Основные понятия современной теории управления
Страницы работы


Содержание работы
1. Основные понятия современной теории управления.
Оглавление
1.1. Переменные состояния и уравнения состояния динамической
1.2. Матричная передаточная функция………………………………5
1.3. Понятия управляемости и наблюдаемости системы……………5
1.1. Переменные состояния и уравнения состояния динамической системы.
Состояние динамической системы- это совокупность физических переменных  характеризующих поведение системы в будущем при условии, что известны ее начальное состояние и приложенные воздействия.
характеризующих поведение системы в будущем при условии, что известны ее начальное состояние и приложенные воздействия.
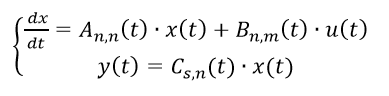
Динамическая система может быть описана системой дифференциальных уравнений первого порядка
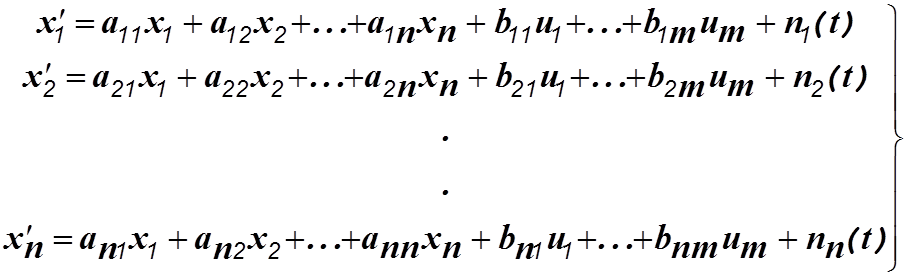
Запишем эту систему в матричной форме
 (1.1)
(1.1)
В этом выражении X- -матрица параметров (координат) состояния, А-
-матрица параметров (координат) состояния, А- матрица состояния, составленная из коэффициентов системы уравнений, B-
матрица состояния, составленная из коэффициентов системы уравнений, B- матрица управления, U-
матрица управления, U- матрица управляющих воздействий, n(t)-вектор возмущений размерности
матрица управляющих воздействий, n(t)-вектор возмущений размерности 
Все или только некоторые параметры состояния для использования в целях управления должны быть измерены приборами специальной измерительной системы. Поэтому для полного описания динамической системы уравнение состояния (1.1) должно быть дополнено уравнением, связывающим переменные состояния  и выходные переменные измерительной системы
и выходные переменные измерительной системы  Эти выходные переменные в общем случае являются линейной комбинацией параметров состояния с некоторыми весами и связь между ними выражается системой линейных алгебраических уравнений
Эти выходные переменные в общем случае являются линейной комбинацией параметров состояния с некоторыми весами и связь между ними выражается системой линейных алгебраических уравнений
 (1.2)
(1.2)
В векторно-матричной форме уравнение (1.2) можно записать следующим образом
 (1.3)
(1.3)
Матрицу столбец Y=  называют выходным вектором или вектором наблюдения. Матрица С размера
называют выходным вектором или вектором наблюдения. Матрица С размера  называется матрицей выхода или матрицей наблюдения.
называется матрицей выхода или матрицей наблюдения.
Решение векторно-матричного уравнения (1.1) при n(t)=0 можно найти так же, как и решение обыкновенного дифференциального уравнения 1-го порядка. Рассмотрим обыкновенное дифференциальное уравнение вида

В изображениях по Лапласу получим

Использовав процедуру обратного преобразования Лапласа, получим
 (1.4)
(1.4)
Решение векторного уравнения (1.1) определяется аналогично.


В этом выражении I-единичная матрица. По аналогии с (1.4) запишем
 (1.5)
(1.5)
Функция  называется фундаментальной или переходной матрицей.
называется фундаментальной или переходной матрицей.
Методы вычисления фундаментальной матрицы.
а).Метод разложения в ряд.

Ограничившись конечным числом членов ряда и произведя их суммирование, можно получить приближенное выражение для фундаментальной матрицы.
б).Метод, основанный на определении собственных значений матрицы состояния.
В соответствии с преобразованием Лапласа получим

 (1.6)
(1.6)
Определение фундаментальной матрицы сводится к вычислению собственных значений матрицы состояния и последующему использованию процедуры обратного преобразования Лапласа.
в).Метод, основанный на теореме Сильвестра.
Предположим, что имеется некоторая функция f(A) от матрицы А, которую можно представить в виде степенного ряда
Допустим, что все собственные числа матрицы А различны. Тогда согласно теореме Сильвестра
 где
где
Здесь  собственные числа матрицы состояния А.
собственные числа матрицы состояния А.
В частном случае, когда  получим
получим
 (1.7)
(1.7)
После определения фундаментальной матрицы строится решение (1.5).
Часто возникает задача найти описание системы в понятиях пространства состояний, если известна ее передаточная функция в обычном понимании, т.е. в системе “вход-выход”. Пусть эта передаточная функция имеет вид

Дифференциальное уравнение в изображениях по Лапласу будет следующим

Допустим вначале, что m=n.
Сделаем замену  и перейдем к системе уравнений первого порядка.
и перейдем к системе уравнений первого порядка.
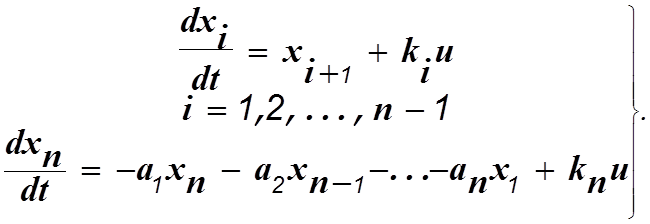 (1.8)
(1.8)
Для определения неизвестных коэффициентов  проделаем следующие операции:
проделаем следующие операции:
а) перейдем в системе (1.8) к изображениям по Лапласу при нулевых начальных условиях;
б) найдем характеристический определитель полученной алгебраической системы уравнений;
в)решим эту систему уравнений относительно переменной 
г)учитывая, что  найдем выражения для x(s) и, приравнивая числитель полученного выражения числителю исходной передаточной функции, получим рекуррентные соотношения для определения коэффициентов
найдем выражения для x(s) и, приравнивая числитель полученного выражения числителю исходной передаточной функции, получим рекуррентные соотношения для определения коэффициентов 
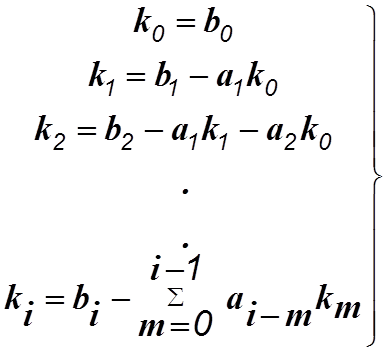 (1.9)
(1.9)
В практических приложениях всегда  m
m
Пространство состояний в задачах проектирования систем оптимального управления

Введение
Исследование системы управления во временной области с помощью переменных состояния широко используется в последнее время благодаря простоте проведения анализа.
Состоянию системы соответствует точка в определённом евклидовом пространстве, а поведение системы во времени характеризуется траекторией, описываемой этой точкой.
При этом математический аппарат включает готовые решения по аналоговому и дискретному LQR и DLQR контролерам, фильтра Калмана, и всё это с применением матриц и векторов, что и позволяет записывать уравнения системы управления в обобщённом виде, получая дополнительную информацию при их решении.
Целью данной публикации является рассмотрение решения задач проектирования систем оптимального управления методом описания пространства состояний с использованием программных средств Python.
Теория кратко
Векторно-матричная запись модели линейного динамического объекта с учетом уравнения измерения принимает вид:
 (1)
(1)
Если матрицы A(t), B(t) и C(t) не зависят от времени, то объект называется объектом с постоянными коэффициентами, или стационарным объектом. В противном случае объект будет нестационарным.
При наличии погрешностей при измерении, выходные (регулируемые) сигналы задаются линеаризованным матричным уравнением:
 (2)
(2)
где y(t) – вектор регулируемых (измеряемых) величин; C(t) – матрица связи вектора измерений с вектором состояний; v(t) – вектор ошибок измерений (помехи).
Структура линейной непрерывной системы, реализующая уравнения (1) и (2), приведена на рисунке:
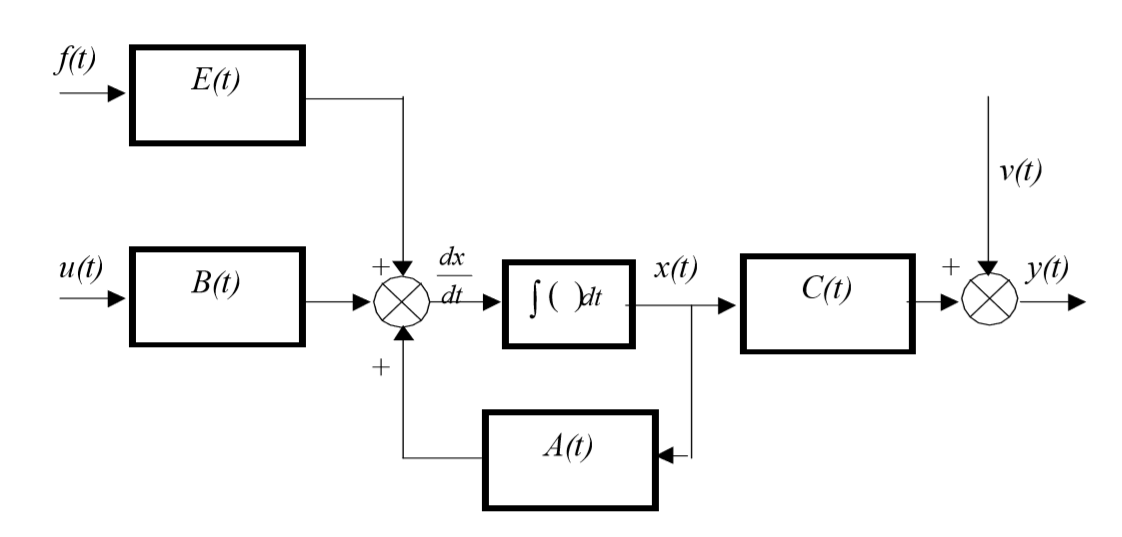
Данная структура соответствует математической модели объекта, построенной в пространстве состояний его входных x(t), u(t), выходных y(t) и внутренних, или фазовых координат x(t).
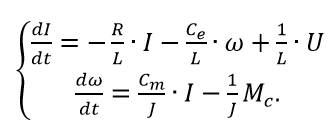
Для примера рассмотрим математическую модель двигателя постоянного тока с независимым возбуждением от постоянных магнитов. Система уравнений электрической и механической частей двигателя для рассматриваемого случая будет выглядеть так:
 (3)
(3)
Первое уравнение отражает взаимосвязь между переменными в цепи якоря, второе — условия механического равновесия. В качестве обобщенных координат выберем ток якоря I и частоту вращения якоря ω.
Управлением являются напряжение на якоре U, возмущением — момент сопротивления нагрузки Mc. Параметрами модели являются активное сопротивление и индуктивность цепи и якоря, обозначенные соответственно Rя, и Lя, а также приведенный момент инерции J и конструктивные постоянные се и см (в системе СИ: Cе=См).
Разрешая исходную систему относительно первых производных, получим уравнения двигателя в пространстве состояний.
 (4)
(4)
В матричном виде уравнения (4) примут вид (1):
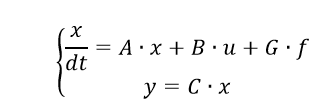 (5)
(5)
где вектор обобщенных координат  , вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели:
, вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели:
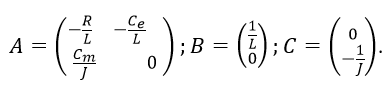 (6)
(6)
Если в качестве регулируемой величины выбрать частоту вращения, то уравнение измерения запишется в виде:
 (7)
(7)
а матрица измерений примет вид:
Сформируем модель двигателя в Python. Для этого вначале зададим конкретные значения параметров двигателя: U = 110 В; R =0,2 Ом; L = 0,006 Гн; J =0,1 кг/м2;Ce =Cm=1,3 В/С и найдем значения коэффициентом матриц объекта из (6).
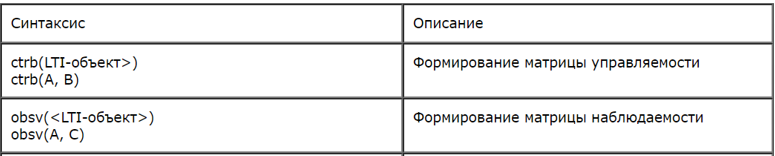
Разработка программы формирующей модель двигателя с проверкой матриц на наблюдаемость и управляемость:
При разработке программы использовалась специальная функция def matrix_rank для определения ранга матрицы и функции, приведенные в таблице:
Результаты работы программы:
Матрица А:
[[ -33.33333333 -216.66666667]
[ 13. 0. ]]
Матрица B:
[[166.66666667]
[ 0. ]]
Матрица C:
[[0 1]]
Скаляр D:
0
Передаточная функция двигателя:
2167/(s^2 + 33.33 s + 2817)
Ранг матрицы управляемости: 2
Ранг матрицы наблюдаемости: 2

1. На примере двигателя постоянного тока с независимым магнитным возбуждением рассмотрена методика проектирования управления в пространстве состояний;
2. В результате работы программы получены передаточная функция, переходная характеристика, а так же ранги матриц управляемости и наблюдаемости. Ранги совпадают с размерностями пространства состояний, что подтверждает управляемость и наблюдаемость модели.
Пример проектирования оптимальной системы управления с дискретным dlqr контролером и полной обратной связью
Определения и терминология
Линейно-квадратичный регулятор (англ. Linear quadratic regulator, LQR) — в теории управления один из видов оптимальных регуляторов, использующий квадратичный функционал качества.
Задача, в которой система описывается линейными дифференциальными уравнениями, а показатель качества, представляет собой квадратичный функционал, называется задачей линейно-квадратичного управления.
Широкое распространение получили линейно-квадратичные регуляторы (LQR) и линейно-квадратичные гауссовы регуляторы (LQG).
Приступая к практическому решению задачи всегда нужно помнить об ограничениях
Для синтеза оптимального дискретного регулятора линейных стационарных систем нужна функция численного решения уравнения Беллмана.Такой функции в библиотеке Python Control Systems [1] нет, но можно воспользоваться функцией для решения уравнения Риккати, приведенной в публикации [2]:
Но нужно ещё учесть ограничения на синтез оптимального регулятора, приведенные в [3]:
- система, определяемая матрицами (A, B) должна быть стабилизируема;
- должны выполняться неравенства S> 0, Q – N/R–N.T>0, пара матриц (Q – N/R–N.T,
A – B/R–B.T) не должна иметь наблюдаемые моды с собственными значениями на
действительной оси.
После копаний в обширной и не однозначной теории, которую, по понятным причинам, я не привожу, задачу удалось решить, и все ответы можно прочитать прямо в комментариях к коду.
Структурная схема регулятора системы управления с обратной связью по всем переменным состояния изображена на рисунке:

Для каждого начального состояния x0 оптимальный линейный регулятор порождает оптимальное программное управление u*(x, k) и оптимальную траекторию х*(k).
Программа, формирующая модель оптимального управления с dlqr контролером
K=
[[ 0.82287566 -0.17712434]
[ 0.82287566 -0.17712434]]
P=
[[ 3.73431348 -1.41143783]
[-1.41143783 1.16143783]]
E=
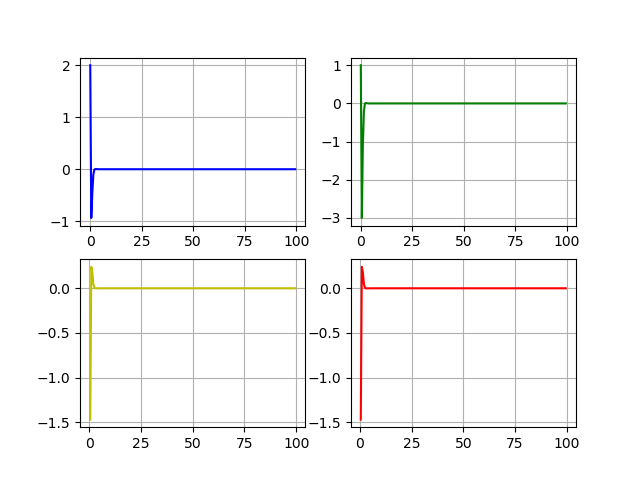
[0.17712434+0.17712434j 0.17712434-0.17712434j]
Динамика состояний и управлений: x1, x2, u1, u2.
Вывод
Отдельные задачи оптимального управления по типу приведенных можно решать средствами Python, комбинируя возможности библиотек Python Control Systems, SciPy,NumPy, что, безусловно, способствует популяризации Python, учитывая, что ранее такие задачи можно было решать только в платных математических пакетах.
Уравнение состояния динамической системы представляет собой систему
Тема:«Векторно-матричные модели систем управления в непрерывном времени»
Понятие пространства состояний
Современная теория автоматического управления оперирует с векторно-матричными моделями динамических систем. При этом рассматриваются в общем случае многомерные системы, т.е. системы произвольного порядка со многими входами и многими выходами, в связи, с чем широко используются векторно-матричные уравнения и аппарат векторной алгебры. Для получения векторно-матричной модели (ВММ) исследуемая динамическая система представляется в виде “черного ящика” с некоторым числом входных и выходных каналов (рис. 1.1, а).
Рис.1.1. Скалярное (а) и векторное (б) представления динамической системы в виде «черного ящика»
Все переменные, характеризующие систему, можно разделить на три группы.
1. Входные переменные или входные воздействия, генерируемые системами, внешними по отношению к исследуемой системе. Они характеризуются вектором входа.
 r — число входов
r — число входов
2. Выходные переменные, характеризующие реакцию системы на указанные входные воздействия. Представляются вектором выхода
 m — число выходов.
m — число выходов.
3. Промежуточные переменные, характеризующие внутреннее состояние системы, — переменные состояния, представляются вектором
 n — число переменных состояния.
n — число переменных состояния.
Таким образом, совокупность входов можно рассматривать как один обобщенный вход, на который воздействует вектор входа u, совокупность выходов как вектор y, а совокупность промежуточных координат, характеризующих состояние системы, — в виде вектора состояния x (см. рис. 1.1, б).
Состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно.
Собственно система, ее входы и выходы — это три взаимосвязанных объекта, которые в каждой конкретной ситуации определяются соответственно математической моделью системы, заданием множеств входных и выходных переменных.
Решение задач анализа и синтеза связано с исследованием состояний системы, множество которых образует пространство состояний, .
.
Векторно-матричные модели в непрерывном времени
В общем случае динамическая система в непрерывном может быть описана парой матричных уравнений:
 |
 , дает вектор состояния системы
, дает вектор состояния системы  |
 могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:
могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:  |
 |
 полностью определяется, если известны начальные значения
полностью определяется, если известны начальные значения  и входное напряжение U(t) при
и входное напряжение U(t) при  можно выбрать в качестве переменных состояния, то есть
можно выбрать в качестве переменных состояния, то есть 
 |
 |
 — скорости вращения ротора, тока якоря i(t), углового перемещения ротора
— скорости вращения ротора, тока якоря i(t), углового перемещения ротора  . При использовании знакомых зависимостей для электродвижущей силы
. При использовании знакомых зависимостей для электродвижущей силы  и вращающего момента двигателя
и вращающего момента двигателя  получим уравнение электрической цепи
получим уравнение электрической цепи
 получим следующую векторно-матричную модель электродвигателя постоянного тока
получим следующую векторно-матричную модель электродвигателя постоянного тока  |
 |
 |
 |
Если компонентами вектора состояния выбрать  , где Uп – напряжение преобразователя, iя — ток электродвигателя,
, где Uп – напряжение преобразователя, iя — ток электродвигателя,  — скорость вращения электродвигателя, МУ — момент упругости механизма,
— скорость вращения электродвигателя, МУ — момент упругости механизма,  — скорость вращения механизма, то элементы векторно-матричной модели
— скорость вращения механизма, то элементы векторно-матричной модели
 |
 |
 |
 для описания этого объекта?
для описания этого объекта? и одним выходом y(t) представлено следующим уравнением в операторной форме
и одним выходом y(t) представлено следующим уравнением в операторной форме

 — угол поворота ротора электродвигателя,
— угол поворота ротора электродвигателя, приведенной ниже векторно-матричной модели?
приведенной ниже векторно-матричной модели?