Колебательное движение. Свободные колебания. Колебательные системы (Ерюткин Е.С.)
Этот видеоурок доступен по абонементу
У вас уже есть абонемент? Войти

Тема данного урока: «Колебательное движение. Свободные колебания. Колебательные системы». Вначале дадим определение нового вида движения, который мы начинаем изучать, – колебательного движения. Рассмотрим в качестве примера колебания пружинного маятника и определим понятие свободных колебаний. Также изучим, что такое колебательные системы, и обсудим условия, необходимые для существования колебаний.
Свободные колебания пружинного маятника. Общие сведения

Цель работы. Ознакомиться с основными характеристиками незатухающих и затухающих свободных механических колебаний.
Задача. Определить период собственных колебаний пружинного маятника; проверить линейность зависимости квадрата периода от массы; определить жесткость пружины; определить период затухающих колебаний и логарифмический декремент затухания пружинного маятника.
Приборы и принадлежности. Штатив со шкалой, пружина, набор грузов различной массы, сосуд с водой, секундомер.
1. Свободные колебания пружинного маятника. Общие сведения
Колебаниями называются процессы, в которых периодически изменяется одна или несколько физических величин, описывающих эти процессы. Колебания могут быть описаны различными периодическими функциями времени. Простейшими колебаниями являются гармонические колебания – такие колебания, при которых колеблющаяся величина (например, смещение груза на пружине) изменяется со временем по закону косинуса или синуса. Колебания, возникающие после действия на систему внешней кратковременной силы, называются свободными.
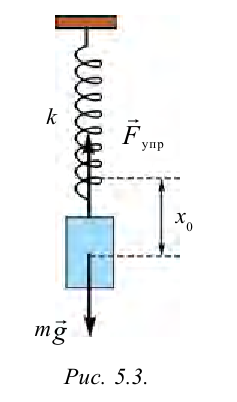
Рассмотрим одну из простейших колебательных систем – пружинный маятник, представляющий собой груз массой m, подвешенный на абсолютно упругой пружине с коэффициентом жесткости k
(рис. 1). Пусть l0 – длина пружины без подвешенного к ней груза. При подвешивании груза под действием силы тяжести пружина растянется на x1 так, что маятник будет находиться в положении равновесия вследствие равенства модулей силы тяжести mg и упругой силы Fупр: mg = kx1, стремящейся вернуть груз в положение равновесия (полагается, что деформации пружины идеально упругие и подчиняются закону Гука).


Если груз вывести из положения равновесия, отклонив на величину x, то сила упругости возрастает: Fупр = – kx2= – k(x1 + x). Дойдя до положения равновесия, груз будет обладать отличной от нуля скоростью и пройдет положение равновесия по инерции. По мере дальнейшего движения будет увеличиваться отклонение от положения равновесия, что приведет к возрастанию силы упругости, и процесс повторится в обратном направлении. Таким образом, колебательное движение системы обусловлено двумя причинами: 1) стремлением тела вернуться в положении равновесия и 2) инерцией, не позволяющей телу мгновенно остановиться в положении равновесия. В отсутствии сил трения колебания продолжались бы сколь угодно долго. Наличие силы трения приводит к тому, что часть энергии колебаний переходит во внутреннюю энергию и колебания постепенно затухают. Такие колебания называются затухающими.
Незатухающие свободные колебания
Сначала рассмотрим колебания пружинного маятника, на который не действуют силы трения – незатухающие свободные колебания. Согласно второму закону Ньютона c учетом знаков проекций на ось X
 (1)
(1)
Из условия равновесия смещение, вызываемое силой тяжести:  . Подставляя
. Подставляя  в уравнение (1), получим:
в уравнение (1), получим:  . Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
. Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
 . (2)
. (2)
Это уравнение называется дифференциальным уравнением гармонических колебаний пружинного маятника. Из этого уравнения следует, что после прекращения внешнего воздействия, приводящего к первоначальному отклонению системы от положения равновесия, движение груза обусловлено только действием упругой силы (сила тяжести вызывает постоянное смещение).
Общее решение однородного дифференциального уравнения второго порядка (2) имеет вид
 . (3)
. (3)
Данное уравнение называется уравнением гармонических колебаний. Наибольшее отклонение груза от положения равновесия А0 называется амплитудой колебаний. Величина  , стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
, стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
 (4)
(4)
есть круговая или циклическая частота собственных колебаний, связанная с периодом колебаний Т соотношением  . Период колебаний определяется
. Период колебаний определяется
 . (5)
. (5)
Рассмотрим свободные колебания пружинного маятника при наличии силы трения (затухающие колебания). В простейшем и вместе с тем наиболее часто встречающемся случае сила трения пропорциональна скорости υ движения:
где r – постоянная, называемая коэффициентом сопротивления. Знак минус показывает, что сила трения и скорость имеют противоположные направления. Уравнение второго закона Ньютона в проекции на ось Х при наличии упругой силы и силы трения
Данное дифференциальное уравнение с учетом υ = dx/dt можно записать
 , (8)
, (8)
где  – коэффициент затухания; – циклическая частота свободных незатухающих колебаний данной колебательной системы, т. е. при отсутствии потерь энергии (β = 0). Уравнение (8) называют дифференциальным уравнением затухающих колебаний.
– коэффициент затухания; – циклическая частота свободных незатухающих колебаний данной колебательной системы, т. е. при отсутствии потерь энергии (β = 0). Уравнение (8) называют дифференциальным уравнением затухающих колебаний.
Чтобы получить зависимость смещения x от времени t, необходимо решить дифференциальное уравнение (8). В случае малых затуханий ( ) решение уравнения можно записать следующим образом:
) решение уравнения можно записать следующим образом:
 , (9)
, (9)
где А0 и φ0 – начальная амплитуда и начальная фаза колебаний;
 – циклическая частота затухающих колебаний при ω >>
– циклическая частота затухающих колебаний при ω >>  ω ≈ ω0.
ω ≈ ω0.
Движение груза в этом случае можно рассматривать как гармоническое колебание с частотой ω и переменной амплитудой, меняющейся по закону:
 . (10)
. (10)
На графике функции (9), рис. 2, пунктирными линиями показано изменение амплитуды (10) затухающих колебаний.

Рис. 2. Зависимость смещения х груза от времени t при наличии силы трения
Для количественной характеристики степени затухания колебаний вводят величину, равную отношению амплитуд, отличающихся на период, и называемую декрементом затухания:
 . (11)
. (11)
Часто используют натуральный логарифм этой величины. Такой параметр называется логарифмическим декрементом затухания:
 . (12)
. (12)
Если за время t‘ амплитуда уменьшается в n раз, то из уравнения (10) следует, что
 . (13)
. (13)
Отсюда для логарифмического декремента получаем выражение
 . (14)
. (14)
Если за время t‘ амплитуда уменьшается в е раз (е = 2,71 – основание натурального логарифма), то система успеет совершить число колебаний
 . (15)
. (15)
Следовательно, логарифмический декремент затухания – величина, обратная числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в е раз. Чем больше θ, тем быстрее происходит затухание колебаний.
2. Методика эксперимента и экспериментальная установка

Рис. 3. Схема установки
Установка состоит из штатива 1 с измерительной шкалой 2. К штативу на пружине 3 подвешиваются грузы 4 различной массы. При изучении затухающих колебаний в задании 2 для усиления затухания используется кольцо 5, которое помещается в прозрачный сосуд 6 с водой.
В задании 1 (выполняется без сосуда с водой и кольца) в первом приближении затуханием колебаний можно пренебречь и считать гармоническими. Как следует из формулы (5) для гармонических колебаний зависимость T 2 = f (m) – линейная, из которой можно определить коэффициент жесткости пружины k по формуле
 , (16)
, (16)
где  – угловой коэффициент наклона прямой T 2 от m.
– угловой коэффициент наклона прямой T 2 от m.
Задание 1. Определение зависимости периода собственных колебаний пружинного маятника от массы груза.
1. Определить период колебаний пружинного маятника при различных значениях массы груза m. Для этого с помощью секундомера для каждого значения m трижды измерить время t полных n колебаний (n ≥10) и по среднему значению времени  вычислить период
вычислить период  . Результаты занести в табл. 1.
. Результаты занести в табл. 1.
2. По результатам измерений построить график зависимости квадрата периода T2 от массы m. Из углового коэффициента графика определить жесткость пружины k по формуле (16).
Результаты измерений для определения периода собственных колебаний
 , с
, с
 , с
, с
Пружинные и математические маятники в физике — виды, формулы и определения с примерами
Содержание:
Пружинные и математические маятники:
Тело или система тел, совершающие периодические колебательные движения, называются маятниками. Большинство колебательных движений, встречающихся в природе, напоминают движение пружинных и математических маятников.
Система, состоящая из груза массой 

Если немножко растянуть пружину и отпустить, то груз придет в колебательное движение в вертикальном направлении.
С помощью опытов мы определили, что смещение груза в зависимости от времени изменяется следующbм образом:
Если учесть, что ускорение тела, совершающего гармонические колебания  , то уравнение (5.10) примет вид:
, то уравнение (5.10) примет вид:
Из этого уравнения мы имеем:

Значит, частота циклического колебания тела, совершающего гармоническое колебание, зависит от параметров тел, входящих в систему колебания. Формула (5.12) называется формулой для
определения циклической (периодической) частоты пружинного маятника .
.
Период колебания пружинного маятника прямо пропорционален выведенному из-под квадратного корня значению массы груза и обратно пропорционален выведенному из-под квадратного корня значению упругости пружины.
Рассмотрим обмен энергиями в пружинном маятнике. Кинетическая энергия маятника, если не учитывать массу пружины, равна кинетической энергии груза,  . В предыдущих темах было показано, что скорость можно выразить формулой
. В предыдущих темах было показано, что скорость можно выразить формулой  . В таком случае кинетическая энергия маятника равна
. В таком случае кинетическая энергия маятника равна

Потенциальная энергия пружинного маятника равна энергии деформации пружины, т.е.:

В большинстве случаев важно знать полную энергию системы:

Если учесть, что  ,
,


Обратите внимание, что полная энергия пружинного маятника является постоянной величиной, не зависящей от времени, т.е. соблюдается выполнение закона сохранения механической энергии.
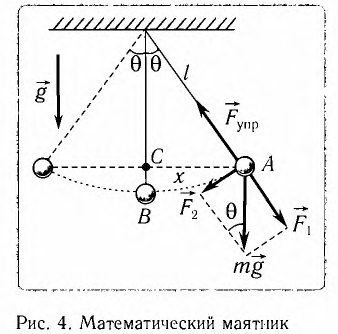
Материальная точка, подвешенная на нерастяжимой и невесомой нити и совершающая периодическое колебательное движение вокруг равновесного состояния, называется математическим маятником.
Когда маятник находится в устойчивом равновесном состоянии, вес материальной точки  уравновешивает силу натяжения
уравновешивает силу натяжения  (рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол
(рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол  , силы
, силы  и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
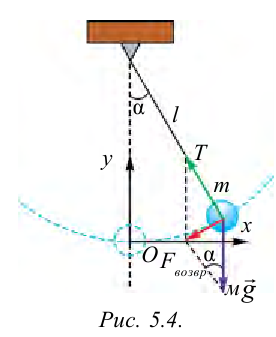
Из рис. 5.4. видим, что:

Согласно второму закону Ньютона, сила  придает материальной точке ускорение
придает материальной точке ускорение  , поэтому
, поэтому

Из-за того, что угол наклона очень маленький  , а сила
, а сила  направлена противоположно смещению, формулу (5.19) можно записать в виде
направлена противоположно смещению, формулу (5.19) можно записать в виде

Если смещение материальной точки (шарика) во время колебательного процесса отметить буквой  и учитывать соотношение
и учитывать соотношение  , получим
, получим 
Следовательно 
Исходя из смысла периода колебания и учитывая, что  получаем
получаем

Эта формула, определяющая период колебания математического маятника, называется формулой Гюйгенса. Отсюда вытекают следующие законы математического маятника:
- при маленьких углах наклона (а) математического маятника, его период колебания не зависит от амплитуды колебания.
- период колебания математического маятника также не зависит от массы подвешенного на него груза;
- период колебания математического маятника прямо пропорционален выведенному из-под квадратного корня значению длины маятника и обратно пропорционален выведенному из-под квадратного корня значению ускорения свободного падения.
Отсюда колебание математического маятника записывается следующим выражением:
Следует отметить, что когда амплитуда колебания или угол наклона велики, колебания математического маятника не являются гармоническим. В этом случае нельзя считать  и для решения уравнения движения не применяется закон синусов или косинусов.
и для решения уравнения движения не применяется закон синусов или косинусов.
Пример:
Период колебания первого маятника равен 3 сек, второго – 4 сек. Найдите период колебания маятника с длиной, равной сумме длин этих маятников.

Решение: 
Ответ: 5 cек.
Пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  , возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
, возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)  :
:

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Рассмотрим пружинный маятник, представляющий собой колебательную систему, образованную грузом на пружине.
Пусть груз массой т, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу невесомой пружины жесткостью k (рис. 3). Второй конец пружины закреплен относительно данной инерциальной системы отсчета (ИСО).
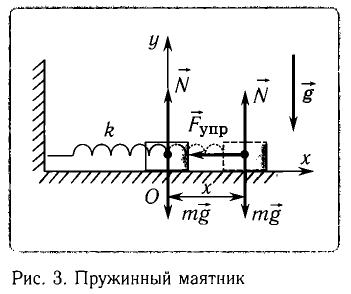
Выведем груз из положения равновесия, сместив его на расстояние х вправо. В пружине возникнет сила упругости  направленная влево.
направленная влево.
Запишем второй закон Ньютона для движения груза:

В проекции на ось Ох действующих на груз сил с учетом закона Гука получаем
 или
или 
Это уравнение аналогично уравнению гармонических колебаний
Сравнивая эти два уравнения, находим циклическую частоту колебаний пружинного маятника:
Тогда период колебаний пружинного маятника можно найти по формуле
Как следует из полученной формулы, период колебаний пружинного маятника не зависит от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов  , — равный и
, — равный и  — время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
— время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения грузика, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Математическим маятником называется материальная точка массой т, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 4).
Математический маятник — это идеализированная модель реального маятника при условии, что длина нити намного больше размеров подвешенного на ней тела и масса нити намного меньше массы тела. Кроме того, деформацией нити можно пренебречь.
Галилео Галилей экспериментально определил, что период малых колебаний (9
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://pandia.ru/text/77/494/49063.php
http://www.evkova.org/pruzhinnyie-i-matematicheskie-mayatniki-v-fizike