Уравнение поступательного движения груза на нити
В эксперименте исследуется вращательное движение закрепленной на оси системы тел, у которой может меняться момент инерции. Различные моменты внешних сил создается грузами, подвешенными на нити, намотанной на шкив.
Основное уравнение вращательного движения твердого тела с моментом инерции J вокруг неподвижной оси z имеет вид
 (1.1)
(1.1) — угловое ускорение, M — момент внешних сил.
— угловое ускорение, M — момент внешних сил.  Для экспериментального доказательства этого соотношения в работе используется маятник Обербека (рис.3). Он состоит из четырех стержней A и двух шкивов различного радиуса R1 и R2, укрепленных на одной горизонтальной оси. По стержням могут перемещаться и закрепляться в нужном положении четыре (по одному на каждом стержне) груза одинаковой массы m ‘ . При помощи груза массы m, прикрепленного к концу намотанной на тот или иной шкив нити, маятник может приводиться во вращение.
Для экспериментального доказательства этого соотношения в работе используется маятник Обербека (рис.3). Он состоит из четырех стержней A и двух шкивов различного радиуса R1 и R2, укрепленных на одной горизонтальной оси. По стержням могут перемещаться и закрепляться в нужном положении четыре (по одному на каждом стержне) груза одинаковой массы m ‘ . При помощи груза массы m, прикрепленного к концу намотанной на тот или иной шкив нити, маятник может приводиться во вращение. Пренебрегая силами трения и считая нить невесомой и нерастяжимой, можем написать: уравнение вращательного движения маятника
 (1.2)
(1.2) (1.3)
(1.3) (1.4)
(1.4)Из системы уравнений (1.2-1.4) следует, что груз m должен двигаться с постоянным ускорением
 (1.5)
(1.5)
 J можно записать, что M
J можно записать, что M  mgR.
mgR. Оценить величину момента сил трения можно, если предположить, что он остается неизменным во время движения. При опускании груза m c отметки x0 на полную длину нити до отметки x3 и затем при последующем подъеме до отметки x4 изменение его потенциальной энергии будет равно работе силы трения, то есть



 (1.6)
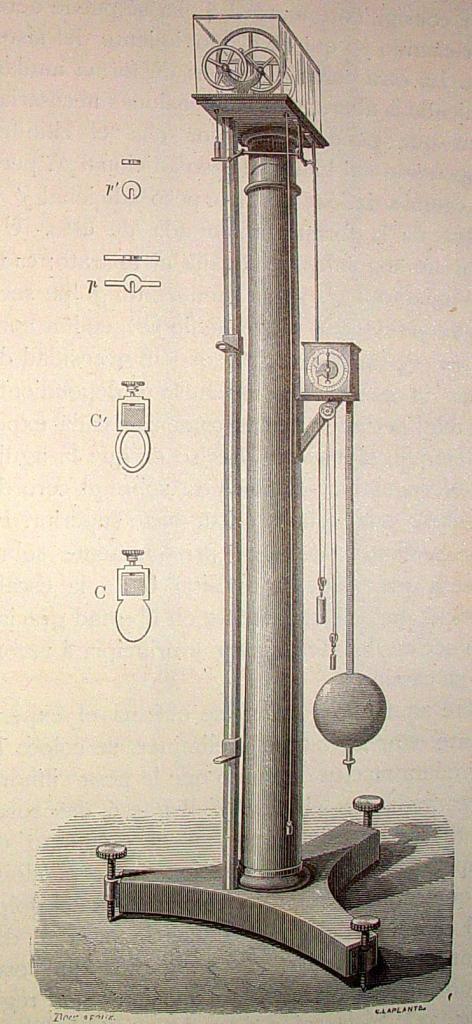
(1.6)Установка для изучения вращательного движения (рис.4) или AVI (15.3M) состоит из основания (1), вертикальной колонны (2) с закрепленными на ней двумя подвижными кронштейнами (3,4), на которых крепятся оптические датчики положения. На колонне закреплены два неподвижных кронштейна (5,6).
 На нижнем кронштейне (5) закреплен двухступенчатый вал (7). На верхнем кронштейне (6) закреплен подшипниковый узел (8) и блок (9). Через блок перекинута нить (10), один конец которой намотан на двухступенчатый вал (7), а на втором конце закреплен груз (11). На двухступенчатом валу крепятся тело маятника (12).
На нижнем кронштейне (5) закреплен двухступенчатый вал (7). На верхнем кронштейне (6) закреплен подшипниковый узел (8) и блок (9). Через блок перекинута нить (10), один конец которой намотан на двухступенчатый вал (7), а на втором конце закреплен груз (11). На двухступенчатом валу крепятся тело маятника (12).
Кронштейны с фотодатчиками могут крепиться на разной высоте. Расстояние между этими кронштейнами измеряется по шкале, нанесенной на колонне. Время движения грузов определяют с помощью электронного таймера. Запуск таймера осуществляется нажатием кнопки «Пуск», остановка — кнопкой «Стоп». При подготовке к дальнейшим измерениям результаты предыдущих измерений убираются с табло таймера нажатием кнопки «Сброс».
Упражнение 1. Проверка закона движения.
Из (1.2-1.4) следует, что вращение маятника Обербека происходит с постоянным угловым ускорением  , при этом груз m опускается с постоянным линейным ускорением a. Координата x груза, отпушенного без начальной скорости с отметки x0 меняется по закону (ось х системы координат направлена вниз (см. рис. 3))
, при этом груз m опускается с постоянным линейным ускорением a. Координата x груза, отпушенного без начальной скорости с отметки x0 меняется по закону (ось х системы координат направлена вниз (см. рис. 3))
 (1.7)
(1.7) t пролета груза между двумя отметками x1 и x2:
t пролета груза между двумя отметками x1 и x2: (1.8)t от
(1.8)t от  является линиейной и изображается на графике прямой линией.
является линиейной и изображается на графике прямой линией.- Установить максимальное расстояние между кронштейнами с фотодатчиками
- Установить грузы m ‘ в среднее положение, разместив их на равном расстоянии от оси таким образом, чтобы маятник находился в положении безразличного равновесия. Начало движения груза m всегда осуществляют от одного и того же положения x0, которое необходимо записать в рабочий журнал. Нить наматывают на вал большего диаметра виток к витку.
- Опустить груз m и произвести измерение времени
 t пролета груза m между фотодатчиками. Данные записать в таблицу 1.1 Провести измерения времени t для нескольких положений x1 верхнего датчика (рекомендуется менять x1 с шагом 5 см). Для каждого положения датчика измерения времени проводят не менее 3-х раз.
t пролета груза m между фотодатчиками. Данные записать в таблицу 1.1 Провести измерения времени t для нескольких положений x1 верхнего датчика (рекомендуется менять x1 с шагом 5 см). Для каждого положения датчика измерения времени проводят не менее 3-х раз. - Для 5-7 первых опытов измерить значения x4 — отметки, до которой поднимается груз при вращении маятника в одну сторону. Результаты занести в табл. 1.1.
- Определить значение x3 — максимальной отметки, до которой опускается груз m при своем движении.
Таблица 1.1
| N | x1i | x4 |  | tij | S |  |
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| 10 | ||||||
| 11 | ||||||
| 12 | ||||||
| 13 | ||||||
| 14 | ||||||
| 15 |
Обработка результатов
- По экспериментальным данным для каждого положения фотодатчика x1 рассчитать среднее значение величины ti по формуле

- Вычислить ошибку измерения (выборочное стандартное отклонение)

- Построить зависимость t от , которая должна быть линиейной. Получившаяся линейная зависимость указывает на то, что движение тела является равнопеременным.
- Найти среднее значение и оценить величину по формуле (1.6). Убедиться в малости момента сил трения по сравнению с начальным моментом силы натяжения нити.
Упражнение 2. Проверка независимости инерционных свойств маятника (момента инерции) от момента внешних сил.
В данном упражнении экспериментально показывается, что инерционные свойства маятника, а именно — момент инерции — не зависят от момента внешних сил.
Из уравнения (1.2) имеем
 (1.9)
(1.9) (1.10)
(1.10)- Измерить штангенциркулем радиусы R1 и R2 шкивов, результаты, занести в рабочую тетрадь.
- Устаноновить максимальное расстояние между кронштейнами с фотодатчиками. Занести в рабочий журнал координаты фотодатчиков x1, x2 и значение x0.
- Установить грузы m ‘ в среднее положение, разместив их на равном расстоянии от оси таким образом, чтобы маятник находился в положении безразличного равновесия.
- На конец нити, намотанной на шкив радиуса R1, прикрепить груз массы m1 и измерить время прохождения груза между двумя фотодатчиками t. Одновременно измерить x4— отметку, до которой поднимается груз. Измерение провести 3 раза. и результаты внести в табл.1.2.
- Перебросить нить на другой шкив (радиуса R2). и измерить время t и значение x4 (3 раза). Результаты внести в табл. 1.2.
- Провести аналогичные измерения (п.4-п.5), прикрепив к концу нити груз массы m2. Результаты измерений занести в табл.1.2.
Таблица 1.2
| Комбинации значений радиусов шкивов и масс при измерениях | N | tij | x4 | , S | Ji , SJi | |
| R1 , m1 | 1 | |||||
| 2 | ||||||
| 3 | ||||||
| R2 , m1 | 4 | |||||
| 5 | ||||||
| 6 | ||||||
| R1 , m2 | 7 | |||||
| 8 | ||||||
| 9 | ||||||
| R2 , m2 | 10 | |||||
| 11 | ||||||
| 12 |
Обработка результатов
- По экспериментальным данным вычислить средние значения величин t и ошибки их измерений для четырех различных опытов. Результаты вычислений внесети в табл.1.2.
- Вычислить значения моментов инерции J1:J4 по формуле (1.10).
- Определить значение для каждого опыта.
- Найти отношение аналогично тому, как это было сделано в упр.1. Результаты внести в табл. 1.2.
- Произвести оценку погрешностей полученных результатов. В связи с тем, что экспериментальные значения Ji являются результатом косвенных измерений, то стандартное отклонение функции нескольких независимых переменных находится через ошибки прямых измерений по формуле для ошибки косвенных измерений.
- Проанализировать полученный результат. Для этого отметить значения моментов инерции J1:J4 с учетом погрешностей на числовых осях (рис.5), выбирая Ji=SJi. Пересечение этих областей будет указывать на выполнение соотношения (1.9) , что свидетельствеут о независимости инерционных свойств маятника от момента внешних сил.
 Проанализировать полученный результат. Для этого отметить значения моментов инерции J1:J4 с учетом погрешностей на числовых осях (рис.5), выбирая Ji=SJi. Пересечение этих областей будет указывать на выполнение соотношения (1.9) , что свидетельствеут о независимости инерционных свойств маятника от момента внешних сил.
Проанализировать полученный результат. Для этого отметить значения моментов инерции J1:J4 с учетом погрешностей на числовых осях (рис.5), выбирая Ji=SJi. Пересечение этих областей будет указывать на выполнение соотношения (1.9) , что свидетельствеут о независимости инерционных свойств маятника от момента внешних сил.Упражнение 3. Проверка основного уравнения вращательного движения и теоремы Гюйгенса-Штейнера.
Пусть J0 ‘ — суммарный момент инерции четырех грузов с массами M ‘ относительно осей, проходящих через их центры масс. При удалении центров грузов на расстояние l=l1, от оси вращения (см. рис. 3), согласно теореме Гюйгенса — Штейнера , момент инерции будет равен J1 ‘
 (1.11)
(1.11) (1.12)
(1.12) (1.13)
(1.13) (1.14)
(1.14) (1.15)
(1.15) (1.16)t1 , t2 — времена пролета груза между датчиками для случаев l=l1 и l=l2 соответственно.
(1.16)t1 , t2 — времена пролета груза между датчиками для случаев l=l1 и l=l2 соответственно. В это уравнение входят величины, определяемые экспериментально.
- На конец нити, намотанной на шкив радиуса R2 (большего по размеру), прикрепить груз наибольшей массы. Фотодатчики оставить в том же положении, что и в упражнении 2.
- Установить минимальное значение момента инерции маятника. Для этого грузы m ‘ установить в положение, наиболее близкое к оси. Измерить расстояние от грузов до оси. Занести это значение в табл 1.3.
- Определить величину t. — время прохождения груза m между двумя фотодатчиками и x4 — отметку, до которой он поднимается в процессе движения.Измерения проводят 3 раза. Результаты заносят в табл.1.3.
- Изменяя положение грузов m ‘ на стержнях с шагом 3 см, каждый раз измеряют время t. Результаты измерения и соответствующие им расстояния l от оси маятника до центров грузов записать в табл.1.3 . Одновременно для каждого опыта измеряют и заносят в табл. 1.3 значения величины x4 .
Таблица 1.3
| N | ( #tij ) | x4 | , S | ( ti ) 2 , S( ti ) 2 | l | l 2 | | |
| 1 | ||||||||
| 2 | ||||||||
| 3 | ||||||||
| . | ||||||||
Обработка результатов
- По экспериментальным данным для каждого положения грузов m ‘ найти средние значения величин ti.
- Вычислить погрешности измерения ti и ( ti) 2 .
- Построить график зависимости квадрата времени опускания груза ( ti) 2 . от l 2 , — это должна быть прямая линия.
- Проверить соотношение (1.16) для нескольких пар значений t 2 и l 2 .
- Для каждого момента инерции определить и отношение . Убедиться в выполнении приближения .
 .
.Основные итоги работы
В результате выполнения работы должна быть осуществлена экспериментальная проверка выполнения основного уравнения вращательного движения — уравнения моментов. Должны быть проверены соотношения (1.9) и (1.16) и установлена линейная (
t) 2 зависимость от l 2 .Контрольные вопросы
Что такое абсолютно твердое тело? Сколько степеней свободы имеет твердое тело? Сколько независимых скалярных уравнений требуется для описания движения твердого тела?
Почему угловая скорость является вектором? Куда направлен этот вектор?
Что такое момент силы относительно некоторой точки? Куда он направлен? Что такое момент силы относительно закрепленной оси?
Что такое момент импульса системы тел?
Что такое момент инерции тела относительно закрепленной оси?
Сформулируйте теорему Гюйгенса-Штейнера.
Как получить уравнение моментов и основное уравнение вращательного движения относительно закрепленной оси?
Литература
Матвеев А.Н. Механика и теория относительности. 2-е изд. М.: Высшая школа, 1986, § 31,32,34.
Сивухин Д.В. Общий курс физики. Том 1. Механика,3-е изд. M.: Наука.1989, § 30,35.
Расчёт момента инерции маятника Обербека и момента сил сопротивления
Для расчета движения механической системы маятник-груз применим уравнения динамики поступательного движения для груза, закрепленного на нити, и динамики вращательного движения для маятника.
Груз массой m движется с ускорением  под действием результирующей сил тяжести
под действием результирующей сил тяжести  и силы натяжения нити
и силы натяжения нити  . Запишем второй закон Ньютона в проекции на направление движения:
. Запишем второй закон Ньютона в проекции на направление движения:
 (1)
(1)
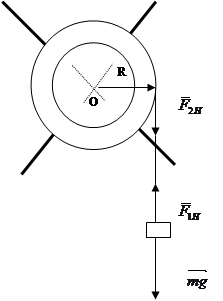 Сила натяжения передается нитью от груза к шкиву вращающегося маятника. Если предположить, что нить невесомая, то на шкив маятника действует сила
Сила натяжения передается нитью от груза к шкиву вращающегося маятника. Если предположить, что нить невесомая, то на шкив маятника действует сила  , равная по величине и противоположная ей по направлению (следствие третьего закона Ньютона:
, равная по величине и противоположная ей по направлению (следствие третьего закона Ньютона:  ). Сила натяжения создает вращательный момент
). Сила натяжения создает вращательный момент  относительно горизонтальной оси O, направленный «от нас» и приводящий в движение маятник Обербека. Величина этого момента равна
относительно горизонтальной оси O, направленный «от нас» и приводящий в движение маятник Обербека. Величина этого момента равна  , где R – радиус шкива, на который намотана нить,
, где R – радиус шкива, на который намотана нить,  , где D -диаметр шкива.
, где D -диаметр шкива.
Момент силы сопротивления относительно оси вращения  направлен в противоположную сторону (к нам).
направлен в противоположную сторону (к нам).
Основной закон динамики вращательного движения:
 ,
,
где  — результирующий момент сил,
— результирующий момент сил,
J – момент инерции маятника,
 — угловое ускорение.
— угловое ускорение.
В скалярной форме это уравнение имеет вид (записаны проекции векторов моментов сил и углового ускорения на ось вращения О, направление которой выбрано «от нас»):
 (2)
(2)
Используя кинематическую связь линейного и углового ускорения  , а также уравнение движения груза
, а также уравнение движения груза  , выразим e через измеряемые величины x и t:
, выразим e через измеряемые величины x и t:
 (3)
(3)
Решим систему уравнений (1) и (2), для чего умножим (1) на R и сложим с (2):
 .
.
Выражаем момент инерции маятника Обербека:
 (4)
(4)
Все величины, кроме МСОПР, входящие в это уравнение, известны. Поставим задачу экспериментального определения МСОПР.
Пусть I – момент инерции маятника Обербека без грузов. Из (4) следует, что
 (5)
(5)
В условиях эксперимента  , что позволяет считать зависимость e(m) линейной.
, что позволяет считать зависимость e(m) линейной.
Эту зависимость можно использовать для экспериментальной оценки величины  . Действительно, если полученную экспериментально зависимость
. Действительно, если полученную экспериментально зависимость  экстраполировать до пересечения с осью абсцисс, то есть до точки
экстраполировать до пересечения с осью абсцисс, то есть до точки  на этой оси, для которой выполняется (см. 5) равенство
на этой оси, для которой выполняется (см. 5) равенство  , то это позволяет определить как
, то это позволяет определить как
 . (6)
. (6)
Для определения момента инерции маятника I воспользуемся (4), где величина МСОПР предварительно определена из измерений e(m) и формулы (6). Подставив выражение e из (3) и МСОПР из (6) в (4), получаем рабочую формулу для определения момента инерции маятника
 .
.
Для используемого в работе маятника Обербека справедливо неравенство  . Учитывая это, получаем:
. Учитывая это, получаем:  .
.
Для расчетов удобно представить момент инерции в виде:
 (7)
(7)
где  .
.
Величины коэффициентов k: k1, k2 для соответствующих диаметров шкивов D1,D2 указываются в паспорте установки. Для определения момента инерции маятника необходимо измерить время t опускания груза массой m.
Зависимость момента инерции маятника от расстояния грузов до оси вращения
Момент инерции маятника Обербека может быть представлен как сумма моментов инерции крестовины со шкивами (I1) и моментов инерции четырех грузиков, закрепленных на расстояниях r от оси вращения (4I2). Если размеры этих грузиков малы в сравнении с r, можно считать, что I2=m1r 2 — момент инерции материальной точки. Тогда момент инерции маятника
 (8)
(8)
Эту зависимость момента инерции от расстояния грузов до оси вращения предполагается проверить, используя результаты, полученные по формуле (7).
Значение можно взять из данных эксперимента для определения момента инерции маятника Обербека без грузов, считая, что момент сил сопротивления остается постоянным.
Задание к работе:
1. Приступив к работе, снимите грузы со стержней, намотайте нить на шкив большего диаметра. Для трёх значений массы подвешенного груза m измерьте время опускания груза t для заданного расстояния x. По формуле (3) рассчитайте величину углового ускорения e для соответствующих значений m.
2. Постройте зависимость e(m). Определите из графика по точке его пересечения с осью абсцисс значение m0, при котором e=0. Рассчитайте по формуле (6) величину момента сил сопротивления МСОПР.
3. Проведите прямые пятикратные измерения времени опускания груза для заданного расстояния x.
4. Рассчитайте среднее время t и определите доверительную погрешность измерения  при доверительной вероятности Р=90%, n=5 (см. «Введение»).
при доверительной вероятности Р=90%, n=5 (см. «Введение»).
5. Вычислите по формуле (7) среднее значение момента инерции крестовины со шкивами  .
.
6. Определите доверительную погрешность косвенных измерений момента инерции крестовины  (см. «Введение») и запишите результаты в виде
(см. «Введение») и запишите результаты в виде  .
.
7. Закрепив грузы m1 на стержнях маятника на равном расстоянии r от оси вращения, определите это расстояние либо с помощью линейки, либо используя указанные около установки исходные данные.
8. Проведите однократные измерения времени t опускания груза массой m (выберите одно значение) для одной высоты падения при трёх различных расстояниях r от оси вращения.
9. Вычислите моменты инерции маятника с грузами на стержнях по формуле (7) при различных расстояниях r. При этом, как показали предварительные опыты, можно с допустимой точностью использовать в качестве величины m0 её значение, найденное ранее для крестовины без грузов на спицах. Сравните полученные данные со значениями момента инерции, вычисленными по формуле (8) для соответствующих значений r. Результаты вычислений занесите в таблицу измерений.
10. Постройте на одном рисунке графики экспериментально полученной и теоретически ожидаемой зависимости момента инерции маятника от r 2 , проанализируйте причины их несовпадения.
1. Какова цель данной работы?
2. Момент инерции, его физический смысл.
3. Как можно изменить момент инерции маятника Обербека?
4. Исходя их уравнений динамики поступательного и вращательного движения, вывести рабочую формулу (7).
5. В каком случае движение маятника является равноускоренным?
6. Как измерить расстояние от оси вращения до центров грузиков, закрепленных на стержнях?
7. Каким образом в данной работе подтверждается линейная зависимость момента инерции от квадрата расстояния тел до оси вращения?
1. Савельев И.В. Курс общей физики. — М, Наука, 1982 г. Т.1. и последующие издания.
Изучение законов поступательного движения на машине Атвуда: формулы и пояснения
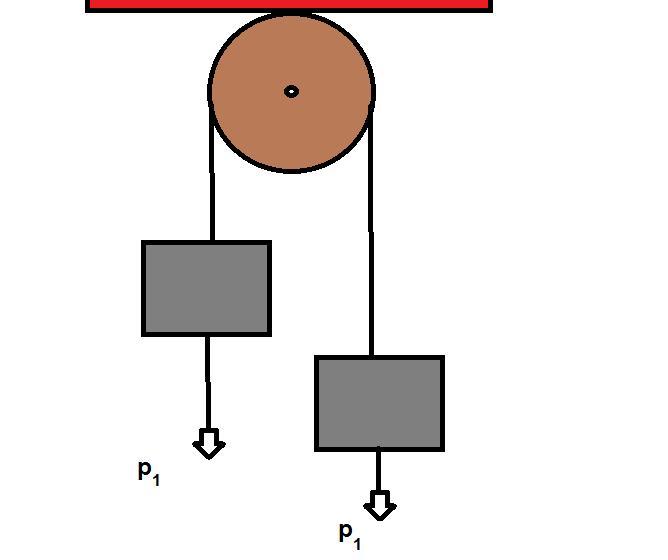
Использование простых механизмов в физике позволяет изучать различные природные процессы и законы. Одним из этих механизмов является машина Атвуда. Рассмотрим в статье, что она собой представляет, для чего используется, и какие формулы описывают принцип ее работы.
Что такое машина Атвуда?
Названная машина представляет собой простой механизм, состоящий из двух грузов, которые соединены переброшенной через неподвижный блок нитью (веревкой). В данном определении следует пояснить несколько нюансов. Во-первых, массы грузов в общем случае являются разными, что обеспечивает наличие у них ускорения под действием силы тяжести. Во-вторых, нить, связывающая грузы, считается невесомой и нерастяжимой. Эти предположения значительно облегчают последующие расчеты уравнений движения. Наконец, в-третьих, неподвижный блок, через который переброшена нить, также считается невесомым. Кроме того, во время его вращения пренебрегают силой трения. Ниже на схематическом рисунке показана эта машина.
 Вам будет интересно: Пространственная экономика: описание специальностей и структура
Вам будет интересно: Пространственная экономика: описание специальностей и структура
 Вам будет интересно: Что такое подполье? Подпольная организация «Молодая гвардия». Антифашистское движение
Вам будет интересно: Что такое подполье? Подпольная организация «Молодая гвардия». Антифашистское движение
Машина Атвуда была изобретена английским физиком Джорджем Атвудом в конце XVIII века. Служит она для изучения законов поступательного движения, точного определения ускорения свободного падения и экспериментальной проверки второго закона Ньютона.
Уравнения динамики
Каждый школьник знает, что ускорение у тел появляется только в том случае, если на них оказывают действие внешние силы. Данный факт был установлен Исааком Ньютоном в XVII веке. Ученый изложил его в следующем математическом виде:
Где m – инерционная масса тела, a – ускорение.
Изучение законов поступательного движения на машине Атвуда предполагает знание соответствующих уравнений динамики для нее. Предположим, что массы двух грузов равны m1 и m2, причем m1>m2. В таком случае первый груз будет перемещаться вниз под действием силы тяжести, а второй груз будет двигаться вверх под действием силы натяжения нити.
Рассмотрим, какие силы действуют на первый груз. Их две: сила тяжести F1 и сила натяжения нити T. Силы направлены в разных направлениях. Учитывая знак ускорения a, с которым перемещается груз, получаем следующее уравнение движения для него:
Что касается второго груза, то на него действуют силы той же природы, что и на первый. Поскольку второй груз движется с ускорением a, направленным вверх, то уравнение динамики для него принимает вид:
Таким образом, мы записали два уравнения, в которых содержатся две неизвестных величины (a и T). Это означает, что система имеет однозначное решение, которое будет получено далее в статье.
Расчет уравнений динамики для равноускоренного движения
Как мы видели из записанных выше уравнений, результирующая сила, действующая на каждый груз, остается неизменной в процессе всего движения. Масса каждого груза также не меняется. Это означает, что ускорение a будет постоянным. Такое движение называют равноускоренным.
Изучение равноускоренного движения на машине Атвуда заключается в определении этого ускорения. Запишем еще раз систему динамических уравнений:
Чтобы выразить значение ускорения a, сложим оба равенства, получаем:
F1 – F2 = a*(m1 + m2) =>
a = (F1 – F2)/(m1 + m2).
Подставляя явное значение сил тяжести для каждого груза, получаем конечную формулу для определения ускорения:
a = g*(m1 – m2)/(m1 + m2).
Отношение разницы масс к их сумме называют числом Атвуда. Обозначим его na, тогда получим:
Проверка решения уравнений динамики

Выше мы определили формулу для ускорения машины Атвуда. Она является справедливой только в том случае, если справедлив сам закон Ньютона. Проверить этот факт можно на практике, если провести лабораторную работу по измерению некоторых величин.
Лабораторная работа с машиной Атвуда является достаточно простой. Суть ее заключается в следующем: как только грузы, находящиеся на одном уровне от поверхности, отпустили, необходимо засечь время движения грузов секундомером, а затем, измерить расстояние, на которое переместился любой из грузов. Предположим, что соответствующие время и расстояние равны t и h. Тогда можно записать кинематическое уравнение равноускоренного движения:
Откуда ускорение определяется однозначно:
Отметим, что для увеличения точности определения величины a, следует проводить несколько экспериментов по измерению hi и ti, где i – номер измерения. После вычисления значений ai, следует рассчитать среднюю величину acp из выражения:
Где m – количество измерений.
Приравнивая это равенство и полученное ранее, приходим к следующему выражению:
Если данное выражение оказывается справедливым, то таковым также будет и второй закон Ньютона.
Расчет силы тяжести
Выше мы предположили, что значение ускорения свободного падения g нам известно. Однако при помощи машины Атвуда определение силы тяжести также оказывается возможным. Для этого вместо ускорения a из уравнений динамики следует выразить величину g, имеем:
Чтобы найти g, следует знать, чему равно ускорение поступательного перемещения. В пункте выше мы уже показали, как его находить экспериментальным путем из уравнения кинематики. Подставляя формулу для a в равенство для g, имеем:
Вычислив значение g, несложно определить силу тяжести. Например, для первого груза ее величина будет равна:
Определение силы натяжения нити
Сила T натяжения нити является одним из неизвестных параметров системы динамических уравнений. Выпишем еще раз эти уравнения:
Если в каждом равенстве выразить a, и приравнять оба выражения, тогда получим:
(F1 – T)/m1 = (T – F2)/m2 =>
T = (m2*F1 + m1*F2)/(m1 + m2).
Подставляя явные значения сил тяжести грузов, приходим к конечной формуле для силы натяжения нити T:
T = 2*m1*m2*g/(m1 + m2).
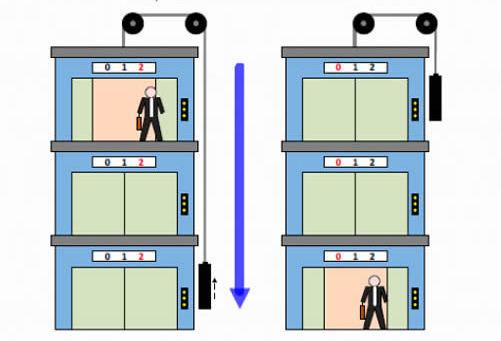
Машина Атвуда имеет не только теоретическую пользу. Так, подъемник (лифт) использует при своей работе контргруз с целью подъема на высоту полезного груза. Такая конструкция значительно облегчает работу двигателя.
http://mydocx.ru/1-28420.html
http://1ku.ru/obrazovanie/52155-izuchenie-zakonov-postupatelnogo-dvizhenija-na-mashine-atvuda-formuly-i-pojasnenija/