Равновесие тела под действием пространственной системы сил
Содержание:
Для равновесия твердого тела, находящегося под действием произвольной пространственной системы сил,необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно произвольного центра О были равны нулю.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Условия равновесия тела, находящегося под действием пространственной системы произвольных сил
Поскольку любую пространственную систему произвольных сил можно свести к одной силе — главного вектора  и одной пары — главного момента
и одной пары — главного момента  , приложенные к телу, то для равновесия тела необходимо и достаточно, чтобы главный вектор и главный момент одновременно равны нулю:
, приложенные к телу, то для равновесия тела необходимо и достаточно, чтобы главный вектор и главный момент одновременно равны нулю:

Причем, если = 0, то Rx = 0, Ry = 0 и Rz = 0, а если = 0, то Mx = 0, My = 0 и Mz = 0.
Проекции главного вектора на оси пространственной декартовой системы
координат равны

Проекции главного момента на эти же оси координат равны

Далее, с учетом уравнений, выражение можно окончательно представить в виде уравнений равновесия тела под действием пространственной системы произвольных сил:

На основании этих уравнений состоят конкретные уравнения равновесия тела.
Таким образом, для равновесия тела, находящегося под действием пространственной
системы произвольных сил, необходимо и достаточно, чтобы алгебраические суммы
проекций всех сил на оси пространственной декартовой системы координат и
алгебраические суммы моментов всех сел относительно этих осей равны нулю.
Условия равновесия тела, находящегося под действием пространственной системы параллельных сил

Если силы, приложенные к телу, расположенные в пространстве, но параллельны, то можно так выбрать систему координат, чтобы одна из осей (например, ось z) была параллельна данным силам (рис. 1.53). Тогда две другие оси (x, y) будут образовывать плоскость, которая будет перпендикулярной этим силам. Проекции заданных сил на оси x и y будут равны нулю. Как силы, параллельные оси, заданные силы не создают моментов относительно оси z.
Теперь, если принимать во внимание условия выше, то для пространственной системы параллельных сил три условия равновесия по данной системе выпадают, а остаются три другие. Итак, для равновесия пространственной системы параллельных сил имеем следующие уравнения равновесия:

Таким образом, для равновесия тела, находящегося под действием пространственной
системы параллельных сил, необходимо и достаточно, чтобы алгебраическая сумма
проекций всех сил на ось, которая параллельная силам, и алгебраические суммы
моментов относительно двух других осей равны нулю.
Теорема Вариньона о моменте равнодействующей силы относительно оси
Предположим, что есть тело, к которому приложена пространственная система
произвольных сил  .
.  ,
,  , .
, .  , что сведено к равнодействующей , которая приложена к телу в точке C (рис. 1.54). Приложим к точке C уравновешивающую
, что сведено к равнодействующей , которая приложена к телу в точке C (рис. 1.54). Приложим к точке C уравновешивающую
силу  , которая по модулю равна равнодействующей силе , расположенная с ней
, которая по модулю равна равнодействующей силе , расположенная с ней
на одной прямой, но имеет противоположное направление.
В этом случае тело, которое находится под действием системы сил . , , . и уравновешивающей силы , будет в состоянии равновесия, а это означает, что алгебраическая сумма моментов всех этих сил относительно любой оси декартовой системы координат должна равняться нулю. Возьмем сначала ось x и для нее запишем данное условие равновесия


Найдем из этого выражения момент силы относительно оси x. Он будет равняться

Поскольку модуль силы равен модулю силы , но они имеют противоположное направление, то = –. А это значит, что mx () = –mx (). Подставим значение этого момента, получим

Такие условия можно составить в отношении двух других осей.
Таким образом, если пространственная система произвольных сил сводится к
равнодействующей, то момент равнодействующей силы относительно произвольной оси равен алгебраической сумме моментов составляющих сил относительно этой же оси.
Пример равновесия тела под действием пространственной системы произвольных сил
Есть горизонтальный вал трансмиссии (рис. 1.55), который несет два шкивы C и D ременной передачи и может вращаться в подшипниках A и B. Радиусы шкивов равны rC = 0,2 м, rD = 0,25 м. Натяжения ветвей ремня на шкиве C — горизонтальные  и
и  , причем, = 2 = 4905 Н. Натяжения ветвей паса на шкиве D —
, причем, = 2 = 4905 Н. Натяжения ветвей паса на шкиве D —  и
и  , причем = 2 , с вертикалью они образуют угол α = 30º. Размеры вала равны: a = b = 0,5 м, с = 1 м.
, причем = 2 , с вертикалью они образуют угол α = 30º. Размеры вала равны: a = b = 0,5 м, с = 1 м.
Система находится в равновесии.
Определить натяжения и и реакции подшипников A и B.
Решение.
Рассмотрим равновесие вала AB со шкивами C и D. Освободим вал от связей, заменив их соответствующими реакциями. В подшипниках реакции расположены в плоскости, перпендикулярной оси вала AB. Таким образом, реакции подшипников A и B расположены соответственно в плоскости xAz и в плоскости, параллельной к ней и проходит через точку B. Неизвестный вектор каждой реакции подшипников в плоскости определяется двумя проекциями на оси x и z, как это показано на рис. 1.55. После сделанных
предположений, полученная пространственная система произвольных сил, находится в
состоянии равновесия.
Запишем на основании условий равновесия соответствующие уравнения равновесия пространственной системы произвольных сил.


Как видно из полученной системы уравнений равновесия, второе уравнение отсутствует, поскольку среди сил, приложенных к телу, нет таких, которые бы могли быть спроецированы на ось y (т. е. все силы лежат в плоскостях, перпендикулярных оси y). Однако, данная система является статически обозначенной, поскольку число неизвестных величин (t2, XA, ZA, XB, ZB) равно числу уравнений равновесия — 5.
Если подставить в данную систему уравнений числовые значения величин, заданные (учитывая, что по условию задачи = 2) и решить эти уравнения относительно неизвестных, получим следующие ответы:
Значения неизвестных величин XA и XB отрицательные, а это означает, что, фактически, эти реакции, которые показаны на рис. 1.55, имеют противоположное направление.
Для окончательного определения реакций подшипников в точках A и B необходимо добавить геометрически их составляющие. А именно

Услуги по теоретической механике:
Учебные лекции:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Условия равновесия тел
Равновесие тела
Тело находится в состоянии покоя (или движется равномерно и прямолинейно), если векторная сумма всех сил, действующих на него, равна нулю. Говорят, что силы уравновешивают друг друга. Когда мы имеем дело с телом определенной геометрической формы, при вычислении равнодействующей силы можно все силы прикладывать к центру масс тела.
Условие равновесия тел
Чтобы тело, которое не вращается, находилось в равновесии, необходимо, чтобы равнодействующая всех сил, действующий на него, была равна нулю.
F → = F 1 → + F 2 → + . . + F n → = 0 .
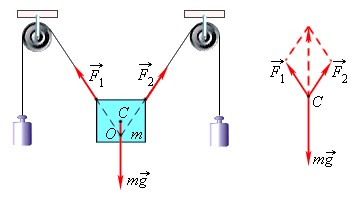
На рисунке выше изображено равновесие твердого тела. Брусок находится в состоянии равновесия под действием трех действующих не него сил. Линии действия сил F 1 → и F 2 → пересекаются в точке O . Точка приложения силы тяжести — центр масс тела C . Данные точки лежат на одной прямой, и при вычислении равнодействующей силы F 1 → , F 2 → и m g → приводятся к точке C .
Равновесие вращающегося тела. Правило моментов
Условия равенства нулю равнодействующей всех сил недостаточно, если тело может вращаться вокруг некоторой оси.
Плечом силы d называется длина перпендикуляра, проведенного от линии действия силы к точке ее приложения. Момент силы M — произведение плеча силы на ее модуль.
Момент силы стремится повернуть тело вокруг оси. Те моменты, которые поворачивают тело против часовой стрелки, считаются положительными. Единица измерения момента силы в международной системе CИ — 1 Н ь ю т о н м е т р .
Определение. Правило моментов
Если алгебраическая сумма всех моментов, приложенных к телу относительно неподвижной оси вращения, равна нулю, то тело находится в состоянии равновесия.
M 1 + M 2 + . . + M n = 0

В общем случае для равновесия тел необходимо выполнение двух условий: равенство нулю равнодействующей силы и соблюдение правила моментов.
Безразличное, устойчивое и неустойчивое равновесие
В механике есть разные виды равновесия. Так, различают устойчивое и неустойчивое, а также безразличное равновесие.
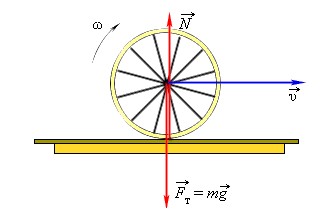
Типичный пример безразличного равновесия — катящееся колесо (или шар), которое, если остановить его в любой точке, окажется в состоянии равновесия.
Устойчивое равновесие — такое равновесие тела, когда при его малых отклонениях возникают силы или моменты сил, которые стремятся вернуть тело в равновесное состояние.
Неустойчивое равновесие — состояние равновесия, при малом отклонении от которого силы и моменты сил стремятся вывести тело из равновесия еще больше.
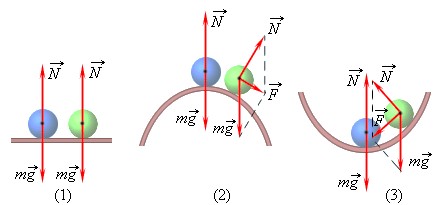
На рисунке выше положение шара (1) — безразличное равновесие, (2) — неустойчивое равновесие, (3) — устойчивое равновесие.
Тело с неподвижной осью вращения может находится в любом из описанных положений равновесия. Если ось вращения проходит через центр масс, возникает безразличное равновесие. При устойчивом и неустойчивом равновесии центр масс располагается на вертикальной прямой, которая проходит через ось вращения. Когда центр масс находится ниже оси вращения, равновесие является устойчивым. Иначе — наоборот.
Особый случай равновесия — равновесие тела на опоре. При этом упругая сила распределяется по всему основанию тела, а не проходит через одну точку. Тело покоится в равновесии, когда вертикальная линия, проведенная через центр масс, пересекает площадь опоры. Иначе, если линия из центра масс не попадает в контур, образованный линиями, соединяющими точки опоры, тело опрокидывается.
Пример равновесия тела на опоре — знаменитая Пизанская башня. По легенде с нее сбрасывал шары Галилео Галилей, когда проводил свои опыты по изучению свободного падения тел.
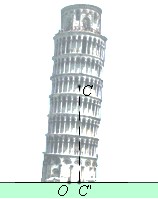
Линия, проведенная из центра масс башни пересекает основание приблизительно в 2,3 м от его центра.
Условия равновесия тел в физике — формулы и определение с примерами
Содержание:
Условия равновесия тел:
Основным признаком взаимодействия тел в динамике является возникновение ускорений. Однако часто бывает нужно знать, при каких условиях тело, на которое действует несколько сил, не движется с ускорением, а покоится или движется равномерно и прямолинейно. В последнем случае мы всегда можем выбрать другую инерциальную систему отсчета, в которой тело покоится, поэтому в дальнейшем будем изучать условия равновесия покоящихся тел.
Раздел механики, в котором изучаются условия равновесия тел, называется статикой.
Все опытные факты, которые мы рассмотрели в предыдущих параграфах, убеждают нас в том, что тело покоится, если равнодействующая всех сил, действующих на него, равна нулю.
Итак, первое условие равновесия тела: векторная сумма всех сил, приложенных к телу, равна нулю.
Если на тело действует n сил 
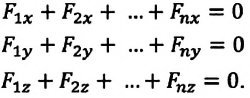
Из этого условия следует, что и сумма проекций всех сил на любое направление тоже должна быть равна нулю. В частности, сумма проекций сил на оси выбранной декартовой системы координат равна нулю:

Фактически эти три равенства эквивалентны одному векторному равенству ( 1 ). Но с их помощью достаточно просто решать задачи, поскольку проекции сил — скалярные величины.
В повседневной жизни и технике часто встречаются тела, которые не могут двигаться поступательно, но могут вращаться вокруг оси. Примерами таких тел могут служить двери и окна, качели, колеса машин и детали механизмов и т. д.
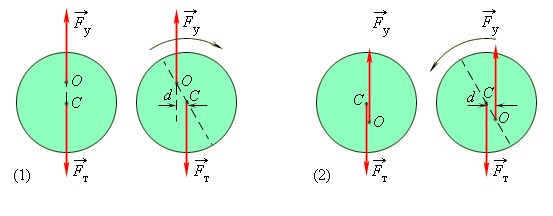
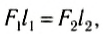
На рисунке 149, а изображен однородный диск, который может вращаться вокруг закрепленной оси, проходящей через его центр — точку О. Если подвесить к нему тело в точке А, то диск будет находиться в равновесии.
Естественно, что действующая сила  будет уравновешиваться силой упругости
будет уравновешиваться силой упругости  со стороны оси вращения. Если подвесить тело в точке В, то равновесие тоже не нарушится. Отсюда можно сделать вывод, что точку приложения силы натяжения можно переносить вдоль линии действия силы. При этом силы и лежат на одной прямой.
со стороны оси вращения. Если подвесить тело в точке В, то равновесие тоже не нарушится. Отсюда можно сделать вывод, что точку приложения силы натяжения можно переносить вдоль линии действия силы. При этом силы и лежат на одной прямой.
Если же прямая, на которой лежит вектор силы , не проходит через ось вращения, то эта сила не может быть уравновешена силой упругости оси, и тело поворачивается вокруг нее (рис. 149, б).
На рисунке 149, в изображен тот же диск, на который действуют две силы  и
и  . Численные значения этих сил определяются динамометрами. Сила вращает диск против часовой стрелки, а сила — по часовой стрелке. Диск не будет вращаться, если выполняется условие:
. Численные значения этих сил определяются динамометрами. Сила вращает диск против часовой стрелки, а сила — по часовой стрелке. Диск не будет вращаться, если выполняется условие:
 (2)
(2)
где l1 и l2 — кратчайшие расстояния от оси вращения до прямых, на которых лежат векторы сил и .
Итак, мы получили известное вам из курса физики 8-го класса условие равновесия рычага.
Кратчайшее расстояние от оси вращения до линии действия силы называется плечом силы, а произведение модуля силы F на плечо l называется моментом силы М:
M = Fl (3)
Из определения момента силы следует, что единицей его измерения в СИ является 1 ньютон-метр (1 H . м).
Рис. 149
Следовательно, равенство (2) означает равенство моментов сил F1 и F2. Но момент силы F1 вращает диск против часовой стрелки, а момент силы F2 — по часовой стрелке. Поэтому им нужно приписать различные знаки. Обычно положительным считают момент силы, вызывающий вращение по часовой стрелке, а отрицательным — момент силы, вызывающий вращение против часовой стрелки.
Если же на тело, закрепленное на оси, действуют n сил, то оно будет в равновесии, если алгебраическая сумма моментов сил будет равна нулю:
M1+ M2 + . +Mn = 0. (4)
Итак, вторым условием равновесия тела является правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех сил, приложенных к телу, относительно этой оси равна нулю.
Таким образом, тело будет находиться в равновесии, если выполняются два условия: (1) и (4). Например, доска, изображенная на рисунке 150, находится в равновесии.

Рис. 150
Главные выводы:
- Чтобы тело находилось в равновесии, векторная сумма всех сил, действующих на него, должна быть равна нулю.
- При равновесии тела сумма проекций всех сил, действующих на тело, на любое направление должна быть равна нулю.
- Точку приложения силы можно переносить вдоль линии действия силы.
- Вторым условием равновесия тела является равенство нулю алгебраической суммы моментов приложенных к телу сил.
Условия равновесия тел
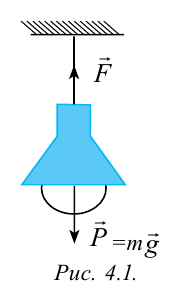
Рассмотрим силы, действующие на подвешенную к потолку лампу (рис. 4.1). Для начала вспомним изученное в 6-м классе понятие «центр масс» тела.
Центр масс – это воображаемая точка, в которой воплощена вся масса тела.
Исходя из этого будем считать, что силы, действующие на тело, приложены к центру масс. На подвешенную лампу действует направленная вниз сила тяжести  . При этом туго натягивается удерживающая ее нить. Возникающая в нити сила натяжения
. При этом туго натягивается удерживающая ее нить. Возникающая в нити сила натяжения  и сила тяжести
и сила тяжести  действуют вдоль одной прямой линии, которая проходит через центр массы и направлены противоположно. Эти силы равны по модулям. Если эти силы сложить по правилу сложения векторов, то результирующая сила становится равной нулю. Поэтому лампа остается в положении равновесия.
действуют вдоль одной прямой линии, которая проходит через центр массы и направлены противоположно. Эти силы равны по модулям. Если эти силы сложить по правилу сложения векторов, то результирующая сила становится равной нулю. Поэтому лампа остается в положении равновесия.
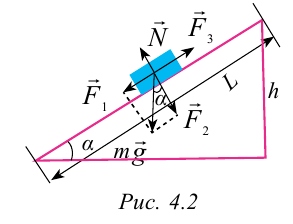
Рассмотрим случай, когда тело покоится в равновесии на наклонной плоскости (рис. 4.2). Рассмотрим действующие относительно центра масс силы в этом случае. На тело действует сила тяжести  .
.
Эту силу разделим на составляющие:  и
и  .
.
При этом сила  стремится сдвинуть тело вниз по наклонной плоскости, сила
стремится сдвинуть тело вниз по наклонной плоскости, сила  представляет силу давления на площадь наклонной плоскости. Эта сила приводит к образованию силы реакции
представляет силу давления на площадь наклонной плоскости. Эта сила приводит к образованию силы реакции  на тело со стороны наклонной плоскости. Также на тело действует сила трения
на тело со стороны наклонной плоскости. Также на тело действует сила трения  в противоположном относительно скольжения направлении.
в противоположном относительно скольжения направлении.
В этом случае векторная сумма всех действующих сил тоже будет равна нулю.
Исходя из вышесказанного можно сделать следующие выводы:
Для того чтобы тело или система тел, не имеющие вращения оси, остались в равновесии, векторная сумма всех действующих на них сил должна быть равна нулю.

Виды равновесия
Если некое тело находится в состоянии равновесия, это не означает, что оно постоянно будет находиться в таком состоянии (рис. 4.3). В реальных условиях тело подвергается неожиданным воздействиям извне, которые невозможно избежать. Главное, что нужно знать – останется ли тело после такого воздействия в равновесии или равновесие будет нарушено. Для этого необходимо учесть направление результирующей силы внешнего воздействия. В зависимости от направления результирующей силы различают три вида равновесия.
Устойчивое равновесие
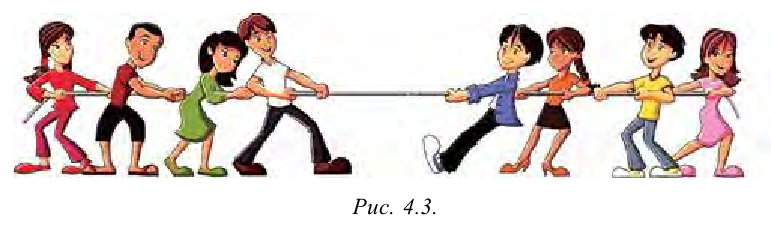
При выведении тела из положения равновесия возникают силы, возвращающие тело в прежнее положение, это называется устойчивым равновесием (рис. 4.4а). В данном случае, при небольшом смещении шарика, лежащего на дне сферического углубления, равнодействующая сила возвращает его в положение равновесия.
Неустойчивое равновесие
При выведении тела из положения равновесия возникают силы, удаляющие его от положения равновесия, это называется неустойчивым равновесием (рис. 4.4б). В данном случае шарик находится в верхней точке выпуклой сферической поверхности. При небольшом смещении из положения равновесия равнодействующая сила действующих на него сил удаляет его еще дальше от состояния равновесия.
Безразличное равновесие
Равновесие, при котором смещение тела в любом направлении не вызывает изменения действующих на него сил и равновесие тела сохраняется, называется безразличным равновесием (рисунок 4.4в). Если приложить силу к шарику, находящемуся на горизонтальной поверхности, то он переместится на другое место.
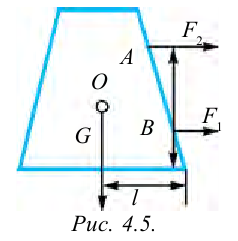
Если на тело, показанное на рисунке 4.5 действует сила  в точке
в точке  ниже центра тяжести (
ниже центра тяжести (  – сила трения), тело приходит в поступательное движение. Не меняя величину силы, приложим ее к точке
– сила трения), тело приходит в поступательное движение. Не меняя величину силы, приложим ее к точке  , при этом тело начинает наклоняться. Начинает уменьшаться расстояние
, при этом тело начинает наклоняться. Начинает уменьшаться расстояние  между крайними точками нижнего основания контура и вектором, направленным вниз из центра тяжести. Если продолжить прикладывать силу, вектор
между крайними точками нижнего основания контура и вектором, направленным вниз из центра тяжести. Если продолжить прикладывать силу, вектор  выйдет за пределы контура тела и оно опрокинется.
выйдет за пределы контура тела и оно опрокинется.
Таким образом, равновесие тела зависит от:
- 1) веса тела;
- 2) величины площади основания тела;
- 3) места приложения сил относительно центра тяжести.

Образец решения задачи
Тело массой 10 кг подвешено на двух нерастяжимых тросах. Они остаются в равновесном состоянии, образуя между собой угол равный 60 0 . Вычислите силу натяжения тросов.
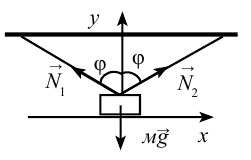
Согласно чертежу, действующие на груз силы  и
и  пересекаются в одной точке.
пересекаются в одной точке.
Следовательно, условие равновесия определяется двумя уравнениями:
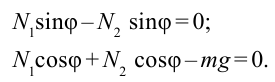
После внесения математических изменений получим: 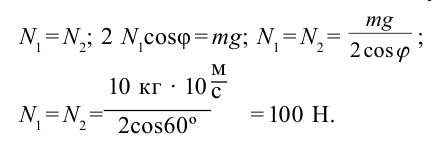
Ответ: 100 Н.
Определение условия равновесия тела
По I закону Ньютона, нахождение тела в состоянии равновесия означает, что оно находится в покое или движется прямолинейно и равномерно в инерциальной системе отсчета. Ознакомимся с условиями, при выполнении которых тело остается в состоянии равновесия.
Равновесие тела при поступательном движении
Поступательное движение тела можно рассматривать как движение одной его точки — движение центра массы. В этом случае для простоты можно принять, что вся масса тела сосредоточена в центре и равнодействующая сила, действующая на тело, прикладывается к этой точке. Из законов Ньютона знаем, что ускорение данной точки равно нулю тогда, когда равнодействующая сила (геометрическая сумма всех действующих сил), прикладываемая к этой точке, равна нулю. Это условие равновесия тела при поступательном движении:
Для нахождения тела в состоянии равновесия при его поступательном движении равнодействующая сила (геометрическая сумма всех действующих на тело сил), прикладываемая к телу, должна быть равна нулю:

Если геометрическая сумма сил равна нулю, то и сумма проекций этих сил на произвольную координатную ось равна нулю:
Равновесие тела с неподвижной осью вращения
На практике очень часто бывает, что при действии на тело с неподвижной осью вращения двух численно равных, но противоположно направленных параллельных сил, оно начинает вращаться вокруг этой оси. Например, блок, ворот и другие вращаются за счет таких параллельных сил. Значит, чтобы тело с неподвижной осью вращения находилось в состоянии равновесия, не достаточно, чтобы равнодействующая сила была равна нулю. Необходимо выполнение второго условия равновесия — правила моментов.
Тело с неподвижной осью вращения находится в равновесии, если алгебраическая сумма моментов действующих на него сил относительно оси вращения равна нулю:

| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Равновесие тел в физике
- Давление в жидкостях и газах в физике
- Закон Паскаля
- Закон Архимеда
- Явление самоиндукции
- Закон электромагнитной индукции
- ЭДС индукции в движущемся проводнике
- Производство, передача и потребление электрической энергии
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://zaochnik.com/spravochnik/fizika/elementy-statiki/uslovija-ravnovesija-tel/
http://www.evkova.org/usloviya-ravnovesiya-tel-v-fizike