Формулы равноускоренного движения по прямой и по окружности. Пример решения задачи

В физике, в разделах кинематики и динамики, изучают различные типы механического движения по разным видам траекторий. Данная статья посвящена рассмотрению графиков и формул равноускоренного движения тел по прямой траектории и по окружности.
Понятие об ускорении
Прежде чем мы перейдем к анализу формул равноускоренного движения, следует дать определение самому ускорению. Под ним в физике полагают векторную величину, которая описывается изменение скорости во времени. Математическая формулировка этого определения выглядит так:
Например, изменение скорости на 1 м/с за одну секунду характеризуется ускорением 1 м/с 2 .
Записанное выражение позволяет вычислить так называемую мгновенную скорость. На практике же часто необходимо знать не значение a¯ в данный момент времени, а некоторую среднюю величину acp¯ за определенный промежуток времени. В таком случае применяют следующую формулу:
Здесь Δv¯ — вектор изменения скорости за время Δt.
Отметим, что вектор ускорения всегда направлен в сторону изменения скорости, поэтому напрямую от вектора скорости он не зависит. В свою очередь, скорость направлена всегда по касательной к траектории в данной точке.
Движение равноускоренное прямолинейное
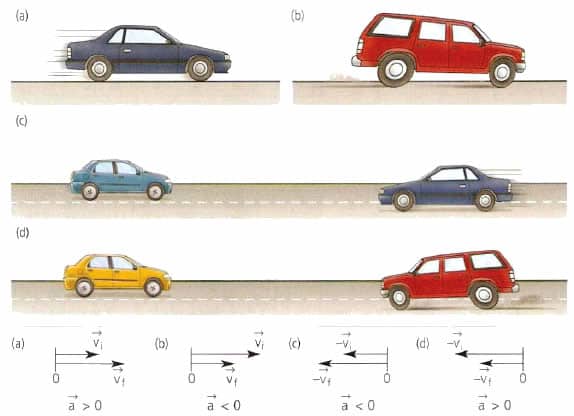
Данный вид движения часто появляется в физических задачах. На практике он также реализуется, например, при разгоне автомобиля с места, при свободном падении тяжелого тела или во время торможения транспортного средства. Во всех этих случаях речь идет о перемещении объектов с постоянным ускорением. Именно поэтому само движение называется равноускоренным (a = const).
Скорость и ускорение равноускоренного движения связаны следующим выражением:
Здесь v0 — скорость, которую тело имело до появления ускорения a. При начале движения с ускорением из состояния относительного покоя значение v0 можно опустить. Тогда получим:
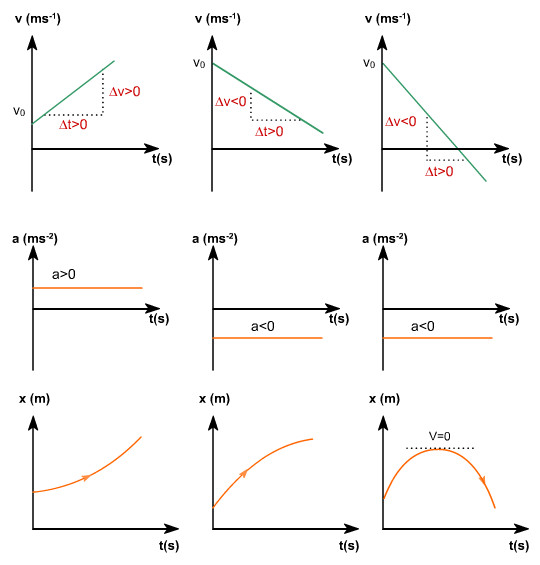
Как видно, графиками равноускоренного движения для функции v(t) будут прямые, которые начинаются либо из точки (0; v0), либо из точки (0; 0). Угол между осью абсцисс и прямой равен арктангенсу от значения ускорения.
В случае наличия начальной скорости v0, ускорение a может быть отрицательным, что на практике соответствует торможению тела. Графиком v(t) при этом будет также прямая линия, но она будет стремиться к нулевому значению скорости. Соответствующая формула принимает вид:
Поскольку ускорение равноускоренного движения от времени не зависит, то графиком функции a(t) будет прямая, параллельная оси времени t.
Перемещение при равноускоренном движении прямолинейном
Выше были приведены три формулы равноускоренного движения по прямой, которые связывают скорость и время (ускорение — постоянная величина). Чтобы рассчитать путь, который тело пройдет за время t при таком типе перемещения, следует проинтегрировать записанные выражения по времени. В результате операции интегрирования мы получим следующие три формулы для пути S:
Все три выражения показывают, что для пути графики равноускоренного движения являются параболами, вернее, правой ее веткой. Для формул 1) и 2) речь идет о возрастающей ветви параболы, поскольку вектор ускорения совпадает с вектором скорости. Для третьего выражения правая ветвь параболы стремится к некоторому постоянному положительному значению S0, соответствующему пути, который тело пройдет до того, как полностью остановится.
Равноускоренное движение по окружности
Этот тип движения во многом отличается от прямолинейного. Во-первых, при ускоренном вращении скорость изменяет свой модуль и свой вектор, что приводит к появлению двух компонент ускорения: касательного и центростремительного. Во-вторых, при вращении нет никакого смысла оценивать, какое расстояние прошло тело, ведь оно движется под одной и той же окружности.
В связи со сказанным для описания движения по окружности пользуются угловыми скоростями и ускорениями. Угловое ускорение показывает, как быстро изменяется угловая скорость в радианах в секунду. С линейным ускорением a угловое α связано следующим выражением:
Где r — радиус траектории вращения.
Для равноускоренного движения по круглой траектории справедливы следующие кинематические формулы:
Здесь θ — угол поворота в радианах за время t. Его можно использовать для вычисления линейного расстояния L, которое тело пройдет вдоль окружности:
Задача со свободным падением
Рассмотрев все важные формулы равноускоренного движения, решим такую задачу: тело брошено вертикально вверх с начальной скоростью 35 м/с. Необходимо определить, на какую высоту оно сможет подняться и через какое время оно упадет на землю. Силами трения можно пренебречь.
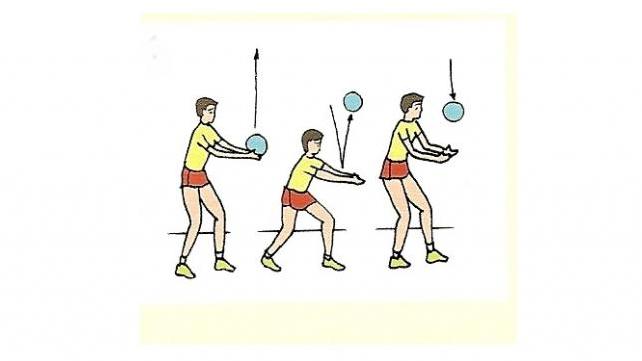
Во время подъема на тело действует ускорение свободного падения g, направленное против скорости, то есть время подъема будет равно:
Пренебрегая силами трения, можно с уверенностью сказать, что время подъема будет равно времени падения, поэтому полное время движения тела равно:
Высоту подъема h можно вычислить по такой формуле:
Таким образом, тело после броска вверх достигнет высоты 62,4 метра, и упадет на поверхность земли через 7,1 секунду после начала движения.
Равноускоренное движение: формулы, примеры
Равноускоренное движение
Равноускоренное движение — это движение, при котором вектор ускорения не меняется по модулю и направлению. Примеры такого движения: велосипед, который катится с горки; камень брошенный под углом к горизонту. Равномерное движение — частный случай равноускоренного движения с ускорением, равным нулю.
Рассмотрим случай свободного падения (тело брошено под уголом к горизонту) более подробно. Такое движение можно представить в виде суммы движений относительно вертикальной и горизонтальной осей.
В любой точке траектории на тело действует ускорение свободного падения g → , которое не меняется по величине и всегда направлено в одну сторону.
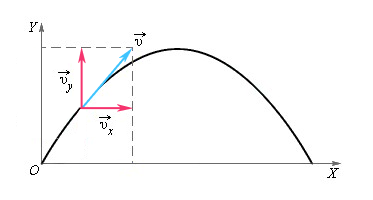
Вдоль оси X движение равномерное и прямолинейное, а вдоль оси Y — равноускоренное и прямолинейное. Будем рассматривать проекции векторов скорости и ускорения на оси.
Формулы для равноускоренного движения
Формула для скорости при равноускоренном движении:
Здесь v 0 — начальная скорость тела, a = c o n s t — ускорение.
Покажем на графике, что при равноускоренном движении зависимость v ( t ) имеет вид прямой линии.
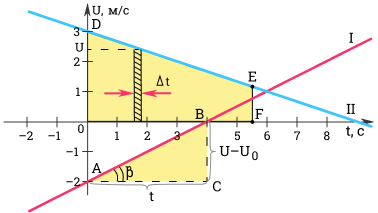
Ускорение можно определить по углу наклона графика скорости. На рисунке выше модуль ускорения равен отношению сторон треугольника ABC.
a = v — v 0 t = B C A C
Чем больше угол β , тем больше наклон (крутизна) графика по отношению к оси времени. Соответственно, тем больше ускорение тела.
Для первого графика: v 0 = — 2 м с ; a = 0 , 5 м с 2 .
Для второго графика: v 0 = 3 м с ; a = — 1 3 м с 2 .
По данному графику можно также вычислить перемещение тела за время t . Как это сделать?
Выделим на графике малый отрезок времени ∆ t . Будем считать, что он настолько мал, что движение за время ∆ t можно считать равномерным движением со скоростью, равной скорости тела в середине промежутка ∆ t . Тогда, перемещение ∆ s за время ∆ t будет равно ∆ s = v ∆ t .
Разобьем все время t на бесконечно малые промежутки ∆ t . Перемещение s за время t равно площади трапеции O D E F .
s = O D + E F 2 O F = v 0 + v 2 t = 2 v 0 + ( v — v 0 ) 2 t .
Мы знаем, что v — v 0 = a t , поэтому окончательная формула для перемещения тела примет вид:
s = v 0 t + a t 2 2
Для того, чтобы найти координату тела в данный момент времени, нужно к начальной координате тела добавить перемещение. Изменение координаты в зависимости от времени выражает закон равноускоренного движения.
Закон равноускоренного движения
y = y 0 + v 0 t + a t 2 2 .
Еще одна распространенная задача кинематики, которая возникает при анализе равноускоренного движения — нахождение координаты при заданных значениях начальной и конечной скоростей и ускорения.
Исключая из записанных выше уравнений t и решая их, получаем:
s = v 2 — v 0 2 2 a .
По известным начальной скорости, ускорению и перемещению можно найти конечную скорость тела:
v = v 0 2 + 2 a s .
При v 0 = 0 s = v 2 2 a и v = 2 a s
Величины v , v 0 , a , y 0 , s , входящие в выражения, являются алгебраическими величинами. В зависимости от характера движения и направления координатных осей в условиях конкретной задачи они могут принимать как положительные, так и отрицательные значения.
Виды движения по окружности
Угловое движение можно условно разделить на два вида:
- Когда изменяется только направление вектора линейной скорости, а его длина не изменяется.
- Или, когда изменяются обе характеристики вектора линейной скорости.
Во втором случае, для описания движения будем применять более сложные формулы кинематики. Так как появится еще один вид ускорения.
Центростремительное (нормальное) ускорение есть всегда, когда есть движение по окружности, при этом не важно, меняется ли скорость тела по модулю, или не меняется.
Движение по окружности с постоянной по модулю скоростью
Пусть тело движется по окружности, но при этом длина вектора линейной скорости не меняется (рис. 1).
\[\left|\vec

На рисунке 1 указаны: а) – вид сбоку, б) вид сверху, вектор угловой скорости направлен к нам перпендикулярно рисунку.
Скорость будет меняться только по направлению от точки к точке, потому, что на тело действует центростремительная сила \(\displaystyle \vec
Кроме линейной, тело обладает угловой скоростью. Если линейная скорость не изменяется по модулю, то длина вектора угловой скорости не меняется.
На рисунке 1а изображен вектор угловой скорости \(\displaystyle \vec<\omega>\), на рисунке 1б вектор угловой скорости направлен к нам перпендикулярно плоскости рисунка. Направление, в котором тело движется по окружности, указано синей стрелкой.
Тангенциальное ускорение – когда модуль скорости меняется
Тело может увеличивать или уменьшать свою скорость, когда движется по окружности.
В таком случае, дополнительно к нормальному ускорению возникает тангенциальное \(\displaystyle \vec
Тангенциальное ускорение играет роль линейного ускорения при прямолинейном движении тела. Вектор \(\displaystyle \vec
Подобно движению по прямой, вектор ускорения – это первая производная скорости по времени, или вторая производная перемещения по времени.
Когда векторы скорости \(\vec

А когда ускорение \(\vec

С линейной скоростью \(\vec
Из рисунков 2, 3 следует: когда появляется тангенциальное ускорение, меняется и угловая скорость. Значит, тангенциальное ускорение \(\vec
Связь между тангенциальным и угловым ускорением выглядит аналогично связи между линейной и угловой скоростью.
В векторном виде
В скалярном виде
\[ \large \boxed < a_<\tau>= \beta \cdot R >\]
\(\displaystyle \vec <\beta>\left( \frac<\text<рад>>
\(\displaystyle \vec< a_<\tau>> \left( \frac<\text<м>>
\(R \left( \text<м>\right)\) – радиус окружности.
Равноускоренное движение по окружности
Угловая скорость увеличивается (рис. 2), когда угловое ускорение сонаправлено с вектором угловой скорости. Когда движение происходит с постоянным ускорением, его называют равноускоренным.
Для решения задач на равноускоренное движение по окружности, поступаем аналогично равноускоренному движению по прямой. Применяем систему из двух уравнений:
\[ \large \boxed < \begin
Первое уравнение системы – это связь между начальной \(\omega_ <0>\) и конечной \(\omega \) скоростью. Второе уравнение – это уравнение движения.
Равнозамедленное движение по окружности
Когда векторы \(\vec<\beta>\) и \(\vec<\omega>\) направлены в противоположные стороны, угловая скорость \(\vec<\omega>\) уменьшается (рис. 3).
Для решения задач кинематики, в которых угловая скорость уменьшается и, движение равнозамедленное, используем систему, состоящую из таких уравнений:
\[ \large \boxed < \begin
Общее ускорение при движении по окружности
Пусть точка движется по окружности и линейная \(\vec
Примечание: Любое ускорение, обозначаемое символом «a», измеряется в метрах, деленных на секунду в квадрате.

Направление вектора общего ускорения указано на рисунке 4а, а для равнозамедленного – на рисунке 4б.
Так как векторы \(\vec
http://zaochnik.com/spravochnik/fizika/kinematika/ravnouskorennoe-dvizhenie/
http://formulki.ru/mehanika/vidy-dvizheniya-po-okruzhnosti