Пункт 2. Вывод уравнения плоскости по точке и двум направляющим.
Пусть даны точка  и 2 направляющих вектора
и 2 направляющих вектора  ими однозначно порождается некоторый параллелограмм, а следовательно и плоскость. Одного направляющего вектора недостаточно, ведь тогда плоскость может вращаться вокруг него, то есть плоскость не будет однозначно фиксирована.
ими однозначно порождается некоторый параллелограмм, а следовательно и плоскость. Одного направляющего вектора недостаточно, ведь тогда плоскость может вращаться вокруг него, то есть плоскость не будет однозначно фиксирована.
Обозначим координаты направляющих, например, так:  и
и  .
.
Первый способ. Можно найти нормаль к плоскости как векторное произведение 2 направляющих векторов  и далее искать уравнение плоскости по точке и нормали, методом, рассмотренным в пункте 1. Но это будет решение в 2 шага.
и далее искать уравнение плоскости по точке и нормали, методом, рассмотренным в пункте 1. Но это будет решение в 2 шага.
Однако можно также получить уравнение плоскости сразу, без вычисления векторного произведения:
Второй способ.Возьмём произвольную точку  . Если она принадлежит плоскости, то вектор
. Если она принадлежит плоскости, то вектор  (показан красным цветом) будет лежать в плоскости, то есть тройка векторов , образует линейно-зависимую систему (ЛЗС), то есть эти векторы не образуют параллелепипед, а лежат в одной плоскости.
(показан красным цветом) будет лежать в плоскости, то есть тройка векторов , образует линейно-зависимую систему (ЛЗС), то есть эти векторы не образуют параллелепипед, а лежат в одной плоскости.
 | Тогда смешанное произведение 0, то есть определитель, составленный из них, равен 0:  |
Вычисляя этот определитель, мы получим в качестве результата некоторое уравнение, содержащее x,y,z. А если начальная точка (0,0,0), то уравнение будет вычисляться с помощью такого определителя:  .
.
Пример.Построить уравнение плоскости, проходящей через начало координат, параллельно 2 направляющим (1,2,3) и (1,1,1).
Решение.  . Можем разложить по первой строке:
. Можем разложить по первой строке:  =
=  .
.
Для удобства, чтобы 1-й коэффициент был положителен, можно домножить на  . Ответ:
. Ответ:  .
.
Замечание.Векторы  можно поменять местами, и это не влияет на уравнение плоскости. Неважно, какой из них считается первым, а какой вторым. Если все миноры сменят знак, то из уравнения просто можно будет вынести коэффициент .
можно поменять местами, и это не влияет на уравнение плоскости. Неважно, какой из них считается первым, а какой вторым. Если все миноры сменят знак, то из уравнения просто можно будет вынести коэффициент .
Замечание. Построение уравнения плоскости по трём точкам. Если дано 3 точки, достаточно взять 2 направляющих  и
и  (пусть это и будут те самые ) и затем действовать так, как сказано ранее.
(пусть это и будут те самые ) и затем действовать так, как сказано ранее.
Лекция № 7. 14. 10. 2016
Пункт 3. Расстояние от точки до плоскости.
Пусть дано уравнение плоскости  и произвольная точка
и произвольная точка  .
.
 | Возможно, она лежит в плоскости (тогда расстояние по формуле автоматически получится 0). Но в общем случае она не принадлежит плоскости. Мы не знаем, где основание перпендикуляра, более того, его и не потребуется искать. |
Возьмём произвольную точку в плоскости. Сделать это просто: присвоим какие-нибудь значения 2 переменным из трёх, и вычислим третью. Например, как правило, задать x,y и вычислить z.
Итак, выбрали какую-то точку в плоскости. Отрезок между  и
и  не перпендикулярен плоскости, но его проекция на нормаль — это как раз и есть кратчайшее расстояние до плоскости (d).
не перпендикулярен плоскости, но его проекция на нормаль — это как раз и есть кратчайшее расстояние до плоскости (d).
 =
=  =
=
 .
.
Если подставить в уравнение плоскости (в числителе) точку, лежащую в плоскости, то получим 0. В общем же случае, результат подстановки некоторой точки, не лежащей в плоскости, в уравнение плоскости, характеризует удаление от плоскости.
Пункт 4. Взаимное расположение плоскостей
Пусть даны 2 плоскости.


Если рассматривать это как систему уравнений, то видим, что 2 уравнения и 3 переменных, то есть по меньшей мере одна свободная переменная. Это означает, что если решения есть, то их бесконечно много. Это и есть все точки, принадлежащие прямой, являющейся пересечением плоскостей.
Чтобы найти пересечение, достаточно решить систему уравнений, где 2 уравнения — это и есть уравнения этих плоскостей.
Если  то плоскости совпадают, так как уравнения полностью пропорциональны.
то плоскости совпадают, так как уравнения полностью пропорциональны.
Если  то плоскости параллельны. Дело в том, что если из одного уравнения вычесть кратное второму, то получим все 0 коэффициенты при x, y, z, и останется противоречивое уравнение (некая ненулевая константа = 0).
то плоскости параллельны. Дело в том, что если из одного уравнения вычесть кратное второму, то получим все 0 коэффициенты при x, y, z, и останется противоречивое уравнение (некая ненулевая константа = 0).
Если пропорциональность нарушена среди каких-то из первых 3 дробей, то плоскости пересекаются по прямой.
Пункт 5. Угол между плоскостями и метод его нахождения.
 | Можно искать как угол между нормалями  (показаны красным). Их координаты известны — это (показаны красным). Их координаты известны — это  и и  . В то же время известно, что . В то же время известно, что  . Тогда . Тогда  = =  . .  . . |
Прямая в пространстве.
Для прямой на плоскости и для плоскости в пространстве есть однозначно определённое направление нормали (перпендикуляра) т.к. там размерности рассматриваемых многообразий 1 и 2 (2 и 3 соответственно), то есть «не хватает» одной размерности. А для прямой в пространстве не хватает 2 размерностей (1 и 3). Это совершенно новый случай, здесь нельзя однозначно задать перпендикуляр. Есть целая плоскость, перпендикулярная прямой, то есть бесконечное число нормалей. А вот направляющий вектор однозначно определён (с точность до его длины, конечно). Это проявится в том, что мы получим другой тип уравнений.
75. Различные уравнения плоскости
Пусть в пространстве R 3 Задана прямоугольная система координат Oxyz.
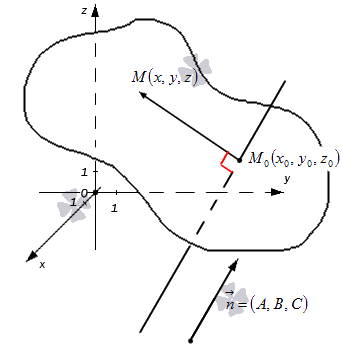
Определение 1. Нормальным вектором плоскости A называется любой ненулевой вектор N Перпендикулярный плоскости A.
Пусть N = (A,B,C) ≠ 0, — нормальный вектор плоскости a, M0(X0,Y0,Z0)- точка, принадлежащая плоскости a. Пусть M(X,Y,Z), произвольная точка пространства,

 .
.
Тогда точка M принадлежит плоскости a тогда и только тогда, когда векторы  и N Ортогональны. Два вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю, Последнее в ортонормированном базисе можно записать в виде:
и N Ортогональны. Два вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю, Последнее в ортонормированном базисе можно записать в виде:
Таким образом, получаем уравнение плоскости, Проходящей через точку и перпендикулярной вектору N = (A,B,C) ≠ 0.
Рассмотрим произвольное уравнение первого порядка
Где коэффициенты одновременно не равны нулю, т. е. A2+ B2+ C2 ≠ 0.
Теорема 1. Любую плоскость в произвольной аффинной системе координат можно задать уравнением (1) первого порядка и обратно любое уравнение (1) первого порядка в аффинной системе координат определяет плоскость.
Доказательство. Достаточно доказать теорему для прямоугольной системы координат. Любую плоскость в прямоугольной системе координат можно задать ее нормальным вектором N = (A,B,C) ≠ 0 И точкой M0(X0,Y0,Z0), принадлежащей плоскости. Уравнение этой плоскости выведено в §2.2 и имеет вид:
Где D = —Ax0 — By0 — Cz0. Так (A,B,C) ≠ 0, то A2+ B2+ C2 ≠ 0 и любая плоскость есть поверхность первого порядка.
Обратно, пусть некоторая поверхность в пространстве определена уравнением (1). Так как не все коэффициенты равны нулю, то уравнение (1) имеет решение (X0,Y0,Z0). Тогда
И точка M0(X0,Y0,Z0) принадлежит поверхности. Вычитая почленно из уравнения (1) равенство (2), получим уравнение
Равносильное уравнению (1). Это уравнение в силу §2.2, определяет плоскость, проходящую через точку M0(X0,Y0,Z0), перпендикулярную вектору N = (A,B,C).

Определение 2. Направляющими векторами плоскости A называется пара неколлинеарных векторов S1 И S2 Параллельных плоскости A.
Пусть S1 = (M1,K1,L1), S2 = (M2,K2,L2) — направляющие вектора плоскости a, M0(X0,Y0,Z0)- точка, принадлежащая плоскости a. Пусть M(X,Y,Z), произвольная точка пространства,
 .
.
Тогда точка M принадлежит плоскости a тогда и только тогда, когда векторы , S1 и S2 компланарны. Три вектора компланарны тогда и только тогда, когда определитель, составленный из координат этих векторов равен нулю. Таким образом, получаем уравнение плоскости по Двум направляющим векторам и точке, принадлежащей плоскости
 . (4)
. (4)
Пример 1. Найдем уравнение плоскости с направляющими векторами S1 = (B,—A,0), S2 = (C,0,—A), где A ≠ 0. Так как векторы S1 и S2 неколлинеарны, то формуле (4) находим уравнение этой плоскости:
 .
.
 .
.
Сократим на A ≠ 0 и получаем уравнение
 . (5)
. (5)
Рассмотрим радиус вектора RO =  и R =
и R = . Точка M принадлежит плоскости a тогда и только тогда, когда векторы = R — RO, S1 и S2 компланарны. Так как векторы S1 и S2 неколлинеарны, то последнее равносильно тому, что вектор R — RO линейная комбинация векторов S1 и S2, т. е. R — RO = US1 +VS2, где U, V — действительные числа.
. Точка M принадлежит плоскости a тогда и только тогда, когда векторы = R — RO, S1 и S2 компланарны. Так как векторы S1 и S2 неколлинеарны, то последнее равносильно тому, что вектор R — RO линейная комбинация векторов S1 и S2, т. е. R — RO = US1 +VS2, где U, V — действительные числа.
Отсюда получаем так называемое Векторно-параметрическое уравнение Плоскости.
Где U, V — произвольные действительные параметры.
Так как R == (X,Y,Z), RO = = (X0,Y0,Z0), то запишем это уравнение в координатной форме. Получим Параметрические уравнения плоскости:

 (7)
(7)
Где U, V — произвольные действительные параметры, S1 = (M1,K1,L1), S1 = (M2,K2,L2) — направляющие вектора плоскости, M0(X0,Y0,Z0)- точка, принадлежащая плоскости.
Пусть даны три точки M1(X1,Y1,Z1), M2(X2,Y2,Z2), M3(X3,Y3,Z3) плоскости, которые не принадлежат одной прямой. Тогда векторы  ,
, 
являются направляющими векторами плоскости a. Применяя формулу (4) получим Уравнение плоскости, проходящей через три данные точки:
 . (8)
. (8)
Пусть плоскость не проходит через начало координат и пересекает оси Ox, Oy, Oz Соответственно в точках M1(A,0,0), M2(0,B,0), M3(0,0,c). По формулу (8) находим уравнение плоскости, проходящей через эти три точки
 .
.
Вычислим этот определитель и преобразуем полученное уравнение к более простому виду

 . (9)
. (9)
Уравнение (5) называется Уравнением плоскости в отрезках на осях.
.Замечание 1. Уравнение (1) называется Общим уравнением плоскости. Если плоскость a задается общим уравнением (1) в прямоугольной системе координат, то N = (A,B,C) — нормальный вектор плоскости a.
Если плоскость a задается общим уравнением (1) в произвольной аффинной системе координат и A ≠ 0, то S1 = (B,—A,0), S2 = (C,0,—A) направляющие вектора плоскости a.
Рассмотрим Частные случаи уравнения (1).
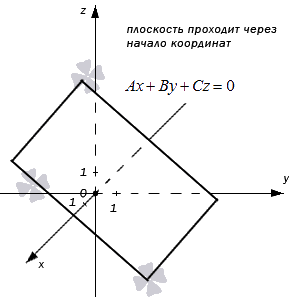
1. Пусть D = 0. Тогда уравнение (1) принимает вид: Ax + By + Cz = 0 и плоскость, определяемая этим уравнением, проходит через начало координат (см. Рис. 6).
2. Пусть С = 0, A ≠ 0. Тогда уравнение (1) принимает вид: Ax + By + D = 0. Рассмотрим направляющие вектора S1 = (B,—A,0) и S2 = (0,0,—A) этой плоскости. Так как базисный вектор Е3 = (0,0,1) оси Oz. коллинеарен вектору S2, то плоскость a, определяемая этим уравнением, параллельна оси Oz (см. Рис. 7).
3. Пусть B=0, С = 0, A ≠ 0. Тогда уравнение (1) принимает вид: Ax + D = 0. Рассмотрим направляющие вектора S1 = (0,—A,0) и S2 = (0,0,—A) этой плоскости. Так как базисные векторы е2 = (0,1,0), Е3 = (0,0,1) .коллинеарны соответственно векторам вектору S1, S2, то плоскость a, определяемая этим уравнением, параллельна координатной плоскости Ozy (см. Рис. 8).
Общее уравнение плоскости : описание, примеры, решение задач
В статье рассмотрим такой тип уравнений плоскости как общее уравнение, получим его вид и разберем на практических примерах. Рассмотрим частные случаи и понятие общего неполного уравнения плоскости.
Общее уравнение плоскости: основные сведения
Перед началом разбора темы вспомним, что такое уравнение плоскости в прямоугольной системе координат в трёхмерном пространстве. Пусть нам дана прямоугольная система координат O x y z в трехмерном пространстве, уравнением плоскости в заданной системе координат будет такое уравнение с тремя неизвестными x , y , и z , которому отвечали бы координаты всех точек этой плоскости и не отвечали бы координаты никаких прочих точек. Иначе говоря, подставив в уравнение плоскости координаты некоторой точки этой плоскости, получаем тождество. Если же в уравнение подставить координаты какой-то другой точки, не принадлежащей заданной плоскости, равенство станет неверным.
Также вспомним определение прямой, перпендикулярной к плоскости: прямая является перпендикулярной к заданной плоскости, если она перпендикулярна любой прямой, принадлежащей этой плоскости.
Любую плоскость, заданную в прямоугольной системе координат O x y z трехмерного пространства, можно определить уравнением A x + B y + C z + D = 0 . В свою очередь, любое уравнение A x + B y + C z + D = 0 определяет некоторую плоскость в данной прямоугольной системе координат трехмерного пространства. A , B , C , D – некоторые действительные числа, и числа A , B , C не равны одновременно нулю.
Теорема состоит из двух частей. Разберем доказательство каждой из них.
- Первая часть теоремы гласит, что любую заданную плоскость возможно описать уравнением вида A x + B y + C z + D = 0 . Допустим, задана некоторая плоскость и точка M 0 ( x 0 , y 0 , z 0 ) , через которую эта плоскость проходит. Нормальным вектором этой плоскости является n → = ( A , B , C ) . Приведем доказательство, что указанную плоскость в прямоугольной системе координат O x y z задает уравнение A x + B y + C z + D = 0 .
Возьмем произвольную точку заданной плоскости M ( x , y , z ) .В таком случае векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) будут перпендикулярны друг другу, а значит их скалярное произведение равно нулю:
n → , M 0 M → = A x — x 0 + B ( y — y 0 ) + C ( z — z 0 ) = A x + B y + C z — ( A x 0 + B y 0 + C z 0 )
Примем D = — ( A x 0 + B y 0 + C z 0 ) , тогда уравнение преобразуется в следующий вид: A x + B y + C z + D = 0 . Оно и будет задавать исходную плоскость. Первая часть теоремы доказана.
- Во второй части теоремы утверждается, что любое уравнение вида A x + B y + C z + D = 0 задает некоторую плоскость в прямоугольной системе координат O x y z трехмерного пространства. Докажем это.
В теореме также указано, что действительные числа А , B , C одновременно не являются равными нулю. Тогда существует некоторая точка M 0 ( x 0 , y 0 , z 0 ) , координаты которой отвечают уравнению A x + B y + C z + D = 0 , т.е. верным будет равенство A x 0 + B y 0 + C z 0 + D = 0 . Отнимем левую и правую части этого равенства от левой и правой частей уравнения A x + B y + C z + D = 0 . Получим уравнение вида
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 , и оно эквивалентно уравнению A x + B y + C z + D = 0 . Докажем, что уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает некоторую плоскость.
Уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 являет собой условие, необходимое и достаточное для перпендикулярности векторов n → = ( A , B , C ) и M 0 M → = x — x 0 , y — y 0 , z — z 0 . Опираясь на утверждение, указанное перед теоремой, возможно утверждать, что при справедливом равенстве A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 множество точек M ( x , y , z ) задает плоскость, у которой нормальный вектор n → = ( A , B , C ) . При этом плоскость проходит через точку M ( x 0 , y 0 , z 0 ) . Иначе говоря, уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает в прямоугольной системе координат O x y z трехмерного пространства некоторую плоскость. Таким, образом, эквивалентное этому уравнению уравнение A x + B y + C z + D = 0 также определяет эту плоскость. Теорема доказана полностью.
Уравнение вида A x + B y + C z + D = 0 называют общим уравнением плоскости в прямоугольной системе координат O x y z трехмерного пространства.
Допустим, задано некоторое общее уравнение плоскости λ · A x + λ · B y + λ · C z + λ · D = 0 , где λ – некое действительное число, не равное нулю. Это уравнение также задает в прямоугольной системе координат некоторую плоскость, совпадающую с плоскостью, определяемую уравнением A x + B y + C z + D = 0 , поскольку описывает то же самое множество точек трехмерного пространства. Например, уравнения x — 2 · y + 3 · z — 7 = 0 и — 2 · x + 4 · y — 2 3 · z + 14 = 0 задают одну и ту же плоскость, поскольку им обоим отвечают координаты одних и тех же точек трехмерного пространства.
Раскроем чуть шире смысл теорем.
В пределах заданной системы координат плоскость и общее уравнение, ее определяющее, неразрывно связаны: каждой плоскости отвечает общее уравнение плоскости вида A x + B y + C z + D = 0 ( при конкретных значениях чисел A , B , C , D ). В свою очередь, этому уравнению отвечает заданная плоскость в заданной прямоугольной системе координат.
Укажем пример как иллюстрацию этих утверждений.
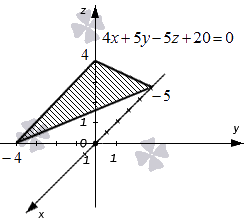
Ниже приведен чертеж, на котором изображена плоскость в фиксированной прямоугольной системе координат трехмерного пространства. Заданной плоскости отвечает общее уравнение вида 4 x + 5 y – 5 z + 20 = 0 , и ему соответствуют координаты любой точки этой плоскости. В свою очередь, уравнение 4 x + 5 y – 5 z + 20 = 0 описывает в заданной системе координат множество точек, которые составляют изображенную плоскость.
Общее уравнение плоскости, проходящей через точку
Повторимся: точка M 0 ( x 0 , y 0 , z 0 ) лежит на плоскости, заданной в прямоугольной системе координат трехмерного пространства уравнением A x + B y + C z + D = 0 в том случае, когда подставив координаты точки M 0 ( x 0 , y 0 , z 0 ) в уравнение A x + B y + C z + D = 0 , мы получим тождество.
Заданы точки M 0 ( 1 , — 1 , — 3 ) и N 0 ( 0 , 2 , — 8 ) и плоскость, определяемая уравнением 2 x + 3 y — z — 2 = 0 . Необходимо проверить, принадлежат ли заданные точки заданной плоскости.
Решение
Подставим координаты точки М 0 в исходной уравнение плоскости:
2 · 1 + 3 · ( — 1 ) — ( — 3 ) — 2 = 0 ⇔ 0 = 0
Мы видим, что получено верное равенство, значит точка M 0 ( 1 , — 1 , — 3 ) принадлежит заданной плоскости.
Аналогично проверим точку N 0 . Подставим ее координаты в исходное уравнение:
2 · 0 + 3 · 2 — ( — 8 ) — 2 = 0 ⇔ 12 = 0
Равенство неверно. Таким, образом, точка N 0 ( 0 , 2 , — 8 ) не принадлежит заданной плоскости.
Ответ: точка М 0 принадлежит заданной плоскости; точка N 0 – не принадлежит.
Приведенное выше доказательство теоремы об общем уравнении дает нам возможность использовать важный факт: вектор n → = ( A , B , C ) — нормальный вектор для плоскости, определяемой уравнением A x + B y + C z + D = 0 . Так, если нам известен вид общего уравнения, то возможно записать координаты нормального вектора заданной плоскости.
В прямоугольной системе координат задана плоскость 2 x + 3 y — z + 5 = 0 . Необходимо записать координаты всех нормальных векторов заданной плоскости.
Решение
Мы знаем, что заданные общим уравнением коэффициенты при переменных x , y , z служат координатами нормального вектора заданной плоскости. Тогда, нормальный вектор n → исходной плоскости имеет координаты 2 , 3 , — 1 . В свою очередь, множество нормальных векторов запишем так:
λ · n → = λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Ответ: λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Разберем обратную задачу, когда требуется составить уравнение плоскости по заданным координатам нормального вектора.
Очевидным фактом является то, что нормальный вектор n → = ( A , B , C ) является нормальным вектором бесконечного множества параллельных плоскостей. Поэтому для обозначения конкретной плоскости введем дополнительное условие: зададим некоторую точку M 0 ( x 0 , y 0 , z 0 ) , принадлежащую плоскости. Так, задавая в условии нормальный вектор и некоторую точку плоскости, мы ее зафиксировали.
Общее уравнение плоскости с нормальным вектором n → = ( A , B , C ) будет выглядеть так: A x + B y + C z + D = 0 . По условию задачи точка M 0 ( x 0 , y 0 , z 0 ) принадлежит заданной плоскости, т.е. ее координаты отвечают уравнению плоскости, а значит верно равенство: A x 0 + B y 0 + C z 0 + D = 0
Вычитая соответственно правые и левые части исходного уравнения и уравнения A x 0 + B y 0 + C z 0 + D = 0 , получим уравнение вида A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 . Оно и будет уравнением плоскости, проходящей через точку M 0 ( x 0 , y 0 , z 0 ) и имеющей нормальный вектор n → = ( A , B , C ) .
Возможно получить это уравнение другим способом.
Очевидным фактом является то, что все точки М ( x , y , z ) трехмерного пространства задают данную плоскость тогда и только тогда, когда векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) перпендикулярны или, иначе говоря, когда скалярное произведение этих векторов равно нулю:
n → , M 0 M → = A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
Задана точка М 0 ( — 1 , 2 , — 3 ) , через которую в прямоугольной системе координат проходит плоскость, а также задан нормальный вектор этой плоскости n → = ( 3 , 7 , — 5 ) . Необходимо записать уравнение заданной плоскости.
Решение
Рассмотрим два способа решения.
- Исходные условия позволяют получить следующие данные:
x 0 = — 1 , y 0 = 2 , z 0 = — 3 , A = 3 , B = 7 , C = — 5
Подставим их в общее уравнение плоскости, проходящей через точку, т.е. в A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
3 ( x — ( — 1 ) ) + 7 ( y — 2 ) — 5 ( z — ( — 3 ) ) = 0 ⇔ 3 x + 7 y — 5 z — 26 = 0
- Допустим, М ( x , y , z ) – некоторая точки заданной плоскости. Определим координаты вектора M 0 M → по координатам точек начала и конца:
M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) = ( x + 1 , y — 2 , z + 3 )
Чтобы получить искомое общее уравнение плоскости, необходимо также воспользоваться необходимым и достаточным условием перпендикулярности векторов и тогда:
n → , M 0 M → = 0 ⇔ 3 ( x + 1 ) + 7 ( y — 2 ) — 5 ( z + 3 ) = 0 ⇔ ⇔ 3 x + 7 y — 5 z — 26 = 0
Ответ: 3 x + 7 y — 5 z — 26 = 0
Неполное общее уравнение плоскости
Выше мы говорили о том, что, когда все числа А , B , C , D отличны от нуля, общее уравнение плоскости A x + B y + C z + D = 0 называют полным. В ином случае общее уравнение плоскости является неполным.
Разберем все возможные варианты общих неполных уравнений в прямоугольной системе координат трехмерного пространства.
- В случае, когда D = 0 , мы получаем общее неполное уравнение плоскости: A x + B y + C z + D = 0 ⇔ A x + B y + C z = 0
Такая плоскость в прямоугольной системе координат проходит через начало координат. В самом деле, если подставим в полученное неполное уравнение плоскости координаты точки О ( 0 , 0 , 0 ) , то придем к тождеству:
A · 0 + B · 0 + C · 0 = 0 ⇔ 0 ≡ 0
- Если А = 0 , В ≠ 0 , С ≠ 0 , или А ≠ 0 , В = 0 , С ≠ 0 , или А ≠ 0 , В ≠ 0 , С = 0 , то общие уравнения плоскостей имеют вид соответственно: B y + C z + D = 0 , или A x + C z + D = 0 , или A x + B y + D = 0 . Такие плоскости параллельны координатным осям О x , O y , O z соответственно. Когда D = 0 , плоскости проходят через эти координатные оси соответственно. Также заметим, что неполные общие уравнения плоскостей B y + C z + D = 0 , A x + C z + D = 0 и A x + B y + D = 0 задают плоскости, которые перпендикулярны плоскостям O y z , O x z , O z y соответственно.
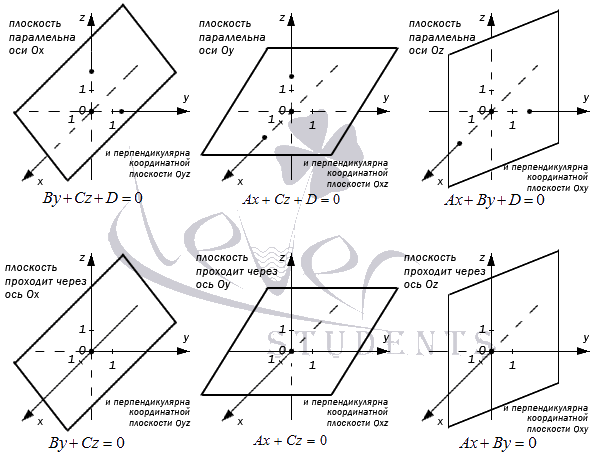
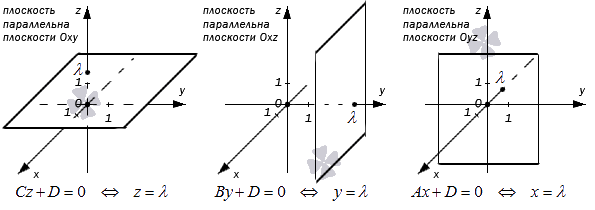
- При А = 0 , В = 0 , С ≠ 0 , или А = 0 , В ≠ 0 , С = 0 , или А ≠ 0 , В = 0 , С = 0 получим общие неполные уравнения плоскостей: C z + D = 0 ⇔ z + D C = 0 ⇔ z = — D C ⇔ z = λ , λ ∈ R или B y + D = 0 ⇔ y + D B = 0 ⇔ y = — D B ⇔ y = λ , λ ∈ R или A x + D = 0 ⇔ x + D A = 0 ⇔ x = — D A ⇔ x = λ , λ ∈ R соответственно.
Эти уравнения определяют плоскости, которые параллельны координатным плоскостям O x y , O x z , O y z соответственно и проходят через точки 0 , 0 , — D C , 0 , — D B , 0 и — D A , 0 , 0 соответственно. При D = 0 уравнения самих координатных плоскостей O x y , O x z , O y z выглядят так: z = 0 , y = 0 , x = 0
Задана плоскость, параллельная координатной плоскости O y z и проходящая через точку М 0 ( 7 , — 2 , 3 ) . Необходимо составить общее уравнение заданной плоскости.
Решение
Условием задачи определено, что заданная плоскость параллельна координатной плоскости O y z , а, следовательно, может быть задана общим неполным уравнением плоскости A x + D = 0 , A ≠ 0 ⇔ x + D A = 0 . Поскольку точка M 0 ( 7 , — 2 , 3 ) лежит на плоскости по условию задачи, то очевидно, что координаты этой точки должны отвечать уравнению плоскости x + D A = 0 , иначе говоря, должно быть верным равенство 7 + D A = 0 . Преобразуем: D A = — 7 , тогда требуемое уравнение имеет вид: x — 7 = 0 .
Задачу возможно решить еще одним способом.
Вновь обратим внимание на заданную условием задачи параллельность данной плоскости координатной плоскости O y z . Из этого условия понятно, что возможно в качестве нормального вектора заданной плоскости использовать нормальный вектор плоскости O y z : i → = ( 1 , 0 , 0 ) . Так, нам известны и точка, принадлежащая плоскости (задана условием задачи) и ее нормальный вектор. Таким образом, становится возможно записать общее уравнение заданной плоскости:
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 ⇔ ⇔ 1 · ( x — 7 ) + 0 · ( y + 2 ) + 0 · ( z — 3 ) = 0 ⇔ ⇔ x — 7 = 0
Ответ: x — 7 = 0
Задана плоскость, перпендикулярная плоскости O x y и проходящая через начало координат и точку М 0 ( — 3 , 1 , 2 ) .
Решение
Плоскость, которая перпендикулярна координатной плоскости O x y определяется общим неполным уравнением плоскости A x + B y + D = 0 ( А ≠ 0 , В ≠ 0 ) . Условием задачи дано, что плоскость проходит через начало координат, тогда D = 0 и уравнение плоскости принимает вид A x + B y = 0 ⇔ x + B A y = 0 .
Найдем значение B A . В исходных данных фигурирует точка М 0 ( — 3 , 1 , 2 ) , координаты которой должны отвечать уравнению плоскости. Подставим координаты, получим верное равенство: — 3 + B A · 1 = 0 , откуда определяем B A = 3 .
Так, мы имеем все данные, чтобы записать требуемое общее уравнение плоскости: x + 3 y = 0 .
http://matica.org.ua/metodichki-i-knigi-po-matematike/algebra-i-geometriia-tolstikov-a-v/75-razlichnye-uravneniia-ploskosti
http://zaochnik.com/spravochnik/matematika/prjamaja-ploskost/obschee-uravnenie-ploskosti/