Уравнения состояния
При решении некоторых задач теории автоматического управления удобнее представлять дифференциальное уравнение объекта (5.1) или дифференциальные уравнения системы (5.4) и (5.6) в виде совокупности дифференциальных уравнений первого порядка. Не умаляя общности, рассмотрим эти уравнения применительно к управляемому объекту.
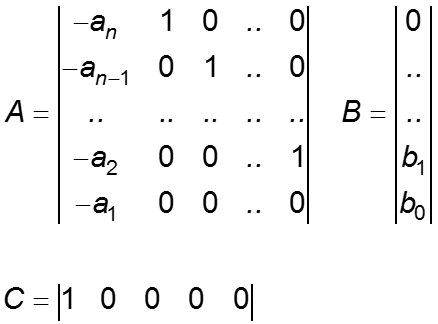
Пусть объект описывается дифференциальным уравнением n-го порядка (5.1)

 называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений

 устанавливается алгебраическим уравнением
устанавливается алгебраическим уравнением

Обычно уравнения (5.71) и (5.72) записываются в векторпо-матричной форме:

 — матрицы-столбцы. Матрицу-столбец-
— матрицы-столбцы. Матрицу-столбец-
 могут иметь неодинаковые размерности.
могут иметь неодинаковые размерности.
В выборе переменных состояния имеется определенная свобода. Важно только, чтобы они были независимыми. От того, как выбраны переменные, зависит форма уравнений (5.73) и (5.74), т. е. вид входящих в них матриц.
При нормальной форме уравнений состояния в качестве переменных состояния выбираются сама управляемая величина \п- 1 ее производные:

 т. с. когда оно имеет вид
т. с. когда оно имеет вид

Достоинством нормальной формы является то, что переменные состояния имеют ясный физический смысл, а некоторые из них (например, хих2 и х:]) могут быть непосредственно измерены датчиками различных типов.
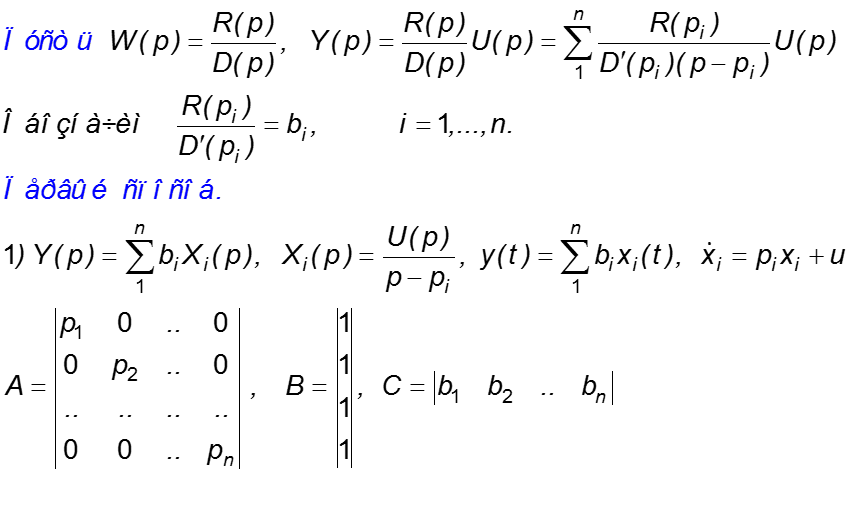
Для получения уравнений состояния в канонической форме уравнение объекта (5.70) представляется в виде



Если корни рь Ръ-Рп полинома С0(р) действительные однократные, то правая часть (5.80) может быть представлена в виде суммы элементарных дробей:


где К; и ()г- — коэффициенты разложения.
В качестве неременных состояния выбираются слагаемые суммы (5.81):

Большим достоинством канонической формы является диагоиальиость матрицы Л , что существенно упрощает решение уравнения (5.73). Основной недостаток ее состоит в том, что переменные состояния не имеют ясного физического смысла, в результате чего возникает проблема их непосредственного измерения.
Существуют и другие способы выбора переменных состояния, которые здесь не рассматриваются.
Решение векторно-матричиого уравнения (5.73) может быть представлено в виде

Здесь оно без строгого доказательства построено по аналогии с решением линейного дифференциального уравнения 1-го порядка

общий интеграл которого, как известно, определяется но формуле

 называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда
называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда

При других формах уравнений состояния для определения фундаментальной матрицы можно использовать известные способы нахождения матричных функций, например, теоремы Кели—Гамильтона или Сильвестра. Можно также использовать формулу

 —
—

При необходимости можно осуществить обратный переход от уравнений состояния к передаточным функциям объекта. Для этого уравнение (5.73) запишем в изображениях по Лапласу:

 получается формула (5.88). Из уравнения
получается формула (5.88). Из уравнения
(5.74) с учетом (5.89) найдем изображение управляемой величины при нулевых начальных значениях:


При описании свойств объекта уравнениями состояния возникают две проблемы, нетипичные для случая, когда используется одно дифференциальное уравнение я-то порядка. Эти проблемы рассматриваются в следующем параграфе.
Уравнение состояния системы в нормальной форме
СОСТАВЛЕНИЕ ДСС ПО ПЕРЕДАТОЧНОЙ ФУНКЦИИ
Схема системы в переменных состояния может быть составлена по передаточной функции тремя способами: методом прямого программирования, методом параллельного программирования и методом последовательно программирования.
Метод прямого программирования
Этот метод позволяет представить систему уравнений состояния в нормальной канонической форме по известной передаточной функции звена или системы с одним входом и одним выходом.
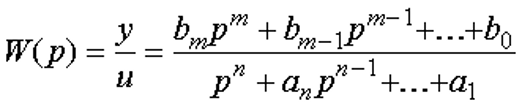
Известно, что системе с передаточной функцией
соответствует дифференциальное уравнение
где P i = d i / dt i
Рассмотрим вначале систему с передаточной функцией
которой соответствует дифференциальное уравнение
Введем обозначения: y 1 = x 1 и при i=1, 2, . n-1. и запишем последнее уравнение в виде
Следовательно, система уравнений состояния, соответствующая передаточной функции (4.1) , м.б. записана в виде
Записывая эту систему в векторно -матричной форме, получим
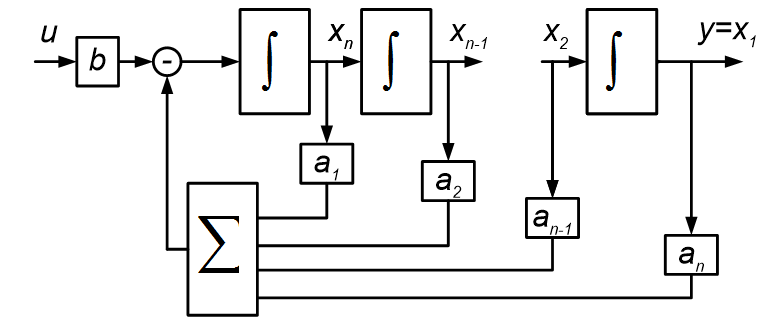
Используя уже известные правила, построим Д C С по уравнениям состояния в виде рис. 4.1. :
Рассмотрим теперь систему с передаточной функцией
которой соответствует дифференциальное уравнение
Подстановкой x 1 =x 2 / b 0 уравнение ( 4.4 ) сводится к ( 4.2 ) и следовательно ,
— уравнения состояния, соответствующие передаточным функциям (4.1) и (4.3) разнятся только масштабом выходной переменной и, следовательно, только элементами матрицы С . Для последнего случая
— в ДСС появляется дополнительное масштабирующее звено с коэффициентом передачи b 0 , со входом y 1 и выходом x 2 . Это звено выделено жирной штриховой линией на рис. 4.1.
Рассмотрим далее систему с передаточной функцией
Этой передаточной функции соответствует дифференциальное уравнение
Выходную величину X i можно представить в операторной форме выражением
Переходя к функции времени, получим
Следовательно, ДСС данной системы с передаточной функцией (4.5) может быть получена из ДСС уже известной системы путем введения масштабирующего звена с коэффициентом передачи b i , входом y i+1 и выходом x i. В уравнениях состояния изменятся лишь элементы матрицы С . Последняя будет иметь вид
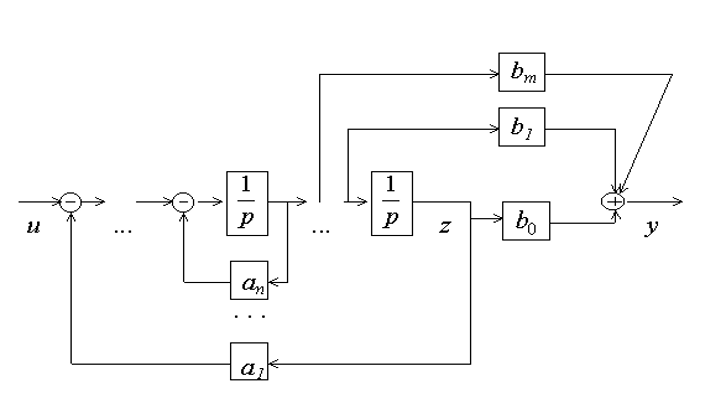
Таким образом выходную величину исходной системы с передаточной функцией
можно представить в виде суммы в соответствии с числом слагаемых полинома числителя M(p), т.е.
Переходя к функции времени, получим
или с учетом ранее введенных обозначений
Следовательно, структурная схема исходной системы отличается от ранее полученных наличием полного набора масштабирующих звеньев ( всего их m+1 ) c коэффициентами передачи b i в цепи формирования выходной переменной x. (см. рис. 4.1.)
Матрицы А и В всех рассмотренных систем одинаковы. Их элементы формируются из коэффициентов полинома знаменателя передаточной функции.
Коэффициенты полинома числителя определяют только элементы матрицы С и влияют лишь на формирование выходной переменной. В последнем наиболее общем случае матрица С имеет вид
Пример1: Составить ДСС и систему уравнений состояния для звена с передаточной функцией
Приведем передаточную функцию звена к стандартному виду
где a 0 =1/T 2 , b 0 =1/T 2 , b 1 =T 1 /T 2
Стандартной передаточной функции соответствует стандартная ДСС:
и система уравнений состояния первого порядка
Рассмотрим еще пример:
Составить ДСС и уравнения состояния для системы, заданной передаточной функцией
Приводя запись передаточной функции в стандартную форму, получим: a 2 =7, a 1 =12, a 0 =0, b 2 =1, b 1 =3, b 0 =2.
ДСС изобразим в стандартном виде
Система уравнений состояния для этого случая в обычной форме
В матричной форме
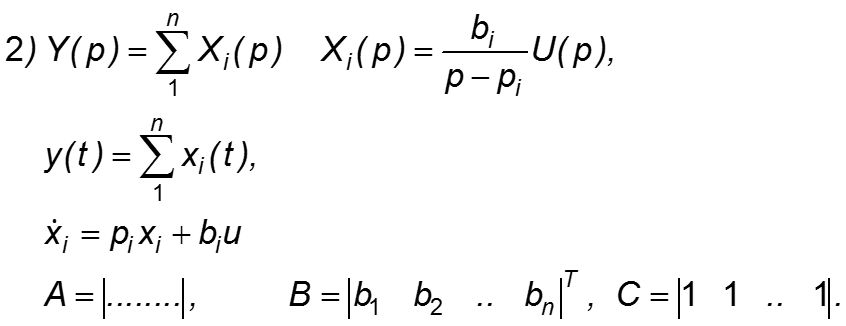
При указанном подходе передаточная функция исходной системы представляется в виде суммы передаточных функций однотипных звеньев следующим образом:
Здесь l i -корни полинома знаменателя передаточной функции, а a i — находятся по формуле
Такая передаточная функция соответствует параллельному соединению n однотипных звеньев со структурными схемами, представленными на рис. 4.4 .
Выходные сигналы x i звеньев суммируются .
Используя эту методику, составим ДСС для рассмотренной выше системы. Корни знаменателя равны : l 1 =0, l 2 =-3, l 3 =-4.
Вычисляя коэффициенты числителей, получим a 1 =1/6, a 2 =-2/3, a 3 =3/2. Тогда структурная схема системы примет вид (рис.4.5.)
Этой структурной схеме соответствует следующая система уравнений состояния
Для составления ДСС этим методом исходная передаточная функция представляется в виде произведения дробно-рациональных функций, порядок полиномов знаменателя и числителя которых не превышает единицы. Если порядки числителя и знаменателя исходной передаточной функции одинаковы, т.е. m=n, то последняя записывается в виде
где b k и l k — соответственно корни полинома числителя (нули) и корни полинома знаменателя (полюса). Если n>m (что практически всегда имеет место), то (n-m) сомножителей имеют в числителе единицу. Стандартная ДСС для элементарной дробно-рациональной функции общего вида нами была ранее, по существу, обоснована. Она изображается в виде
Поскольку произведение передаточных функций соответствует последовательному соединению звеньев, ДСС исходной системы будет содержать n последовательно соединенных ДСС идентичной конфигурации.
Передаточную функцию уже рассмотренной системы представим в виде произведения трех дробей
ДСС соответствует последовательному соединению ДСС элементарных звеньев и имеет следующий вид
Этой ДСС соответствует следующая система уравнений состояния
в матричной форме принимающая следующий вид
Следует подчеркнуть, что для одной и той же системы можно составить несколько схем в переменных состояния, отличающихся природой промежуточных переменных, выбранных для описания системы. Различному выбору переменных состояния соответствуют различные матрицы системы, управления и наблюдения и различные векторные дифференциальные уравнения.
Методы переменных состояния в теории автоматического управления. Современная теория автоматического управления
Страницы работы
Фрагмент текста работы
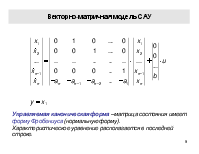
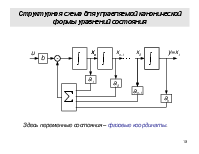
Характеристическое уравнение располагается в последней строке.
Структурная схема для управляемой канонической формы уравнений состояния
Здесь переменные состояния – фазовые координаты.
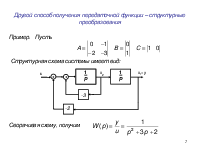
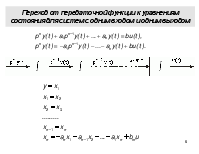
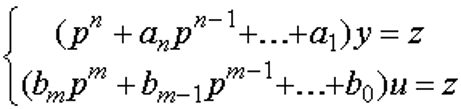
Другая форма: в правой части уравнения содержатся производные от входного воздействия


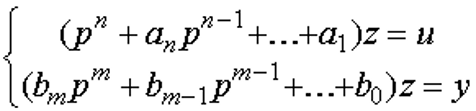
Введем переменные состояния:
Здесь координаты состояния xi – абстрактные переменные.
Этим уравнениям соответствует структура:
Возможно другое представление:

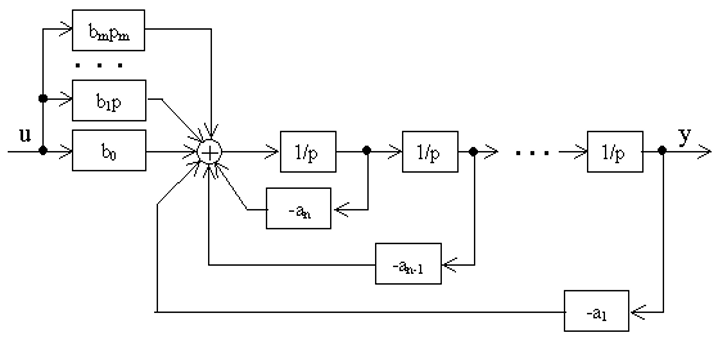
Структурная схема может быть преобразована к виду:
Тогда матрицы A, B, C в уравнениях состояния будут:
Это — наблюдаемая каноническая форма уравнений состояния.
Таким образом, переход от передаточной функции к описанию в переменных состояния является неоднозначным.
Другие канонические формы уравнений состояния.
В двух последних формах матрица А – диагональная.
- Преимущества структурной модели :
- наглядное представление понятия «состояние систем»,
- однозначно представляется структура взаимодействий
- между переменными в виде системы с обратными связями,
- структурные модели полезны при моделировании САУ
- на аналоговых или цифровых вычислительных машинах.
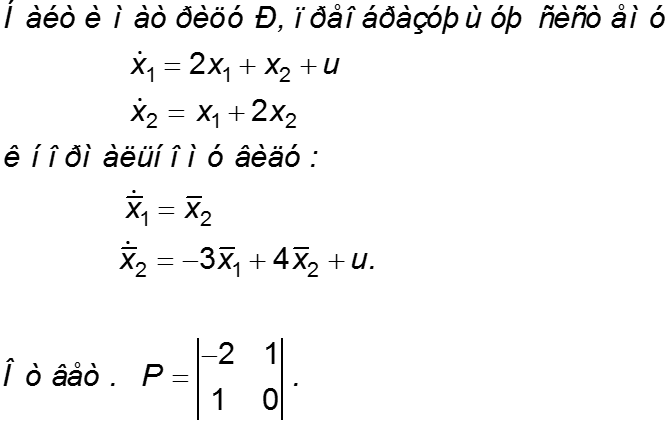
Пример получения уравнений состояния
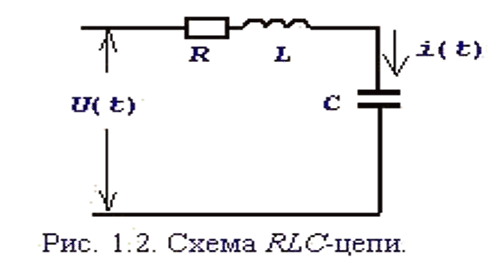
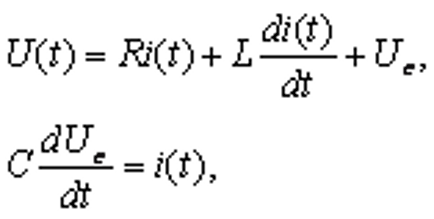
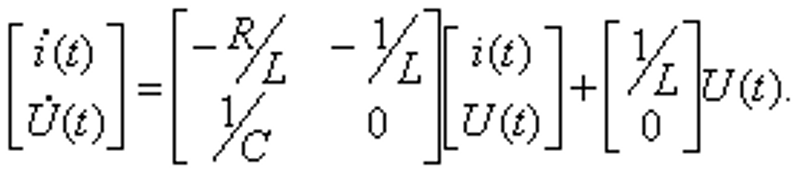
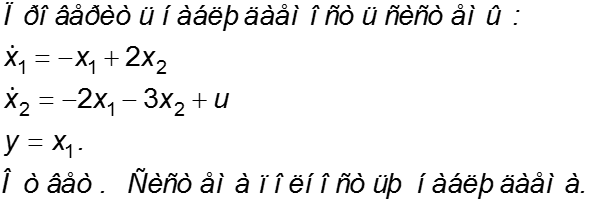
П р и м е р. Система описывается дифференциальным уравнением Составим уравнения состояния и структурную схему
Свойства объектов и систем управления. Управляемость .
Определение. Система полностью управляема, если она может быть переведена из любого начального состояния x(0) в начало координат (0, 0,…,0) под действием управления u(t) за конечное время. Теорема Калмана об управляемости. Состояние непрерывной системы управляемо, если и только если ранг матрицы NУ = [B | AB | A2B | . | An-1B] равен размерности пространства состояний n.
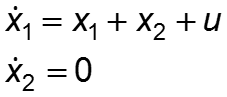
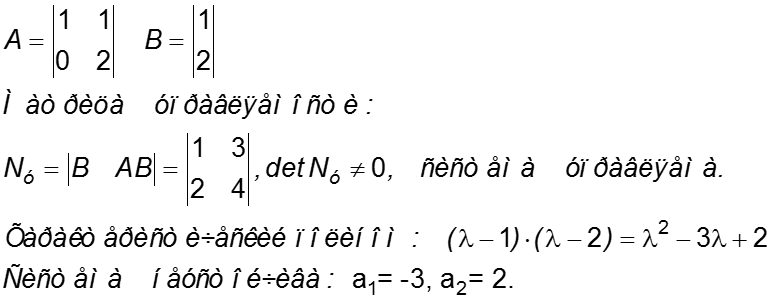
Пример 1. Проверим, управляема ли система:
Пример 2. Также проверим управляемость системы:
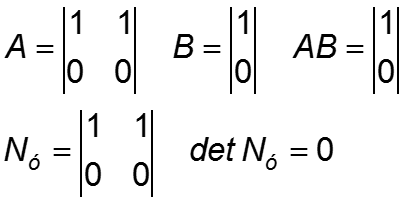
Т.к. rangNy = 1 , система управляема неполностью. Порядок управляемой части равен 1.
В такой системе есть “висячая” часть на входе.
В случае представления объекта управления моделью типа “вход — выход” условием его управляемости является отсутствие общих корней полиномов А(p) и B(p): Т.е. система управляема, если алгебраические уравнения A(p)=a0pn+a1pn-1+…+an = 0, B(p)=b0pm+b1pm-1+…+bm = 0 не имеют общих корней.

Пример 2. Определим управляемость системы, имеющей передаточную функцию

Прямой расчет корней числителя и знаменателя дает результаты, приведенные в табл.
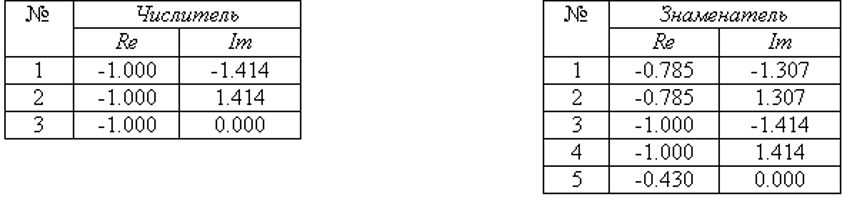
Таким образом, числитель и знаменатель передаточной функции W(p) имеют два общих корня (-1 -j1.414) и ( -1+j 1.414). Значит, система не управляема. Изменение значений корней для этих пар в числителе или знаменателе переведет систему в ранг управляемых.
- Для осуществления управления необходимо иметь информацию о текущем состоянии системы, т.е. о значениях вектора состояния x(t) в каждый момент времени.
- Однако некоторые из переменных состояния являются абстрактными, не имеют физических аналогов в реальной системе или же не могут быть измерены. Измеряемыми и наблюдаемыми являются физические выходные переменные y(t).
- Таким образом, возникает вопрос: можно ли определить вектор состояния по измеряемому вектору выхода и вектору входа?
- Определение. Система называется полностью наблюдаемой, если по результатам измерения входных u(t) и выходных y(t) переменных можно однозначно определить все составляющие вектора x(t) на конечном интервале времени.
- Теорема Калмана о наблюдаемости. Система наблюдаема, если и только если ранг матрицы
- Nн = [CT | ATCT | (AT)2CT | . | (AT)n-1CT].
- равен размерности пространства состояний.
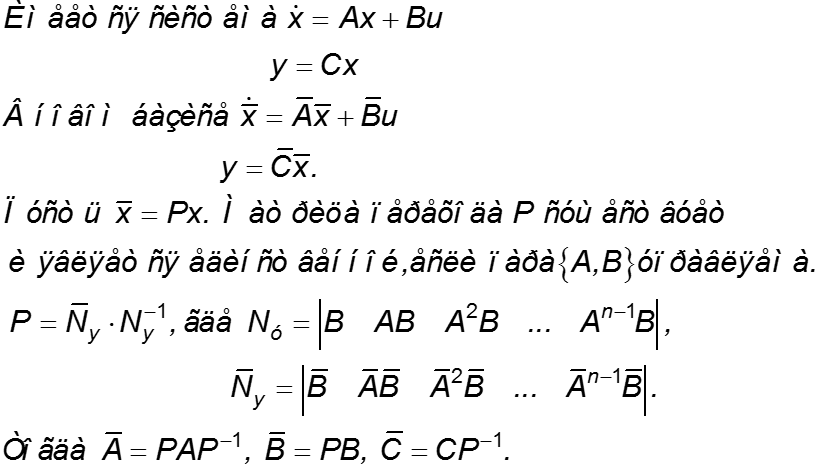
Изменение базиса в уравнениях состояния
О синтезе системы
- Синтез системы — это направленный расчет, цель
- которого :
- построение рациональной структуры системы;
- нахождение оптимальных значений параметров отдельных звеньев.
- Качество управления можно описать двумя способами.
- Первый способ предусматривает или непосредственное задание динамических характеристик выходных координат системы при типовых воздействиях, или задание совокупности прямых и косвенных показателей качества (значение перерегулирования, времени регулирования, статической ошибки, частоты среза, полосы пропускания и т.д.).
- Второй способ основан на введении некоторого обобщенного функционала, определяемого всеми переменными системы управления u(t), x(t), y(t).
- В теории линейных систем управления широко используются оба указанных способа.
- Если передаточная функция системы не имеет нулей, то при выборе ее желаемого полинома D(p) можно руководствоваться стандартными формами (фильтрамиЧебышева, Баттерворта и др.)
- Стандартные формы определяют коэффициенты характеристического полинома , обеспечивающие в системе переходные и частотные характеристики с известными показателями качества.
- Если же система характеризуется наличием нулей, стандартные формы могут служить в качестве исходного материала для поиска своего оптимального расположения корней.
- Одним из основных методов проектирования детерминированных систем управления в пространстве состояний является метод расположения полюсов.
Распределение полюсов системы управления
- Рассмотрим систему с одним входом и одним выходом.
- Требуемое качество процессов может быть достигнуто заданием распределения полюсов замкнутой системы на комплексной плоскости.
- Для системы
- полюса системы — это собственные значения матрицы А или корни ее характеристического уравнения
- Если уравнения объекта заданы в нормальной форме (Фробениуса), то матрица обратных связей по состоянию
- Покажем это:

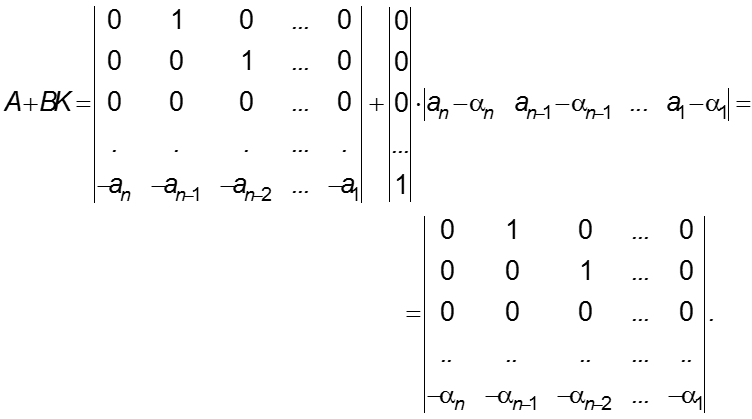
Нормальная форма матрицы А:
Пусть желаемые полюсы : λ1= -3, λ2= -2 Желаемый характеристический полином: φ=(λ+3)(λ+1)= λ 2+4 λ +3; α1=4, α2=3. Тогда k1 = a2 — α2 = 2 — 3 = -1, k2 = a1- α1 = -3 — 4 = -7. K = |-1 -7| Следовательно: v = u — x1 -7×2 Вычислив матрицу перехода P от исходной к нормальной форме можно получить матрицу обратной связи для исходного представления
http://ets.ifmo.ru/tolmachev/ouems/lec4/lec4.htm
http://vunivere.ru/work86624