Курсовая работа: Колебания маятника с различными механизмами затухания
Название: Колебания маятника с различными механизмами затухания Раздел: Рефераты по физике Тип: курсовая работа Добавлен 00:16:42 15 ноября 2009 Похожие работы Просмотров: 1834 Комментариев: 22 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать
Сейчас уже невозможно проверить легенду о том, как Галилей, стоя на молитве в соборе, внимательно наблюдал за качением бронзовых люстр. Наблюдал и определял время, затраченное люстрой на движение туда и обратно. Это время потом назвали периодом колебаний. Часов у Галилея не было, и, чтобы сравнить период колебаний люстр, подвешенных на цепях разной длины, он использовал частоту биения своего пульса.
Маятники используют для регулировки хода часов, поскольку любой маятник имеет вполне определенный период колебаний. Маятник находит также важное применение в геологической разведке. Известно, что в разных местах земного шара значения g различны. Различны они потому, что Земля — не вполне правильный шар. Кроме того, в тех местах, где залегают плотные породы, например некоторые металлические руды, значение g аномально высоко. Точные измерения g с помощью математического маятника иногда позволяют обнаружить такие месторождения.
Целью данной курсовой работы является изучение колебаний маятника с различными механизмами затухания на примерах физического и пружинного маятников, где физический маятник — тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, не проходящей через центр тяжести тела, а пружинный маятник может быть осуществлен в виде груза массой m и невесомой пружины жесткостью k.
Реализовать поставленную цель можно решив ряд задач:
— определение исходных теоретических положений;
— изучение и анализ литературы, посвященной данным проблемам;
Объектом данной курсовой работы является маятник. Предметом – колебания маятника с различными механизмами затухания.
Для решения постановленных задач использовались научные труды следующих авторов: Андронова А.А., Витта А.А., Хайкина С.Э., Анищенко В.С., Боголюбова Н.Н., Митропольского Ю.А., Владимирова С.Н., Майдановского А.С., Новикова С.С., Горелика Г.С., Дмитриева А.С., Кислова В.Я., Капранова М.В., Кулешева В.Н., Уткина Г.М., Ланда П.С., Мигулина В.В., Медведева В.И., Неймарка Ю.И., Рабиновича М.И., Трубецкова Д.И. и некоторых других.
1. Уравнения собственных затухающих колебаний маятника
1.1 Общие характеристики колебаний
Колебаниями называются процессы, которые характеризуются определенной повторяемостью во времени. Колебательные процессы широко распространены в природе и технике, например качания маятника часов, переменный электрический ток и т.д. При колебательном движении маятника изменяется координата центра масс, в случае переменного тока колеблются напряжение и сила тока. Физическая природа колебаний может быть разной, однако различные колебательные процессы описываются одинаковыми характеристиками и одинаковыми уравнениями.[1] Далее рассмотрим затухающие колебания.
Затухающими колебаниями называют собственные колебания, амплитуда А которых убывает со временем t по закону экспоненты А(t)=Аоexp (-?t) (? — показатель затухания из-за диссипации энергии благодаря силам вязкого трения для механических затухающих колебаний и омическому сопротивлению для электромагнитных затухающих колебаний). Количественно затухающие колебания характеризуются декрементом затухания ?, добротностью Q = ?/? и временем затухания ? = 1/?, за которое амплитуда затухающих колебаний убывает в e = 2,73 раза.[2]
Затухание колебаний, уменьшение интенсивности колебаний с течением времени, обусловлено потерей энергии колебательной системой. Простейшим случаем уменьшения энергии колебания является превращение ее в тепло вследствие трения в механических системах и сопротивления в электрических системах. В последних, затухание колебаний происходит также вследствие излучения электромагнитной энергии. Закон затухания колебаний определяется характером потерь энергии и другими свойствами системы. Наиболее изученным является случай, когда затухание колебаний обусловлено уменьшением энергии, пропорциональным квадрату скорости движения в механической системе или соответственно квадрату силы тока в электрической системе, это справедливо для линейных систем. В этом случае затухание колебаний имеет экспоненциальный характер, т.е. размахи колебаний убывают по закону геометрической прогрессии.
Потери энергии в системе, вызывая затухание колебаний, нарушают их периодичность, поэтому затухающие колебания не являются периодическим процессом и, строго говоря, к ним неприменимо понятие периода или частоты. Однако, когда затухание мало, состояния в системе приблизительно повторяются и можно условно пользоваться понятием периода как промежутка времени между двумя последующими прохождениями колеблющейся физической величины (тока, напряжения, размаха колебаний маятника и т.д.) в одну и ту же сторону через максимальное значение. Оценку относительного уменьшения амплитуды колебаний за период дает логарифмический декремент затухания. Скорость затухание колебаний связана с добротностью колебательной системы.
Декремент затухания – количественная характеристика быстроты затухания колебаний. Декремент затухания d равен натуральному логарифму отношения двух последующих максимальных отклонений х колеблющейся величины в одну и ту же сторону: .
Декремент затухания – величина, обратная числу колебаний, по истечении которых амплитуда убывает в е раз. Например, если d=0,01, то амплитуда уменьшится в е раз после 100 колебаний. Декремент затухания характеризует число периодов, в течение которых происходит затухание колебаний, а не время такого затухания. Полное время затухания определяется отношением Т/d.[3]
Добротность колебательной системы, отношение энергии, запасенной в колебательной системе, к энергии, теряемой системой за один период колебания. Добротность характеризует качество колебательной системы, т.к. чем больше Добротность колебательной системы, тем меньше потери энергии в системе за одно колебание. Добротность колебательной системы Q связана с логарифмическим декрементом затухания d. При малых декрементах затухания Q»p/d. В колебательном контуре с индуктивностью L, емкостью C и омическим сопротивлением R добротность колебательной системы
где w — собственная частота контура. В механической системе с массой m, жесткостью k и коэффициентом трения b.
Добротность колебательной системы
Добротность — количественная характеристика резонансных свойств колебательной системы, указывающая, во сколько раз амплитуда установившихся вынужденных колебаний при резонансе превышает амплитуду вынужденных колебаний вдали от резонанса, т. е. в области столь низких частот, где амплитуду вынужденных колебаний можно считать не зависящей от частоты. На этом свойстве основан метод измерения Добротность колебательной системы величина добротности характеризует также и избирательность колебательной системы. Чем больше добротность, тем уже полоса частот внешней силы, которая может вызвать интенсивные колебания системы.
Экспериментально добротность колебательной системы обычно находят как отношение частоты собственных колебаний к полосе пропускания системы, т.е. Q=w/Dw.
Численные значения добротности колебательной системы:
— для радиочастотного колебательного контура 30 — 100;
— для камертона 10000;
— для пластинки пьезокварца 100000;
— для объемного резонатора СВЧ колебаний 100 — 100000.[4]
1.2 Уравнение собственных затухающих колебаний физического и пружинного маятников
Рассмотрим движение груза, жестко зафиксированного на подвесе (металлическом стержне), закрепленном в точке O (см. приложение 1). Система «груз – подвес» в общем случае представляет собой физический маятник. Точку крепления этого маятника условно назовем точкой подвеса.
Опыт показывает, что физический маятник, выведенный из положения равновесия, совершает вращательные колебания. Согласно основному закону динамики вращательного движения произведение момента инерции системы «груз – подвес» на угловое ускорение маятника равно равнодействующему моменту внешних сил: силы тяжести m·g и силы сопротивления Fc (момент силы деформации растяжения тела N равен нулю). Спроецировав это уравнение на направление оси вращения, для случая малых колебаний получим следующее выражение:
где α(t) — угол отклонения колеблющегося груза, отсчитываемый от положения равновесия;
α’ и α» — соответственно угловая скорость и угловое ускорение маятника;
k и h — размерные константы;
I — момент инерции системы «груз – подвес»;
М = -m . g . r . sin(α) = -k . sin(α) — момент возвращающей силы (для малых колебаний М = -k . α);
Mc = -h . α’ — момент сил сопротивления (выражение справедливо для малых угловых скоростей).[5]
Поделив левую и правую части уравнения (1) на величину I и перенеся все слагаемые в левую часть, получим соотношение, аналогичное выражению, описывающему движение собственных затухающих колебаний груза на пружине.
Как видно из уравнения (3) амплитуда углового смещения будет уменьшаться (затухать) с течением времени по экспоненциальному закону. Коэффициент затухания определяет быстроту этого процесса. Он равен промежутку времени по истечении которого, амплитуда колебаний уменьшается в e раз.
Далее рассмотрим уравнение собственных затухающих колебаний пружинного маятника.
Пружинным маятником называется система, состоящая из груза массой m и невесомой пружины жесткостью k.
Пусть масса маятника m , коэффициент упругости пружины k , сила сопротивления, действующая на маятник, F = — bv , v — скорость маятника, b — коэффициент сопротивления среды, в которой находится маятник. Так как рассматриваем только линейные системы, b = const , k = const . x — смещение маятника от положения равновесия.
(второй закон Ньютона)
Данное уравнение и есть дифференциальное уравнение свободных затухающих колебаний пружинного маятника. Принято записывать его в следующем, так называемом каноническом виде:
— коэффициент затухания, — собственная частота свободных (незатухающих) колебаний пружинного маятника, то, что раньше мы обозначали просто w.
Уравнение затухающих колебаний в таком (каноническом) виде описывает затухающие колебания всех линейных систем; конкретная колебательная система отличается только выражениями для b и j0 .
2. Движения маятника с различными механизмами затухания
При исследовании собственных колебаний предполагается отсутствие внешней среды. Наличие среды приводит к появлению диссипативной силы, которая, как мы показали, постепенно уменьшает первоначально переданную системе энергию. Это выражается через уменьшение собственной частоты колебаний ω0 , также как постепенным уменьшением амплитуды колебаний.
Примечание: во избежание путаницы нумерация формул останется такой же как в научной литературе.[6]
Пусть на колеблющееся тело действует сила мокрого трения:
,
Уравнение движения частицы примет следующий вид:
, (1.35)
. (1.36)
Подставляя последнее в (1.35), получим:
(1.37).
Так как полученное уравнение верно для произвольного момента времени, то выражение в скобках должно быть нулем. Последнее дает для неизвестной величины следующее значение
(1.38)
, (1.39)
Учитывая (1.38), решение (1.36) примет следующий вид:
, (1.40)
Полученное уравнение движения описывает затухающие колебания, гдеи – постоянные, определяемые из начальных условий.
В зависимости от соотношения коэффициента трения и частоты собственных колебаний , затухающие колебания подразделяются на два класса. Они соответствуют случаям периодического и непериодического затухания.
Периодическое затухание. Оно осуществляется при слабых силах трения:
, (1.41)
когда величина (1.39) действительна. В этом случае решение (1.40) выражается формулой (в действительной форме)
, (1.42)
Графически это колебание представлено на рисунке (см. приложение 2) и является колебанием с постоянной частотой (1.39), но убывающей с течением времени амплитудой. В этом смысле это не только не гармоническое, но даже и не периодическое колебание, поскольку колебания не повторяются в том же виде. Тем не менее, удобно говорить о периоде этих колебаний, понимая под этим промежуток времени
которая есть максимальное смещение частицы относительно положения равновесия во время колебаний. Из выражения (1.44) следует, что за время , (1.45) амплитуда убывает в раз. Этот промежуток времени называется временем затухания, а – декрементом затухания.
Наиболее объективной характеристикой затухания колебаний является логарифмический декремент, который является отношением периода колебаний (1.43) к времени затухания (1.45)
, (1.46)
Легко заметить, что логарифмический декремент равен натуральному логарифму отношения двух последующих амплитуд:
, (1.47)
Определим число N колебаний, в течение которых амплитуда колебаний убывает в , раз:
откуда следует, что
, (1.48)
На основании этого соотношения можно экспериментально определить логарифмический декремент затухания , считая соответствующее число колебаний.
Непериодическое затухание. При сильном трении
(1.49)
величина (1.43) становится мнимой. В этом случае удобно представить (1.42) так:
, (1.50)
, (1.51)
В рассматриваемом случае решение (1.42) примет вид:
, (1.52)
которое не описывает какое-либо колебание, а представляет экспоненциональное убывание смещения от положения равновесия (см. приложение 3). Непериодическое затухание маятника можно наблюдать, если поместить его в сильно вязкую среду (глицерин, мед).
Специальным случаем непериодического затухания является случай, когда . В этом случае решение уравнения (1.35) выражается в виде:
, (1.53).
Целью данной курсовой работы являлось изучение колебаний маятника с различными механизмами затухания. Для реализации поставленной цели предполагалось решение ряда задач, что позволило сделать следующие выводы:
На основании анализа существующей литературы даны определения исходных теоретических положений, а именно: колебания, виды колебаний, маятник (физический маятник, пружинный маятник), декремент затухания, добротность колебательной системы и т.д.
Также, исходя из проработанной литературы, сделан вывод о том, что данная тема изучалась и изучается многими авторами, как зарубежными, так и советскими, и находит практическая применение в различных науках.
Получены уравнения собственных затухающих колебаний на примерах физического и пружинного маятников.
Таково полученное уравнение собственных затухающих колебаний пружинного маятника. Это уравнение описывает затухающие колебания всех линейных систем; конкретная колебательная система отличается только выражениями для b и j0 .
Данное уравнение определяет быстроту процесса затухания колебаний физического маятника.
Определены два механизма затухающих колебаний: периодическое (осуществляется при слабых силах трения) и непериодическое (при сильном трении), а также получены формулы, для их расчета.
— для периодического механизма затухающих колебаний;
, — для непериодического механизма затухающих колебаний.
Библиографический список литературы
1. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Наука, 1991. — 568 с.
2. Анищенко В.С. Сложные колебания в простых системах. М.: Наука, 1990. – 59 с.
3. Боголюбов Н.Н., Митропольский Ю.А. Асимптотические методы в теории нелинейных колебаний. М.: Наука, 1994. — 408 с.
4. Владимиров С.Н., Майдановский А.С., Новиков С.С. Нелинейные колебания многочастотных автоколебательных систем. Томск: изд-во Томск. ун-та, 1993. — 203 с.
5. Горелик Г. С., Колебания и волны, 2 изд., М., 1989. — 124 с.
6. Дмитриев А.С., Кислов В.Я. Стохастические колебания в радиофизике и электронике. М.: Наука, 2001. — 280 с.
7. Капранов М.В., Кулешев В.Н., Уткин Г.М. Теория колебаний в радиотехнике. М.: Наука, 1994. — 319 с.
8. Ланда П.С. Автоколебания в системах с конечным числом степеней свободы. М.: Наука, 1991. — 360 с.
9. Мигулин В.В., Медведев В.И., Мустель Е.Р., Парыгин В.Н. Основы теории колебаний. М.: Наука, 1989. — 390 с.
10. Мун Ф. Хаотические колебания: Вводный курс для научных работников и инженеров. М.: Мир, 1990. — 312 с.
11. Неймарк Ю.И., Ланда П.С. Стохастические и хаотические колебания. М.: Наука, 1995. — 424 с.
12. Рабинович М.И., Трубецков Д.И. Введение в теорию колебаний и волн. М.: Наука, 1994. — 431 с.
13. Стрелков С. П., Введение в теорию колебаний, 2 изд., М., 2002. — с. 597.
[1] Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Наука, 1991. — с. 137.
[2] Мигулин В.В., Медведев В.И., Мустель Е.Р., Парыгин В.Н. Основы теории колебаний. М.: Наука, 1989. — с. 52.
[3] Стрелков С. П., Введение в теорию колебаний, 2 изд., М., 2002. — с. 597.
[4] Горелик Г.С., Колебания и волны, 2 изд., М., 1989. – с. 82
[5] Мун Ф. Хаотические колебания: Вводный курс для научных работников и инженеров. М.: Мир, 1990. — с. 192.
[6] Стрелков С. П., Введение в теорию колебаний, 2 изд., М., 2002. — с. 149-154.
Уравнение колебаний маятника
Рис.1
Исследуем выражение (2) в зависимости от разности фаз (φ2 — φ1):
1) φ2 — φ1 = ±2mπ (m = 0, 1, 2, . ), тогда A=A1+A2, т. е. амплитуда результирующего колебания А будет равна сумме амплитуд складываемых колебаний;
2) φ2 — φ1 = ±(2m+1)π (m = 0, 1, 2, . ), тогда A=|A1–A2|, т. е. амплитуда результирующего колебания будет равна разности амплитуд складываемых колебаний.
Для практики представляет особый интерес случай, когда два складываемых гармонических колебания одинакового направления мало отличаются по частоте. После сложения этих колебаний получаются колебания с периодически изменяющейся амплитудой. Периодические изменения амплитуды колебания, которые возникают при сложении двух гармонических колебаний с близкими частотами, называются биениями.
Пусть амплитуды складываемых колебаний равны А, а частоты равны ω и ω+Δω, причем Δω
23 Колебания физического маятника.
Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Определения
— угол отклонения маятника от равновесия;
— начальный угол отклонения маятника;
— масса маятника;
— расстояние от точки подвеса до центра тяжести маятника;
— радиус инерции относительно оси, проходящей через центр тяжести.
— ускорение свободного падения.
Момент инерции относительно оси, проходящей через точку подвеса:
.
[править] Дифференциальное уравнение движения физического маятника
Основная статья: Приведённая длина
Пренебрегая сопротивлением среды, дифференциальное уравнение колебаний физического маятника в поле силы тяжести записывается следующим образом:
.
Полагая , предыдущее уравнение можно переписать в виде:
.
Последнее уравнение аналогично уравнению колебаний математического маятника длиной . Величина называется приведённой длиной физического маятника.
[править] Центр качания физического маятника
Центр качания — точка, в которой надо сосредоточить всю массу физического маятника, чтобы его период колебаний не изменился.
Поместим на луче, проходящем от точки подвеса через центр тяжести точку на расстоянии от точки подвеса. Эта точка и будет центром качания маятника.
Действительно, если всю массу сосредоточить в центре качания, то центр качания будет совпадать с центром масс. Тогда момент инерции относительно оси подвеса будет равен , а момент силы тяжести относительно той же оси . Легко заметить, что уравнение движения не изменится.
[править] Теорема Гюйгенса
[править] Формулировка
Если физический маятник подвесить за центр качания, то его период колебаний не изменится, а прежняя точка подвеса сделается новым центром качания.
[править] Доказательство
Вычислим приведенную длину для нового маятника:
.
Совпадение приведённых длин для двух случаев и доказывает утверждение, сделанное в теореме.
[править] Период колебаний физического маятника
Для того, чтобы найти период колебаний физического маятника, необходимо решить уравнение качания. Для этого умножим левую часть этого уравнения на , а правую часть на . Тогда:
.
Интегрируя это уравнение, получаем.
,
где произвольная постоянная. Её можно найти из граничного условия, что в моменты . Получаем: . Подставляем и преобразовываем получившееся уравнение:
.
Отделяем переменные и интегрируем это уравнение:
.
Удобно сделать замену переменной, полагая . Тогда искомое уравнение принимает вид:
.
Здесь — нормальный эллиптический интеграл Лежандра 1-го рода. Для периода колебаний получаем формулу:
.
Здесь — полный нормальный эллиптический интеграл Лежандра 1-го рода.
[править] Период малых колебаний физического маятника
Если амплитуда колебаний мала, то корень в знаменателе эллиптического интеграла приближенно равен единице. Такой интеграл легко берется, и получается хорошо известная формула малых колебаний:
.
24 Колебания математического маятника
Математи́ческий ма́ятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки, находящейся на невесомой нерастяжимой нити или на невесомом стержне в однородном поле сил тяготения. Период малых собственных колебаний математического маятника длины l неподвижно подвешенного в однородном поле тяжести с ускорением свободного падения g равен
и не зависит [1] от амплитуды и массы маятника.
Плоский математический маятник со стержнем — система с одной степенью свободы. Если же стержень заменить на растяжимую нить, то это система с двумя степенями свободы со связью. Пример школьной задачи, в которой важен переход от одной к двум степеням свободы.
При малых колебаниях физический маятник колеблется так же, как математический с приведённой длиной.
Уравнение колебаний маятника
Колебания математического маятника описываются обыкновенным дифференциальным уравнением вида
где ω ― положительная константа, определяемая исключительно из параметров маятника. Неизвестная функция x(t) ― это угол отклонения маятника в момент t от нижнего положения равновесия, выраженный в радианах; , где L ― длина подвеса, g ― ускорение свободного падения. Уравнение малых колебаний маятника около нижнего положения равновесия (т. н. гармоническое уравнение) имеет вид:
.
[править] Решения уравнения движения
[править] Гармонические колебания
Маятник, совершающий малые колебания, движется по синусоиде. Поскольку уравнение движения является обыкновенным ДУ второго порядка, для определения закона движения маятника необходимо задать два начальных условия — координату и скорость, из которых определяются две независимых константы:
где A — амплитуда колебаний маятника, θ0 — начальная фаза колебаний, ω — циклическая частота, которая определяется из уравнения движения. Движение, совершаемое маятником, называется гармоническими колебаниями
[править] Нелинейный маятник
Для маятника, совершающего колебания с большой амплитудой, закон движения более сложен:
где — это синус Якоби. Для он является периодической функцией, при малых совпадает с обычным тригонометрическим синусом.
Параметр определяется выражением
где — энергия маятника в единицах t −2 .
Период колебаний нелинейного маятника
где K — эллиптический интеграл первого рода.
[править] Движение по сепаратрисе
Движение маятника по сепаратрисе является непериодическим. В бесконечно далёкий момент времени он начинает падать из крайнего верхнего положения в какую-то сторону с нулевой скоростью, постепенно набирает её, и останавливается, возвратившись в исходное положение.
25 Затухающие колебания. Зависимость амплитуды от времени.
Затухающие колебания — колебания, энергия которых уменьшается с течением времени. Бесконечно длящийся процесс вида в природе невозможен. Свободные колебания любого осциллятора рано или поздно затухают и прекращаются. Поэтому на практике обычно имеют дело с затухающими колебаниями. Они характеризуются тем, что амплитуда колебаний A является убывающей функцией. Обычно затухание происходит под действием сил сопротивления среды, наиболее часто выражаемых линейной зависимостью от скорости колебаний или её квадрата.
Пускай имеется система, состоящая из пружины (подчиняющейся закону Гука), один конец которой жёстко закреплён, а на другом находится тело массой m. Колебания совершаются в среде, где сила сопротивления пропорциональна скорости с коэффициентом c (см. вязкое трение).
Тогда второй закон Ньютона для рассматриваемой системы запишется так:
где Fc — сила сопротивления, Fy — сила упругости
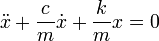
или в дифференциальной форме
где k — коэффициент упругости в законе Гука, c — коэффициент сопротивления, устанавливающий соотношение между скоростью движения грузика и возникающей при этом силой сопротивления.
Для упрощения вводятся следующие обозначения:
Величину ω называют собственной частотой системы, ζ — коэффициентом затухания.
Тогда дифференциальное уравнение принимает вид
Сделав замену x = e λt , получают характеристическое уравнение
Корни которого вычисляются по следующей формуле
[править] Решения
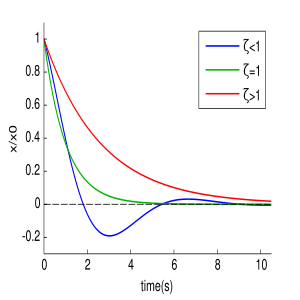
Зависимость графиков колебаний от значения ζ.
В зависимости от величины коэффициента затухания решение разделяется на три возможных варианта.
Если , то имеется два действительных корня, и решение дифференциального уравнения принимает вид:
В этом случае колебания с самого начала экспоненциально затухают.
Граница апериодичности
Если , два действительных корня совпадают , и решением уравнения является:
В данном случае может иметь место вре́менный рост, но потом — экспоненциальное затухание.
Если , то решением характеристического уравнения являются два комплексно сопряжённых корня
Тогда решением исходного дифференциального уравнения является
Где — собственная частота затухающих колебаний.
Константы c1 и c2 в каждом из случаев определяются из начальных условий:
26 Вынужденные колебания. Понятие резонанса.
Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Наиболее простой и содержательный пример вынужденных колебаний можно получить из рассмотрения гармонического осциллятора и вынуждающей силы, которая изменяется по закону: .
Механические колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний — это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой. Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Рис. 1. График гармонических колебаний
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
Рис. 2. Закон косинуса
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
Рис. 3. Закон синуса
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
Теперь дифференцируем полученное равенство (4) :
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре). Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными ;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
Рис. 4. Пружинный маятник
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
Если 0′ alt=’x>0′ /> (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то 0′ alt=’F_>0′ /> . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
Рис. 5. Математический маятник
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. 0′ alt=’x>0′ /> ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это — уравнение гармонических колебаний вида (6) , в котором
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Рис. 6. Затухающие колебания
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
Рис. 7. Резонанс
Мы видим, что вблизи частоты наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
 Декремент затухания – количественная характеристика быстроты затухания колебаний. Декремент затухания d равен натуральному логарифму отношения двух последующих максимальных отклонений х колеблющейся величины в одну и ту же сторону: .
Декремент затухания – количественная характеристика быстроты затухания колебаний. Декремент затухания d равен натуральному логарифму отношения двух последующих максимальных отклонений х колеблющейся величины в одну и ту же сторону: .
 где w — собственная частота контура. В механической системе с массой m, жесткостью k и коэффициентом трения b.
где w — собственная частота контура. В механической системе с массой m, жесткостью k и коэффициентом трения b.


















 , (1.39)
, (1.39)







 , (1.41)
, (1.41)
 , (1.43)
, (1.43) , (1.44)
, (1.44) которая есть максимальное смещение частицы относительно положения равновесия во время колебаний. Из выражения (1.44) следует, что за время
которая есть максимальное смещение частицы относительно положения равновесия во время колебаний. Из выражения (1.44) следует, что за время 











 , (1.50)
, (1.50)
 , (1.51)
, (1.51)
 Специальным случаем непериодического затухания является случай, когда
Специальным случаем непериодического затухания является случай, когда  , (1.53).
, (1.53).


 — угол отклонения маятника от равновесия;
— угол отклонения маятника от равновесия; — начальный угол отклонения маятника;
— начальный угол отклонения маятника; — масса маятника;
— масса маятника; — расстояние от точки подвеса до центра тяжести маятника;
— расстояние от точки подвеса до центра тяжести маятника; — радиус инерции относительно оси, проходящей через центр тяжести.
— радиус инерции относительно оси, проходящей через центр тяжести. — ускорение свободного падения.
— ускорение свободного падения. .
. .
. , предыдущее уравнение можно переписать в виде:
, предыдущее уравнение можно переписать в виде: .
. . Величина
. Величина  , а момент силы тяжести относительно той же оси
, а момент силы тяжести относительно той же оси  . Легко заметить, что уравнение движения не изменится.
. Легко заметить, что уравнение движения не изменится. .
. , а правую часть на
, а правую часть на  . Тогда:
. Тогда: .
. ,
, произвольная постоянная. Её можно найти из граничного условия, что в моменты
произвольная постоянная. Её можно найти из граничного условия, что в моменты  . Получаем:
. Получаем:  . Подставляем и преобразовываем получившееся уравнение:
. Подставляем и преобразовываем получившееся уравнение: .
. .
. . Тогда искомое уравнение принимает вид:
. Тогда искомое уравнение принимает вид: .
. — нормальный эллиптический интеграл Лежандра 1-го рода. Для периода колебаний получаем формулу:
— нормальный эллиптический интеграл Лежандра 1-го рода. Для периода колебаний получаем формулу: .
. — полный нормальный эллиптический интеграл Лежандра 1-го рода.
— полный нормальный эллиптический интеграл Лежандра 1-го рода. .
.

 , где L ― длина подвеса, g ― ускорение свободного падения. Уравнение малых колебаний маятника около нижнего положения равновесия (т. н. гармоническое уравнение) имеет вид:
, где L ― длина подвеса, g ― ускорение свободного падения. Уравнение малых колебаний маятника около нижнего положения равновесия (т. н. гармоническое уравнение) имеет вид: .
.
 — это синус Якоби. Для
— это синус Якоби. Для  он является периодической функцией, при малых
он является периодической функцией, при малых  совпадает с обычным тригонометрическим синусом.
совпадает с обычным тригонометрическим синусом.
 — энергия маятника в единицах t −2 .
— энергия маятника в единицах t −2 .
 в природе невозможен. Свободные колебания любого осциллятора рано или поздно затухают и прекращаются. Поэтому на практике обычно имеют дело с затухающими колебаниями. Они характеризуются тем, что амплитуда колебаний A является убывающей функцией. Обычно затухание происходит под действием сил сопротивления среды, наиболее часто выражаемых линейной зависимостью от скорости колебаний
в природе невозможен. Свободные колебания любого осциллятора рано или поздно затухают и прекращаются. Поэтому на практике обычно имеют дело с затухающими колебаниями. Они характеризуются тем, что амплитуда колебаний A является убывающей функцией. Обычно затухание происходит под действием сил сопротивления среды, наиболее часто выражаемых линейной зависимостью от скорости колебаний  или её квадрата.
или её квадрата.





 , то имеется два действительных корня, и решение дифференциального уравнения принимает вид:
, то имеется два действительных корня, и решение дифференциального уравнения принимает вид:
 , два действительных корня совпадают
, два действительных корня совпадают  , и решением уравнения является:
, и решением уравнения является:
 , то решением характеристического уравнения являются два комплексно сопряжённых корня
, то решением характеристического уравнения являются два комплексно сопряжённых корня

 — собственная частота затухающих колебаний.
— собственная частота затухающих колебаний.
 .
.





