Автоколебания в механических системах
Моделирование уравнения Ван-дер-Поля и Брюсселятор
уравнения Ван-дер-Поля
В качестве модели, описывающей автоколебания в радиотехническом генераторе, рассмотрим уравнение Ван-дер-Поля.
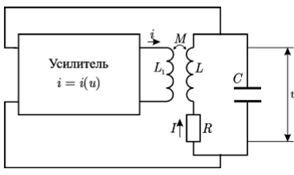
Рисунок. Общий вид генератора.
А это уравнение Ван-дер-Поля. Обыкновенное дифференциальное уравнение второго порядка с параметром \(\lambda\).
\( y» + (\lambda — y’^2)y’ + y = 0 \)
Для моделирования переходных процессов придётся свести данное уравнение к системе в нормальной форме. Введём новые переменные:
\begin
Тогда в новых обозначениях, получим систему ОДУ 1-го порядка:
\begin
Найдём особые точки данной системы: то есть точки, в которых скорости нулевые:
\begin
Итак, нашлась всего одна особая точка \( (z_1, z_2) = (0,0) \) , или в исходных обозначениях: \( y=y’=0 \).
Данная точка является:
- устойчивым узлом при \(\lambda 2\)
Кроме того, в данной системе наблюдается возникновение предельных циклов.
Рассмотрим, как меняется поведедение системы в зависимости от значений параметра \(\lambda\)
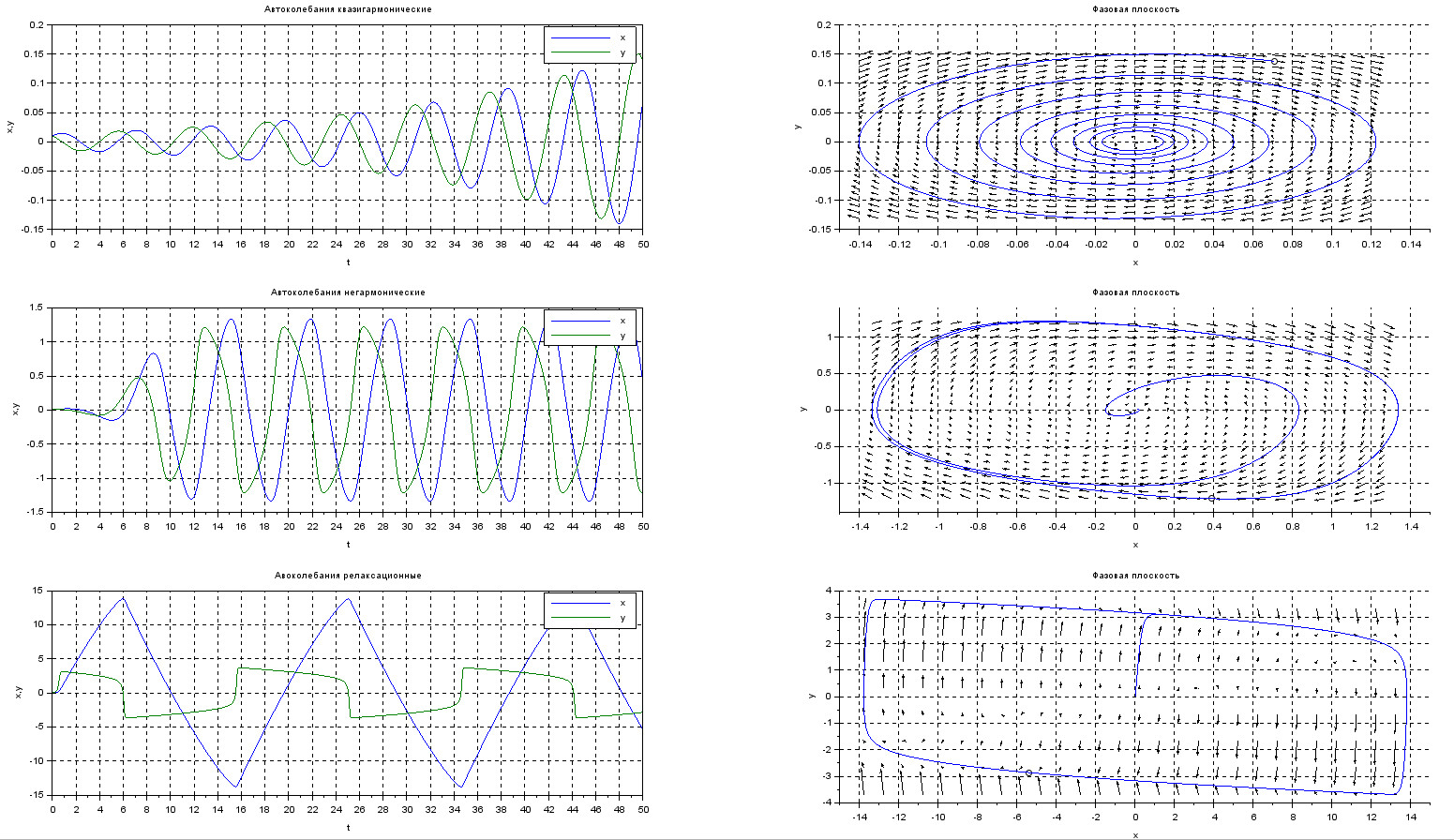
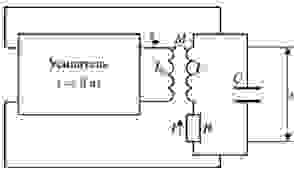
Решение системы Ван-дер-Поля. Справа — временная развёртка, справа — фазовые портреты для лямбда =
Химические колебания. Брюсселятор
Для погружения в циклическую генерацию решений, мы рассмотрим простой модельный пример: гипотетическую химическую реакцию, которая получила название Брюсселятор . Уравнения этой реакции имеют вид:
\begin
Кинетические уравнения для данной системы будут иметь вид:
\begin
Заведём новые переменные, чтобы не перегружать систему параметрами:
\begin
Тогда кинетические уравнения преобразуются к виду:
\begin
Замоделируем поведение решений системы ОДУ с различными параметрами и начальными условиями.
Приведённый ниже код включает в себя несколько примеров, рассмотренных ранее: использование циклов, обращение к графикам на координатной сетке, как к потомкам объекта axes, а также, задание цвета в формате rgb, где значения каждого из параметров генерируются случайным образом.
ВАН ДЕР ПОЛЯ УРАВНЕНИЕ
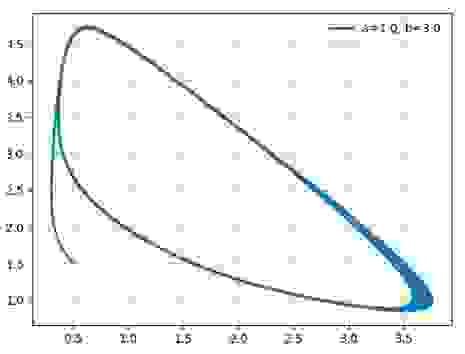
ВАН ДЕР ПОЛЯ УРАВНЕНИЕ — нелинейное обыкновенное дифференциальное уравнение 2-го порядка

Является важным частным случаем Льенара уравнения. В. д. П. у. описывает свободные автоколебания одной из простейших нелинейных колебательных систем (осциллятора Ван дер Поля). В частности, уравнение (1) служит математич. моделью (при ряде упрощающих предположений) лампового генератора на триоде в случае кубич. характеристики лампы. Характер решений уравнения (1) был впервые подробно изучен Б. Ван дер Полем (см. [1]).
Уравнение (1) эквивалентно системе двух уравнений относительно фазовых переменных х, v:

Иногда вместо х удобнее ввести переменную z (t) = ∫ t 0 х (τ) dτ; тогда уравнение (1) приведется к уравнению
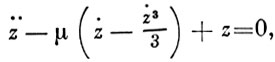
являющемуся частным случаем Рэлея уравнения. Если вместе с переменной х рассмотреть переменную 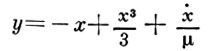 , ввести новое время τ = i/μ и положить
, ввести новое время τ = i/μ и положить
ε = μ 2 , то вместо уравнения (1) получим систему

При любом μ > 0 в фазовой плоскости системы (2) существует единственный устойчивый предельный цикл, к к-рому при t → ∞ приближаются все остальные траектории (кроме положения равновесия в начале координат); этот предельный цикл адекватен автоколебаниям осциллятора Ван дер Поля (см. [2]-[4]).
При малых μ автоколебания осциллятора (1) близки к простым гармоническим колебаниям (см. Нелинейные колебания) с периодом 2π и с определенной амплитудой. Для вычисления колебательного процесса с большей точностью применяются асимптотич. методы. При возрастании μ автоколебания осциллятора (1) все более отклоняются от гармонич. колебаний. При больших μ уравнение (1) описывает релаксационные колебания с периодом (в первом приближении) 1,614 μ. Известны более точные асимптотич. разложения величин, характеризующих релаксационные колебания (см. [5]); изучение этих колебаний равносильно исследованию решений системы (3) с малым параметром ε при производной (см. [6]).

описывает поведение осциллятора Ван дер Поля под воздействием внешнего периодич. возмущения. Здесь наиболее важны изучение явления захватывания частоты (существования периодич. колебаний) и исследование биений (возможности почти периодич. колебаний; см. [2], [4]).
Лит.: [1] Van der Рol В., «Phil. Mag.», 1922, ser. 6, v. 43, p. 700-19; 1926, ser. 7, v. 2, p. 978-92; [2] Андронов А. А., Витт A. A., Xайкин С. Э., Теория колебаний, 2 изд., М., 1959; [3] Лефшец C., Геометрическая теория дифференциальных уравнений, пер. с англ., М., 1961; [4] Стокер Дж., Нелинейные колебания в механических и электрических системах, пер. с англ., 2 изд., М., 1953; [5] Дородницын А. А., «Прикл. матем. и механика», 1947, т. 11, с. 313-28; [6] Мищенко Е. Ф., Розов Н. X., Дифференциальные уравнения с малым параметром и релаксационные колебания, М., 1975.
- Математическая Энциклопедия. Т. 1 (А — Г). Ред. коллегия: И. М. Виноградов (глав ред) [и др.] — М., «Советская Энциклопедия», 1977, 1152 стб. с илл.
Автоколебания и резонанс
Здравствуйте!
В связи с вопросами читателей моей публикации [1] касательно условий возбуждения автоколебаний в механической системе, я решил описать явление возникновения и поддержания автоколебаний подробно, выделив основные области возникновения и применения автоколебаний.
В википедии автоколебания объясняют так [2]:
Незатухающие колебания в диссипативной динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии постоянного, то есть непериодического внешнего воздействия.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы. При этом частота становится почти равной резонансной.
Автоколебания в технике
Автоколебательная система с запаздыванием (на примере электромеханического звонка)
Приведём пример электромеханического звонка:
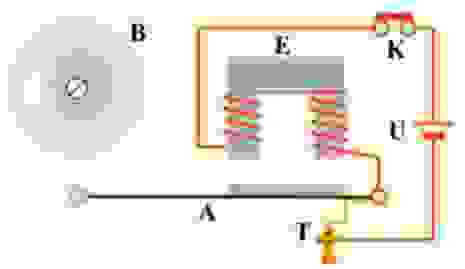
При замыкании цепи кнопкой (К) электромагнит (Е) притягивает ударник, ударник бьёт по звонку и размыкает цепь питания электромагнита, механически связанным с ним контактом (Т) ударник (А) возвращается назад и процесс повторяется.
При рассмотрении процесса возникновения автоколебаний будем считать, что сила, действующая на боёк (А) звонка, изменяется пропорционально изменению тока в RL цепи.
Такое допущение сделано для упрощения рассмотрения, поскольку зависимость силы от тока в обмотке и зазора между бойком и полюсами значительно сложнее [3].
Ниже приведены конструкции электромеханических звонков и их упрощённая электрическая схема:
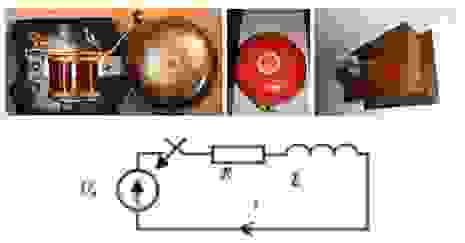
Боёк колеблется относительно установленного зазора согласно соотношению A*sin (w*t).
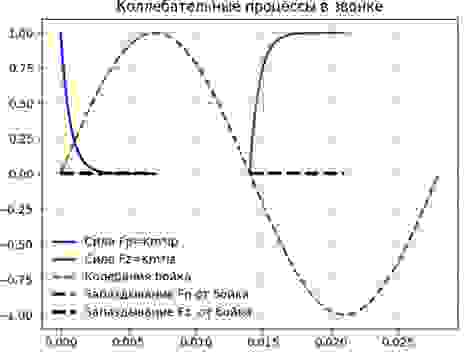
Решив численным методом дифференциальное уравнение RL цепи с начальными условиями
для замыкания и размыкания контакта, наложив на эти решения колебания бойка, получим:
Для приближенной теории будем считать, что сила Fτ, выраженная последовательностью прямоугольных импульсов, которые возникает и исчезает мгновенно, но не в момент срабатывания контакта, а с запаздыванием τ=L/R. Добавим Fτ на график, получим:
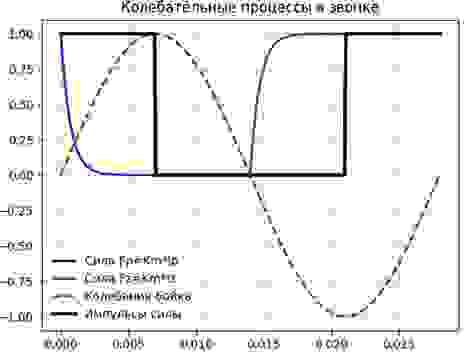
Обозначим амплитуду силы Fτ через Aτ, получим разложения этой силы в ряд Фурье [4] (учитывая что x=a∙sin(ω∙t), для первых двух членов ряда:
Будем считать, что постоянная составляющая силы Aτ/2 компенсируется регулировкой.
Тогда уравнение для колебаний бойка с учётом его приведенной массы m, трения r и изгибной жёсткости k примет вид:
 (1)
(1)
Разделим обе части на массу бойка, введем обозначения,  получим:
получим:
 (2)
(2)
Для того, чтобы получить аналитические соотношения для частоты и амплитуды колебаний бойка, решим (2) приближённым методом [5]. Преобразуем (2) к виду:
 (3)
(3)
Подставив в (3)  при условии:
при условии: 
пропуская промежуточные выкладки получим соотношения для частоты и амплитуды автоколебаний:
На основании приведенных соотношений можно сделать вывод, что, при отсутствии самоиндукции, звонок работать не может, поскольку при L=0 нет запаздывания τ=0. Таким образом, при нулевом запаздывании автоколебания не возможны.
Автоколебания в измерительной технике (на примере механического резонатора вибрационных плотномеров)
Механические резонаторы в виде трубок пластин или цилиндров широко используются в вибрационных плотномерах, внешний вид которых приведен на рисунках:


Будем рассматривать резонатор c сосредоточенными эквивалентными параметрами: массой  жесткостью
жесткостью  и трением, характеризуемым коэффициентом
и трением, характеризуемым коэффициентом 
Такая замена вполне допустима в ограниченной области частот при соблюдении равенства собственных частот колебаний обеих систем, а также равенства потерь энергии и обусловленных ими затуханий.
Запишем систему уравнений, описывающих движение резонатора в замкнутой системе возбуждения:

где: F- сила воздействия системы возбуждения на резонатор;
D(x)- неизвестный оператор обратной связи, подлежащий определению; Fупр — упругая восстанавливающая сила резонатора, которая в общем случае может описываться нелинейной функцией; х — поперечное смещение эквивалентной массы.
Воспользуемся выражением кубической упругой характеристики резонатора:

где γ — коэффициент, характеризующий отклонение реальной упругой характеристики от линейной.
Преобразуем записанную систему равенства к виду:

где  — нелинейная составляющая упругой силы.
— нелинейная составляющая упругой силы.
Структурная схема автоколебательной системы, работа которой характеризуется уравнениями, (1) приведена на рисунке:
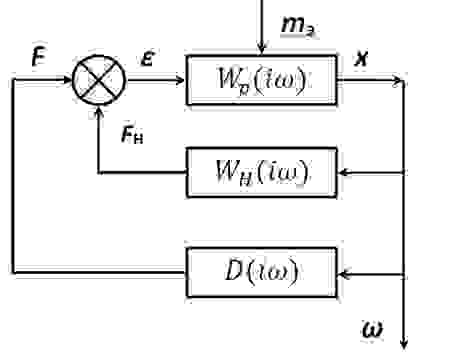
Схема содержит нелинейное звено, выполняющее функцию корректирующей обратной связи линейного резонатора, имеющего частотную характеристику:

Для решения задачи синтеза оптимальной системы возбуждения, воспользуемся методом гармонической линеаризации [6].
Механические резонаторы являются высокодобротными колебательными системами, которые можно рассматривать как узкополосные фильтры с выходным сигналом вида: x
A∙cos(ω∙τ), где A— амплитуда колебаний резонатора; ω — частота колебаний, близкая к резонансной [7].
Поэтому для нелинейного элемента справедливо соотношение:

Пренебрегая третьей гармоникой, отфильтрованной линейной частью резонатора, частотную характеристику линеаризованного звена нелинейной упругости механического резонатора можно в виде:

Рассмотрим уравнение для первой гармоники колебаний линеаризованной системы:
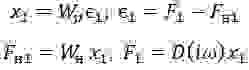
Для определения вида частотной характеристики D(iω), обеспечивающей совместность этой системы, исключим промежуточные переменные прямой подстановкой их выражений через другие переменные. В результате получим:

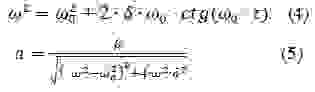
Из соотношения (2) определим смещение фазы, осуществляемое системой возбуждения:

Нетрудно установить, что частота автоколебаний не будет зависеть от трения  при сдвиге фазы φ=π/2, тогда:
при сдвиге фазы φ=π/2, тогда:

При этом условии из (2) следует, что система возбуждения должна быть дифференцирующим звеном D(iω)=(i*rэ* ω) т.е.

Из (5) следует, что частотная характеристика цепи обратной связи системы возбуждения должна быть пропорциональна коэффициенту трения
Система возбуждения состоит из трех элементов, D(iω)=Dп* Dу* D(в ), характеризующих частотные характеристики: приемника Dп, усилителя Dу и возбудителя D(в ) колебаний. Приемник является дифференцирующим – Dп=Kп* i*ω, а возбудитель усилительным
звеном – Dв=Kв.
Для выполнения условия (5) усилитель должен иметь частотную характеристику:

Коэффициент усиления должен меняться вместе с изменением трения
Звено с переменным коэффициентом усиления можно реализовать простейшей нелинейностью типа двухпозиционного реле, имеющей частотную характеристику по первой гармонике [6]:

где  — амплитуда первой гармоники на входе усилителя;
— амплитуда первой гармоники на входе усилителя;  — выходное напряжение усилителя, подаваемое на возбудитель колебаний.
— выходное напряжение усилителя, подаваемое на возбудитель колебаний.
Из (6) и (7) можно получить выражение для амплитуды установившихся автоколебаний резонатора:

Для устранения этого влияния амплитуды на частоту резонатора можно стабилизировать амплитуду A варьированием напряжения U0 с помощью регулятора, стабилизирующего амплитуду входного сигнала Aвх, поступающего с приемника колебаний.
Из изложенного можно сделать вывод, что частота автоколебаний резонатора вибрационного измерительного преобразователя не будет зависеть от трения при сдвиге фазы φ=π/2, когда система возбуждения является дифференцирующим звеном, и не будет зависит от амплитуды автоколебаний при стабилизации входного сигнала этого звена.
Автоколебания в радиотехнических генераторах (на примере решения уравнения
Ван-дер-Поля)
Обобщённая схема радиотехнического генератора автоколебаний приведена на рисунке:
Механизм возбуждения автоколебаний в генераторе можно качественно описать следующим образом. Даже при отсутствии напряжения на выходе усилителя напряжение в контуре испытывает случайные флуктуации. Они усиливаются усилителем и вновь поступают в контур через цепь обратной связи.
При этом из шумового спектра флуктуаций будет выделяться составляющая на собственной частоте высокодобротного контура. Если энергия, вносимая в контур таким образом, превосходит энергию потерь, амплитуда колебаний нарастает.
Основной моделью, описывающей автоколебания в радиотехническом генераторе, является уравнение Ван-дер-Поля. Приведём уравнение Ван-дер-Поля к виду, содержащему единственный управляющий параметр с безразмерными переменными:

Получим фазовые портреты (слева) и временные реализации колебаний (справа) осциллятора Ван-дер-Поля: λ =0.1, λ =1.1
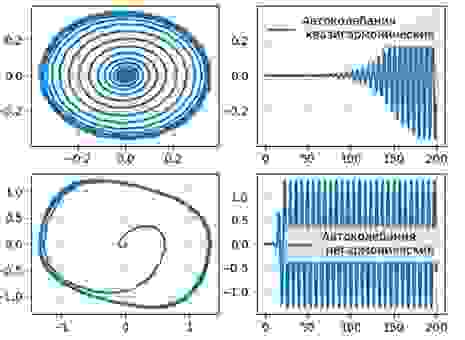
Для λ =10.0
Уравнение Ван-дер-Поля имеет единственную особую точку  , которая является устойчивым узлом при
, которая является устойчивым узлом при  устойчивым фокусом при
устойчивым фокусом при  неустойчивым фокусом при
неустойчивым фокусом при  и неустойчивым узлом при
и неустойчивым узлом при  . Если выполнено условие самовозбуждения, на фазовой плоскости имеется также предельный цикл, отвечающий режиму периодических автоколебаний.
. Если выполнено условие самовозбуждения, на фазовой плоскости имеется также предельный цикл, отвечающий режиму периодических автоколебаний.
Химические колебания. Брюсселятор
Важным и нетривиальным примером автоколебательных процессов служат некоторые химические реакции. Химические колебания — это колебания концентраций реагирующих веществ.
К настоящему времени известно достаточно много колебательных реакций. Наиболее знаменитая из них была открыта Б.П. Белоусовым в 1950 г. и позднее детально изучена А.М. Жаботинским. Реакция Белоусова — Жаботинского (БЖ) представляет собой процесс окисления малоновой кислоты при взаимодействии в присутствии ионов в качестве катализатора.
В ходе реакции раствор периодически изменяет свой цвет: голубой — красный — голубой — красный и т.д. Кроме простых периодических колебаний, реакция БЖ демонстрирует (в зависимости от условий эксперимента) множество различных типов пространственно-временной динамики, которые окончательно еще не исследованы.
Предложены различные математические модели реакции БЖ (например, модель Филда, Кереса и Нойеса — «орегонатор»), однако ни одна из них не описывает полностью все детали, наблюдаемые в эксперименте.
Мы рассмотрим более простой модельный пример: гипотетическую химическую реакцию, которая получила название Брюсселятор [8]. Уравнения этой реакции имеют вид:
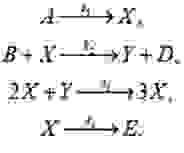
Предполагается, что реагенты A и B имеются в избытке, так что их концентрации можно считать постоянными, а D и E ни в какие реакции не вступают. Составим кинетические уравнения, соответствующие реакции, которые описывают динамику концентраций реагирующих веществ.
Поскольку число актов химической реакции в единицу времени определяется вероятностью столкновения молекул реагентов, скорости изменения концентраций продуктов реакции пропорциональны произведению концентраций соответствующих реагентов с коэффициентами пропорциональности, называемыми константами скоростей реакций. Тогда кинетические уравнения можно записать в виде:
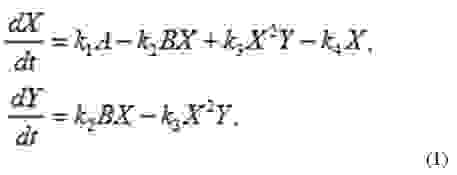
Символами Y,X будем теперь обозначать соответствующие концентрации. Отметим, что из третьего уравнения системы следует, что скорость образования вещества X зависит от его концентрации, т.е. эта стадия реакции носит автокаталитический характер. Приведем уравнения (1) к безразмерному виду, содержащему минимальное число управляющих параметров. Для этого перейдём к новым переменным,  Тогда уравнения (1) примут вид:
Тогда уравнения (1) примут вид:

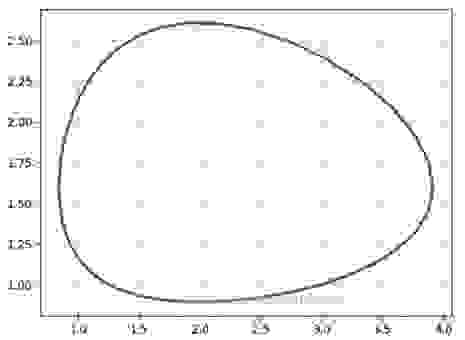
Построим фазовые портреты для: a=1.0; b=2.1; b=3.0;b=5.0
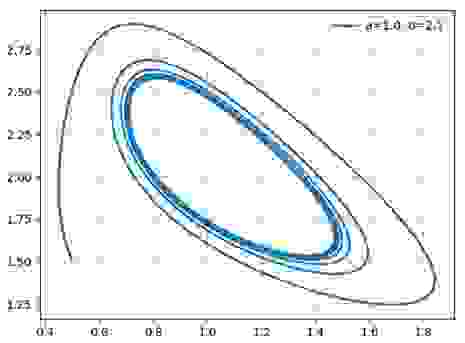
Таким образом, химический осциллятор демонстрирует поведение, типичное для автоколебательных систем и вполне аналогичное, например, осциллятору Ван-дер-Поля.
Автоколебания в биосистемах (на примере модели Лотки Вольтерра –“Хищник -жертва”)
В динамике популяций есть много примеров, когда изменение численности популяций во времени носит колебательный характер. Одним из самых известных примеров описания динамики взаимодействующих популяций являются уравнения Вольтерра—Лотка.
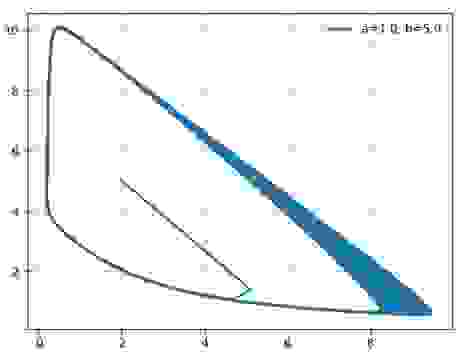
Рассмотрим модель взаимодействия хищников и их добычи, когда между особями одного вида нет соперничества. Пусть x и y— число жертв и хищников соответственно. Предположим, что относительный прирост жертв y’/x равен a-by, a>0, b>0, где a — скорость размножения жертв в отсутствие хищников, -by— потери от хищников.
Развитие популяции хищников зависит от количества пищи (жертв), при отсутствии пищи ( x=0 ) относительная скорость изменения популяции хищников равна y’/y =-c, c>0, наличие пищи компенсирует убывание, и при x>0 имеем y’/y =(-c +d*x), d>0.
Таким образом, система Вольтерра—Лотка имеет вид:
Рассмотрим фазовый портрет системы Вольтерра Лотка, для a=4 b=2.5, c=2, d=1 и графики ее решения с начальным условием x(0)=3, y(0)=1, построенные программой Python для численного решения системы обыкновенных дифференциальных уравнений:
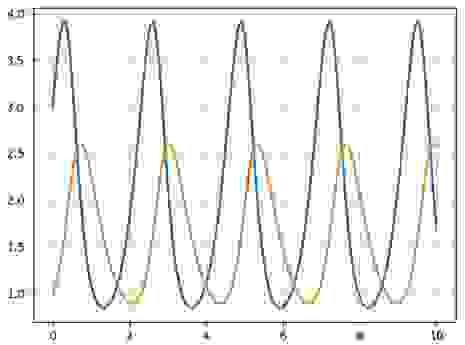
Видно, что процесс имеет колебательный характер. При заданном начальном соотношении числа особей обоих видов 3: 1, обе популяции сначала растут. Когда число хищников достигает величины b=2.5, популяция жертв не успевает восстанавливаться и число жертв начинает убывать.
Уменьшение количества пищи через некоторое время начинает сказываться на популяции хищников и когда число жертв достигает величины x=c/d =2 (в этой точке y’=0), число хищников тоже начинает сокращаться вместе с сокращением числа жертв. Сокращение популяций происходит до тех пор, пока число хищников не достигнет величины y=a/b =1.6 (в этой точке x’=0).
С этого момента начинает расти популяция жертв, через некоторое время пищи становится достаточно, чтобы обеспечить прирост хищников, обе популяции растут, и… процесс повторяется снова и снова.
Рассмотренная модель может описывать поведение конкурирующих фирм, рост народонаселения, численность воюющих армий, изменение экологической обстановки, развитие науки и т.п.
http://mathemlib.ru/mathenc/item/f00/s00/e0000637/index.shtml
http://habr.com/ru/post/342654/