Кинематика вращательного движения
Вы будете перенаправлены на Автор24
Если все точки тела совершают движения по окружностям, при этом все центры данных окружностей находятся на одной прямой, тогда такое движение тела (системы) называют вращением. При этом ось, на которой находятся центры окружностей, получила название оси вращения:
- ее положение может быть внутри тела (системы) или вне его;
- она может двигаться или быть неподвижной;
- плоскости траекторий движения точек тела перпендикулярны оси вращения;
- в трехмерном пространстве каждое вращение обладает осью вращения (теорема Эйлера).
Угловая скорость
Допустим, что некоторое твердое тело совершает вращения вокруг неподвижной оси. В таком движении точки данного тела описывают окружности. Центы этих окружностей принадлежат оси вращения, радиусы их различны.
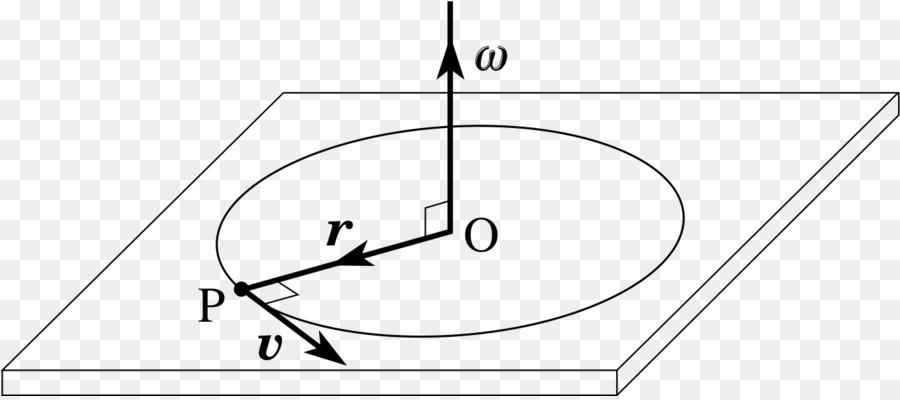
Рассмотрим одну точку нашего тела. Пусть она перемещается по окружности, радиус которой равен $R$ (рис.1).
Рисунок 1. Угловая скорость. Автор24 — интернет-биржа студенческих работ
Положение, рассматриваемой точки будем задавать при помощи угла поворота $\Delta \varphi$.
Элементарно малые углы поворота можно рассматривать как векторы. При этом величина вектора $d\vec \varphi$ равна величине угла поворота $\Delta \varphi$ (рис.1).
Направление $d\vec \varphi$ подчинено правилу правого буравчика, то есть направлено вдоль направления поступательного перемещения острия винта, при вращении его головки, совпадающем с направлением вращения точки по ее окружности.
$d\vec \varphi$ называют аксиальным вектором (псевдовектором). Псевдо векторы не имеют точки приложения, их изображают в любой точке на оси вращения.
Готовые работы на аналогичную тему
$\vec \omega$ — угловая скорость.
Вектор $\omega$ направлен по оси вращения (правило правого винта), и совпадает по направлению с элементарным углом поворота $d\vec \varphi$ (рис.1).
Единица $\omega$ — это радиан, деленный на секунду (рад/с).
Линейную скорость нашей материальной точки можно связать с угловой скоростью, эту связь легко установить, рассматривая рис.1.
Мы получили, линейная скорость по величине равна:
В виде вектора линейная скорость материальной точки, определяется так:
$\vec v = \vec \omega \times \vec R (3),$
где $R$ — радиус окружности.
Из формулы (3) следует, что величина линейной скорости равна:
$v=\omega \times R sin (\alpha )(4),$
где $\alpha$ — угол между векторами $\vec \omega$ и $\vec R$.
Направление результата векторного произведения в (4) определяет правило правого винта. Головку винта вращают от $\vec \omega$ к $\vec R$, поступательное перемещение острия указывает направление $\vec v$.
При постоянной угловой скорости вращение называют равномерным.
Период вращения
Для характеристики равномерного вращения вводят такую физическую величину, как период вращения $T$.
Периодом вращения называют время, равное времени полного оборота точки на угол в $360^0 C$:
Величину, обратную периоду вращения называют частотой ($\nu$):
$\omega = 2\pi \nu (7).$
Угловое ускорение
Угловым ускорением называют вектор, равный:
или второй производной от угла поворота:
При движении по окружности вектор $\omega$ изменяется только по величине, не изменяя своего направления. В этом случае полное ускорение материальной точки можно найти, применяя выражение (3) и (8) как:
$\vec \varepsilon= \frac
Если тело совершает вращения около неподвижной оси, то $\vec \varepsilon$ имеет направление вдоль оси вращения тела.
Если угловая скорость вращения тела увеличивается (вращение ускоренное), то вектор углового ускорения и вектор угловой скорости сонаправлены.
При замедленном вращении векторы углового ускорения и угловой скорости имеют противоположные направления.
Тангенциальная и нормальная компоненты линейного ускорения
По определению, составляющая линейного ускорения ($a_<\tau>$), которая отвечает за изменение величины скорости движения тела (тангенциальное ускорение) равна:
Принимая во внимание выражение (2), мы получим:
Ускорение, отвечающее за изменение направления скорости движения при криволинейном перемещении – это нормальное (или центростремительное ускорение) ($a_n$) равно:
Использовав формулу (2), имеем:
Мы получили связи между линейными параметрами движения:
- длиной пути ($s$) пройденным, материальной точкой по дуге окружности радиуса $R$;
- линейной скоростью перемещения точки $v$;
- тангенциальным ускорением $a_<\tau>$;
- нормальным ускорением $a_n$
и угловыми величинами:
- углом поворота $\varphi$;
- угловой скоростью $\omega$;
- угловым ускорением $varepsilon$.
$s=R\Delta \varphi$, $v=R\omega$, $a_<\tau>=R\varepsilon$, $a_n=\omega^2R.$
Вращение с постоянным угловым ускорением
Если вращение материальной точки происходит с постоянным угловым ускорением ($\varepsilon = const$,), то его называют равнопеременным.
В таком случае это движение можно описывать при помощи следующих уравнений. Для угловой скорости имеют место равенства:
$\omega = \omega _0+\varepsilon t (13) $
при вращении с положительным ускорением (равноускоренное движение) и
$\omega = \omega _0-\varepsilon t (14) $
при равнозамедленном вращении. В формулах (13) и (14) $\omega_0$ — начальная скорость вращения.
Угол поворота материальной точки при равноускоренном движении задает формула:
$\varphi= \varphi_0 + \omega _0 t +\frac<\varepsilon t^2> <2>(15)$
при равноускоренном движении
$\varphi= \varphi_0 + \omega _0 t — \frac<\varepsilon t^2> <2>(16)$
при равнозамедленном движении. В уравнениях (15) и (16) $\varphi_0 $ — начальный угол поворота.
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 08 05 2021
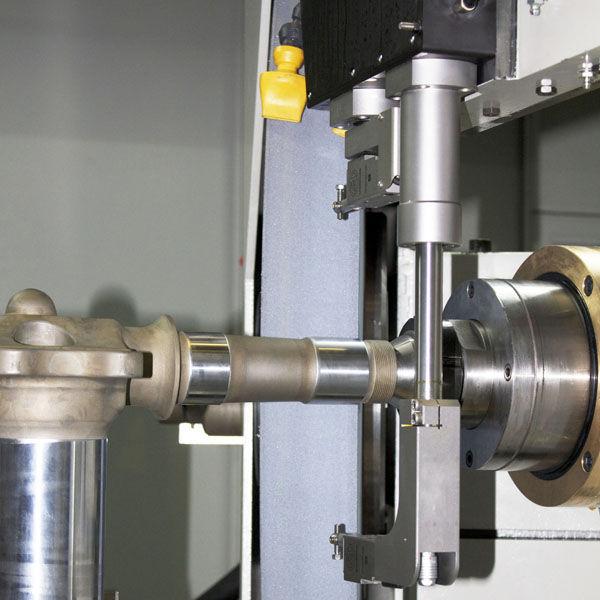
Вращательное движение твердого тела: уравнение, формулы
В природе и технике мы часто сталкиваемся с проявлением вращательного движения твердых тел, например, валов и шестерен. Как в физике описывают этот тип движения, какие формулы и уравнения для этого применяются, эти и другие вопросы освещаются в данной статье.
Что такое вращение?
Каждый из нас интуитивно представляет, о каком движении пойдет речь. Вращение — это процесс, при котором тело или материальная точка движется по круговой траектории вокруг некоторой оси. С геометрической точки зрения ось вращения твердого тела — это прямая, расстояние до которой в процессе перемещения остается неизменным. Это расстояние называют радиусом вращения. Далее будем обозначать его буквой r. Если ось вращения проходит через центр масс тела, то ее называют собственной осью. Примером вращения вокруг собственной оси является соответствующее движение планет Солнечной системы.
 Вам будет интересно: Афронт — это ситуация, в которой не хочется оказаться
Вам будет интересно: Афронт — это ситуация, в которой не хочется оказаться

Чтобы вращение происходило, должно существовать центростремительное ускорение, которое возникает за счет центростремительной силы. Эта сила направлена от центра масс тела к оси вращения. Природа центростремительной силы может быть самой разной. Так, в космическом масштабе ее роль выполняет гравитация, если тело закреплено нитью, то сила натяжения последней будет центростремительной. Когда тело вращается вокруг собственной оси, роль центростремительной силы играет внутреннее электрохимическое взаимодействие между составляющими тело элементами (молекулами, атомами).
 Вам будет интересно: Декабрист Оболенский Евгений Петрович: биография. Декабристские организации
Вам будет интересно: Декабрист Оболенский Евгений Петрович: биография. Декабристские организации
Необходимо понимать, что без присутствия центростремительной силы тело будет двигаться прямолинейно.
Описывающие вращение физические величины
Во-первых, это динамические характеристики. К ним относятся:
- момент импульса L;
- момент инерции I;
- момент силы M.
Во-вторых, это кинематические характеристики. Перечислим их:
- угол поворота θ;
- скорость угловая ω;
- ускорение угловое α.
Кратко опишем каждую из названных величин.
Момент импульса определяется по формуле:
Где p — линейный импульс, m — масса материальной точки, v — ее линейная скорость.
Момент инерции материальной точки рассчитывается с помощью выражения:
Для любого тела сложной формы величина I рассчитывается, как интегральная сумма моментов инерции материальных точек.
Момент силы M вычисляется так:
Здесь F — внешняя сила, d — расстояние от точки ее приложения до оси вращения.
Физический смысл всех величин, в названии которых присутствует слово «момент», аналогично смыслу соответствующих линейных величин. Например, момент силы показывает возможность приложенной силы сообщить угловое ускорение системе вращающихся тел.
Кинематические характеристики математически определяются следующими формулами:
Как видно из этих выражений, угловые характеристики аналогичны по своему смыслу линейным (скорости v и ускорению a), только они применимы для круговой траектории.
Динамика вращения
В физике изучение вращательного движения твердого тела осуществляется с помощью двух разделов механики: динамики и кинематики. Начнем с динамики.
Динамика изучает внешние силы, действующие на систему вращающихся тел. Сразу запишем уравнение вращательного движения твердого тела, а затем, разберем его составные части. Итак, это уравнение имеет вид:
Момент силы, который действует на систему, обладающую моментом инерции I, вызывает появление углового ускорения α. Чем меньше величина I, тем легче с помощью определенного момента M раскрутить систему до больших скоростей за малые промежутки времени. Например, металлический стержень легче вращать вдоль его оси, чем перпендикулярно ей. Однако, тот же стержень легче вращать вокруг оси, перпендикулярной ему, и проходящей через центр масс, чем через его конец.
Закон сохранения величины L
Выше была введена эта величина, она называется моментом импульса. Уравнение вращательного движения твердого тела, представленное в предыдущем пункте, часто записывают в иной форме:
Если момент внешних сил M действует на систему в течение времени dt, то он вызывает изменение момента импульса системы на величину dL. Соответственно, если момент сил равен нулю, тогда L = const. Это и есть закон сохранения величины L. Для нее, используя связь между линейной и угловой скоростью, можно записать:
L = m*v*r = m*ω*r2 = I*ω.
Таким образом, при отсутствии момента сил произведение угловой скорости и момента инерции является постоянной величиной. Этот физический закон используют фигуристы в своих выступлениях или искусственные спутники, которые необходимо повернуть вокруг собственной оси в открытом космосе.

Центростремительное ускорение
Выше, при изучении вращательного движения твердого тела, уже была описана эта величина. Также была отмечена природа центростремительных сил. Здесь лишь дополним эту информацию и приведем соответствующие формулы для расчета этого ускорения. Обозначим его ac.
Поскольку центростремительная сила направлена перпендикулярно оси и проходит через нее, то момента она не создает. То есть эта сила не оказывает совершенно никакого влияния на кинематические характеристики вращения. Тем не менее, она создает центростремительное ускорение. Приведем две формулы для его определения:
Таким образом, чем больше угловая скорость и радиус, тем большую силу следует приложить, чтобы удержать тело на круговой траектории. Ярким примером этого физического процесса является занос автомобиля во время поворота. Занос возникает, если центростремительная сила, роль которой играет сила трения, становится меньше, чем центробежная сила (инерционная характеристика).

Кинематика вращения
Три основные кинематические характеристики были перечислены выше в статье. Кинематика вращательного движения твердого тела формулами следующими описывается:
θ = ω*t => ω = const., α = 0;
θ = ω0*t + α*t2/2 => ω = ω0 + α*t, α = const.
В первой строке приведены формулы для равномерного вращения, которое предполагает отсутствие внешнего момента сил, действующего на систему. Во второй строке записаны формулы для равноускоренного движения по окружности.
Отметим, что вращение может происходить не только с положительным ускорением, но и с отрицательным. В этом случае в формулах второй строки следует перед вторым слагаемым поставить знак минус.
Пример решения задачи
На металлический вал в течение 10 секунд действовал момент силы 1000 Н*м. Зная, что момент инерции вала равен 50 кг*м2, необходимо определить угловую скорость, которую придал валу упомянутый момент силы.
Применяя основное уравнение вращения, вычислим ускорение вала:
Поскольку это угловое ускорение действовало на вал в течение времени t = 10 секунд, то для вычисления угловой скорости применяем формулу равноускоренного движения:
Здесь ω0 = 0 (вал не вращался до действия момента сил M).
Подставляем в равенство численные значения величин, получаем:
ω = 1000/50*10 = 200 рад/с.
Чтобы это число перевести в привычные обороты в секунду, необходимо его поделить на 2*pi. Выполнив это действие, получаем, что вал будет вращаться с частотой 31,8 об./с.
Вращательное движение твердого тела — характеристика, формулы и уравнения
Вращательное движение твердого тела – движение, при котором все точки объекта описывают траекторию в виде окружности.
Распространенный случай в физике – вокруг покоящейся оси (рис. 1).
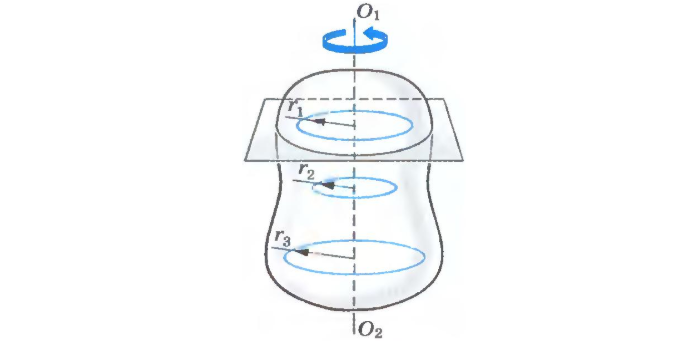
Рис. 1 Вращение твердого тела вокруг оси
Линия, соединяющая неподвижные точки, читается осью вращения. Кинематика перемещения в целом аналогична поступательной. Только путь измеряется не в метрах, а в радианах или градусах.
Последние связаны между собой следующей формулой:
ϕ – угол в радианах (рад);
γ – угол в градусах (°).
Закон и уравнение вращательного движения твердого тела
Законы движения также схожи. Для равноускоренного движения:

ϕ0 – начальный угол (рад);
ω0 – начальная угловая скорость (рад/с);
ε – угловое ускорение (рад/с 2 ).
Под положительным понимают перемещение против часовой стрелки.
Угловая скорость
В обычной жизни вращение оценивается в оборотах за единицу времени. За минуту чаще всего. Для расчетов такие характеристики неудобны. Поэтому определяется так:

Скорость в оборотах ν легко связать с угловой:

ν – скорость в оборотах (1/с).
Используется еще одна важная величина – период вращения T. За это время предмет совершает полный поворот:

Угловое ускорение
В уравнении движения был показан частный случай равноускоренного перемещения. Но это не всегда так. Также ε может принимать отрицательные значения в случае замедления.
Линейные величины
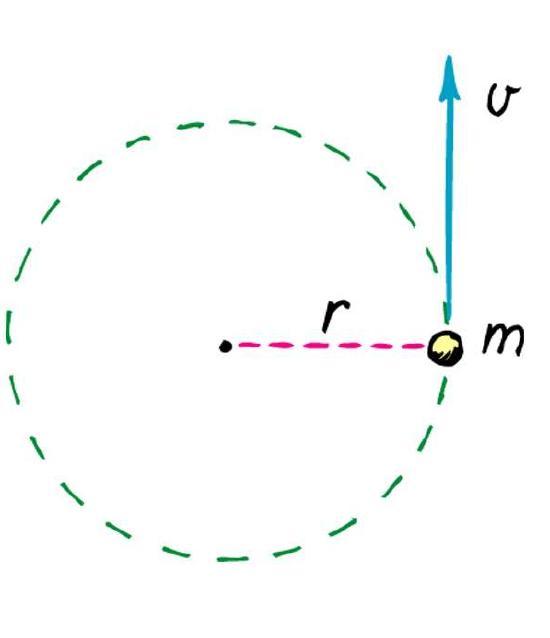
При малых величинах пройденный путь (см. рис. 2) будет равен:

где r – расстояние до центра вращения (м).
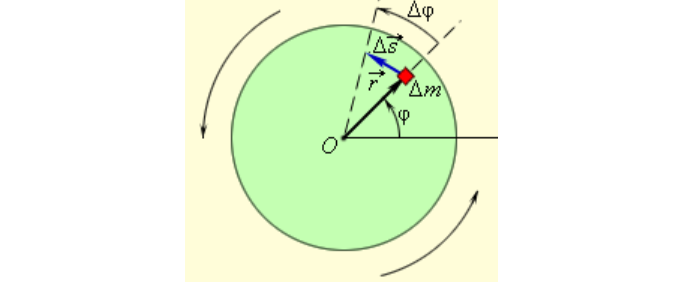
Рис. 2 Перемещение
Откуда следует линейная скорость:
Вектор, перпендикулярный отрезку, r. То есть расположенный на касательной к окружности вращения.
И, соответственно, ускорение:
Кроме того, передвижение по кривой линии невозможно без центростремительного ускорения:
Возвратно-вращательное движение
Общий случай раскачивания маятника. Анализ подобных противоположных телодвижений пары объектов порождает некоторые парадоксы.
Возникают странные и дико звучащие названия вроде «безопорного движителя». Выводы в конечном итоге противоречат законам механики Ньютона.
Приверженцы таких рассуждений существуют и доводы имеют право на жизнь. Не все общепринятые взгляды безупречны. Евклидова геометрия тому пример. Теория довольно запутана, и здесь мы ее рассматривать не будем.
С учетом масс
Представив себе, что тело состоит из незначительных масс mi, получим любопытные результаты. Кинетическая энергия выразится так:
Джоуль (Дж) – единица энергии и работы в системе СИ.
Моментом инерции относительно выбранной оси называется:
или в соответствующей интегральной форме.
Тогда энергия выразится следующим образом:
То есть имеется некий аналог массы. Но последняя является неизменной присущей объекту величиной. Момент же инерции зависит от местонахождения оси.
В реальных условиях распространен случай вращения вокруг оси, включающей центр масс. Найдем его для системы, указанной на рис. 3.
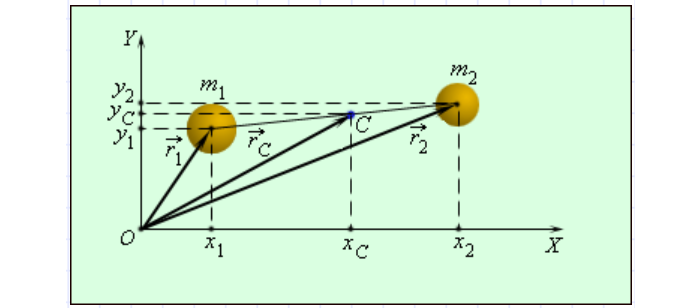
Рис. 3 Определение центра масс.
Определится по формулам:
Вектор, направленный из начала координат в центр масс, в общем случае выразится следующим образом:
Можно перевести в интегральную форму. В присутствии гравитации – заодно и центр тяжести.
Можно сказать, что общее движение предмета включает поступательное и вращательное. Пример – качение чего-то округлого (рис. 4). При этом все перемещение точек можно исчерпывающе изобразить на рисунке. В таком варианте движение называется плоским.
Полная кинетическая энергия равна:
m – масса объекта;
IC – момент инерции относительно оси, включающей центр масс.
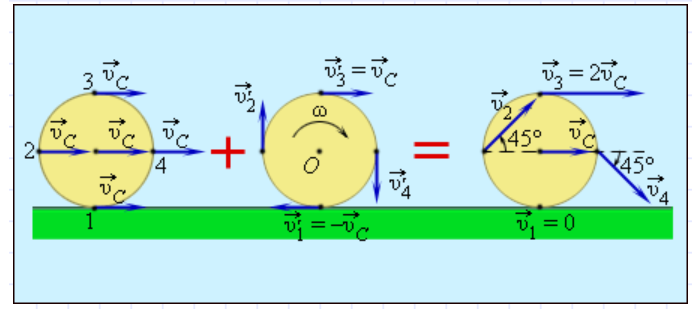
Рис. 4 Качение колеса
Частные случаи вращательного движения
1. Равномерное (рис. 5), с постоянной скоростью, с нулевым ускорением.
Выражается уравнением: φ = φ0 + ωt

2. Равноускоренное. Рассмотрено ранее. Но все же уместны некоторые пояснения (рис. 6).

3. Вокруг неподвижной оси. Наиболее распространенный в рассмотрении вариант. Как для реальных нужд, так и в теории.
4. Возвратно-вращательное. В математическом выражении напоминает колебания. При подробном рассмотрении вызывает неудобные вопросы.
Заключение
Для разработчиков оборудования тема отнюдь не праздная. Рассматриваются задачи по передаче силового момента (в частности в ременных механизмах). Разбирается механика работы подшипников, гироскопов.
В артиллерии снаряды стабилизируются вращением. Да и расчеты их на прочность связаны со сложным напряженным состоянием в связи с раскручиванием в стволе.
Орбиты планет имеют отношение к рассматриваемой кинематике.
На самом деле все сферы использования данной темы невозможно перечислить, это действительно нужный раздел.
http://1ku.ru/obrazovanie/46117-vrashhatelnoe-dvizhenie-tverdogo-tela-uravnenie-formuly/
http://nauka.club/fizika/vrashchatelnoe-dvizhenie-tverdogo-tela.html