Уравнение моментов
Определение и уравнение моментов
Пусть O — любая неподвижная точка в инерциальной системе отсчета. Это называется началом или полюсом. Обозначим через радиус-вектор, взятый от этой точки до точки приложения силы (рис.1).
Момент силы относительно точки O является векторным произведением радиус-вектора и силы :
направление выбрано так, что последовательность векторов образует правую систему, т. е. если вы посмотрите вдоль вектора ,то поворот вдоль кратчайшего пути от первого фактора в (1) до вторая выполняется по часовой стрелке, таким образом совпадает с направлением поступательного движения правого штыря, ручка которого вращается от до вдоль кратчайшего пути.
Моментом нескольких сил относительно точки является векторная сумма моментов этих сил относительно одной и той же точки:
Момент импульса материальной точки
Момент импульса материальной точки относительно точки O является векторным произведением радиус-вектора и импульса
где J — момент инерции, — угловая скорость вращения тела.
Система из n материальных точек — это момент количества движения относительно некоторой точки O — векторная сумма моментов импульсов этих точек относительно того же начала:
Временная производная от момента импульса механической системы относительно неподвижной точки (полюса О) равна сумме внешних силовых моментов , действующих на систему:
Для материальной точки уравнение момента написано:
Уравнение (6) называется моментом для системы материальных точек. Это основной закон динамики твердого тела, вращающегося вокруг неподвижной точки.
В проекциях на оси фиксированной декартовой системы координат с началом на полюсе O уравнение моментов системы записывается в виде:
где — проекция момента количества движения на соответствующей оси; — проекции полного момента сил на соответствующую ось.
Уравнение моментов позволяет получить ответ на следующие вопросы:
1. найти момент силы (общий момент внешних сил) относительно интересующей нас точки в любой момент времени, если известна зависимость момента количества движения частицы (системы частиц) от одной и той же точки;
2. определить приращение углового момента частицы (системы частиц) относительно точки O для любого периода времени, если временная зависимость силового момента (полного момента внешних сил), действующего на эту частицу (система частиц) относительно одной и той же точки.
Примеры решения проблем
Сравните угловые скорости, полученные материальной точкой под действием крутящих моментов, графики (a, b) которых показаны на рисунках.
В соответствии с уравнением моментов для материальной точки мы имеем:
поскольку мы имеем дело с материальной точкой, соответственно, J не зависит от времени, получаем:
Вспомните геометрический смысл интеграла.
Вычислить и сравнить площадь треугольников OAB и OCD.
Области треугольников равны соответственно
Угловые скорости, полученные материальной точкой, равны в первом и втором случаях.
Горизонтальный диск с радиусом R = 0,2 м и массой m = 5 кг вращается вокруг оси, проходящей через ее центр. Зависимость угловой скорости вращения диска от времени определяется уравнением w = A + 8t. Найдите значение касательной силы, приложенной к ободу диска. Трение пренебрегалось.
Мы делаем рисунок
Запишем уравнение моментов:
где — искомая сила. Перепишите (2.2), найдите модуль: — угол между вектором и равен , так как силы, касательные к диску, направлены вдоль радиуса диска в точку касания, следовательно, M = RF.
Поскольку мы имеем дело с телом, который не меняет момент инерции со временем, мы имеем:
Где — момент инерции диска относительно оси, проходящей через его центр.
Подставим числовые значения, получим:
Величина (модуль) касательной силы, приложенной к краю диска, равна 4 N.
Уравнение моментов: моменты силы, импульса и инерции

Если линейное перемещение тел описывают в классической механике с помощью законов Ньютона, то характеристики движения механических систем по круговым траекториям вычисляют с помощью специального выражения, которое называется уравнением моментов. О каких моментах идет речь и в чем заключается смысл этого уравнения? Эти и другие вопросы раскрываются в статье.
Момент силы
Всем хорошо известна ньютоновская сила, которая, действуя на тело, приводит к сообщению ему ускорения. Когда же такая сила прилагается к объекту, который закреплен на некоторой оси вращения, то эту характеристику принято называть моментом силы. Уравнение момента силы может быть записано в следующем виде:
Рисунок, поясняющий это выражение, приведен ниже.
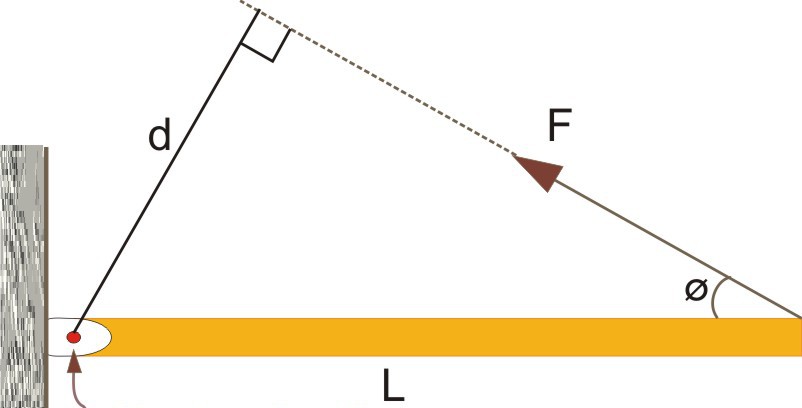
Здесь видно, что сила F¯ направлена к вектору L¯ под углом Φ. Сам же вектор L¯ полагается направленным от оси вращения (указана стрелкой) к точке приложения F¯.
Приведенная выше формула представляет собой произведение двух векторов, поэтому величина M¯ также является направленной. Куда будет повернут момент силы M¯? Это можно определить по правилу правой руки (четыре пальца направлены вдоль траектории от конца вектора L¯ к концу F¯, а отставленный палец большой показывает направление M¯).
На рисунке выше выражение для момента силы в скалярном виде примет форму:
Если внимательно всмотреться в рисунок, то можно увидеть, что L*sin(Φ) = d, тогда имеем формулу:
Величина d является важной характеристикой при вычислении момента силы, поскольку она отражает эффективность приложенной F к системе. Эту величину принято называть рычагом силы.
Физический смысл M заключается в способности силы совершить вращение системы. Эту способность может ощутить на себе каждый, если будет открывать дверь за ручку, толкая ее около петель, или же попробует открутить гайку коротким и длинным ключом.
Равновесие системы
Понятие о моменте силы оказывается очень полезным, когда рассматривают равновесие системы, на которую действуют несколько сил, и которая имеет ось или точку вращения. В таких случаях применяют формулу:
То есть система будет находиться в равновесии, если сумма всех моментов сил, приложенных к ней, нулевая. Заметим, что в этой формуле присутствует знак вектора над моментом, то есть при решении следует не забывать учитывать знак этой величины. Общепринятым правилом считается, что действующая сила, которая вращает систему против часовой стрелки, создает положительный Mi¯.

Ярким примером задач рассматриваемого типа являются проблемы с равновесием рычагов Архимеда.
Момент импульса
Это еще одна важная характеристика движения по окружности. В физике ее описывают произведением количества движения на рычаг. Уравнение момента импульса имеет такой вид:
Здесь p¯ — вектор импульса, r¯ — вектор, соединяющий вращающуюся материальную точку с осью.
Поясняющий это выражение рисунок приведен ниже.
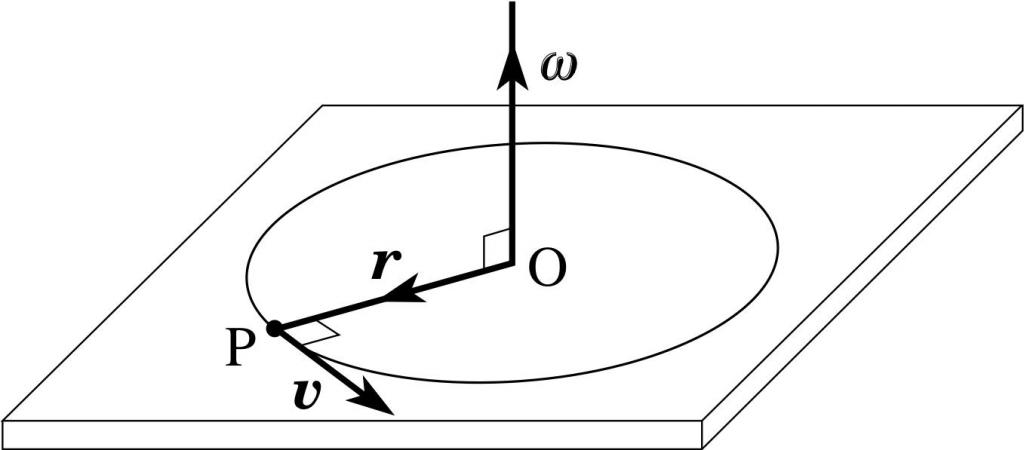
Здесь ω — угловая скорость, которая дальше появится в уравнении моментов. Заметим, что направление вектора T¯ находится по тому же правилу, что и M¯. На рисунке выше T¯ по направлению будет совпадать с вектором угловой скорости ω¯.
Физический смысл величины T¯ является таким же, как и характеристики p¯ в случае линейного движения, то есть момент импульса описывает количество вращательного движения (запасенную кинетическую энергию).
Момент инерции
Третья важная характеристика, без которой невозможно составить уравнение движения вращающегося объекта, — это момент инерции. Появляется он в физике в результате математических преобразований формулы для момента импульса материальной точки. Покажем, как это делается.
Представим величину T¯ в следующем виде:
T¯ = r¯*m*v¯, где p¯ = m*v¯
Пользуясь связью между угловой и линейной скоростями, можно переписать это выражение следующим образом:
T¯ = r¯*m*r¯*ω¯, где v¯ = r¯*ω¯
Последнее выражение запишем в виде:
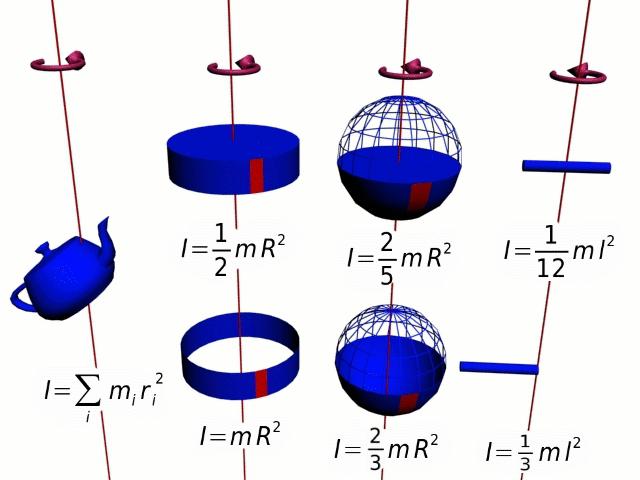
Величина r 2 *m — это момент инерции I для точки массой m, которая совершает круговое движение вокруг оси на расстоянии от нее r. Этот частный случай позволяет ввести общее уравнение момента инерции для тела произвольной формы:
I — это аддитивная величина, смысл которой заключается в инерционности вращающейся системы. Чем больше I, тем труднее раскрутить тело, и необходимо приложить значительные усилия, чтобы его остановить.
Уравнение моментов
Мы рассмотрели три величины, название которых начинается со слова «момент». Это сделано было намеренно, поскольку все они связаны в одно выражение, получившее название уравнения 3 моментов. Выведем его.
Рассмотрим выражение для момента импульса T¯:
Найдем, как изменяется величина T¯ во времени, имеем:
Учитывая, что производная угловой скорости равна таковой для скорости линейной, деленной на r, а также раскрывая величину I, приходим к выражению:
dT¯/dt = m*r 2 *1/r*dv¯/dt = r*m*a¯, где a¯ = dv¯/dt — линейное ускорение.
Заметим, что произведение массы на ускорение — это не что иное, как действующая внешняя сила F¯. В итоге получаем:
Мы пришли к интересному выводу: изменение момента импульса равно моменту действующей внешней силы. Это выражение принято записывать в несколько иной форме:
M¯ = I*α¯, где α¯ = dω¯/dt — угловое ускорение.
Это равенство называется уравнением моментов. Оно позволяет рассчитать любую характеристику вращающегося тела, зная параметры системы и величину внешнего воздействия на нее.
Закон сохранения T¯
Полученный в предыдущем пункте вывод свидетельствует о том, что если внешний момент сил будет равен нулю, то момент импульса меняться не будет. В таком случае запишем выражение:
Эта формула носит название закона сохранения величины T¯. То есть любые изменения внутри системы суммарный момент импульса не меняют.
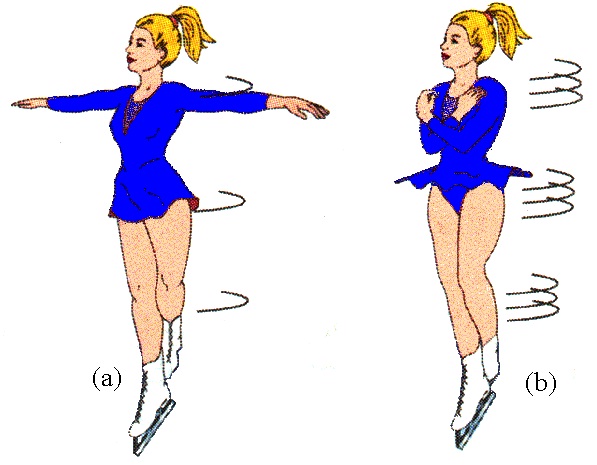
Этот факт используется фигуристами и балеринами во время их выступлений. Также его применяют, если необходимо выполнить поворот вокруг своей оси искусственного спутника, движущегося в космосе.
Уравнение движения центра масс
1. Уравнение движения центра масс

2. Уравнение моментов относительно оси, проходящей через центр масс

Особенностью плоского движения является то, что ось вращения сохраняет свою ориентацию в пространстве и остается перпендикулярной плоскости, в которой движется центр масс. Еще раз подчеркнем, что уравнение моментов (3.20) записано относительно, в общем случае, ускоренно движущегося центра масс, однако, как было отмечено в начале лекции, оно имеет такой же вид, как и уравнение моментов относительно неподвижной точки.
В качестве примера рассмотрим задачу о скатывании цилиндра с наклонное плоскости. Приведем два способа решения этой задачи с использованием уравнений динамики твердого тела.
Первый способ. Рассматривается вращение цилиндра относительно оси, проходящее через центр масс (рис. 3.11).
Система уравнений (3.19 — 3.20) имеет вид:
К этой системе необходимо добавить уравнение кинематической связи
Последнее уравнение получается из условия, что цилиндр скатывается без проскальзывания, то есть скорость точки М цилиндра равна нулю.
Уравнение движения центра масс (3.1) запишем для проекций ускорения и сил на ось x вдоль наклонной плоскости, а уравнение моментов (3.22) — для проекций углового ускорения и момента силы трения на ось y , совпадающую с осью цилиндра. Направления осей x и у выбраны согласованно, в том смысле, что положительному линейному ускорению оси цилиндра соответствует положительное же угловое ускорение вращения вокруг этой оси. В итоге получим:
Следует подчеркнуть, что  — сила трения сцепления — может принимать любое значение в интервале от О до
— сила трения сцепления — может принимать любое значение в интервале от О до  (сила трения скольжения) в зависимости от параметров задачи. Работу эта сила не совершает, но обеспечивает ускоренное вращение цилиндра при его скатывании с наклонной плоскости. В данном случае
(сила трения скольжения) в зависимости от параметров задачи. Работу эта сила не совершает, но обеспечивает ускоренное вращение цилиндра при его скатывании с наклонной плоскости. В данном случае
Если цилиндр сплошной, то

Качение без проскальзывания определяется условием

где  — коэффициент трения скольжения,
— коэффициент трения скольжения,  — сила реакции опоры. Это условие сводится к следующему:
— сила реакции опоры. Это условие сводится к следующему:

Второй способ. Рассматривается вращение цилиндра относительно неподвижной оси, совпадающей в данный момент времени с мгновенной осью вращения (рис. 3.12).
Мгновенная ось вращения проходит через точку соприкосновения цилиндра и плоскости (точку М). При таком подходе отпадает необходимость в уравнении движении центра масс и уравнении кинематической связи. Уравнение моментов относительно мгновенной оси имеет вид:

В проекции на ось вращения (ось y)

Ускорение центра масс выражается через угловое ускорение
Кинетическая энергия при плоском движении.
Кинетическая энергия твердого тела представляет собой сумму кинетических энергий отдельных частиц:

где  — скорость центра масс тела,
— скорость центра масс тела,  — скорость i-й частицы относительно системы координат, связанной с центром масс и совершающей поступательное движение вместе с ним. Возводя сумму скоростей в квадрат, получим:
— скорость i-й частицы относительно системы координат, связанной с центром масс и совершающей поступательное движение вместе с ним. Возводя сумму скоростей в квадрат, получим:

так как  (суммарный импульс частиц в системе центра масс равен нулю).
(суммарный импульс частиц в системе центра масс равен нулю).
Таким образом, кинетическая энергия при плоском движении равна сумме кинетических энергий поступательного и вращательного движений (теорема Кенига). Если рассматривать плоское движение как вращение вокруг мгновенной оси, то кинетическая энергия тела есть энергия вращательного движения.
В этой связи задачу о скатывании цилиндра с наклонной плоскости можно решить, используя закон сохранения механической энергии (напомним, что сила трения при качении без проскальзывания работу не совершает).
Приращение кинетической энергии цилиндра равно убыли его потенциальное энергии:
Здесь  — длина наклонной плоскости,
— длина наклонной плоскости,  — момент инерции цилиндра относительно мгновенной оси вращения.
— момент инерции цилиндра относительно мгновенной оси вращения.
Поскольку скорость оси цилиндра  то
то
Дифференцируя обе части этого уравнения по времени, получим

откуда для линейного ускорения  оси цилиндра будем иметь то же выражение, что и при чисто динамическом способе решения (см. (3.27, 3.36)).
оси цилиндра будем иметь то же выражение, что и при чисто динамическом способе решения (см. (3.27, 3.36)).
Замечание. Если цилиндр катится с проскальзыванием, то изменение его кинетической энергии будет определяться также и работой сил трения. Последняя, в отличие от случая, когда тело скользит по шероховатой поверхности, не вращаясь, определяется, в соответствии с (3.14), полным углом поворота цилиндра, а не расстоянием, на которое переместилась его ось.
Динамика твердого тела на данном этапе используется для тел, движущихся в сплошной среде.
В задаче о полете тела с тремя несущими поверхностями при наличии динамической асимметрии определены условия, при которых проявляются синхронизмы 1:3. С увеличением угловой скорости вращения тела около продольной оси даже на поверхности рассеивания заметно ослабление этого эффекта.
Разработана программа имитационного моделирования комплекса задач по динамике полета противоградовых ракет. С ее помощью построены таблицы введения поправок на установочные углы запуска ракет для наилучшей компенсации вредного влияния ветра.
Создана механико-математическая модель полета бумеранга. Открыта лаборатория навигации и управления.
Разработан и внедрен на аэродинамической трубе А-8 комплекс механического оборудования и сопутствующей измерительной аппаратуры для проведения динамических испытаний моделей. Определены коэффициенты демпфирования поперечных колебаний осесимметричных оперенных тел различного удлинения при раскрутке вокруг собственной оси в до- и сверхзвуковом потоках.
На основе численного решения задачи о плоских движениях аэродинамического маятника (с несущей поверхностью в виде прямоугольной пластины) в несжимаемой жидкости с учетом динамики вихрей определены области существования всех типов движения маятника, включая режимы автоколебаний и авторотации. Открыта лаборатория сверхзвуковой аэродинамики.
Также в институте компьютерных исследований проводят значимые исследования по динамике твердого тела.
Это направление исследований института связано с анализом движения твердого тела с широким применением компьютерных методов.
Компьютерные исследования в динамике твердого тела относятся к отдельной области науки — компьютерной динамике, которая устанавливает общие закономерности движения систем при помощи различных численных методов и алгоритмов.
В сочетании с аналитическими методами, достижениями топологии, анализа, теории устойчивости и других методов компьютерная динамика применяется, главным образом, в исследовании интегрируемых задач, в частности, динамических проблем теории волчков. Такой подход позволяет получить достаточно полное представление о движении, разобраться во всем его многообразии и наглядно представить себе каждое конкретное движение и его особенности.
Помимо анализа интегрируемых ситуаций в институте начато исследование случаев хаотического поведения в динамике твердого тела. Эти исследования, которые ранее почти не проводились, основаны на широком применении высокоточного компьютерного моделирования. Ожидается, что изучение этой области динамики твердого тела позволит получить в перспективе много новых интересных результатов.
Кроме того, в институте проводятся исследования с использованием методов пуассоновой динамики и геометрии, теории групп и алгебр Ли — методов, которые во многом возникли из задач динамики твердого тела.
http://fb.ru/article/430454/uravnenie-momentov-momentyi-silyi-impulsa-i-inertsii
http://kazedu.com/referat/52905/2