Уравнение плоскости, виды уравнения плоскости
В предыдущем разделе, посвященном плоскости в пространстве, мы рассмотрели вопрос с позиции геометрии. Теперь же перейдем к описанию плоскости с помощью уравнений. Взгляд на плоскость со стороны алгебры предполагает рассмотрение основных видов уравнения плоскости в прямоугольной системе координат O х у z трехмерного пространства.
Определение уравнения плоскости
Плоскость – это геометрическая фигура, состоящая из отдельных точек. Каждой точке в трехмерном пространстве соответствуют координаты, которые задаются тремя числами. Уравнение плоскости устанавливает зависимость между координатами всех точек.
Уравнение плоскости в прямоугольной системе координат 0хуz имеет вид уравнения с тремя переменными х , у и z . Удовлетворяют уравнению координаты любой точки, лежащей в пределах заданной плоскости, не удовлетворяют координаты любых других точек, которые лежат вне заданной плоскости.
Подстановка в уравнение плоскости координат точки данной плоскости, обращает уравнение в тождество. При подстановке координат точки, лежащей вне плоскости, уравнение превращается в неверное равенство.
Уравнение плоскости может иметь несколько видов. В зависимости от специфики решаемых задач уравнение плоскости может быть записано по-разному.
Общее уравнение плоскости
Сформулируем теорему, а затем запишем уравнение плоскости.
Всякая плоскость в прямоугольной системе координат O x y z в трехмерном пространстве может быть задана уравнением вида A x + B y + C z + D = 0 , где А , В , С и D – некоторые действительные числа, которые одновременно не равны нулю. Всякое уравнение, имеющее вид A x + B y + C z + D = 0 , определяет плоскость в трехмерном пространстве
Уравнение, имеющее вид A x + B y + C z + D = 0 носит название общего уравнения плоскости. Если не придавать числам А , В , С и D конкретных значений, то мы получаем уравнение плоскости в общем виде.
Важно понимать, что уравнение λ · A x + λ · B y + λ · C z + λ · D = 0 , будет точно так же определять плоскость. В уравнении λ — это некоторое отличное от нуля действительное число. Это значит, что равенства A x + B y + C z + D = 0 и λ · A x + λ · B y + λ · C z + λ · D = 0 равнозначны.
Общим уравнениям плоскости x — 2 · y + 3 · z — 7 = 0 и — 2 · x + 4 · y — 2 3 · z + 14 = 0 удовлетворяют координаты одних и тех же точек, расположенных в трехмерном пространстве. Это значит, что они задают одну и ту же плоскость.
Дадим пояснения к рассмотренной выше теореме. Плоскость и ее уравнение неразделимы, так как каждому уравнению A x + B y + C z + D = 0 соответствует плоскость в заданной прямоугольной системе координат, а каждой плоскости, расположенной в трехмерном пространстве, соответствует ее уравнение вида A x + B y + C z + D = 0 .
Уравнение плоскости A x + B y + C z + D = 0 может быть полным и неполным. Все коэффициенты А , B , С и D в полном уравнении отличны от нуля. В противном случае, общее уравнение плоскости считается неполным.
Плоскости, которые задаются неполными уравнениями, могут быть параллельны координатным осям, проходить через оси координат, совпадать с координатными плоскостями или располагаться параллельно им, проходить через начало координат.
Рассмотрим положение в пространстве плоскости, заданной уравнением 4 · y — 5 · z + 1 = 0 .
Она параллельна оси абсцисс и располагается перпендикулярно по отношению к плоскости O y z . Уравнение z = 0 определяет координатную плоскость O y z , а общее уравнение плоскости вида 3 · x — y + 2 · z = 0 соответствует плоскости, которая проходит через начало координат.
Важное уточнение: коэффициенты А , В и С в общем уравнении плоскости представляют собой координаты нормального вектора плоскости.
Когда говорят об уравнении плоскости, то подразумевают общее уравнение плоскости. Все виды уравнений плоскости, которые мы разберем в следующем разделе статьи, получают из общего уравнения плоскости.
Нормальное уравнение плоскости
Нормальное уравнение плоскости – это общее уравнение плоскости вида A x + B y + C z + D = 0 , которое удовлетворяет следующим условиям: длина вектора n → = ( A , B , C ) равна единице, т.е. n → = A 2 + B 2 + C 2 = 1 , а D ≤ 0 .
Также запись нормального уравнения плоскости может иметь следующий вид cos α · x + cos β · y + cos γ · z — p = 0 , где p – это неотрицательное число, которое равно расстоянию от начала координат до плоскости, а cos α , cos β , cos γ — это направляющие косинусы нормального вектора данной плоскости единичной длины.
n → = ( cos α , cos β , cos γ ) , n → = cos 2 α + cos 2 β + cos 2 γ = 1
То есть, согласно нормальному уравнению плоскости, плоскость в прямоугольной системе координат O х у z удалена от начала координат на расстояние p в положительном направлении нормального вектора этой плоскости n → = ( cos α , cos β , cos γ ) . Если p равно нулю, то плоскость проходит через начало координат.
Плоскость задана общим уравнением плоскости вида — 1 4 · x — 3 4 · y + 6 4 · z — 7 = 0 . D = — 7 ≤ 0 , нормальный вектор этой плоскости n → = — 1 4 , — 3 4 , 6 4 имеет длину, равную единице, так как n → = — 1 4 2 + — 3 4 2 + 6 4 = 1 . Соответственно, это общее уравнение плоскости является нормальным уравнением плоскости.
Для более детального изучения нормального уравнения плоскости мы рекомендуем перейти в соответствующий раздел. В теме приведены разборы задач и характерные примеры, а также способы приведения общего уравнения плоскости к нормальному виду.
Уравнение плоскости в отрезках
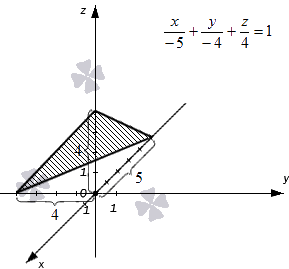
Плоскость отсекает на координатных осях O х , O у и O z отрезки определенной длины. Длины отрезков задаются отличными от нуля действительными числами a , b и с . Уравнение плоскости в отрезках имеет вид x a + y b + z c = 1 . Знак чисел а , b и с показывает, в каком направлении от нулевого значения следует откладывать отрезки на координатных осях.
Построим в прямоугольной системе координат плоскость, которая задана уравнением формулы плоскости в отрезках x — 5 + y — 4 + z 4 = 1 .
Точки удалены от начала координат в отрицательном направлении на 5 единиц по оси абсцисс, на 4 единицы в отрицательном направлении по оси ординат и на 4 единицы в положительном направлении по оси аппликат. Отмечаем точки и соединяем их прямыми линиями.
Плоскость полученного треугольника является плоскостью, соответствующей уравнению плоскости в отрезках, имеющего вид x — 5 + y — 4 + z 4 = 1 .
Более подробно информация об уравнении плоскости в отрезках, приведении уравнения плоскости в отрезках к общему уравнению плоскости размещена в отдельной статье. Там же приведен ряд решений задач и примеров по теме.
Геометрия. 11 класс
Конспект урока
Геометрия, 11 класс
Урок №5. Метод преобразований решения задач
Перечень вопросов, рассматриваемых в теме:
- симметрия относительно произвольной плоскости;
- понятие «метод движений» в пространстве.
Глоссарий по теме
Метод геометрических преобразований
Сущность метода геометрических преобразований при решении геометрических задач заключается в привлечении того или иного геометрического преобразования, опираясь на свойства которого, задача может быть решена.
Метод параллельного переноса
Сущность этого метода состоит в том, что наряду с данными и искомыми фигурами рассматриваются некоторые другие фигуры, которые получаются из данных или искомых фигур или их частей путём переноса на некоторый вектор.
Применение симметрии к решению задач на построение называют методом симметрии. Метод симметрии состоит в том, что наряду с данными и искомыми фигурами рассматриваются также фигуры, симметричные некоторым из них относительно некоторой точки/оси/плоскости.
Идея метода поворота состоит в том, чтобы повернуть какую-либо данную или искомую фигуру около целесообразно избранного центра/оси на соответствующий угол так, чтобы облегчить проведение анализа задачи или даже непосредственно прийти к решению.
Атанасян Л. С., Бутузов В. Ф., Кадомцев С. Б. и др. Геометрия. 10–11 классы: учеб. для общеобразоват. организаций: базовый и углубл. уровни – М.: Просвещение, 2014. – 255, сс. 121-126.
Шарыгин И.Ф., Геометрия. 10–11 кл.: учеб. для общеобразоват. учреждений /– М.: Дрофа, 2009. – 235,: ил., ISBN 978–5–358–05346–5, сс. 178-196. Потоскуев Е.В., Звавич Л. И. Геометрия. 11кл.: учеб. Для классов с углубл. И профильным изучением математики общеобразоват. учреждений– М.: Дрофа, 2004. – 368 с.: ил., ISBN 5–7107–8310–2, сс. 5-30.
Открытые электронные ресурсы:
Теоретический материал для самостоятельного изучения
1. Метод геометрических преобразований
Сущность метода геометрических преобразований при решении геометрических задач заключается в привлечении того или иного геометрического преобразования, опираясь на свойства которого, задача может быть решена.
1.1. Метод параллельного переноса.
Сущность этого метода состоит в том, что наряду с данными и искомыми фигурами рассматриваются некоторые другие фигуры, которые получаются из данных или искомых фигур или их частей путём переноса на некоторый вектор.
Этим путём иногда удаётся облегчить проведение анализа. Метод параллельного переноса применяют главным образом для объединения разрозненных частей фигур, когда часто построение фигуры становится затруднительным только от того, что части этой фигуры слишком удалены друг от друга, и потому трудно ввести в чертёж данные. В этих случаях какую-нибудь часть искомой фигуры переносят параллельно самой себе на такое расстояние, чтобы вновь полученная фигура могла быть построена или непосредственно, или легче, чем искомая фигура. Направление такого переноса зависит от условий задачи и должно быть выбрано так, чтобы во вновь полученную фигуру вошло, по возможности, большое количество данных.
1.2. Метод симметрии.
Применение осевой симметрии к решению задач на построение называют методом симметрии. Метод симметрии состоит в том, что наряду с данными и искомыми фигурами рассматриваются также фигуры, симметричные некоторым из них относительно некоторой оси. При удачном выборе оси и преобразуемой фигуры решение задачи может значительно облегчиться, а в некоторых случаях симметрия непосредственно даёт искомые точки.
Метод симметрии заключается в следующем. Предполагают задачу решённой и одну из данных точек (прямую или окружность) отражают в какой-нибудь известной оси; иногда эта ось проходит через известную точку. Тогда полученную симметричную точку (прямую или окружность) подчиняют тем же условиям, которым должна была удовлетворять заменённая точка (прямая или окружность). После этого получится новая задача, которую решают способами, уже нам известными. Обыкновенно, с решением этой новой задачи предложенная задача уже будет решена сама собой, и только в редких случаях придётся ещё переходить к первоначальным условиям задачи. Таким образом, метод симметрии приводит решение предложенной задачи к решению новой задачи.
1.3. Метод поворота.
Поворотом также пользуются как методом решения геометрических задач на построение. Идея метода вращения состоит в том, чтобы повернуть какую-либо данную или искомую фигуру около целесообразно избранного центра/оси на соответствующий угол так, чтобы облегчить проведение анализа задачи или даже непосредственно прийти к решению.
2. Решение задач методом преобразований
2.1. Симметрия относительно произвольной плоскости
Постановка задачи. Найти координаты точки  , симметричной точке
, симметричной точке  , относительно плоскости Ax + By + Cz + D = 0.
, относительно плоскости Ax + By + Cz + D = 0.
1. Находим уравнение прямой, которая перпендикулярна данной плоскости и проходит через точку  . Так как прямая перпендикулярна заданной плоскости, то в качестве ее направляющего вектора можно взять вектор нормали плоскости, т.е.
. Так как прямая перпендикулярна заданной плоскости, то в качестве ее направляющего вектора можно взять вектор нормали плоскости, т.е.  .
.
Поэтому уравнение прямой будет: 
2. Находим точку  пересечения прямой
пересечения прямой  и плоскости Ax + By + Cz + D = 0.
и плоскости Ax + By + Cz + D = 0.
Для этого обозначим  и выразим x, y, z:
и выразим x, y, z:
 .
.
Подставим x, y, z в уравнение плоскости:
 найдем значение t.
найдем значение t.
Затем найдем x, y, z. Найденные координаты будут являться координатами точки  .
.
3. Точка  является серединой отрезка
является серединой отрезка  , где точка
, где точка  является точкой симметричной точке
является точкой симметричной точке  , поэтому
, поэтому
 ,
,  ,
,  .
.
Задача 1. Найти точку M’, симметричную точке M относительно плоскости.
M(1, 1, 1), x + 4y + 3z + 5 = 0.
Уравнение прямой, которая проходит через точку M перпендикулярно заданной плоскости будет:
 .
.
Найдем точку пересечения прямой и плоскости.
 ,
,
 ,
,
(1 + t) + 4(1 + 4t) + 3(1 + 3t) + 5 = 0,
Откуда  – точка пересечения прямой и плоскости.
– точка пересечения прямой и плоскости.  является серединой отрезка MM’, поэтому
является серединой отрезка MM’, поэтому
 ,
, 
 ,
, 
 ,
, 
Даны плоскость α: x + 2y – z – 2 = 0 и две точки А(1, -2, -3) и В (-1, -1, -2). Найдите на этой плоскости точку С такую, чтобы ломаная АСВ имела наименьшую длину.
Данная плоскость пересекает оси координат в точках
Две заданные точки лежат по одну сторону от данной плоскости.
Если бы две точки лежали по разные стороны от плоскости α, то очевидно, искомой точкой С была бы точка пересечения отрезка, концами которого являются данные точки, с плоскостью α, а ломаная выродилась бы в отрезок.
Сведем нашу задачу к описанной ситуации.
Для этого найдем точку, симметричную любой из заданных относительно данной плоскости α.
Например, точке А.
Используя решение задачи 1, получим следующую последовательность действий.
Уравнение прямой, которая проходит через точку А перпендикулярно заданной плоскости будет:
 .
.
Найдем точку пересечения полученной прямой и плоскости α.
 .
.
 .
.
(1 + t) + 2(2t – 2) — (-t– 2) – 2 = 0
Откуда точка пересечения прямой, перпендикулярной плоскости α и проходящей через точку А, с плоскость α  . Точка пересечения прямой и плоскости.
. Точка пересечения прямой и плоскости.  является серединой отрезка АА’, поэтому
является серединой отрезка АА’, поэтому
 ,
, 
 ,
, 
 ,
, 
Теперь найдем точку пересечения отрезка A’B с плоскостью α.
Прямая A’B имеет направляющий вектор  .
.
Уравнение прямой A’B:
 .
.
Найдем точку пересечения полученной прямой и плоскости α.
 .
.
 .
.
 .
.
Таким образом, координаты искомой точки  .
.
Ответ:  .
.
Примеры и разбор решения заданий тренировочного модуля
1. Напишите уравнение образа плоскости 2x + 5y – z – 5 = 0 при симметрии относительно плоскости Oxz.
Найдем координаты двух точек плоскости 2x + 5y – z – 5 = 0, лежащих в плоскости Oxz. Для этого найдем точки плоскости, принадлежащие осям координат.
OX: z = y = 0, x = 2,5 A(2,5; 0; 0)
OZ: x = y = 0, z = -5 B(0; 0; -5).
Эти точки принадлежат и образу плоскости 2x + 3y – z – 5 = 0 при симметрии относительно плоскости Oxz.
Теперь найдем точку данной плоскости, принадлежащую оси ординат.
OY: z = x = 0, y = 2,5 С(0; 1; 0).
Точка, симметричная точке С относительно плоскости Oxz, имеет координаты С'(0; -1; 0).
Теперь напишем уравнение плоскости через три полученные точки.
Плоскость в трехмерном пространстве с примерами решения
Содержание:
Общее уравнение плоскости:
Пусть 

которое называется уравнением плоскости, проходящей через точку  и имеющей нормальный вектор
и имеющей нормальный вектор  . Его можно преобразовать к виду
. Его можно преобразовать к виду
 (8.1.2)
(8.1.2)
где  . Уравнение (8.1.2) называется общим уравнением плоскости.
. Уравнение (8.1.2) называется общим уравнением плоскости.
Приведём уравнение плоскости (8.1.2) к специальному виду. Для этого перенесём свободный член в правую часть уравнения:  .
.
Разделим обе части уравнения на —D получим:
 (8.1.3)
(8.1.3)
Это и есть специальный вид уравнения плоскости или уравнение плоскости «в отрезках», где а, b, с — величины отрезков, которые отсекает плоскость на координатных осях.
Если плоскость проходит через точки  , не лежащие на одной прямой, то её уравнение можно записать в виде
, не лежащие на одной прямой, то её уравнение можно записать в виде

Разложив данный определитель по элементам первой строки, придём к уравнению вида (8.1.1).
Уравнения (8.1.1), (8.1.3), (8.1.4) можно привести к виду (8.1.2).
Пример:
Составить уравнение плоскости, проходящей через точки А(0, -2, -1), В(2, 4, -2) и С(3, 2, 0).
Решение:
Воспользуемся формулой (8.1.4), где 

Подставив координаты точек A, В и С, получим:  Разложим определитель по элементам первой строки:
Разложим определитель по элементам первой строки: Вычислив три определителя второго порядка, получим уравнение:
Вычислив три определителя второго порядка, получим уравнение:  . Сократив на 5 и приведя подобные, найдем уравнение искомой плоскости АВС:
. Сократив на 5 и приведя подобные, найдем уравнение искомой плоскости АВС:  .
.
Взаимное расположение двух плоскостей, прямой и плоскости
Углом между прямой и плоскостью будем называть угол, образованный прямой и ее проекцией на плоскость (рис. 8.1). Пусть прямая L и плоскость а заданы уравнениями:
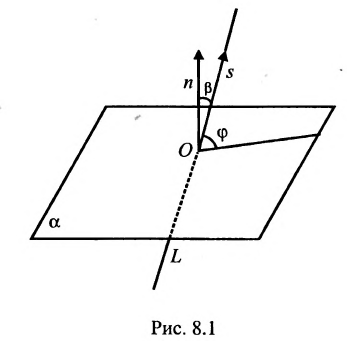

Рассмотрим направляющий вектор  прямой L и нормальный вектор
прямой L и нормальный вектор  плоскости
плоскости  (рис. 8.1). Если угол
(рис. 8.1). Если угол  между ними острый, то его можно представить в виде разности
между ними острый, то его можно представить в виде разности , где
, где  — угол между прямой L й плоскостью
— угол между прямой L й плоскостью  . Тогда косинус угла между векторами
. Тогда косинус угла между векторами  и
и  равен синусу угла между прямой L и плоскостью
равен синусу угла между прямой L и плоскостью  т.е.
т.е.
 .
.
Если угол  между векторами
между векторами  тупой, то его можно представить в виде суммы
тупой, то его можно представить в виде суммы  . Поэтому в любом случае
. Поэтому в любом случае  . Воспользовавшись формулой вычисления косинуса угла между векторами, получим формулу и для вычисления угла между прямой L и плоскостью
. Воспользовавшись формулой вычисления косинуса угла между векторами, получим формулу и для вычисления угла между прямой L и плоскостью :
:

Условие перпендикулярности прямой и плоскости. Прямая и плоскость перпендикулярны тогда и только тогда, когда направляющий вектор  прямой L и нормальный вектор
прямой L и нормальный вектор  плоскости
плоскости  коллинсарны, т.е. их координаты пропорциональны:
коллинсарны, т.е. их координаты пропорциональны:

Условие параллельности прямой и плоскости. Прямая L и плоскость  параллельны тогда и только тогда, когда векторы
параллельны тогда и только тогда, когда векторы  и
и
 перпендикулярны, т.е. их скалярное произведение равно нулю:
перпендикулярны, т.е. их скалярное произведение равно нулю:  (8.2.3)
(8.2.3)
Пример:
Написать уравнение плоскости, проходящей через точку  параллельно прямым
параллельно прямым  и
и
Решение:
Так как  , то уравнение плоскости будем искать в виде
, то уравнение плоскости будем искать в виде

Применяя условие параллельности (8.2.3) прямой и плоскости, получим систему линейных уравнений
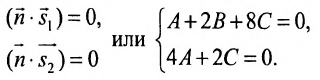
где 
Решив систему, найдем:
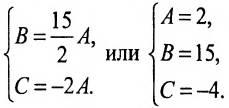
Подставив найденные значения коэффициентов А,В,С, полУ
чим искомое уравнение плоскости:


Угол между плоскостями. Рассмотрим две плоскости  заданные соответственно уравнениями:
заданные соответственно уравнениями:
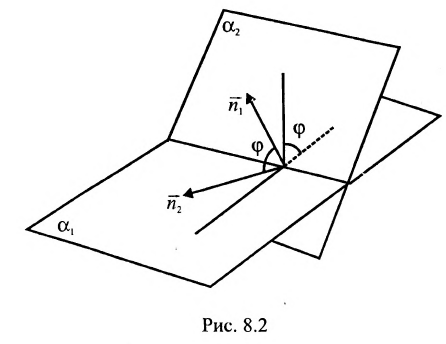
Под углом между двумя плоскостями будем понимать один из двугранных углов, образованных этими плоскостями. Очевидно,
что угол между нормальными векторами  плоскостей
плоскостей  равен одному из указанных смежных двугранных углов
равен одному из указанных смежных двугранных углов 
или  .Поэтому
.Поэтому  . Т.к.
. Т.к.  и
и
 , то
, то

Пример:
Определить угол между плоскостями 

Решение:
Воспользовавшись формулой (8.2.4), получим:

Условие параллельности двух плоскостей. Две плоскости  параллельны тогда и только тогда, когда их нормальные векторы
параллельны тогда и только тогда, когда их нормальные векторы  и
и  параллельны.
параллельны.
Векторы параллельны, если их координаты пропорциональны:

Две плоскости перпендикулярны тогда и только тогда, когда их нормальные векторы  перпендикулярны. Следовательно, их скалярное произведение равно нулю:
перпендикулярны. Следовательно, их скалярное произведение равно нулю:  , или
, или  (8.2.6)
(8.2.6)
Пример:
Составить уравнение плоскости, проходящей через точку M(-2, 1, 4) параллельно плоскости  .
.
Решение:
Уравнение плоскости будем искать в виде  . Из условия параллельности плоскостей следует, что:
. Из условия параллельности плоскостей следует, что:  . Положив А=3, В=2, С=-7, получим уравнение плоскости
. Положив А=3, В=2, С=-7, получим уравнение плоскости
Так как  , то координаты этой точки удовлетворяют уравнению. Подставив координаты точки, — 6+2 — 28+D=0, найдем D = 32. Тогда искомое уравнение плоскости будет иметь вид: 3х + 2у -7z + 32=0.
, то координаты этой точки удовлетворяют уравнению. Подставив координаты точки, — 6+2 — 28+D=0, найдем D = 32. Тогда искомое уравнение плоскости будет иметь вид: 3х + 2у -7z + 32=0.
Пример:
Составить уравнение плоскости, проходящей через точки перпендикулярно плоскости x+y+z=0.
перпендикулярно плоскости x+y+z=0.
Решение:
Так как  , то используя уравнение плоскости, проходящей через заданную точку, будем иметь
, то используя уравнение плоскости, проходящей через заданную точку, будем иметь

Далее, так как  , то подставив координаты точки в записанное уравнение, получим равенство -А-2С = 0 или А + 2С = 0.
, то подставив координаты точки в записанное уравнение, получим равенство -А-2С = 0 или А + 2С = 0.
Учитывая, что заданная плоскость перпендикулярна искомой, составим еще одно уравнение: A+B+С=0. Получим систему:
Выразив коэффициенты А и В через С: А = -2 С, В=С и подставив их в уравнение (8.2.7), -2С (х-1)+С (у-1)+С (z-l)=0, определяем искомое уравнение: —2х + у +z = 0 .
Понятие гиперплоскости
Взаимное расположение гиперплоскостей:
Рассмотрим n-мерное векторное пространство Пусть вектор  этого пространства имеет координаты
этого пространства имеет координаты  . По аналогии с пространством
. По аналогии с пространством  , естественно считать, что и в n-мерном векторном пространстве
, естественно считать, что и в n-мерном векторном пространстве  координаты
координаты  произвольного вектора
произвольного вектора  являются в то же время координатами некоторой точки М пространства
являются в то же время координатами некоторой точки М пространства  . Тогда вектор х назовём радиус-вектором точки М Следовательно, каждому вектору можно поставить в соответствие точку и мы получим n-мерное точечное пространство
. Тогда вектор х назовём радиус-вектором точки М Следовательно, каждому вектору можно поставить в соответствие точку и мы получим n-мерное точечное пространство . Точка О с координатами (О, 0, . 0) называется началом координат. Ей отвечает нулевой вектор. Геометрическое место точек
. Точка О с координатами (О, 0, . 0) называется началом координат. Ей отвечает нулевой вектор. Геометрическое место точек  называется координатной осью. Следовательно. в
называется координатной осью. Следовательно. в  имеется n координатных осей:
имеется n координатных осей: 
Совокупность точек  называется координатной гиперплоскостью
называется координатной гиперплоскостью  .
.
Определение 8.3.1. Гиперплоскостью в п-мериом пространстве  называется геометрическое место точек, координаты которых удовлетворяют линейному (векторному) уравнению:
называется геометрическое место точек, координаты которых удовлетворяют линейному (векторному) уравнению:

где  — произвольные действительные числа.
— произвольные действительные числа.
Заметим, что все  не могут равняться нулю.
не могут равняться нулю.
Рассмотрим две гиперплоскости:

Множество точек, принадлежащих как первой, так и второй гиперплоскости, называется их пересечением.
Теорема 8.3.1. Две гиперплоскости (8.3.2) и (8.3.3) не пересекаются в том и только в том случае, когда коэффициенты при соответствующих неизвестных пропорциональны, а свободные члены находятся в ином отношении:

Доказательство. Пусть гиперплоскости (8.3.2) и (8.3.3) не пересекаются. Следовательно, они не имеют общих точек и система
 несовместна.
несовместна.
И наоборот, если система несовместна, то гиперплоскости (8.3.2) и (8.3.3) не пересекаются.
В силу теоремы Кронекера- Капелли система (8.3.5) несовместна, если ранг матрицы не равен рангу расширенной матрицы системы. А так как ранг расширенной матрицы системы не больше 2, то ранг матрицы системы должен ть равен 1. Эта возможность выражается условием (8.3.4).Поскольку для того, чтобы матрица  имела ранг r = 1, нужно, чтобы строки были линейно зависимы, т.е. пропорциональны.
имела ранг r = 1, нужно, чтобы строки были линейно зависимы, т.е. пропорциональны.
Ранг матрицы  будет равен двум, если существует хотя бы один определитель второго порядка не равный нулю, т.е. если строки не пропорциональны. Теорема доказана.
будет равен двум, если существует хотя бы один определитель второго порядка не равный нулю, т.е. если строки не пропорциональны. Теорема доказана.
Теорема 8.3.2. Для того, чтобы уравнения (8.3.2) и (8.3.3) определят одну и ту же гиперплоскость, необходимо и достаточно, чтобы выполнялись условия:

Доказательство. Достаточность. Пусть условия (8.3.6) выполнены. Обозначим отношения через t, т.е.
Тогда уравнение (8.3.2) можно получить из (8.3.3) умножением всех его членов на t. Поэтому уравнения равносильны и, следовательно, определяют одну и ту же гиперплоскость.
Необходимость. Пусть уравнения (8.3.2) и (8.3.3) определяют одну и ту же гиперплоскость. Система (8.3.5) совместна и, следовательно, ранг матрицы системы равен рангу расширенной матрицы. И т.к. эта система определяет одну гиперплоскость, то каждое из уравнений можно рассматривать как систему. Поэтому ранг этой системы равен 1 и все миноры второго порядка равны нулю, т.е.
Откуда следует, что
Определение 8.3.2. Две гиперплоскости называются параллель-ными, если они не пересекаются или совпадают.
Тогда из теорем 8.3.1 и 8.3.2 вытекает
Теорема 8.3.3. Две гиперплоскости (8.3.2) и (8.3.3) параллельны тогда и только тогда, когда соответствующие коэффициенты
пропорциональны, т.е. 
Введем понятие прямой в n мерном пространстве по аналогии с параметрическими уравнениями прямой в трехмерном пространстве.
Определение 8.3.3. Прямой в  называется множество точек
называется множество точек  (или векторов
(или векторов  , удовлетворяющих уравнениям:
, удовлетворяющих уравнениям:
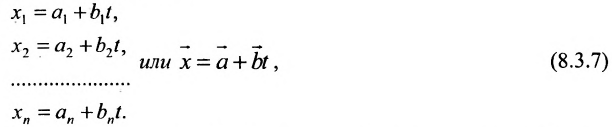
где  , a t- переменный параметр,
, a t- переменный параметр,  .
.
Определение 8.3.4. Отрезком в  называется множество точек
называется множество точек  (или векторов
(или векторов  ), удовлетворяющих уравнениям (8.3.7) при изменении параметра t в закрытом интервале
), удовлетворяющих уравнениям (8.3.7) при изменении параметра t в закрытом интервале  . Точки
. Точки  называются концами отрезка.
называются концами отрезка.
Теорема 8.3.4. Всякая точка отрезка может быть выражена линейной комбинацией его концов:

Если в трехмерном пространстве провести плоскость, то она разделит его на две части, называемые полупространствами. Очевидно, и гиперплоскость разделит n-мерное пространство на полупространства, т.е. справедливо.
Определение 8.3.5. Полупространствами, порождаемыми гиперплоскостью  называются два множества точек, удовлетворяющих соответственно условиям:
называются два множества точек, удовлетворяющих соответственно условиям:

Гиперплоскость принадлежит обоим полупространствам, является их общей частью. Из (8.3.9) следует, что любое линейное неравенство геометрически определяет полупространство соответствующей размерности.
Определение 8.3.6. Множество точек  удовлетворяющих условию
удовлетворяющих условию  или
или  называется гиперсферой с центром в точке
называется гиперсферой с центром в точке  и радиусом r.
и радиусом r.
Системы m линейных неравенств с n неизвестными
В элементарной математике мы познакомились с линейными неравенствами одного или двух переменных:

Решением таких неравенств является промежуток числовой оси или полуплоскость.
Рассмотрим теперь линейное неравенство с n переменными:
 в n-мерном пространстве.
в n-мерном пространстве.
Несколько неравенств, рассматриваемых совместно, образуют систему:

Определение 8.4.1. Областью решений системы т неравенств с п неизвестными называется множество точек пространства  координаты которых удовлетворяют каждому из неравенств системы.
координаты которых удовлетворяют каждому из неравенств системы.
Из того факта, что областью решения линейного неравенства является полупространство, вытекает
Теорема 8.4.1. Область решений системы линейных неравенств есть пересечение некоторого числа полупространств.
Это пересечение является выпуклым множеством; оно ограничено гиперплоскостями

Так как линейные неравенства (8.4.1) независимы, то система (8.4.2) при m-n будет либо определённой, либо несовместной. И, следовательно, пересечение n гиперплоскостей в n-мерном пространстве либо даёт точку, либо не содержит ни одной точки.
Так как число систем по n уравнений с n неизвестными, которое может быть получено из (8.4.2) не может быть сколь угодно большим, и так как не всякая точка пересечения гиперплоскостей (является решением) принадлежит пересечению всех m гиперплоскостей, то число крайних точек, т.е. точек пересечения гиперплоскостей, принадлежащих данному множеству, ограничено. Следовательно, рассматриваемое множество будет многогранником, а крайние точки — его вершинами.
Итак, .областью решений совместной системы линейных нера-qchqtb является выпуклый многогранник, гранями которого служат некоторые части гиперплоскостей.
Пример:
Найти решение системы линейных неравенств
Решение:
Строим на плоскости  граничные прямые:
граничные прямые: 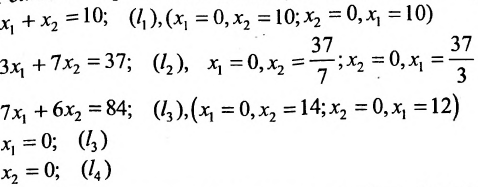
соответствующие заданным неравенствам (рис. 8.3). Каждая из них делит плоскость на две полуплоскости, одна из которых является решением соответствующего неравенства. Для выбора полуплоскости, являющейся решением неравенства, подставляем начало координат О (0, 0) в каждое неравенство. Если получаем верное неравенство, то полуплоскость, содержащая начало координат, является решением неравенства, в противном случае — полуплоскость, не содержащая начало координат, является решением неравенства.
Стрелки указывают полуплоскости, являющиеся областями решений данных неравенств. Пересечение отмеченных полуплоскостей- заштрихованный четырехугольник АВСД на рис. 8.3- область решения данной системы.
Применение систем линейных неравенств в экономических исследованиях
Рассмотрим систему m линейных неравенств с n переменными:
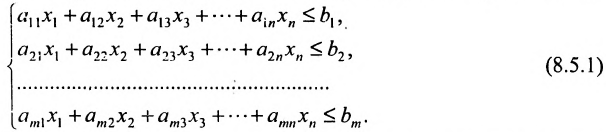
Каждое неравенство системы определяет полупространство. Решением системы (8.5.1) является пересечение этих полупространств.
Системы линейных неравенств широко применяются во многих экономических задачах, в частности, при построении линейной модели производства. Производственный способ описывает производство продукции и расход ресурсов в единицу времени. Он математически задается вектором выпуска или вектором валовой продукции  и вектором
и вектором  называемым вектором затрат, отвечающим выпуску x.
называемым вектором затрат, отвечающим выпуску x.
Если в производственной системе используется m видов производственных ресурсов, определены запасы ресурса i при использовании j-той технологии, то модель производственной системы математически приобретает вид системы линейных неравенств (8.5.1), в которой  .
.
Пример:
Пусть известно содержание питательных веществ в единице каждого из имеющихся в хозяйстве кормов. Известна также цена каждого корма. Требуется определить все возможные рационы для кормления скота, которые удовлетворяли бы суточную потребность в каждом питательном веществе, а общая стоимость используемых кормов не превосходила бы A.
Решение:
Введем обозначения: m — число питательных веществ; n — число изменяющихся видов кормов;  —количество единиц i -го питательного вещества в единице j -го корма;
—количество единиц i -го питательного вещества в единице j -го корма;  — дневная потребность в / -ом питательном веществе;
— дневная потребность в / -ом питательном веществе;  —стоимость единицы j -го корма;
—стоимость единицы j -го корма;  —количество единиц j-го корма, используемого в рационе
—количество единиц j-го корма, используемого в рационе  .
.
Задача рациона формулируется следующим образом: определить рацион  , удовлетворяющий условиям:
, удовлетворяющий условиям:
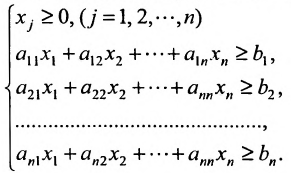
стоимость которого ограничена величиной А: 
 .
.
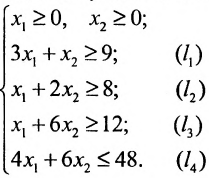
Например, пусть ;
;

Тогда получаем систему:
Определим множество решений данной системы на плоскости  . Вначале строим граничные прямые
. Вначале строим граничные прямые 

(рис. 8.4) соответствующие данным неравенствам. Каждая из них делит плоскость на две полуплоскости, одна из которых является решением соответствующего неравенства. Для выбора полуплоски являющейся решением неравенства, подставляем  в каждое неравенство.
в каждое неравенство.
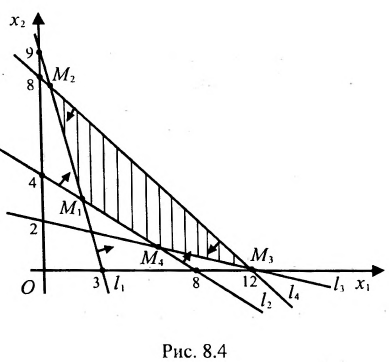
Если получаем верное неравенство, то полуплоскость, содержащая начало координат, является решением неравенства, в противном случае — полуплоскость, не содержащая начало координат, является решением неравенства.
Стрелки на прямых указывают полуплоскости, являющиеся областями решений данных неравенств. Заштрихованный четырехугольник  и определяет все возможные рационы
и определяет все возможные рационы  для кормления скота, удовлетворяющие данным условиям.
для кормления скота, удовлетворяющие данным условиям.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Функция одной переменной
- Производная функции одной переменной
- Приложения производной функции одной переменной
- Исследование поведения функций
- Ранг матрицы — определение и вычисление
- Определители второго и третьего порядков и их свойства
- Метод Гаусса — определение и вычисление
- Прямая линия на плоскости и в пространстве
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://resh.edu.ru/subject/lesson/5731/conspect/
http://www.evkova.org/ploskost-v-trehmernom-prostranstve