Метод координат в пространстве
Для того, чтобы использовать метод координат, надо хорошо знать формулы. Их три:
Главная формула — косинус угла φ между векторами a = (x1; y1; z1) и b = (x2; y2; z2):

На первый взгляд, выглядит угрожающе, но достаточно немного практики — и все будет работать великолепно.
Задача. Найти косинус угла между векторами a = (4; 3; 0) и b = (0; 12; 5).
Решение. Поскольку координаты векторов нам даны, подставляем их в первую формулу:

Задача. Составить уравнение плоскости, проходящей через точки M = (2; 0; 1), N = (0; 1; 1) и K = (2; 1; 0), если известно, что она не проходит через начало координат.
Решение. Общее уравнение плоскости: Ax + By + Cz + D = 0, но, поскольку искомая плоскость не проходит через начало координат — точку (0; 0; 0) — то положим D = 1. Поскольку эта плоскость проходит через точки M, N и K, то координаты этих точек должны обращать уравнение в верное числовое равенство.
Подставим вместо x, y и z координаты точки M = (2; 0; 1). Имеем:
A · 2 + B · 0 + C · 1 + 1 = 0 ⇒ 2A + C + 1 = 0;
Аналогично, для точек N = (0; 1; 1) и K = (2; 1; 0) получим уравнения:
A · 0 + B · 1 + C · 1 + 1 = 0 ⇒ B + C + 1 = 0;
A · 2 + B · 1 + C · 0 + 1 = 0 ⇒ 2A + B + 1 = 0;
Итак, у нас есть три уравнения и три неизвестных. Составим и решим систему уравнений:
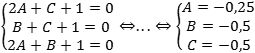
Получили, что уравнение плоскости имеет вид: − 0,25x − 0,5y − 0,5z + 1 = 0.
Задача. Плоскость задана уравнением 7x − 2y + 4z + 1 = 0. Найти координаты вектора, перпендикулярного данной плоскости.
Решение. Используя третью формулу, получаем n = (7; − 2; 4) — вот и все!
Вычисление координат векторов
А что, если в задаче нет векторов — есть только точки, лежащие на прямых, и требуется вычислить угол между этими прямыми? Все просто: зная координаты точек — начала и конца вектора — можно вычислить координаты самого вектора.
Чтобы найти координаты вектора, надо из координат его конца вычесть координаты начала.
Эта теорема одинаково работает и на плоскости, и в пространстве. Выражение «вычесть координаты» означает, что из координаты x одной точки вычитается координата x другой, затем то же самое надо сделать с координатами y и z. Вот несколько примеров:
Задача. В пространстве расположены три точки, заданные своими координатами: A = (1; 6; 3), B = (3; − 1; 7) и C = (− 4; 3; − 2). Найти координаты векторов AB, AC и BC.
Рассмотрим вектор AB: его начало находится в точке A, а конец — в точке B. Следовательно, чтобы найти его координаты, надо из координат точки B вычесть координаты точки A:
AB = (3 − 1; − 1 − 6; 7 − 3) = (2; − 7; 4).
Аналогично, начало вектора AC — все та же точка A, зато конец — точка C. Поэтому имеем:
AC = (− 4 − 1; 3 − 6; − 2 − 3) = (− 5; − 3; − 5).
Наконец, чтобы найти координаты вектора BC, надо из координат точки C вычесть координаты точки B:
BC = (− 4 − 3; 3 − (− 1); − 2 − 7) = (− 7; 4; − 9).
Ответ: AB = (2; − 7; 4); AC = (− 5; − 3; − 5); BC = (− 7; 4; − 9)
Обратите внимание на вычисление координат последнего вектора BC: очень многие ошибаются, когда работают с отрицательными числами. Это касается переменной y: у точки B координата y = − 1, а у точки C y = 3. Получаем именно 3 − (− 1) = 4, а не 3 − 1, как многие считают. Не допускайте таких глупых ошибок!
Вычисление направляющих векторов для прямых
Если вы внимательно прочитаете задачу C2, то с удивлением обнаружите, что никаких векторов там нет. Там только прямые да плоскости.
Для начала разберемся с прямыми. Здесь все просто: на любой прямой найдутся хотя бы две различные точки и, наоборот, любые две различные точки задают единственную прямую.
Кто-нибудь понял, что написано в предыдущем абзаце? Я и сам не понял, поэтому объясню проще: в задаче C2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим так называемый для прямой:
Зачем нужен этот вектор? Дело в том, что — это угол между их направляющими векторами. Таким образом, мы переходим от непонятных прямых к конкретным векторам, координаты которых легко считаются. Насколько легко? Взгляните на примеры:
Задача. В кубе ABCDA1B1C1D1 проведены прямые AC и BD1. Найдите координаты направляющих векторов этих прямых.
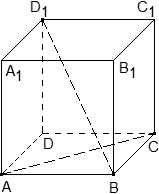
Поскольку длина ребер куба в условии не указана, положим AB = 1. Введем систему координат с началом в точке A и осями x, y, z, направленными вдоль прямых AB, AD и AA1 соответственно. Единичный отрезок равен AB = 1.
Теперь найдем координаты направляющего вектора для прямой AC. Нам потребуются две точки: A = (0; 0; 0) и C = (1; 1; 0). Отсюда получаем координаты вектора AC = (1 − 0; 1 − 0; 0 − 0) = (1; 1; 0) — это и есть направляющий вектор.
Теперь разберемся с прямой BD1. На ней также есть две точки: B = (1; 0; 0) и D1 = (0; 1; 1). Получаем направляющий вектор BD1 = (0 − 1; 1 − 0; 1 − 0) = (− 1; 1; 1).
Ответ: AC = (1; 1; 0); BD1 = (− 1; 1; 1)
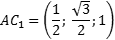
Задача. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, проведены прямые AB1 и AC1. Найдите координаты направляющих векторов этих прямых.
Введем систему координат: начало в точке A, ось x совпадает с AB, ось z совпадает с AA1, ось y образует с осью x плоскость OXY, которая совпадает с плоскостью ABC.
Для начала разберемся с прямой AB1. Тут все просто: у нас есть точки A = (0; 0; 0) и B1 = (1; 0; 1). Получаем направляющий вектор AB1 = (1 − 0; 0 − 0; 1 − 0) = (1; 0; 1).
Теперь найдем направляющий вектор для AC1. Все то же самое — единственное отличие в том, что у точки C1 иррациональные координаты. Итак, A = (0; 0; 0), поэтому имеем:

Небольшое, но очень важное замечание насчет последнего примера. Если начало вектора совпадает с началом координат, вычисления резко упрощаются: координаты вектора просто равны координатам конца. К сожалению, это верно лишь для векторов. Например, при работе с плоскостями присутствие на них начала координат только усложняет выкладки.
Вычисление нормальных векторов для плоскостей
Нормальные векторы — это не те векторы, у которых все в порядке, или которые чувствуют себя хорошо. По определению, нормальный вектор (нормаль) к плоскости — это вектор, перпендикулярный данной плоскости.
Другими словами, — это вектор, перпендикулярный любому вектору в данной плоскости. Наверняка вы встречали такое определение — правда, вместо векторов речь шла о прямых. Однако чуть выше было показано, что в задаче C2 можно оперировать любым удобным объектом — хоть прямой, хоть вектором.
Еще раз напомню, что всякая плоскость задается в пространстве уравнением Ax + By + Cz + D = 0, где A, B, C и D — некоторые коэффициенты. Не умаляя общности решения, можно полагать D = 1, если плоскость не проходит через начало координат, или D = 0, если все-таки проходит. В любом случае, координаты нормального вектора к этой плоскости равны n = (A; B; C).
Итак, плоскость тоже можно успешно заменить вектором — той самой нормалью. Всякая плоскость задается в пространстве тремя точками. Как найти уравнение плоскости (а следовательно — и нормали), мы уже обсуждали в самом начале статьи. Однако этот процесс у многих вызывает проблемы, поэтому приведу еще парочку примеров:
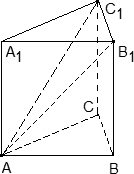
Задача. В кубе ABCDA1B1C1D1 проведено сечение A1BC1. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
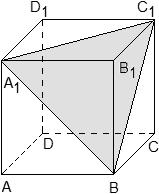
Поскольку плоскость не проходит через начало координат, ее уравнение выглядит так: Ax + By + Cz + 1 = 0, т.е. коэффициент D = 1. Поскольку эта плоскость проходит через точки A1, B и C1, то координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 + 1 = 0 ⇒ C + 1 = 0 ⇒ C = − 1;
Аналогично, для точек B = (1; 0; 0) и C1 = (1; 1; 1) получим уравнения:
A · 1 + B · 0 + C · 0 + 1 = 0 ⇒ A + 1 = 0 ⇒ A = − 1;
A · 1 + B · 1 + C · 1 + 1 = 0 ⇒ A + B + C + 1 = 0;
Но коэффициенты A = − 1 и C = − 1 нам уже известны, поэтому остается найти коэффициент B:
B = − 1 − A − C = − 1 + 1 + 1 = 1.
Получаем уравнение плоскости: − A + B − C + 1 = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; − 1).
Задача. В кубе ABCDA1B1C1D1 проведено сечение AA1C1C. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
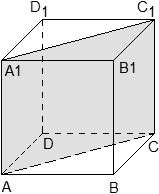
В данном случае плоскость проходит через начало координат, поэтому коэффициент D = 0, а уравнение плоскости выглядит так: Ax + By + Cz = 0. Поскольку плоскость проходит через точки A1 и C, координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 = 0 ⇒ C = 0;
Аналогично, для точки C = (1; 1; 0) получим уравнение:
A · 1 + B · 1 + C · 0 = 0 ⇒ A + B = 0 ⇒ A = − B;
Положим B = 1. Тогда A = − B = − 1, и уравнение всей плоскости имеет вид: − A + B = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; 0).
Вообще говоря, в приведенных задачах надо составлять систему уравнений и решать ее. Получится три уравнения и три переменных, но во втором случае одна из них будет свободной, т.е. принимать произвольные значения. Именно поэтому мы вправе положить B = 1 — без ущерба для общности решения и правильности ответа.
Координаты середины отрезка
Очень часто в задаче C2 требуется работать с точками, которые делят отрезок пополам. Координаты таких точек легко считаются, если известны координаты концов отрезка.
Итак, пусть отрезок задан своими концами — точками A = (xa; ya; za) и B = (xb; yb; zb). Тогда координаты середины отрезка — обозначим ее точкой H — можно найти по формуле:

Другими словами, координаты середины отрезка — это среднее арифметическое координат его концов.
Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Точка K — середина ребра A1B1. Найдите координаты этой точки.
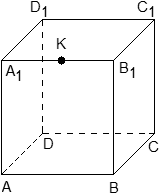
Поскольку точка K — середина отрезка A1B1, ее координаты равных среднему арифметическому координат концов. Запишем координаты концов: A1 = (0; 0; 1) и B1 = (1; 0; 1). Теперь найдем координаты точки K:

Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Найдите координаты точки L, в которой пересекаются диагонали квадрата A1B1C1D1.
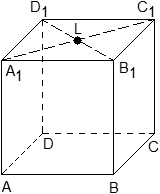
Из курса планиметрии известно, что точка пересечения диагоналей квадрата равноудалена от всех его вершин. В частности, A1L = C1L, т.е. точка L — это середина отрезка A1C1. Но A1 = (0; 0; 1), C1 = (1; 1; 1), поэтому имеем:
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.

Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:

Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.

Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора.
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма

Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и .
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:

Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и . Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и :

2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.

Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму:
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.

Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и , а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.

Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
То есть A + C + D = 0.
Аналогично для точки K:
Получили систему из трех уравнений:
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
Выразим C и B через A и подставим в третье уравнение:
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.

Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.

Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 🙂
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать «параллелепипед».

Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор .
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей), — нормаль к плоскости α.

Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат

Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD = . Высота параллелепипеда AA1 = . Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:

Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
Система координат в пространстве — определение с примерами решения
Содержание:
Система координат в пространстве
Декартова система координат в пространстве
Вы познакомились с декартовой системой координат на плоскости в предыдущих классах. Систему координат в пространстве введём аналогично тому, как это было сделано на плоскости. Рассмотрим три взаимно перпендикулярных оси Ох, Оу и Оz, пересекающихся в точке О, являющейся началом координат. Через каждую пару этих прямых проведём плоскости Оху, 0xz и Оуz (рис. 1). Таким образом вводится система координат в пространстве, при этом
точку О — называют началом координат, прямые Ох, Оу и Оz — осями координат, Ох — ось абсцисс, Оу — ось ординат и Оz — ось аппликат, плоскости Оху, Оуz и Охz — координатными плоскостями.
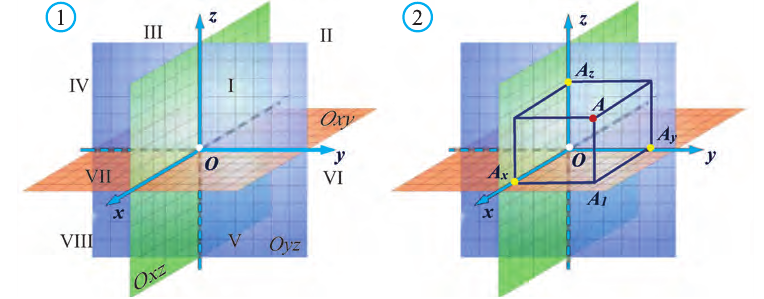
Координатные плоскости делят пространство на 8 октант (получетвертей) (рис. 1).
Пусть в пространстве задана произвольная точка А. Через эту точку проведём плоскости, перпендикулярные плоскостям Охz, Оуz и Охz (рис. 2). Одна из этих плоскостей пересечёт ось Ох в точке Ах.
Координату Ах на оси Ох называют координатой х или абсциссой точки А.
Аналогично определяют у — координату (ординату) и z- координату (аппликату) точки А.
Координаты точки А записывают в виде А (х; у; z) или короче (х; у; z). Точки, изображённые на рисунке 3, имеют следующие координаты: А (0; 5; 0), B (4; 0; 0), М (0; 5; 4), К (2; 3; 4), Р (-2; 3; -4). 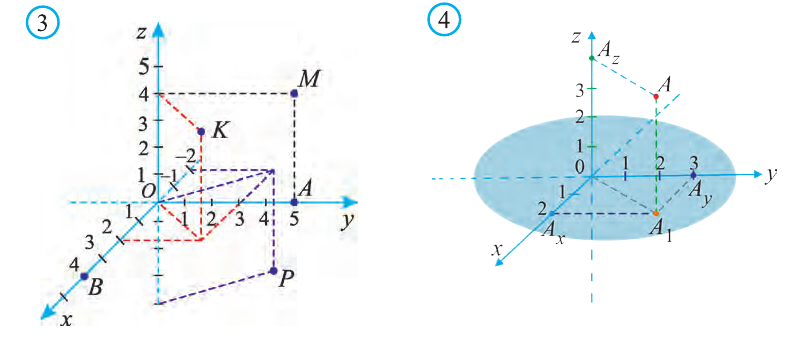
Пример:
Пусть в пространстве в декартовой системе координат
задана точка А (2; 3; 4). Где она расположена?
Решение:
От начала координат в положительном направлении осей Ох и Оу отложим отрезки ОАх = 2 и ОАу = 3 (рис. 4).
Через точку Ах проведём прямую, лежащую в плоскости Оху и параллельную оси Оу. А через точку Аy проведём прямую, лежащую в плоскости Оху и параллельную оси Ох. Точку пересечения этих прямых обозначим A1 . Через точку A1 проведём прямую, перпендикулярную плоскости Оху и на ней в положительном направлении Oz отложим отрезок АА1 = 4. Тогда точка А (2; 3; 4) и будет искомой точкой. 
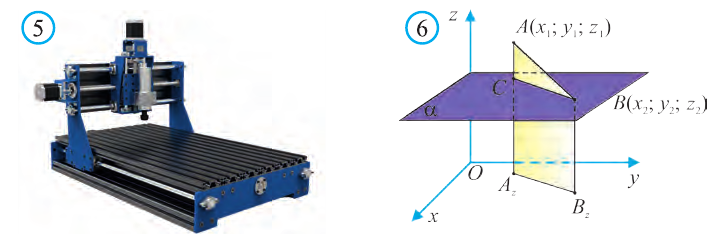
Пользуясь системой координат, созданной для современных программируемых станков и автоматизированных роботов, составляются программы, на основе которых обрабатываются металлы (рис. 5).
Расстояние между двумя точками
1.Сначала рассмотрим случай, когда прямая АВ не параллельна оси Оz (рис. 6). Через точки А и В проведём прямые, параллельные оси Оz. И пусть они пересекают плоскость Оху в точках Аz и Вz .
Координаты х и у этих точек соответственно равны координатам х и у точек А, В, а координаты z равны 0.
Теперь через точку В проведём плоскость а, параллельную плоскости Оху. Она пересечёт прямую ААz в некоторой точке С.
По теореме Пифагора: АВ 2 = АС 2 + СВ 2 .
Однако 
Поэтому 
2.Пусть отрезок АВ параллелен оси Оz, тогда  и, так как
и, так как
Следовательно, расстояние между двумя точками А и В:
(1)
Примечание. Формула (1) выражает длину диагонали прямоугольного параллелепипеда, измерения которого равны 
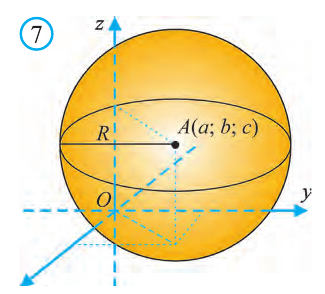
Уравнение сферы и шара
Известно, что множество всех точек М (х; у; z), расположенных на расстоянии R от данной точки А (а; Ь; с) образуют сферу (рис. 7). Тогда по формуле (1) координаты всех точек, расположенных на сфере радиуса R с центром в точке А (а; b; с), удовлетворяют равенству 
Отсюда, ясно, что неравенство для точек шара радиуса R с центром в
точке А (а; b; с) имеет вид: 
Пример:
Найдите периметр треугольника ABC с вершинами в
Решение:
Р=АВ+АС+ВС периметр треугольника ABC. Воспользовавшись формулой  расстояния между двумя точками, найдём длины сторон треугольника:
расстояния между двумя точками, найдём длины сторон треугольника:
Следовательно, треугольник ABC равносторонний и его периметр  .
.
Ответ: 
Координаты середины отрезка
Пусть А (x1; y1;z1) и В (х2; у2; z2) — произвольные точки, точка С (х; у; z) середина отрезка AB (рис. 8). 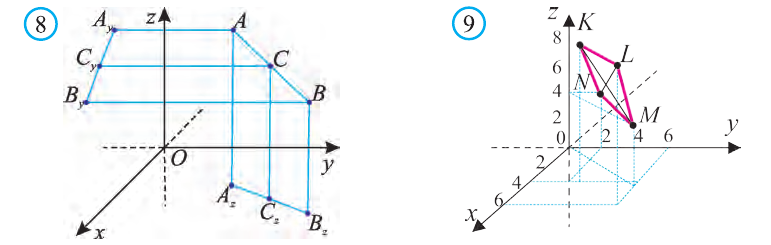
Через точки А, В и С проведём прямые, параллельные оси пересекающие плоскость Оху в точках  и
и 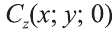 . Тогда по теореме Фалеса точка Сz — середина отрезка АzВz.
. Тогда по теореме Фалеса точка Сz — середина отрезка АzВz.
Отсюда по формулам нахождения координат середины отрезка на плоскости 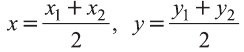
Чтобы найти координату z, нужно вместо плоскости Оху рассмотреть плоскость 0xz или Оуz.
Тогда и для z получим формулу, подобную вышеприведённой.

Аналогично, используя координаты концов A и B отрезка AB, по формулам 
находят координаты точки Р(х1;у]; г,), делящей отрезок АВ в отношении X САР: РВ = X).
Доказательство: Для решения задачи используем признак параллелограмма: Четырёхугольник, точка пересечения диагоналей которого делит их пополам, является параллелограммом.
Координаты середины отрезка МК:

Координаты середины отрезка NL:

Координаты середин отрезков МК и NL равны. Это говорит о том, что отрезки пeрeсeкаются и в точке пeрeсeчeния делятся пополам. Следовательно, четырёхугольник MNLK — параллелограмм.
В переписке с известным целителем и математиком Абу Али ибн Сино Абу Райхон Беруни задаёт следующий вопрос: «Почему Аристотель и другие (философы) называют шесть сторон?»
Рассматривая шестисторонний куб, Беруни говорит о фигурах «с другим количеством сторон» и добавляет, что «шарообразные фигуры не имеют сторон.» А Ибн Сино отвечает, что «во всех случаях нужно считать, что сторон шесть, так как у каждой фигуры, независимо от её формы, есть три измерения — длина, глубина и ширина».
Здесь Ибн Сино имеет ввиду три координаты, именуемые условно «шесть сторон».
В произведении «Канон Масъуда» Беруни приводит точное математическое определение шести сторон: «Сторон шесть, так как они ограничивают движение фигур по своим измерениям. Измерений три: длина, ширина и глубина. А их в два раза больше самих измерений.»
В предыдущих книгах автор определяет положение небесных тел с помощью двух координат относительно небесной сферы — эклиптического уравнения. Либо через те же координаты, но относительно небесного экватора или горизонта. Однако при определении взаимного расположения звёзд и небесных светил придётся учитывать и случаи затмений. Вот в таких случаях появляется необходимость в третьей сферической координате. Эта необходимость привела Беруни к отказу от теории небесных координат.
Векторы в пространстве и действия над ними
Векторы в пространстве
Понятие вектора в пространстве вводят также как на плоскости.
Вектором в пространстве называют направленный отрезок. Основные понятия, относящиеся к векторам в пространстве, аналогичны этим понятиям на плоскости: длина (модуль), направление вектора, равенство векторов.
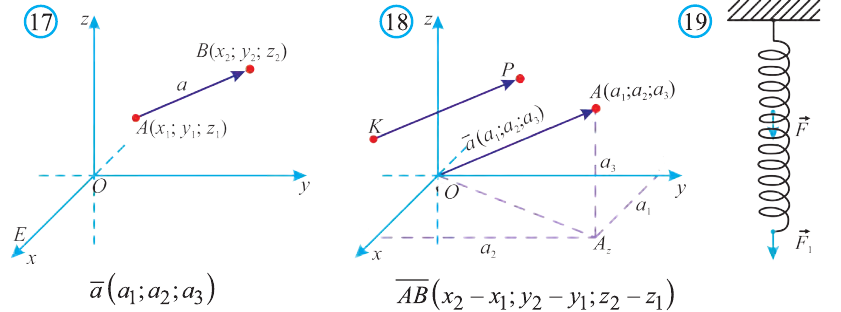
Координатами вектора с началом в точке А (х1; у1; z1) и концом в точке В (х1; у1; z1) называют числа  , (рис. 17).
, (рис. 17).
Приведем без доказательства свойства векторов, аналогичных свойствам на плоскости.
Также как на плоскости, соответствующие координаты равных векторов равны и, обратно, векторы с равными координатами равны.
Hа основании этого вектор можно обозначить как  или
или  или кратко
или кратко  (рис. 18).
(рис. 18).
Вектор можно записать и без координат  (или
(или  ). В этой записи
). В этой записи
на первом месте начало вектора, а на втором — конец.
Вектор с координатами, равными нулю, называют нулевым вектором и обозначают  или
или  , направление этого вектора не определено.
, направление этого вектора не определено.
Если начало вектора расположено в начале координат О, а числа а1,
координатами вектора  :
:  (а1; а2; а3).
(а1; а2; а3).
Однако вектор в пространстве  с началом в точке К(с1; с2; с3) и концом в точке
с началом в точке К(с1; с2; с3) и концом в точке  будет иметь те же координаты:
будет иметь те же координаты:  .
.
Отсюда следует, что вектор можно приложить к любой точке пространства. В геометрии мы рассматриваем такие свободные векторы. Но в физике, обычно вектор связан с некоторой точкой. Например, воздействие силы приложенная к пружине F на рисунке 19 зависит от точки её приложения.
Длинной вектора называют длину направленного отрезка
изображающего его (рис. 17). Длину вектора  записывают
записывают
так . Длина вектора
. Длина вектора  , заданного координатами,
, заданного координатами,
вычисляется по формуле  .
.
Пример:
Даны точки А (2; 7;-3),В (1; 0; 3), С (-3;-4; 5) и D (-2; 3; -1). Какие из векторов  и
и  равны между собой?
равны между собой?
Решение:
У равных векторов равны соответствующие координаты. Поэтому найдём координаты векторов:

Следовательно,  .
.
Докажите самостоятельно, что 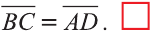
Действия над векторами в пространстве
Действия над векторами. Сложение векторов, умножение на число и их скалярное произведение определяется также как на плоскости.
Суммой векторов и  (b1; b2; b3); называют вектор
(b1; b2; b3); называют вектор  (рис. 20).
(рис. 20).
Пусть кран на рисунке 20.b движется вдоль вектора , а груз относительно крана вдоль вектора  . В результате груз движется вдоль вектора
. В результате груз движется вдоль вектора  . Поэтому из рисунка 20.с, на котором изображён сюжeт басни русского писателя И.А.Крылова, ясно, что герои басни не смогут сдвинуть телегу с места.
. Поэтому из рисунка 20.с, на котором изображён сюжeт басни русского писателя И.А.Крылова, ясно, что герои басни не смогут сдвинуть телегу с места.
Свойства суммы векторов
Для любых векторов  ,
,  и
и  имеют место следующие свойства:
имеют место следующие свойства:
a)  — переместительный закон сложения векторов;
— переместительный закон сложения векторов;
b)  — распределительный закон сложения.
— распределительный закон сложения.
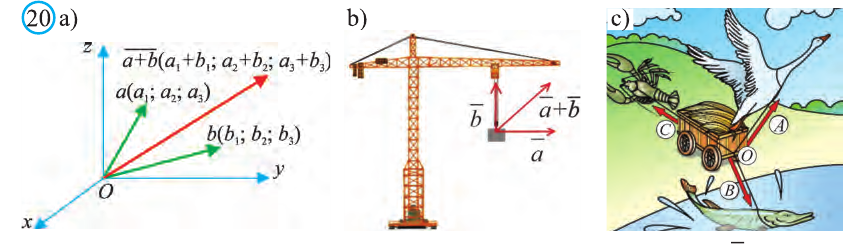
Правило треугольника сложения векторов
Для любых точек А, В и С (рис. 21): 
Правило параллелограмма сложения векторов
Если АВСD — параллелограмм (рис. 22), то 
Правило многоугольника сложения векторов
Если точки А, В, С, D и Е — вершины многоугольника (рис. 23), то
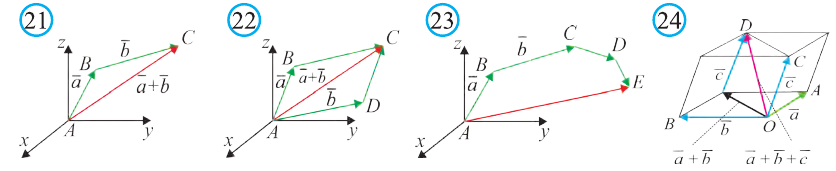
Правило параллелепипеда сложения трёх векторов, не лежащих в одной плоскости. Если АВСDА1В1С1D1 параллелепипед (рис. 24), то
 .
.
Вектор 
 = (a1; a2; a3) — называют умножением вектора
= (a1; a2; a3) — называют умножением вектора
(a1; a2; a3) на число  (рис. 25). Свойства операции умножения вектора на число.
(рис. 25). Свойства операции умножения вектора на число.
Для любых векторов и и чисел  и
и 
а) ;
;
b) ;
;
c)  и направление вектора
и направление вектора
совпадает с направлением вектора , если  ,
,
противоположно направлению вектора , если  .
. 
Коллинеарные и компланарные векторы
Пусть заданы ненулевые векторы и  . Если векторы
. Если векторы
и сонаправлены или противоположно направлены,
то их называют коллинеарными векторами (рис. 26).
Свойство 1. Если для векторов и имеет место равенство  , то они коллинеарны и наоборот.
, то они коллинеарны и наоборот.
Если  , то векторы и сонаправлены
, то векторы и сонаправлены  , если
, если , то
, то
противоположно направлены  .
.
Свойство 2. Если векторы (a1; a2; a3) и (b1; b2; b3) коллинеарны,
то их соответствующие координаты пропорциональны:
 и наоборот.
и наоборот.
Пример:
Найдите вектор с началом в точке А (1; 1; 1) и концом в точке В, лежащей в плоскости Оху, коллинеарный вектору ( 1; 2; 3).
Решение:
Пусть точка В имеет координаты В (х; у; z). Так как точка В лежит в плоскости Оху, то z=0. Тогда  (х — 1 ;у — 1; — 1).
(х — 1 ;у — 1; — 1).
По условию задачи векторы (х — 1 ;у — 1; — 1) и (1, 2, 3) коллинеарны. Следовательно, их координаты пропорциональны.
Тогда получаем следующие пропорции  .
.
Откуда находим  ,
,  .
.
Итак,
Векторы, лежащие в одной плоскости или параллельных плоскостях, называют компланарными векторами (рис. 27). 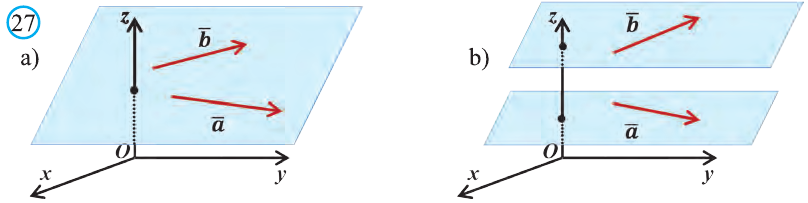
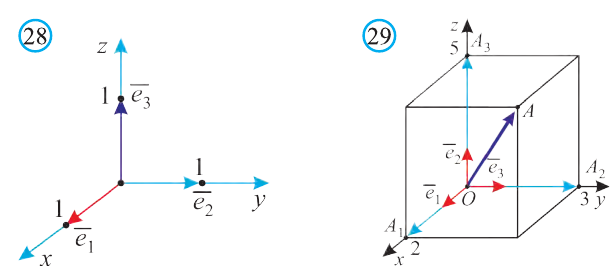
Векторы  (1; 0; 0),
(1; 0; 0),  (0; 1; 0) и
(0; 1; 0) и  (0; 0; 1) называют ортами (рис. 28).
(0; 0; 1) называют ортами (рис. 28).
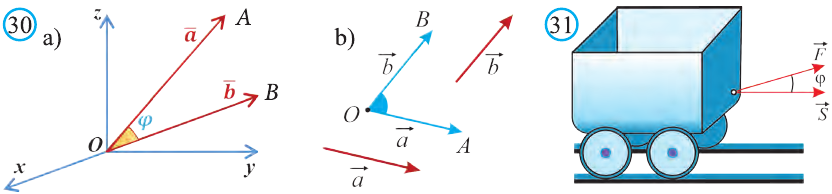
Любой вектор  можно единственным образом разложить по ортам, то есть представить в виде
можно единственным образом разложить по ортам, то есть представить в виде  (рис. 29).
(рис. 29).
Точно также, если заданы три нeкомпланарных вектора  и
и  , то любой вектор
, то любой вектор  можно единственным образом представить в виде:
можно единственным образом представить в виде:
 .
.
Здесь  некоторые действительные числа. Тогда говорят, что вектор разложен по заданным векторам.
некоторые действительные числа. Тогда говорят, что вектор разложен по заданным векторам.
Скалярное произведение векторов
Углом между ненулевыми векторами и называют угол между направленными отрезками векторов  = и
= и  =, исходящих из точки О (рис. 30).
=, исходящих из точки О (рис. 30).
Угол между векторами и обозначают так  .
.
Скалярным произведением векторов и называют произведение длин этих векторов на косинус угла между ними.
Если один из векторов нулевой, то скалярное произведение этих векторов равно нулю.
Скалярное произведение обозначают  или
или  . По определению
. По определению  (1)
(1)
Из определения следует, что если скалярное произведение векторов и равно нулю, то эти векторы перпендикулярны и наоборот.
В физике работа A, выполненная при движении тела на расстоянии  , под воздействием силы
, под воздействием силы  (рис. 31), равна скалярному произведению силы
(рис. 31), равна скалярному произведению силы  на расстояние
на расстояние :
: 
Свойство. Если и (b1; b2; b3), то ( ) =
) = 
Доказательство. Приложим векторы и к началу
координат О (рис.32). Тогда = 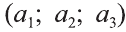 и
и  = (b1; b2; b3).
= (b1; b2; b3).
Если векторы неколлинеарны, то получаем треугольник АВО , для которого справедлива теорема косинусов.

Тогда  .
.
Однако, 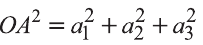 ,
,
и  .
.
Следовательно,

 .
.
Самостоятельно докажите, что и в случае, когда данные векторы коллинеарны  , также выполняется
, также выполняется
это равенство. 
Свойства скалярного произведения векторов
1.  — переместительное свойство.
— переместительное свойство.
2.  — распределительное свойство.
— распределительное свойство.
3.  — сочетательное свойство.
— сочетательное свойство.
4.Если векторы а и b являются сонаправленными коллинеарными
векторами, то  , так как соs 0° = 1.
, так как соs 0° = 1.
5.Если же векторы противоположно направлены, то  , так как cos l80° = -1.
, так как cos l80° = -1.
6.  .
.
7. Если вектор перпендикулярен вектору , то  . Следствия: а) Длина вектора
. Следствия: а) Длина вектора  ; (1) b) косинус угла между векторами
; (1) b) косинус угла между векторами
 :
:  ; (2)
; (2)
с) условие перпендикулярности векторов  и
и
 .
.
 (3)
(3)
Пример:
 — заданные точки. Найдите косинус угла между векторами
— заданные точки. Найдите косинус угла между векторами  .
.
Решение:
Найдём длины векторов  :
:
 ,
,
 .
.
 ,
,
 .
.

Пример:
Найдите угол между векторами  .
.
Решение:
 Итак,
Итак, 
Пример:
Найдите  , если
, если  ,
,  и угол между векторами
и угол между векторами и
и  равен
равен  .
.
Решение:


Пример:
Найдите координаты и длины векторов 1) ; 2)
; 2) , если
, если  .
.
Решение:
Подставим в выражения искомых векторов разложения векторов и по координатам:
1)
 . Следовательно,
. Следовательно, .
.
Тогда .
.
2)

 .
.
Следовательно, 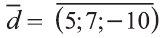 .
.
Тогда 
Пример:
Найдите произведение , если угол между векторами и равен 30° и
, если угол между векторами и равен 30° и  ,
,  .
.
Решение:
Сначала найдём поизведение векторов и :
 .
.
Затем перемножим заданные выражения как многочлены
и, пользуясь распределительным свойством умножения
вектора на число, получим:

 .
.
Учитывая, что  ,
,
 найдём искомое произведение
найдём искомое произведение

Преобразование и подобие в пространстве
Геометрические преобразования в пространстве
Если каждую точку заданной в пространстве фигуры F изменить одним и тем же способом, то получим фигуру F1. Если при этом преобразовании различные точки первой фигуры переходят в различные точки второй, то говорят о преобразовании геометрической фигуры.
Если рассматривать все пространства как геометрическую фигуру, то также можно говорить о преобразовании геометрической фигуры.
Понятие геометрического преобразование в пространстве вводят также как на плоскости. Следовательно, свойства некоторых рассматриваeмых ниже видов преобразований и их доказательства также подобны соответствующим им на плоскости. Поэтому, мы не будем доказывать их и рекомендуем провести их самостоятельно.
Движение и параллельный перенос
Преобразование фигур, при котором сохраняются расстояния между точками, называют движением. Можно привести следующие свойства движения. При движении прямая переходит в прямую, луч — в луч, отрезок — в равный ему отрезок, угол — в равный ему угол, треугольник — в равный ему треугольник, плоскость — в плоскость, тетраэдр — в равный ему тетраэдр.
В пространстве фигуры, которые можно перевести одну в другую при некотором движении называют равными фигурами.
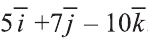
Простейшим примером движения является параллельный перенос.
Пусть в пространстве даны вектор  и произвольная точка Х
и произвольная точка Х
(рис. 44). Говорят, что точка Х перешла в точку X1 параллельным
переносом на вектор , если выполняется условие  . Если каждую точку фигуры F сдвинуть на вектор при помощи параллельного переноса (рис. 45), то получим фигуру F1. Тогда говорят, что фигура F получена параллельным переносом фигуры F1 . При параллельном переносе каждая точка фигуры F сдвигается в одном и том же направлении на одно и то же расстояние.
. Если каждую точку фигуры F сдвинуть на вектор при помощи параллельного переноса (рис. 45), то получим фигуру F1. Тогда говорят, что фигура F получена параллельным переносом фигуры F1 . При параллельном переносе каждая точка фигуры F сдвигается в одном и том же направлении на одно и то же расстояние.
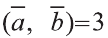
Каждая точка подъёмного крана, изображённого на рисунке 46, параллельно перенесена на 40 м относительно начального положения.
Ясно, что параллельный перенос является движением. Поэтому прямая переходит в прямую, луч — в луч, плоскость — в плоскость,
Пусть точка  фигуры F перешла в точку
фигуры F перешла в точку 
фигуры F1 при помощи параллельного переноса
на вектор  .
.
Тогда по определению получим:
 или
или
 .
.
Эти равенства называют формулами параллельного переноса.
Пример:
В какую точку перейдёт точка Р (-2; 4; 6) при параллельном переносе на вектор  = (3; 2; 5)?
= (3; 2; 5)?
Решение:
По вышеприведённым формулам параллельного переноса:  .
.
Ответ:  .
.
Центральная симметрия в пространстве
Если в пространстве  , то есть точка О — середина отрезка АА1 то точки А и А1 называют симметричными относительно точки О.
, то есть точка О — середина отрезка АА1 то точки А и А1 называют симметричными относительно точки О.
Если в пространстве каждая точка фигуры F переходит в точку, симметричную относительно точки О (рис. 47), то такое преобразование называют симметрией относительно точки О. На рисунках 48, 49 изображёны фигуры симметричные относительно точки О. Симметрия относительно точки является движением.
Если при симметрии относительно точки О фигура F переходит в себя, то её называют центрально симметричной фигурой.
Например, диагонали параллелепипеда (рис. 50) относительно их точки пересечения О являются центрально симметричными фигурами.
Пример:
В какую точку перейдет точка A = (1; 2; 3) при симметрии относительно точки О (2; 4; 6)?
Решение:
Пусть А1 = (х; у; z) — искомая точка. По определению точка
О — середина отрезка АА1. Следовательно,

Из этих уравнений получаем:
 .
.
Ответ: 
Симметрия относительно плоскости
Точки А и А1 называют симметричными относительно плоскости а,
если плоскость перпендикулярна отрезку и делит его пополам (рис. 51). Фигуры F1, и F2 на рисунке 52 симметричны относительно
плоскости а. Очевидно, что наш силуэт и его отражение симметричны относительно плоскости зеркала (рис. 53).
Симметрия относительно плоскости а является движением. 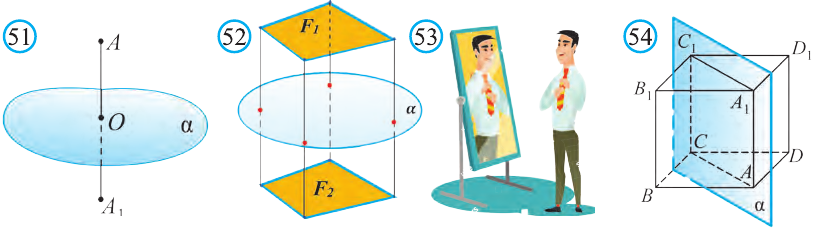
Поэтому при симметрии относительно плоскости а отрезок переходит в равный ему отрезок, прямая — в прямую, плоскость — в плоскость.
Если при симмeтрии относительно плоскости фигура F переходит в себя, то её называют фигурой симметричной относительно плоскости.
Например, изображённый на рисунке 54 куб, есть фигура, симметричная относительно плоскости а, проходящей через его диагонали АА1 и СС1.
Поворот и симметрия относительно оси
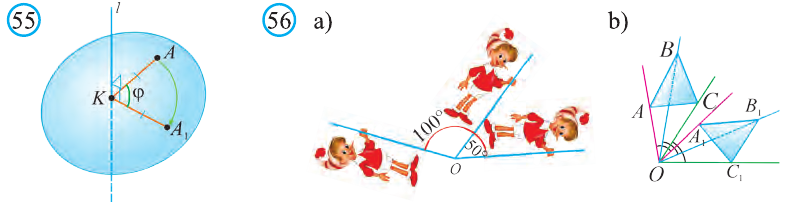
Пусть в пространстве заданы точки А и А1 и прямая l. Если перпендикуляры АК и А1К, опущенные на прямую l, равны и образуют угол  , то говорят, что точка А перешла в точку А1 в результате поворота на угол относительно прямой l (рис. 55).
, то говорят, что точка А перешла в точку А1 в результате поворота на угол относительно прямой l (рис. 55).
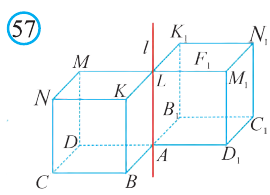
Если каждую точку фигуры F повернуть на угол относительно прямой l, то получим новую фигуру F1 . Тогда говорят, что фигура F перешла в фигуру F1 с помощью поворота на угол относительно прямой l. На рисунке 56 мы видим фигуры, полученные таким поворотом. Например, повернув куб, изображённый на рисунке 57, на 180° относительно прямой l, получим новый куб.
Поворот относительно прямой также является движением.
Поворот на 180° относительно прямой l называют симметрией относительно прямой l.
Центр, ось и плоскость симметрии называют элементами симметрии. Точки, симметричные точке А (х; у; z) относительно координатных плоскостей, координатных осей и начала координат, будут иметь следующие координаты:

Симметрия в природе и технике
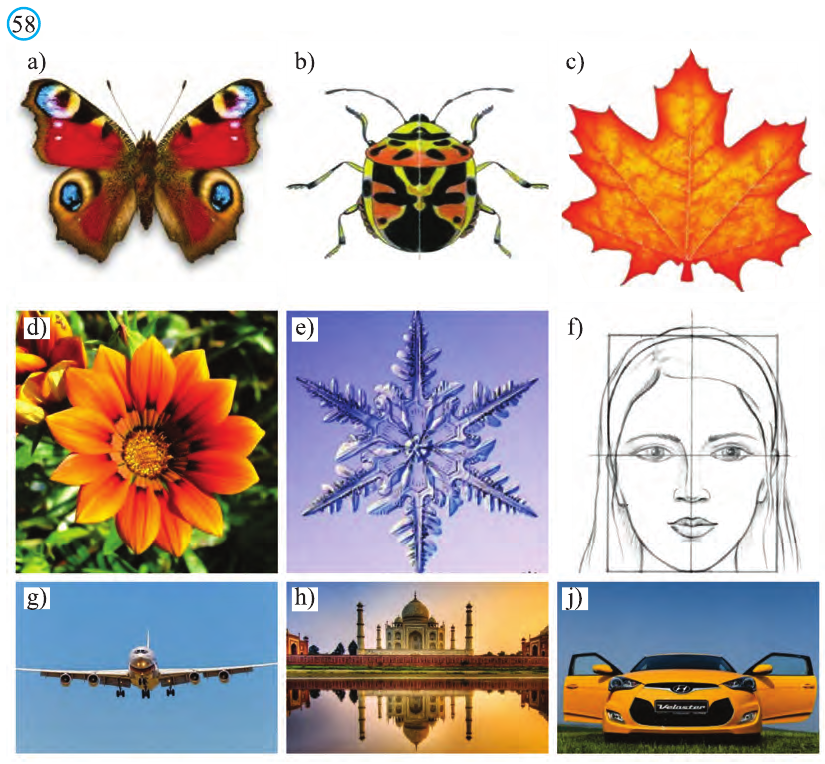
В природе на каждом шагу можно встретить симметрию.
Например, множество живых существ, в частности тела человека и животных, листья растений и цветы устроены симметрично (рис. 58). Также в неживой природе есть элементы, например, снежинки, кристаллы соли. Молекулярное строение веществ тоже состоит из симметричных фигур. Это, конечно, неспроста, поскольку симметричные фигуры не только красивы, но и самые устойчивые.
Раз так, то можно считать, что красота и совершенство природы построены на основе симметрии. Взяв за основу природную красоту и совершенство, строители, инженеры и архитекторы создают строения и механизмы, здания и сооружения, технику и транспортные средства симметричными. В этой работе им очень помогает наука геометрия.
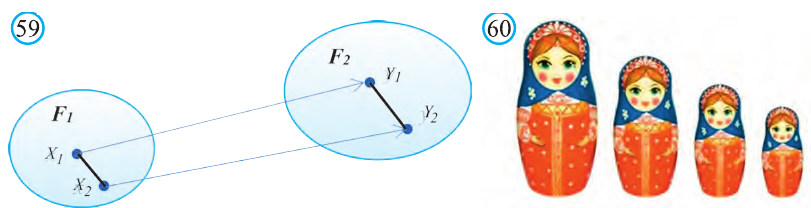
Подобие пространственных фигур
Пусть  и преобразование переводят фигуру F1, в фигуру F2. Если
и преобразование переводят фигуру F1, в фигуру F2. Если
при этом преобразовании для произвольных точек X1 и Х2 фигуры F1 и соответствующих им точек Y1 и Y2 фигуры  , то это преобразование называют преобразованием подобия (рис. 59).
, то это преобразование называют преобразованием подобия (рис. 59).
Как видим, понятие преобразования подобия в пространстве вводится также как на плоскости. Следовательно, рассматриваемые ниже виды подобия, их свойства и доказательства этих свойств подобны соответствующим на плоскости. Поэтому, мы не будем останавливаться на их доказательствах и рекомендуем провести их самостоятельно. Преобразование подобия в пространстве отображает прямую в прямую, луч в луч, отрезок в отрезок и угол в угол. Точно также это преобразование плоскость отображает в плоскость.
Если в пространстве одна из фигур перешла в другую с помощью преобразования подобия, то эти фигуры называют подобными.
Пусть в пространстве задана фигура F, точка О и число к  . Преобразование, переводящее произвольную точку X фигуры F в точку Х1 удовлетворяющую условию
. Преобразование, переводящее произвольную точку X фигуры F в точку Х1 удовлетворяющую условию 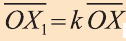 , называют гомотетией относительно центра О с коэффициентом
, называют гомотетией относительно центра О с коэффициентом  (рис. 61). Точку О называют центром гомотетии, а число коэффициентом гомотетии. Если в результате такого преобразования каждой точки фигуры F получена фигура F1 то говорят, что фигура F гомотетична фигуре F1.
(рис. 61). Точку О называют центром гомотетии, а число коэффициентом гомотетии. Если в результате такого преобразования каждой точки фигуры F получена фигура F1 то говорят, что фигура F гомотетична фигуре F1.
Вы видите, что определение гомотетии в пространстве аналогично соответствующему определению на плоскости. Следовательно, все свойства и их доказательства аналогичны. Поэтому, мы не будем доказывать их и рекомендуем провести их самостоятельно.
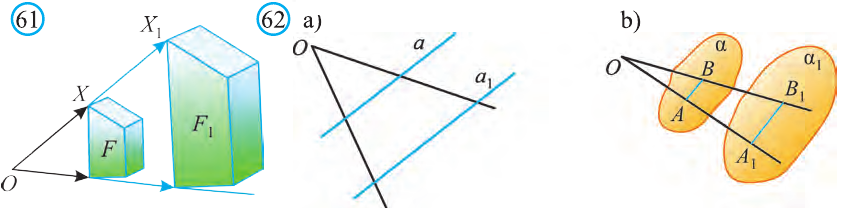
Гомотетия относительно точки О с коэффициентом является преобразованием подобия. Гомотетия с отличным от нуля коэффициентом при = 1 отображает фигуру F в себя, а при =-1 в фигуру F1 симметричную фигуре F относительно точки О. В остальных случаях гомотетии не сохраняет расстояния между точками, т. е. не является движением. В результате гомотетии расстояние между точками увеличивается в одно и тоже число раз, т. е. меняются измерения фигуры, но сохраняется её форма. При гомотетии а) прямая отображается в параллельную ей прямую (рис. 62.а); b) плоскость — в параллельную ей плоскость (рис. 62.b), если они не проходят через центр гомотетии.
Если же прямая или плоскость проходят через центр гомотетии, то они отображаются в себя.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Иррациональные числа
- Действительные числа
- Решение уравнений высших степеней
- Системы неравенств
- Уравнения и неравенства
- Уравнения и неравенства содержащие знак модуля
- Уравнение
- Метод математической индукции
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://ege-study.ru/ru/ege/materialy/matematika/vektory-v-prostranstve-i-metod-koordinat/
http://www.evkova.org/sistema-koordinat-v-prostranstve