iSopromat.ru

Моментом силы называют вращательное усилие создаваемое вектором силы относительно твердого тела, оси или точки. 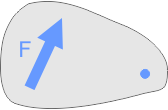
Размерность — [Н∙м] (Ньютон на метр) либо кратные значения [кН∙м]
Аналогом момента силы является момент пары сил.
Обязательным условием возникновения момента является то, что точка, относительно которой создается момент не должна лежать на линии действия силы.
Определение
Момент определяется как произведение силы F на плечо h:
Плечо силы h, определяется как кратчайшее расстояние от точки до линии действия силы.
Наш короткий видеоурок про момент силы с примерами: 
Например, сила величиной 7 кН приложенная на расстоянии 35см от рассматриваемой точки дает момент M=7×0,35=2,45 кНм.
Пример момента силы
Наиболее наглядным примером момента силы может служить поворачивание гайки гаечным ключом.
Гайки заворачиваются вращением, для этого к ним прикладывается момент, но сам момент возникает при воздействии нашей силы на гаечный ключ.
Вы конечно интуитивно понимаете — для того чтобы посильнее закрутить гайку надо взяться за ключ как можно дальше от нее.
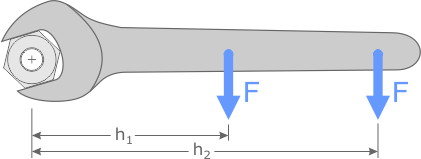
В этом случае, прикладывая ту же силу, мы получаем большую величину момента за счет увеличения её плеча (h2>h1).
Плечом при этом служит расстояние от центра гайки до точки приложения силы.
Плечо момента силы
Рассмотрим порядок определения плеча h момента:
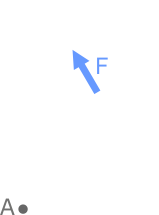
Пусть заданы точка A и некоторая произвольная сила F, линия действия которой не проходит через эту точку. Требуется определить момент силы.
Покажем линию действия силы F (штриховая линия)
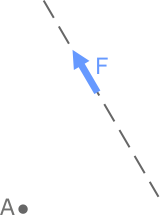
Проведем из точки A перпендикуляр h к линии действия силы
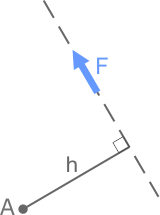
Длина отрезка h есть плечо момента силы F относительно точки A.
Момент принимается положительным, если его вращение происходит против хода часовой стрелки (как на рисунке).
Так принято для того, чтобы совпадали знаки момента и создаваемого им углового перемещения.
Моменты в теоретической механике
Вы будете перенаправлены на Автор24
Теоретическая механика представляет раздел физики, в котором изложены основные законы механических взаимодействий и движений материальных тел.
Понятие момента силы в теоретической механике
В теоретической механике говорится о таком понятии, как момент силы. Он представляет собой величину, характеризующую вращательную способность силы.
Парой сил считается система двух параллельных, противоположно направленных и равнозначных по модулю сил: $\vec
Системой сил является комплекс сил, оказывающих непосредственное воздействие на механическую систему. Плоскую систему при этом представляют силы, чьи линии действия лежат в одной плоскости. Пространственную систему – силы, у которых линии действия не лежат в одинаковой плоскости.
Систему сходящихся сил представляют силы, чьи линии действия будут пересекаться в одной точке. В произвольной системе линии действия сил не будут пересекаться в одной точке.
Равновесное состояние характеризует такое положение, тело при котором в момент действия сил или сохраняет неподвижность, или движется равномерным и прямолинейным образом.
Уравновешенной системой сил считается такая система, которая, прилагаясь к свободному твердому телу, сохраняет неизменность его механического состояния (то есть не выводит из равновесия). Равнодействующей силой будет та сила, чье воздействие на тело эквивалентно действиям системы сил.
Проекцию силы на ось представляет заключенный между перпендикулярами отрезок. При этом они проведены из начала и конца вектора силы к данной оси. Проекция положительная при совпадении направленности отрезка и положительного направления оси. Проекцию силы на плоскость представляет вектор на плоскости между перпендикулярами, которые проведены из начала и конца вектора силы к такой плоскости.
Готовые работы на аналогичную тему
Момент силы относительно оси
Моментом силы относительно оси будет считаться момент проекции такой силы на перпендикулярную оси плоскость в отношении точки их пересечения.
Момент окажется положительным при условии, что поворот, совершаемый силой, осуществляется против часовой стрелки, и отрицательным – если против, записывается это формулой:
$M_z (\vec
Для нахождения момента силы относительно оси нужно:
- провести перпендикулярно оси $z$ плоскость и спроецировать на нее силу $F$;
- спроецировать силу $F$ на вышеуказанную плоскость с последующим вычислением величины проекции $F_xy$;
- провести $h$ (плечо) из точки, где пересекается ось с плоскостью, на линию действия проекции $F_xy$ с последующим определением его длины;
- вычислить произведение этого плеча, а также — проекции силы с соответствующим знаком.
Нулевое значение момент силы относительно оси обретает в том случае, когда $F_xy=0$ (при параллельности силы $F$ оси). Второе условие заключается в том, что линия действия силы будет пересекать ось, т.е. $h=0$.
Равнодействующую $R$ двух сходящихся сил находят по аксиоме параллелограмма сил. Геометрическую сумму любого числа сходящихся сил вычисляют посредством последовательного суммирования двух сил (способом векторного многоугольника).
Таким образом, систему сходящихся сил $\vec
Аналитически равнодействующую силу определяют ее проекцией на оси координат:
Исходя из теоремы, проекция равнодействующей на ось вычисляется формулой:
С учетом этого, равнодействующую определяет выражение:
Действие системы для сходящихся сил будет эквивалентным действию одной равнодействующей силы. Условием равновесия тела считается нулевое значение равнодействующей, т.е. $\vec
Из формулы $R=\sqrt<(\sum
Необходимым условием равновесия для плоской будет нулевое значение суммы проекций всех сил на оси $X$, $Y$:
Момент силы относительно точки
Абсолютное значение момента в теоретической механике вычисляется формулой: $M_0(\vec
При положительном моменте сила вращает плечо $h$ против часовой стрелки, а при отрицательном – по часовой.
Согласно свойствам момента силы относительно точки, он сохраняет свою неизменность, если точка приложения силы переносится вдоль линии ее действия. Еще одно свойство проявляется в том, что момент равнодействующей силы относительно точки определяет сумма моментов слагаемых сил в отношении этой точки:
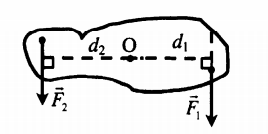
Момент пары сил
Момент пары сил определяет формула: $M(\vec
Момент пары окажется положительным при стремлении сил к вращению плеча против часовой стрелки. Свойства пары сил выражены в: нулевом значении суммы проекций сил на ось; неизменности момента пары при одновременном изменении значения сил и плеча пары, возможности переноса пары в плоскости ее действия при неизменности действия пары на тело.
Момент силы относительно точки будет выражать следующая формула: $M_0(\vec
Свойства момента силы в отношении точки выражаются в следующем: его неизменности в момент переноса точки приложения силы вдоль линии ее действия; момент равнодействующей силы в отношении точки представляет суммарное значение моментов слагаемых сил относительно нее: $M_0(\vec
Приложенную к твердому телу силу возможно перенести. При этом будет неизменным оказываемое ею действие, а перенос осуществляется параллельно в другую точку тела. Также при этом добавляется пара сил с моментом, равнозначным переносимой силе относительно точки, куда она переносится. Вследствие вышеуказанного преобразования мы наблюдаем формирование сходящейся системы сил и суммы моментов пар сил. Действие такой системы заменяют действия суммарной силы, а действие моментов — суммарный момент.
Суммарный вектор $\vec
Итогом становится тождественное преобразование произвольной системы сил в главный вектор и момент такой системы. Аналитически главный вектор и момент системы могут определяться их проекциями на оси координат:
Момент силы и правило моментов
теория по физике 🧲 статика
Статика — раздел механики, изучающий условия равновесия тел.
Виды равновесия
Устойчивое равновесие
Неустойчивое равновесие
Безразличное равновесие
Момент силы
Момент силы — векторная физическая величина, модуль которой равен произведению модуля силы на плечо силы:
M — момент силы. Единица измерения — Ньютон на метр (Н∙м). Направление вектора момента силы всегда совпадает с направлением вектора силы. d — плечо силы. Единица измерения — метр (м).
Плечо силы — кратчайшее расстояние между осью вращения и линией действия силы.
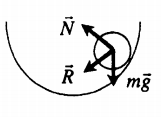
Пример №1. Стальной шар массой 2 кг колеблется на нити длиной 1 м. Чему равен момент силы тяжести относительно оси, проходящей через точку О перпендикулярно плоскости чертежа, в состоянии, представленном на рисунке?
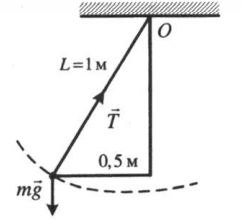
Плечом силы тяжести, или кратчайшим путем от прямой, проходящей через точку О перпендикулярно плоскости чертежа, до линии действия силы тяжести, будет отрезок, равный максимальному отклонению шара от положения равновесия. Следовательно:
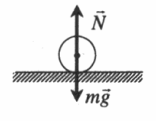
Момент силы может быть положительным и отрицательным.
Если сила вызывает вращение тела по часовой стрелке, то такой момент считают положительным:
Если сила вызывает вращение тела против часовой стрелки, то такой момент считают отрицательным:
Правило моментов
Тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
Иначе правило моментов можно сформулировать так:
Сумма моментов сил, вызывающих вращение тела по часовой стрелке, равна сумме моментов сил, вызывающих вращение тела против часовой стрелки.
∑ M п о ч а с . с т р . = ∑ M п р . ч а с . с т р .
Условия равновесия тел
| Тело не участвует в поступательном движении: | |
| Тело не участвует во вращательном движении: | |
| Тело находится в состоянии равновесия (не участвует ни в поступательном, ни во вращательном движении) | |
 | Дает выигрыш в силе. Чтобы поднять груз на высоту h, нужно приложить силу, равную силе тяжести этого груза. Но, используя наклонную плоскость, можно приложить силу, равную произведению силы тяжести на синус угла уклона плоскости: Рычаг |
 | Дает выигрыш в силе, равный отношению плеча второй силы к плечу первой: F 1 F 2 . . = d 2 d 1 . . Неподвижный блок |
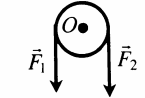 | Изменяет направление действия силы. Модули и плечи сил при этом равны: Подвижный блок |
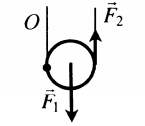 | Дает выигрыш в силе в 2 раза: |
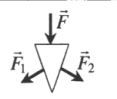 | Делит силу на две равные части, направление которых зависит от формы клина: |
Золотое правило механики
При использовании простых механизмов мы выигрываем в силе, но проигрываем в расстоянии. Поэтому выигрыша в работе простые механизмы не дают.
Алгоритм решения
Решение
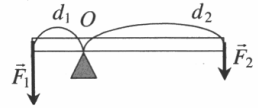
Известна лишь масса батона: m1 = 0,8 кг. Но мы также можем выразить плечи для силы тяжести батона и хлеба. Для этого длину линейки примем за один. Так как линейка поделена на 10 секций, можем считать, что длина каждой равна 0,1. Тогда плечи сил тяжести батона и рыба соответственно равны:
Запишем правило моментов:
Сила тяжести равна произведению массы на ускорение свободного падения. Поэтому:
Отсюда масса рыбы равна:
m 2 = m 1 d 1 d 2 . . = 0 , 8 · 0 , 3 0 , 4 . . = 0 , 6 ( к г )
pазбирался: Алиса Никитина | обсудить разбор | оценить
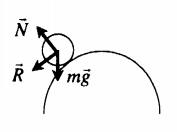
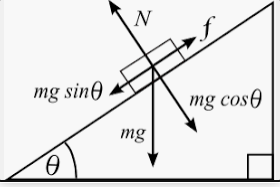
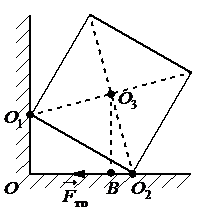 Однородный куб опирается одним ребром на пол, другим на вертикальную стену (см. рисунок). Плечо силы трения F → тр «> F тр относительно оси, проходящей через точку О3 перпендикулярно плоскости чертежа, равно.
Однородный куб опирается одним ребром на пол, другим на вертикальную стену (см. рисунок). Плечо силы трения F → тр «> F тр относительно оси, проходящей через точку О3 перпендикулярно плоскости чертежа, равно.
Алгоритм решения
- Сформулировать определение плеча силы.
- Найти плечо силы трения и аргументировать ответ.
Решение
Плечом силы трения называют кратчайшее расстояние от оси вращения до линии, вдоль которой действует сила. Чтобы найти такое расстояние, нужно провести из точки равновесия перпендикуляр к линии действия силы трения. Отрезок, заключенный между этой точкой и линией, будет являться плечом силы трения. На рисунке этому отрезку соответствует отрезок О3В.
pазбирался: Алиса Никитина | обсудить разбор | оценить
http://spravochnick.ru/fizika/teoreticheskaya_mehanika/momenty_v_teoreticheskoy_mehanike/
http://spadilo.ru/moment-sily-i-pravilo-momentov/