.
- Выбираем прямоугольную систему координат Oxyz .
- Находим проекции векторов сил на оси координат, , и точек их приложения, . Точку приложения силы можно перемещать вдоль прямой, проведенной через вектор силы. От такого перемещения значения моментов не изменятся. Поэтому выбираем наиболее удобные для расчета точки приложения сил.
- Составляем три уравнения равновесия для сил (1.x,y,z).
- Для каждой силы, по формулам (3.x,y,z), находим проекции моментов силы на оси координат.
- Составляем три уравнения равновесия для моментов сил (2.x,y,z).
- Если число переменных больше числа уравнений, то задача статически неопределима. Методами статики ее решить нельзя. Нужно использовать методы сопротивления материалов.
- Решаем полученные уравнения.
Упрощение расчетов
В некоторых случаях удается упростить вычисления, если вместо уравнения (2) использовать эквивалентное условие равновесия.
Сумма моментов сил относительно произвольной оси AA′ равна нулю:
(4) .
То есть можно выбрать несколько дополнительных осей, не совпадающих с осями координат. И относительно этих осей составить уравнения (4).
Далее приводится пример, в котором удается упростить вычисления за счет соответствующего выбора осей.
Пример решения задачи на равновесие произвольной пространственной системы сил
![]()
Найти реакции стержней, поддерживающих тонкую однородную горизонтальную плиту в трехмерном пространстве. Система крепления стержней показана на рисунке. На плиту действуют: сила тяжести G; и сила P, приложенная в точке A, направленная вдоль стороны AB.
Дано:
G = 28 kН ; P = 35 kН ; a = 7,5 м ; b = 6,0 м ; c = 3,5 м .
Решение задачи
Сначала мы решим эту задачу стандартным способом, применимым для произвольной пространственной системы сил. А затем получим более простое решение, основываясь на конкретной геометрии системы, за счет выбора осей при составлении уравнений равновесия.
Решение задачи стандартным способом
Этот метод хоть и приведет нас к довольно громоздким вычислениям, но он применим для произвольной пространственной системы сил, и может применяться в расчетах на ЭВМ.
Отбросим связи и заменим их силами реакций. Связями здесь являются стержни 1–6. Вводим вместо них силы , направленные вдоль стержней. Направления сил выбираем наугад. Если мы не угадаем с направлением какой-либо силы, то получим для нее отрицательное значение.
![]()
Проводим систему координат Oxyz с началом в точке O .
Находим проекции сил на оси координат.
Для силы имеем:
.
Здесь α 1 – угол между LQ и BQ . Из прямоугольного треугольника LQB :
м ;
;
.
Силы , и параллельны оси z . Их компоненты:
;
;
.
Для силы находим:
.
Здесь α 3 – угол между QT и DT . Из прямоугольного треугольника QTD :
м ;
;
.
Для силы :
.
Здесь α 5 – угол между LO и LA . Из прямоугольного треугольника LOA :
м ;
;
.
Сила направлена по диагонали прямоугольного параллелепипеда. Она имеет следующие проекции на оси координат:
.
Здесь – направляющие косинусы диагонали AQ :
м ;
;
;
.
Выбираем точки приложения сил. Воспользуемся тем, что их можно перемещать вдоль линий, проведенных через векторы сил. Так, в качестве точки приложения силы можно взять любую точку на прямой TD . Возьмем точку T , поскольку для нее x и z — координаты равны нулю:
.
Аналогичным способом выбираем точки приложения остальных сил.
В результате получаем следующие значения компонентов сил и точек их приложений:
; (точка B );
; (точка Q );
; (точка T );
; (точка O );
; (точка A );
; (точка A );
; (точка A );
; (точка K ).
Составляем уравнения равновесия для сил. Суммы проекций сил на оси координат равны нулю.
;
;
.
Составляем уравнения равновесия для моментов сил. Суммы моментов сил относительно осей координат равны нулю.
;
;
;
В этой системе шесть уравнений и шесть неизвестных. Далее сюда можно подставить численные значения и получить решение системы, используя математическую программу вычисления системы линейных уравнений.
Но, для этой задачи, можно получить решение без использования средств вычислительной техники.
Эффективный способ решения задачи
Мы воспользуемся тем, что уравнения равновесия можно составлять не единственным способом. Можно произвольным образом выбирать систему координат и оси, относительно которых вычисляются моменты. Иногда, за счет выбора осей, можно получить уравнения, которые решаются более просто.
Воспользуемся тем, что, в равновесии, сумма моментов сил относительно любой оси равна нулю. Возьмем ось AD . Сумма моментов сил относительно этой оси равна нулю:
(П7) .
Далее заметим, что все силы, кроме пересекают эту ось. Поэтому их моменты равны нулю. Не пересекает ось AD только одна сила . Она также не параллельна этой оси. Поэтому, чтобы выполнялось уравнение (П7), сила N 1 должна равняться нулю:
N 1 = 0 .
Теперь возьмем ось AQ . Сумма моментов сил относительно нее равна нулю:
(П8) .
Эту ось пересекают все силы, кроме . Поскольку сила не параллельна этой оси, то для выполнения уравнения (П8) необходимо, чтобы
N 3 = 0 .
Теперь возьмем ось AB . Сумма моментов сил относительно нее равна нулю:
(П9) .
Эту ось пересекают все силы, кроме , и . Но N 3 = 0 . Поэтому
.
Момент от силы относительно оси равен произведению плеча силы на величину проекции силы на плоскость, перпендикулярную оси. Плечо равно минимальному расстоянию между осью и прямой, проведенной через вектор силы. Если закручивание происходит в положительном направлении, то момент положителен. Если в отрицательном – то отрицательный. Тогда
.
Отсюда
kН .
Остальные силы найдем из уравнений (П1), (П2) и (П3). Из уравнения (П2):
N 6 = 0 .
Из уравнений (П1) и (П3):
kН ;
kН
Таким образом, решая задачу вторым способом, мы использовали следующие уравнения равновесия:
;
;
;
;
;
.
В результате мы избежали громоздких расчетов, связанных с вычислениями моментов сил относительно осей координат и получили линейную систему уравнений с диагональной матрицей коэффициентов, которая сразу разрешилась.
N 1 = 0 ; N 2 = 14,0 kН ; N 3 = 0 ; N 4 = -2,3 kН ; N 5 = 38,6 kН ; N 6 = 0 ;
Знак минус указывает на то, что сила N 4 направлена в сторону, противоположную той, которая указана на рисунке.
Автор: Олег Одинцов . Опубликовано: 13-11-2017
http://www.evkova.org/usloviya-ravnovesiya-sistemyi-sil-v-teoreticheskoj-mehanike
http://1cov-edu.ru/mehanika/statika/ravnovesie-prostranstvennoj-sistemy-sil/