Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Уравнения электрического равновесия цепей
Содержание:
Уравнения электрического равновесия цепей:
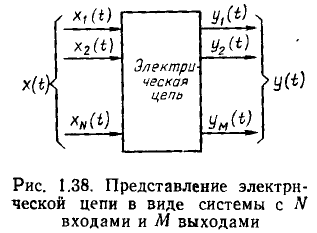
Любую электрическую цепь можно рассматривать как систему с одним или несколькими входами и одним или несколькими выходами (рис. 1.38). Если к входам цепи приложить внешнее воздействие 
Задача анализа электрической цепи состоит в определении реакции цепи у (t) на заданное внешнее воздействие х (t).
Задача синтеза цепи заключается в нахождении цепи по заданной реакции цепи у (t) на некоторое внешнее воздействие х (t).
Исходными данными в задаче анализа являются эквивалентная схема цепи с параметрами всех входящих в нее элементов и описание внешнего воздействия х (t), задаваемого в виде совокупности токов и напряжений идеализированных неуправляемых источников. В результате анализа определяется отклик у (t) в виде совокупности токов и напряжений всех или некоторых ветвей цепи. В частном случае задача анализа может сводиться к определению соотношений между реакциями цепи на отдельных выходах  и воздействиями
и воздействиями  приложенными к определенным входам. Такие соотношения называются характеристиками (системными функциями, функциями) цепи. В зависимости от того, какая величина— частота или время — является аргументом в выражениях, описывающих соотношения между откликом и внешним воздействием, различают частотные и временные характеристики цепи. Определение и исследование частотных характеристик представляют собой задачу анализа цепи в частотной области; нахождение временных характеристик — задачу анализа цепи во временной области.
приложенными к определенным входам. Такие соотношения называются характеристиками (системными функциями, функциями) цепи. В зависимости от того, какая величина— частота или время — является аргументом в выражениях, описывающих соотношения между откликом и внешним воздействием, различают частотные и временные характеристики цепи. Определение и исследование частотных характеристик представляют собой задачу анализа цепи в частотной области; нахождение временных характеристик — задачу анализа цепи во временной области.
Исходными данными в задаче синтеза являются описания внешнего воздействия х (t) и ее отклика у (t). В результате синтеза необходимо найти эквивалентную схему цепи и параметры всех входящих в нее элементов. В частном случае задача синтеза может сводиться к нахождению цепи, обеспечивающей заданные соотношения между внешним воздействием на цепь  и ее реакцией
и ее реакцией  т. е. к нахождению цепи по ее характеристикам.
т. е. к нахождению цепи по ее характеристикам.
Анализ и синтез электрических цепей в определенной степени взаимосвязаны, в частности методы синтеза базируются на использовании общих свойств характеристик различных классов цепей, которые изучаются в процессе анализа. Поэтому изложению методов синтеза цепей будет предшествовать рассмотрение общих методов анализа цепей и знакомство с характеристиками некоторых классов цепей при различных внешних воздействиях.
Понятие об уравнениях электрического равновесия
Математически задача анализа электрической цепи сводится к составлению и решению системы линейно независимых уравнений, в которых в качестве неизвестных фигурируют токи и напряжения ветвей исследуемой цепи. Уравнения, решение которых позволяет определить токи и напряжения ветвей электрической цепи, называются уравнениями электрического равновесия цепи. Очевидно, что число уравнений электрического равновесия должно быть равно количеству неизвестных токов и напряжений.
В общем случае в цепи, содержащей р ветвей и q узлов, имеется 2р неизвестных токов и напряжений ветвей. Используя законы Кирхгофа, для такой цепи можно составить m = q— 1 независимых уравнений баланса токов и n = р — q + 1 независимых уравнений баланса напряжений. В сочетании с компонентными уравнениями (уравнениями ветвей) получаем 2р линейно независимых уравнений, что достаточно для определения неизвестных токов и напряжений ветвей.
Если в рассматриваемой цепи имеется  ветвей, в которых содержатся идеализированные источники тока (токи этих ветвей заданы, а напряжения неизвестны), и
ветвей, в которых содержатся идеализированные источники тока (токи этих ветвей заданы, а напряжения неизвестны), и  ветвей, составленных только из идеализированных источников напряжения (напряжения этих ветвей известны), то общее число неизвестных токов и напряжений уменьшается до
ветвей, составленных только из идеализированных источников напряжения (напряжения этих ветвей известны), то общее число неизвестных токов и напряжений уменьшается до  Для определения этих неизвестных нужно составить лишь
Для определения этих неизвестных нужно составить лишь  линейно независимых уравнений (m + n = р уравнений на основании законов Кирхгофа и
линейно независимых уравнений (m + n = р уравнений на основании законов Кирхгофа и 
 компонентных уравнений для ветвей, не содержащих указанных источников).
компонентных уравнений для ветвей, не содержащих указанных источников).
Таким образом, используя компонентные уравнения и топологические уравнения, составленные на основании законов Кирхгофа, всегда можно сформировать систему уравнений электрического равновесия, число уравнений в которой достаточно для определения всех неизвестных токов и напряжений. Будем называть такую систему уравнений основной системой уравнений электрического равновесия цепи.
На практике для анализа цепей используют различные методы составления уравнения электрического равновесия, в частности методы токов ветвей, напряжений ветвей, контурных токов, узловых напряжений, переменных состояния. Все они базируются на использовании различных приемов, позволяющих преобразовать основную систему уравнений электрического равновесия и уменьшить по сравнению с 2р или  число одновременно решаемых уравнений.
число одновременно решаемых уравнений.
Как было показано ранее, уравнения (1.37) и (1.40) являются алгебраическими, а компонентные уравнения идеализированных пассивных элементов могут быть как алгебраическими (1.9), (1.10), так и дифференциальными (1.13), (1.22) или интегральными (1.16), (1.23).
Вследствие этого уравнения электрического равновесия цепи, составленные любым методом, представляют собой в общем случае систему интегродифференциальных уравнений.
Пример 1.7.
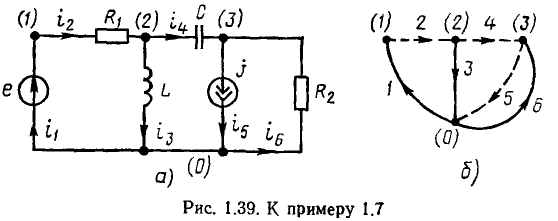
Составим основную систему уравнений электрического равновесия цепи, схема и топологический граф которой изображены на рис. 1.39, а и б соответственно. Для этой цепи р=6, q = 4,  — 1 и
— 1 и  = 1. Общее число неизвестных токов и напряжений ветвей
= 1. Общее число неизвестных токов и напряжений ветвей  Используя законы Кирхгофа, можно составить m = q — 1 = 3, уравнения баланса токов:
Используя законы Кирхгофа, можно составить m = q — 1 = 3, уравнения баланса токов:

 3 уровня баланса напряжений:
3 уровня баланса напряжений:

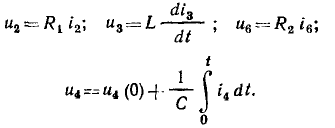
Кроме того, имеем  уравнений ветвей, нес одержащих идеализированных источников:
уравнений ветвей, нес одержащих идеализированных источников:
В результате получаем систему из 10 линейно независимых уравнений для определения 10 неизвестных токов и напряжений: 

Система уравнений электрического равновесия цепи, составленная любым методом, может быть путем дифференцирования и последовательного исключения неизвестных сведена к одному дифференциальному уравнению для любого из неизвестных токов и напряжений, называемому дифференциальным уравнением цепи. В частном случае это может быть алгебраическое уравнение, которое можно рассматривать как дифференциальное уравнение нулевого порядка. Дифференциальное уравнение цепи содержит фундаментальную информацию о характере имеющих место в цепи электрических процессов и является основой для классификации электрических цепей.Тип дифференциального уравнения цепи полностью определяется ее топологией и характером входящих в нее идеализированных элементов.
Пример 1.8.
Применяя указанные преобразования к основной системе уравнений электрического равновесия цепи (рис. 1.39, а), получим дифференциальное уравнение этой цепи, составленное относительно напряжения 

Здесь  —постоянные коэффициенты, определяемые параметрами пассивных элементов цепи;
—постоянные коэффициенты, определяемые параметрами пассивных элементов цепи;
 — Функция времени, определяемая параметрами независимых источников напряжения и тока.
— Функция времени, определяемая параметрами независимых источников напряжения и тока.
Таким образом, уравнение цепи, изображенной на рис. 1.39, является линейным неоднородным дифференциальным уравнением 2-го порядка с постоянными коэффициентами
Классификация электрических цепей
Электрические цепи, составленные из идеализированных элементов, могут быть классифицированы по ряду признаков:
по топологическим особенностям: планарные (плоские) и непланарные (объемные), разветвленные и неразветвленные, простейшие (одноконтурные, двухузловые) и сложные (многоконтурные, многоузловые);
по энергетическим свойствам: активные (содержащие идеализированные активные элементы) и пассивные (не содержащие идеализированных активных элементов);
по числу внешних выводов: двухполюсники и многополюсники; и др.
Классификация цепей по этим признакам не носит принципиального характера и используется, в основном, с целью упорядочения терминологии.
Фундаментальный характер имеет классификация цепей в зависимости от вида дифференциального уравнения цепи. Идеализированные электрические цепи, процессы в которых описываются обыкновенными дифференциальными уравнениями, называются цепями с сосредоточенными параметрами. Цепи такого типа используют в качестве упрощенных моделей реальных электрических цепей и их элементов на сравнительно низких частотах, когда длина волны электромагнитных колебаний существенно больше размеров исследуемого устройства. При этих условиях в исследуемых устройствах и их элементах удается выделить конечное число’ участков, в которых преобладает какой-то один из основных эффектов — запасание энергии электрического или магнитного полей, преобразование электрической энергии в другие виды энергии или преобразование энергии сторонних сил в электрическую. Токи рассматриваемой реальной цепи, являясь функциями времени, имеют одинаковые мгновенные значения в пределах каждого из выделенных участков. Заменяя эти участки идеализированными активными или пассивными элементами, получают идеализированную цепь, содержащую конечное число элементов, значения параметров которых конечны.
Таким образом, цепи с сосредоточенными параметрами представляют собой идеализированные цепи, моделирующие реальные устройства или их элементы при условиях, когда можно предположить, что каждый из основных электрических эффектов сосредоточен в конечном числе пространственно локализуемых областей.
Когда длина волны электромагнитных колебаний соизмерима с размерами исследуемого устройства или его элементов, пространственно локализовать области, в которых сосредоточены только эффекты одного типа, не удается. Это связано с тем, что даже при бесконечно малой длине выделяемых участков, в пределах каждого из них имеют место одновременно несколько из перечисленных основных эффектов, причем значения токов в пределах выделенных участков изменяются от одного сечения к другому.
При этих условиях цепи, моделирующие реальные устройства или их элементы, содержат бесконечно большое число идеализированных элементов, параметры которых имеют бесконечно малые значения. Процессы в таких цепях описываются дифференциальными уравнениями в частных производных. Идеализированные электрические цепи, процессы в которых описываются дифференциальными уравнениями в частных производных, называются цепями с распределенными параметрами.
Следует подчеркнуть, что термины «цепь с распределенными параметрами» и «цепь с сосредоточенными параметрами» применимы только к идеализированным (моделирующим) цепям и не должны использоваться для характеристики реальных цепей.
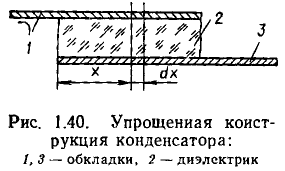
В зависимости от условий и требуемой точности исследования каждый элемент реальной цепи и, следовательно, каждая реальная цепь в целом могут быть заменены моделирующей цепью с сосредоточенными или распределенными параметрами. Например, конденсатор любого типа конструктивно представляет собой две проводящие обкладки 1 и 3, разделенные слоем диэлектрика 2 (рис. 1.40). В области частот, когда длина волны электромагнитных колебаний значительно превышает геометрические размеры обкладок, он может быть представлен одной из моделирующих цепей с сосредоточенными параметрами, схемы которых приведены на рис. 1.11. На более высоких частотах, когда длина волны электромагнитных колебаний сравнима с геометрическими размерами обкладок, но существенно больше расстояния между ними, необходимо учитывать, что процессы запасания энергии электрического и магнитного полей, а также необратимое преобразование электрической энергии в другие виды энергии имеют место вдоль всей длины обкладок конденсатора. В этом случае эквивалентная схема элементарного участка конденсатора длиной dx состоит из индуктивности  и емкости
и емкости  характеризующих процессы запасания энергии магнитного и электрического полей, а также сопротивления
характеризующих процессы запасания энергии магнитного и электрического полей, а также сопротивления  и проводимости утечки
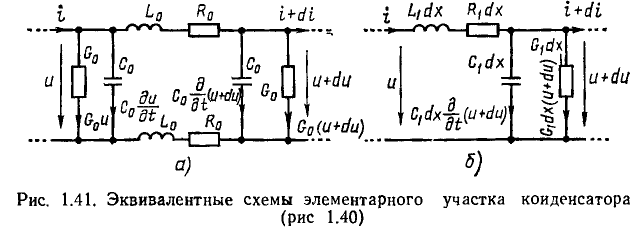
и проводимости утечки  учитывающих потери энергии в конденсаторе (рис. 1.41, а). Эквивалентная схема всего конденсатора должна состоять из бесконечно большого числа таких секций. Следовательно, идеализированная цепь, моделирующая конденсатор в рассматриваемом диапазоне частот, представляет собой цепь с распределенными параметрами.
учитывающих потери энергии в конденсаторе (рис. 1.41, а). Эквивалентная схема всего конденсатора должна состоять из бесконечно большого числа таких секций. Следовательно, идеализированная цепь, моделирующая конденсатор в рассматриваемом диапазоне частот, представляет собой цепь с распределенными параметрами.
На примере цепи, эквивалентная схема которой изображена на рис. 1.41, а, покажем, что электрические процессы в цепях с распределенными параметрами описываются дифференциальными уравнениями в частных производных. Действительно, ток i = i (х, t) и напряжение u = u (х, t) рассматриваемой цепи являются функциями времени t и координаты х.
Приращения тока и напряжения на участке цепи длиной dx
Полагая, что параметры элементов моделирующей цепи 
 не зависят от токов и напряжений и выражая их через погонные (т. е. приходящиеся на единицу длины) параметры
не зависят от токов и напряжений и выражая их через погонные (т. е. приходящиеся на единицу длины) параметры 

составим уравнения баланса токов и напряжений элементарного участка цепи:
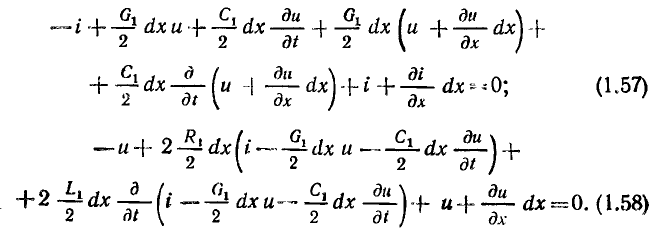
Пренебрегая величинами второго порядка малости, уравнения (1.57), (1.58) можно преобразовать к виду
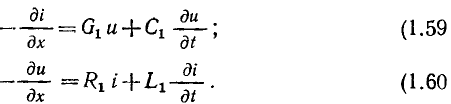
Решая уравнения (1.59), (1.60) при соответствующих начальных граничных условиях, можно определить токи и напряжения цепи моделирующей коденсатор в рассматриваемом режиме.
Отметим, что уравнениям (1.59), (1.60) может быть поставлена в соответствие более простая эквивалентная схема элементарного участка цепи (рис. 1.41, б). Аналогичный вид имеют высокочастотные схемы замещения и ряда других элементов, входящих в состав радиоэлектронных устройств, в частности двухпроводных и коаксиальных линий передачи.
В зависимости от числа координат, вдоль которых происходит изменение тока и напряжения и вдоль которых «распределены» параметры цепи, различают одномерные, двухмерные и трехмерные цепи с распределенными параметрами. В теории цепей рассматривают, в основном, одномерные цепи с распределенными параметрами, процессы в которых описываются дифференциальными уравнениями типа (1.59), (1.60).
Параметры рассмотренных ранее идеализированных линейных пассивных элементов не зависят от значений токов и напряжений соответствующих элементов и, следовательно, от интенсивности внешнего воздействия на цепь, определяемой токами действующих в цепи независимых источников тока и напряжениями действующих в цепи независимых источников напряжения. Связь между током и напряжением линейных идеализированных пассивных элементов описывается линейными алгебраическими, дифференциальными или интегральными уравнениями, иными словами, компонентные уравнения этих элементов являются линейными.
Параметры нелинейных пассивных элементов зависят от токов или напряжений соответствующих элементов, а следовательно, и от интенсивности внешнего воздействия. Компонентные уравнения нелинейных идеализированных пассивных элементов — нелинейные.
В зависимости от вида компонентного уравнения идеализированные активные элементы также делятся на линейные и нелинейные. К линейным идеализированным активным элементам относят независимые в линейно управляемые зависимые источники тока и напряжения, к нелинейным — нелинейно управляемые зависимые источники тока г напряжения.
Цепь с сосредоточенными или распределенными параметрами, составленная только из линейных идеализированных элементов, называется линейной. Дифференциальное уравнение такой цепи — линейное. Если в состав цепи входит хотя бы один нелинейный пассив ими или активный элемент, то она называется нелинейной, а процессы в ней описываются нелинейными дифференциальными уравнениями.
Параметры линейных идеализированных пассивных элементов и коэффициенты управления линейно управляемых источников могут либо иметь постоянные значения, либо изменяться во времени под действием некоторых факторов, непосредственно не связанных с токами или напряжениями этих элементов (например, емкость конденсатора может изменяться во времени вследствие изменения расстояния между обкладками; индуктивность катушки можно изменять путем перемещения сердечника). Идеализированные элементы первого типа называют линейными элементами с постоянными параметрами, элементы второго типа — линейными элементами с переменными параметрами. Параметрические изменение параметров происходит с частотой. линейным а м а элементы, у близкой к частоте токов или напряжений этих элементов, следует отличать от регулируемых элементов —конденсаторов переменной емкости, вариометров, подстроечных конденсаторов и др., у которых изменение параметров производится весьма медленно и только в процессе настройки или регулировки соответствующего устройства.
При составлении уравнений электрического равновесия параметрам регулируемых элементов приписывают некоторые фиксированные значения, а сами элементы относят к элементам с постоянными параметрами.
Цепи, составленные только из линейных элементов с постоянными параметрами, называются линейными цепями с постоянными параметрами или линейными инвариантными во времени цепями. Процессы в линейных инвариантных во времени цепях описываются линейными уравнениями с постоянными коэффициентами.
Линейные цепи, содержащие хотя бы один элемент с переменными параметрами, называются линейными параметрическими цепями. Процессы в линейных параметрических цепях описываются линейными уравнениями с переменными коэффициентами.
В общем случае дифференциальное уравнение линейной цепи с сосредоточенными параметрами имеет следующий вид:

где у — искомая реакция цепи (ток или напряжение какой-либо ветви);  — коэффициенты, определяемые параметрами пассивных элементов и коэффициентами управления управляемых источников. В дифференциальном уравнении линейной инвариантной во времени цепи эти коэффициенты постоянны, в дифференциальном уравнении линейной параметрической цепи, по крайней мере, один из них является функцией времени.
— коэффициенты, определяемые параметрами пассивных элементов и коэффициентами управления управляемых источников. В дифференциальном уравнении линейной инвариантной во времени цепи эти коэффициенты постоянны, в дифференциальном уравнении линейной параметрической цепи, по крайней мере, один из них является функцией времени.
Правая часть уравнения (1.61) есть линейная комбинация функций, описывающих внешнее воздействие на цепь х (t), и их производных. При выключении всех источников она становится равной нулю.
Значение v характеризует порядок сложности цепи (порядок цепи) и равно числу реактивных элементов (емкостей и индуктивностей), энергетическое состояние которых может быть задано независимо (подробнее этот вопрос будет рассмотрен в гл. 6). Различают цепи нулевого порядка (не содержащие реактивных элементов), первого, второго и более высоких порядков.
Для линейных уравнений вида (1.61) сформулирована теорема наложения (теорема суперпозиции). Если f(t)  где
где  являются решениями уравнений
являются решениями уравнений
 то
то  является решением уравнения (1.61).
является решением уравнения (1.61).
Математически это значит, что решение линейного уравнения (1.61) со сложной правой частью можно выразить через решения уравнений (1.62) с более простой правой частью.
На теореме наложения базируется широко используемый в теории цепей принцип наложения (принцип суперпозиции): реакция у (t) линейной цепи на сложное воздействие х (t) представляющее собой линейную комбинацию более простых воздействий
представляющее собой линейную комбинацию более простых воздействий  равна линейной комбинации реакций
равна линейной комбинации реакций  вызванных каждым из простых воздействий в отдельности, у (t)
вызванных каждым из простых воздействий в отдельности, у (t)  В частности, если внешним воздействиям
В частности, если внешним воздействиям  соответствуют реакции
соответствуют реакции  то внешнему воздействию х (t)
то внешнему воздействию х (t)  соответствует реакция
соответствует реакция  а внешнему воздействию
а внешнему воздействию  где А = const, реакция у(t) =
где А = const, реакция у(t) =  Применение принципа наложения существенно облегчает исследование процессов в линейных электрических цепях, он лежит в основе многих широко используемых методов анализа.
Применение принципа наложения существенно облегчает исследование процессов в линейных электрических цепях, он лежит в основе многих широко используемых методов анализа.
Состояние теории цепей в значительной степени определяется степенью разработанности теории и методов решения соответствующих дифференциальных уравнений. К настоящему времени разработаны общие методы решения только линейных дифференциальных уравнений с постоянными коэффициентами, поэтому наиболее законченный вид имеет теория линейных инвариантных во времени цепей, которые в дальнейшем будем называть просто линейными цепями.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Линейные цепи при гармоническом воздействии
- Нелинейные резистивные цепи
- Преобразование схем электрических цепей
- Установившиеся процессы в линейных электрических цепях
- Линии с распределенными параметрами
- Идеализированные пассивные элементы
- Идеализированные активные элементы
- Топологии электрических цепей
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Уравнение равновесия напряжений фазы обмотки якоря неявнополюсного СГ.
Уравнение равновесия напряжений фазы обмотки якоря явнополюсного СГ.
Уравнение равновесия напряжений СГ выглядит:

Здесь Е0 – ЭДС в фазе статора наводимая потоком обмотки возбуждения
Ead – ЭДС индуцируемая в обмотке якоря потоком продольной реакции якоря Фad
Eaq — ЭДС индуцируемая в обмотке якоря потоком поперечной реакции якоря Фaq
Eas — ЭДС рассеяния индуцируемая в фазе обмотке якоря потоком рассеяния обмотки якоря Фas
ra – активное сопротивление фазы обмотки якоря
Уравнение равновесия напряжений фазы обмотки якоря неявнополюсного СГ.
Уравнение равновесия напряжений СГ выглядит:

Здесь Е0 – ЭДС в фазе статора наводимая потоком обмотки возбуждения
 — индуктивное сопротивление рассеяния фазы обмотки статора
— индуктивное сопротивление рассеяния фазы обмотки статора
 — индуктивное сопротивление продольной реакции якоря в следствии равномерности воздушного зазора
— индуктивное сопротивление продольной реакции якоря в следствии равномерности воздушного зазора 
ra – активное сопротивление фазы обмотки якоря
6. Векторные диаграммы синхронного генератора.


7. Характеристика холостого хода синхронного генератора.

8. Внешняя характеристика синхронного генератора.

9. Регулировочная характеристика синхронного генератора.

10. Характеристика 3-х фазного короткого замыкания синхронного генератора.
 Характеристика трехфазного короткого замыкания представляет собой зависимость тока якоря при коротком замыкании от тока возбуждения IK= f(IB) при n=const (1!!)
Характеристика трехфазного короткого замыкания представляет собой зависимость тока якоря при коротком замыкании от тока возбуждения IK= f(IB) при n=const (1!!)
11. Параллельная работа синхронных генераторов.
В том случае, когда мощность потребителя становится больше номинальной мощности работающего генератора, параллельно ему включают другой генератор.
Для включения синхронного генератора на параллельную работу с электрической сетью или другим, уже работающим синхронным генератором необходимо выполнить следующие условия:
напряжение подключаемой машины должно быть равно напряжению сети или работающей машины;
частота подключаемого генератора должна быть равна частоте сети;
напряжения всех фаз подключаемой машины должны быть противоположны (по фазе) напряжениям соответствующих фаз сети или работающей машины;
для подключения на параллельную работу трехфазного синхронного генератора необходимо также обеспечить одинаковое чередование фаз подключаемой машины и сети.
12. Угловая характеристика синхронного двигателя.
При холостом ходе двигателя оси ротора и статора совпадают,q= 0, соответственно M= 0,P= 0. С увеличением момента сопротивления нагрузки на валу ротор отстает от магнитного поля, а электрическая мощность P и электромагнитный момент M возрастают. Причем, в отличие от генераторного режима, M является полезным моментом, вращающим вал ротора, а активная мощность теперь потребляется двигателем от сети. При изменении угла q от 0 до +90°двигатель работает устойчиво. Если еще увеличить момент сопротивления нагрузки, то уголqпревысит значение +90°, а M,P начнут уменьшаться. При этом ротор начнет вращаться несинхронно с магнитным полем. Тогда двигатель перестанет работать параллельно с сетью —выпадет из синхронизма, что может вызвать нежелательные явления и рассматриваться как аварийный режим.

13. Механическая характеристика синхронного двигателя.

14. Способы синхронного генератора с сетью. Есть 2 способа.
1 При включении синхронного генератора на параллельную работу с сетью по способу точной синхронизации стремятся к тому, чтобы при включении не возникало больших бросков тока. Большие толчки тока вызывают большие моменты, действующие как на ротор, так и на статор, и силы, которые могут привести к разрушению обмотки статора.
2 При самосинхронизации неизбежно возникновение значительного толчка тока, так как включение невозбужденного генератора в сеть с напряжением UС, эквивалентно внезапному короткому замыканию этого генератора при работе на холостом ходу с Е0=UС.Однако толчок тока при самосинхронизации будет все же меньше, так как, кроме сопротивления генератора, в цепи будут действовать также сопротивления элементов сети (повышающие трансформаторы, линия и т. д.).
15. U – образная характеристика синхронного генератора.
Предположим, что генератор после подключения на сеть работает без нагрузки и его ЭДС  уравновешивает напряжение сети
уравновешивает напряжение сети  . Е этом увеличить ток в обмотке возбуждения, т. е. перевозбудитьмашину, то ЭДС
. Е этом увеличить ток в обмотке возбуждения, т. е. перевозбудитьмашину, то ЭДС  увеличится до значения
увеличится до значения  и в цепи генератора появится избыточная ЭДС
и в цепи генератора появится избыточная ЭДС  (рис. 21.10, а),вектор которой совпадает по направлению с вектором ЭДС . Ток
(рис. 21.10, а),вектор которой совпадает по направлению с вектором ЭДС . Ток  , вызванный ЭДС
, вызванный ЭДС  , будет отставать от нее по фазе на 90° (поскольку
, будет отставать от нее по фазе на 90° (поскольку  ). По отношению к ЭДС этот ток также будет отстающим (индуктивным). С увеличением перевозбуждения значение реактивного (индуктивного) тока увеличится.
). По отношению к ЭДС этот ток также будет отстающим (индуктивным). С увеличением перевозбуждения значение реактивного (индуктивного) тока увеличится.
Если же после того, как генератор подключен к сети, уменьшить ток возбуждения, т. е. недовозбудить машину, то ЭДС уменьшится до значения  и в цепи генератора опять будет действовать избыточная ЭДС
и в цепи генератора опять будет действовать избыточная ЭДС  . Теперь вектор этой ЭДС будет совпадать по направлению с вектором напряжения сети (рис. 21.10, б), и поэтому ток , вызванный этой ЭДС и отстающим от нее по фазе на 90°, будет опережающим (емкостным) по отношению к ЭДС генератора .
. Теперь вектор этой ЭДС будет совпадать по направлению с вектором напряжения сети (рис. 21.10, б), и поэтому ток , вызванный этой ЭДС и отстающим от нее по фазе на 90°, будет опережающим (емкостным) по отношению к ЭДС генератора .

Это сопровождается появлением в обмотке статора реактивного тока  , которым по отношению к ЭДС является отстающим (индуктивным). Вы званная этим током продольно-размагничивающая реакция якоря компенсирует избыточную МДС возбуждения так, что ЭДС генератора остается неизменной. Такой же процесс происходит и при недовозбуждении генератора с той лишь разницей, что в обмотке появляется опережающий (емкостный) ток , а вызванная этим током продольно-намагничивающая реакция якоря компенсирует недостающую МДС возбуждения.
, которым по отношению к ЭДС является отстающим (индуктивным). Вы званная этим током продольно-размагничивающая реакция якоря компенсирует избыточную МДС возбуждения так, что ЭДС генератора остается неизменной. Такой же процесс происходит и при недовозбуждении генератора с той лишь разницей, что в обмотке появляется опережающий (емкостный) ток , а вызванная этим током продольно-намагничивающая реакция якоря компенсирует недостающую МДС возбуждения.

16. Пуск синхронных двигателей.
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя. Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами раскрутить другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
17. Сравнение синхронных и асинхронных двигателей.
Чтобы остановить выбор на синхронном или асинхронном двигателе для приведения во вращение того или иного производственного механизма, необходимо иметь в виду следующее.
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами,. Использование некоторых из этих способов для регулирования частоты вращения синхронных двигателей в принципе невозможно, а некоторых связано с большими конструктивными и эксплуатационными трудностями. Учитывая это, следует иметь в виду, что синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cos φ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представлет собой активно-индуктивную нагрузку и имеет всегда cos φ
http://www.evkova.org/uravneniya-elektricheskogo-ravnovesiya-tsepej
http://poisk-ru.ru/s15318t7.html