Уравнение мощности для якорной цепи
Для контура «обмотка якоря — сеть», согласно второму закону Кирхгофа,
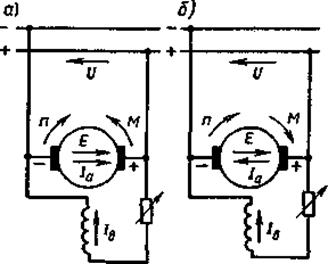
Если Е > U, то ток Iа совпадает по направлению с ЭДС Е, и машина работает в генераторном режиме (рис.а). При этом электромагнитный момент М противоположен направлению вращения п, т. е. является тормозным.
Для генераторного режима
где U∙Iа мощность в цепи обмотки якоря, Iа 2∙ ΣRа мощность электрических потерь в цепи якоря, E∙Iа электромагнитная мощность двигателя.
Но электромагнитная мощность
E∙Iа = Рэм = Мэм ∙ω
Тогда уравнение мощности
U∙Iа = Мэм ∙ω + Iа 2 ∙ΣRа,
где Мэм электромагнитный момент двигателя, ω = 2πn/60 угловая скорость вращения якоря.
С увеличением нагрузки на вал двигателя, т. е. с увеличением электромагнитного момента Мэм, возрастает мощность в цепи обмотки якоря U∙Iа. Но так как напряжение, подводимое к двигателю, поддерживается неизменным, то увеличение нагрузки двигателя сопровождается ростом тока в обмотке якоря Iа.
Частота вращения.
На основании формулы определения ЭДС
где се электрическая постоянная машины.
Пуск и реверсирование двигателя постоянного тока.
Реверсирование.
Для изменения направления вращения (для реверсирования) двигателя нужно изменить или направление магнитного потока, или направление тока в обмотке якоря; одновременное же изменение направлений потока и тока якоря не приведет к изменению направления вращения, в чем мы можем убедиться, пользуясь «правилом левой руки».
Пуск двигателя постоянного тока.
Для двигателей постоянного тока могут быть применены три способа пуска:
1) прямой, при котором обмотка якоря подключается непосредственно к сети;
2) реостатный, при котором в цепь якоря включается пусковой реостат для ограничения тока;
3) путем плавного повышения питающего напряжения, которое подается на обмотку якоря.
При пуске двигателей в ход, т. е. при включении их в сеть, необходимо последовательно с обмоткой якоря соединить добавочное сопротивление, которое называется пусковым реостатом.
Если бы не было в цепи якоря пускового реостата, то при пуске в первый момент мы получили бы ток в якоре (здесь мы пренебрегаем влиянием индуктивности цепи якоря, которая несколько уменьшает пусковой ток в начальный период)
где ΣRа — сумма всех сопротивлений внутренней цепи якоря (включая и сопротивление переходных контактов щеток). Так как сопротивление ΣRа мало, то ток в якоре получился бы во много раз больше номинального.
Для примера возьмем нормальный двигатель мощностью 10 кВт при напряжении Uн = 110 В, номинальном токе Iн = 108 А и сопротивлении ΣRа = 0,08 Ом. Начальный пусковой ток этого двигателя, если бы мы его включили в сеть без пускового реостата, был бы
Ia = U/ ΣRа = 110/0.08 = 1375, А,
т. е. превосходил бы почти в 13 раз номинальный ток.
От такого тока могли бы пострадать обмотка якоря и прежде всего коллектор и щетки. Поэтому необходимо последовательно с якорем включать добавочное сопротивление rД, чтобы пусковой ток, равный теперь
не превышал допустимого для двигателя. Так как время пуска сравнительно невелико, то пусковой ток берут несколько больше номинального, доводя его для небольших двигателей до двукратного значения номинального тока.
При пуске двигатель развивает начальный пусковой момент. Двигатель начинает вращаться; в его обмотке якоря начинает наводиться э.д.с. Ea. Применяя «правило левой руки», найдем направление вращения двигателя; применяя при этом «правило правой руки», найдем, что наведенная в якоре э.д.с. направлена против тока и, следовательно, против приложенного к двигателю напряжения. Поэтому она называется противо-э.д.с. или обратной э.д.с. Ее роль при работе машины двигателем была впервые выяснена в работах Э. X. Ленца и Б. С. Якоби.
При вращении двигателя ток в якоре определяется равенством
По мере нарастания скорости вращения и пропорциональной ей обратной э.д.с. Еа, добавочное сопротивление нужно уменьшать, т. е. выводить пусковой реостат. Выводить пусковой реостат нужно постепенно, чтобы успевали расти скорость вращения и обратная э.д.с.
Ток в якоре при нормальной работе двигателя, когда выведен весь реостат,
Реостатный пуск.
Обычно в двигателях постоянного тока падение напряжения Iном ΣRа во внутреннем сопротивлении цепи якоря составляет 5 — 10% от Uном , поэтому при прямом пуске ток якоря Iп = Uном /ΣRа = (10 ÷ 20)Iном , что создает опасность поломки якоря машины и вызывает сильное искрение под щетками. Поэтому прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление ΣRа относительно велико.
Реостатный пуск получил наибольшее применение. В начальный момент пуска при n = 0 ток Iп = U/(ΣRа + rД). Максимальное сопротивление пускового реостата rД под-бирается так, чтобы для машин большой и средней мощности ток якоря при пуске
Iп = (1,4 ÷ 1,8) Iном , а для машин малой мощности Iп = (2 ÷ 2,5) Iном .
Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением.
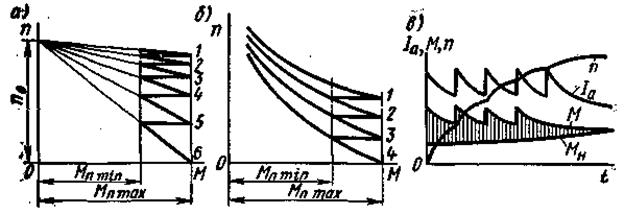
В начальный период пуск осуществляется по реостатной характеристике б (рис. а), соответствующей максимальному значению rД сопротивления пускового реостата; при этом двигатель развивает максимальный пусковой момент Мпmах . Регулировочный реостат Rр.в в этом случае выводится так, чтобы ток возбуждения Iв и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения возрастает ЭДС Е и уменьшается ток якоря Iа = (U — Eа)/(ΣRa + rД). При достижении некоторого значения Мпmin часть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает до Мпmах . При этом двигатель переходит на работу по реостатной характеристике 5 и разгоняется до значения Мпmin .
Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 6, 5, 4, 3 и 2 (см. жирные линии на рис. а) до выхода на естественную характеристику 1. Средний вращающий момент при пуске Мп.ср = 0,5 (Мпmах + Мпmin ) = const, вследствие чего двигатель разгоняется с некоторым постоянным ускорением. Таким же способом пускается в ход двигатель с последовательным возбуждением (рис.б). Количество ступеней пускового реостата зависит от требований, предъявляемых к плавности пуска (допустимой разности Мпmах — Мпmin ). Пусковые реостаты рассчитывают на кратковременную работу под током.
При выводе отдельных ступеней пускового реостата ток якоря Iа достигает некоторого максимального значения (рис. в), а затем уменьшается до минимального значения. В соответствии с изменением тока якоря изменяется и электромагнитный момент Мэм. Заштрихованная на рис. в область соответствует значениям динамического момента Мдин = Мэм — Мст, обеспечивающего разгон двигателя до установившейся частоты вращения.
Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
3.2. ЯКОРНАЯ ЦЕПЬ ДВИГАТЕЛЯ
Силовая цепь электромеханического преобразования энергии включает полупроводниковый преобразователь U, электродвигатель постоянного тока с независимым возбуждением M и промежуточную передачу механического движения рабочему органу механизма.
Полупроводниковый преобразователь в цепи якоря рассматривается как управляемый эквивалентный генератор ЭДС с внутренним активным сопротивлением и внутренней индуктивностью, не зависящими от нагрузки преобразователя. Ток нагрузки считается непрерывным; пульсирующие составляющие ЭДС и тока нагрузки преобразователя не учитываются.
Питающая сеть считается бесконечно мощной, т.е. связанные с изменением нагрузки колебания напряжения питания преобразователя отсутствуют. Двигатель постоянного тока с независимым возбуждением представляется в виде генератора противо-ЭДС с внутренним активным сопротивлением и индуктивностью, не зависящими от нагрузки. Влияние реакции якоря на возбуждение двигателя не учитывается.
Механическая часть рассматривается как абсолютно жесткая приведенная одномассовая система с постоянной величиной момента инерции. Предполагается, что момент статического сопротивления механизма содержит в общем случае реактивную и активную составляющие.
При построении математической модели силовой части приняты следующие условные обозначения параметров и сигналов :
К п – коэффициент усиления силового полупроводникового преобразователя в цепи якоря двигателя;
R я – суммарное активное сопротивление цепи якоря электропривода;
L я — суммарная индуктивность цепи якоря электропривода;
Тя = L я / R я — электромагнитная постоянная времени цепи якоря;
Тм = J R я /(CФ) 2 — электромеханическая постоянная времени электропривода;
J — суммарный момент инерции механической системы;
С — конструктивная постоянная двигателя;
Ф — магнитный поток возбуждения двигателя;
Uу — управляющий сигнал на входе преобразователя;
Еп – ЭДС полупроводникового преобразователя;
Епм – максимальная ЭДС преобразователя;
Ед – противо -ЭДС якоря двигателя;
Iя – ток якоря двигателя;
М – электромагнитный момент двигателя;
Ώ – угловая скорость вращения якоря двигателя;
θ – угол поворота вала двигателя;
Мс – момент статического сопротивления механизма;
Ма – активная составляющая момента сопротивления механизма;
Мр – модуль реактивной составляющей момента сопротивления при движении механизма;
Мтр— модуль реактивной составляющей момента сопротивления при трогании механизма.
При этих условиях и допущениях математическая модель главной цепи электропривода описывается следующими уравнениями:
Первое уравнение описывает характеристику преобразователя как безынерционного управляемого источника питания в цепи якоря двигателя. Второе – это уравнение электрического равновесия цепи якоря. Последующие уравнения описывают связи электрической части с механической и движение последней.
Отметим существенную особенность моделирования нагрузки на валу элекродвигателя. Момент статического сопротивления механизма целесообразно представить как нелинейную функцию четырех переменных
Эта функция математически может быть выражена следующим образом
Вспомогательная нелинейная функция определяет полный момент сопротивления механизма в состоянии покоя (Мс=0). Здесь же дано условие трогания в случае превышения совокупности активных состовляющих момента (т.е. способных вызвать движ
ение механизма) М и нагрузки Ма над величиной реактивного момента трогания Мтр, обусловленного силами трения и неупругой деформации.
Очень часто параметры и переменные состояния электропривода представляются в относительных единицах. Общая формула перехода к относительным единицам имеет вид:
где Х — значение физической величины (параметра, воздействия, переменной состояния и др.) в исходной системе единиц; Х6 — базисное значение, выраженное в той же исход
ной системе и принятое в качестве единицы измерения величины Х в системе относительных единиц; х – значение величины в системе относительных единиц.
За основные базисные величины для силовой части обычно принимают:
Uб = ЕЯ.Н — номинальная ЭДС якоря двигателя;
Iб=IЯН — номинальный ток якоря двигателя;
Фб = ФН — номинальный поток возбуждения;
Ώ6 = ΏН — номинальная скорость двигателя;
Мб = МН — номинальный электромагнитный момент двигателя.
Производные базисные величины:
Θ = Ώб Тб – базисный угол поворота вала двигателя.
Для регулирующей части электропривода вводится собственная система базисных величин, соизмеримых с уровнями рабочих напряжений и токов элементов регулирующей части:
U б р = U б р / I б.р – базисное сопротивление.
Уравнения модели записанные в системе относительных единиц будут иметь вид:
В приведенных уравнениях относительные переменные определяются как:
Отметим, что в дифференциальных уравнениях модели аргумент t выражен не в относительных, а в физических единицах. Это дает возможность изображать процессы в реальном времени и оперировать со следующими временными константами: ТЯ и Тj..
Первая константа представляет собой электромагнитную постоянную времени цепи якоря, а вторая – механическую постоянную времени электропривода. Эти константы характеризуют скорость протекания переходных процессов соответственно в главной цепи системы «преобразователь – двигатель» и в механической системе «электродвигатель – механизм». В частности, величина численно равна времени разгона механизма от состояния покоя до номинальной скорости под действием постоянного динамического момента, равного номинальному электромагнитному моменту двигателя.
Электромеханическая постоянная времени связана с механической постоянной времени соотношением
Структурная схема, соответствующая приведенным уравнениям показана на рис 3.1.
Рис. 3.1. Математическая модель силовой части электропривода
Представленная математическая модель характеризует силовую цель электропривода постоянного тока в общем случае как нелинейную систему с внутренней обратной связью по ЭДС. Модель приемлема для описания процессов, как при постоянном, так и при переменном возбуждении двигателя. В последнем случае она должна быть дополнена моделью цепи возбуждения.
http://electrikam.com/osnovnye-uravneniya-dvigatelya-postoyannogo-toka-dpt/
http://electrono.ru/3-2-yakornaya-cep-dvigatelya-sys_upravl_elpriv