Условия равновесия системы сил в теоретической механике
Содержание:
Условия равновесия системы сил:
Условия равновесия системы сил в векторной форме
Из теоремы о приведении системы сил к силе и паре сил можно вывести условия равновесия системы сил, действующих на твердое тело. Очевидно, что если система сил находится в равновесии, то в равновесии находится и эквивалентная ей система, состоящая из силы и пары сил. Чтобы такая система сил была эквивалентна _ нулю, необходимо и достаточно равенства нулю как силы 
Условия (11) являются векторными условиями равновесия для любой системы сил.
Условия равновесия пространственной системы сил в аналитической форме
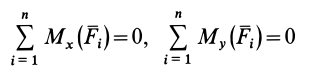
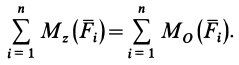
Если при равновесии системы сил, приложенных к твердому телу, главный вектор равен нулю, то его проекция на каждую координатную ось также равна нулю. Это справедливо и для главного момента  . Таким образом, из векторных условий равновесия пространственной системы сил следует шесть условий:
. Таким образом, из векторных условий равновесия пространственной системы сил следует шесть условий:

Учитывая формулы (5) и (7), эти шесть условий через силы системы выражают в форме
Таким образом, для равновесия пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы три суммы проекций всех сил на оси декартовых координат были равны нулю и три суммы моментов всех сил относительно трех осей координат также были равны нулю.
Из общих условий равновесия для произвольной пространственной системы сил получаются условия равновесия для частных систем сил, приложенных к твердому телу.
Условия равновесия пространственной системы параллельных сил
Направим ось  параллельно силам
параллельно силам  (рис. 37). Тогда проекции параллельных сил на перпендикулярные им оси
(рис. 37). Тогда проекции параллельных сил на перпендикулярные им оси  и
и  будут равны нулю и условия
будут равны нулю и условия
окажутся справедливыми для всех систем параллельных сил, т. е. превратятся в тождества. Момент относительно оси каждой из параллельных сил равен нулю, и условие  тоже выполняется для всех систем параллельных сил. Отбрасывая
тоже выполняется для всех систем параллельных сил. Отбрасывая
условия равновесия, которые выполняются тождественно при выбранном направлении оси , и учитывая, что сумма проекций сил на эту ось является алгебраической суммой сил, из (13) получаем следующие три условия равновесия пространственной системы параллельных сил:
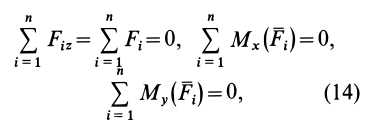
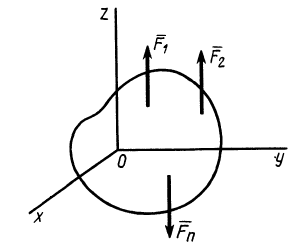
Рис. 37
т. е. для равновесия пространственной системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма этих сил была равна нулю и суммы моментов сил относительно двух координатных осей, перпендикулярных силам, также были равны нулю.
Условия равновесия плоской системы сил
Расположим оси  и в плоскости действия сил (рис. 38). Так как ось
и в плоскости действия сил (рис. 38). Так как ось  перпендикулярна силам, то
перпендикулярна силам, то 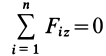 выполняется для всех плоских систем сил, т. е. является тождеством. Каждая из сил расположена в одной плоскости с осями координат и , и поэтому ее моменты относительно этих осей равны нулю. Таким образом, условия равновесия
выполняется для всех плоских систем сил, т. е. является тождеством. Каждая из сил расположена в одной плоскости с осями координат и , и поэтому ее моменты относительно этих осей равны нулю. Таким образом, условия равновесия
становятся тождествами. Моменты сил относительно оси , перпендикулярной силам, равны алгебраическим моментам этих сил относительно точки  . Таким образом,
. Таким образом,
Из (13) для плоской системы сил после отбрасывания тождеств имеем следующие три условия равновесия:

т. е. для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равна нулю.
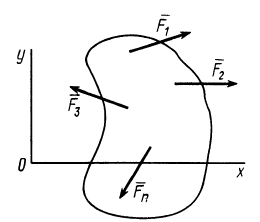
Рис. 38
Для плоской системы параллельных сил (рис. 39) одну из осей координат, например , можно выбрать параллельной силам. Тогда сумма проекций параллельных сил на эту ось превратится в алгебраическую сумму сил. Проекция каждой из сил на ось равна нулю; следовательно, сумма проекций сил на ось равна нулю, даже если система сил не находится в равновесии. Это условие выполняется тождественно, и его следует отбросить.
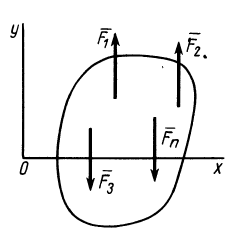
Рис. 39
Итак, для плоской системы параллельных сил из (15) имеем следующие условия равновесия:

т. е. для равновесия плоской системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма сил была равна нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости сил, также была равна нулю.
Из условий равновесия плоской системы сил (15) можно получить и условия равновесия плоской системы сходящихся сил, для чего за моментную точку надо взять точку пересечения линий действия сходящихся сил. Тогда последнее из условий станет тождеством и в качестве условий равновесия для плоской системы сходящихся сил останутся только два первых условия из (15).
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Плоская система сил
- Трение
- Пространственная система сил
- Центр тяжести
- Система сходящихся сил
- Моменты силы относительно точки и оси
- Теория пар сил
- Приведение системы сил к простейшей системе
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Равновесие тела под действием пространственной системы сил
Содержание:
Для равновесия твердого тела, находящегося под действием произвольной пространственной системы сил,необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно произвольного центра О были равны нулю.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Условия равновесия тела, находящегося под действием пространственной системы произвольных сил
Поскольку любую пространственную систему произвольных сил можно свести к одной силе — главного вектора  и одной пары — главного момента
и одной пары — главного момента  , приложенные к телу, то для равновесия тела необходимо и достаточно, чтобы главный вектор и главный момент одновременно равны нулю:
, приложенные к телу, то для равновесия тела необходимо и достаточно, чтобы главный вектор и главный момент одновременно равны нулю:

Причем, если = 0, то Rx = 0, Ry = 0 и Rz = 0, а если = 0, то Mx = 0, My = 0 и Mz = 0.
Проекции главного вектора на оси пространственной декартовой системы
координат равны

Проекции главного момента на эти же оси координат равны

Далее, с учетом уравнений, выражение можно окончательно представить в виде уравнений равновесия тела под действием пространственной системы произвольных сил:

На основании этих уравнений состоят конкретные уравнения равновесия тела.
Таким образом, для равновесия тела, находящегося под действием пространственной
системы произвольных сил, необходимо и достаточно, чтобы алгебраические суммы
проекций всех сил на оси пространственной декартовой системы координат и
алгебраические суммы моментов всех сел относительно этих осей равны нулю.
Условия равновесия тела, находящегося под действием пространственной системы параллельных сил

Если силы, приложенные к телу, расположенные в пространстве, но параллельны, то можно так выбрать систему координат, чтобы одна из осей (например, ось z) была параллельна данным силам (рис. 1.53). Тогда две другие оси (x, y) будут образовывать плоскость, которая будет перпендикулярной этим силам. Проекции заданных сил на оси x и y будут равны нулю. Как силы, параллельные оси, заданные силы не создают моментов относительно оси z.
Теперь, если принимать во внимание условия выше, то для пространственной системы параллельных сил три условия равновесия по данной системе выпадают, а остаются три другие. Итак, для равновесия пространственной системы параллельных сил имеем следующие уравнения равновесия:

Таким образом, для равновесия тела, находящегося под действием пространственной
системы параллельных сил, необходимо и достаточно, чтобы алгебраическая сумма
проекций всех сил на ось, которая параллельная силам, и алгебраические суммы
моментов относительно двух других осей равны нулю.
Теорема Вариньона о моменте равнодействующей силы относительно оси
Предположим, что есть тело, к которому приложена пространственная система
произвольных сил  .
.  ,
,  , .
, .  , что сведено к равнодействующей , которая приложена к телу в точке C (рис. 1.54). Приложим к точке C уравновешивающую
, что сведено к равнодействующей , которая приложена к телу в точке C (рис. 1.54). Приложим к точке C уравновешивающую
силу  , которая по модулю равна равнодействующей силе , расположенная с ней
, которая по модулю равна равнодействующей силе , расположенная с ней
на одной прямой, но имеет противоположное направление.
В этом случае тело, которое находится под действием системы сил . , , . и уравновешивающей силы , будет в состоянии равновесия, а это означает, что алгебраическая сумма моментов всех этих сил относительно любой оси декартовой системы координат должна равняться нулю. Возьмем сначала ось x и для нее запишем данное условие равновесия


Найдем из этого выражения момент силы относительно оси x. Он будет равняться

Поскольку модуль силы равен модулю силы , но они имеют противоположное направление, то = –. А это значит, что mx () = –mx (). Подставим значение этого момента, получим

Такие условия можно составить в отношении двух других осей.
Таким образом, если пространственная система произвольных сил сводится к
равнодействующей, то момент равнодействующей силы относительно произвольной оси равен алгебраической сумме моментов составляющих сил относительно этой же оси.
Пример равновесия тела под действием пространственной системы произвольных сил
Есть горизонтальный вал трансмиссии (рис. 1.55), который несет два шкивы C и D ременной передачи и может вращаться в подшипниках A и B. Радиусы шкивов равны rC = 0,2 м, rD = 0,25 м. Натяжения ветвей ремня на шкиве C — горизонтальные  и
и  , причем, = 2 = 4905 Н. Натяжения ветвей паса на шкиве D —
, причем, = 2 = 4905 Н. Натяжения ветвей паса на шкиве D —  и
и  , причем = 2 , с вертикалью они образуют угол α = 30º. Размеры вала равны: a = b = 0,5 м, с = 1 м.
, причем = 2 , с вертикалью они образуют угол α = 30º. Размеры вала равны: a = b = 0,5 м, с = 1 м.
Система находится в равновесии.
Определить натяжения и и реакции подшипников A и B.
Решение.
Рассмотрим равновесие вала AB со шкивами C и D. Освободим вал от связей, заменив их соответствующими реакциями. В подшипниках реакции расположены в плоскости, перпендикулярной оси вала AB. Таким образом, реакции подшипников A и B расположены соответственно в плоскости xAz и в плоскости, параллельной к ней и проходит через точку B. Неизвестный вектор каждой реакции подшипников в плоскости определяется двумя проекциями на оси x и z, как это показано на рис. 1.55. После сделанных
предположений, полученная пространственная система произвольных сил, находится в
состоянии равновесия.
Запишем на основании условий равновесия соответствующие уравнения равновесия пространственной системы произвольных сил.


Как видно из полученной системы уравнений равновесия, второе уравнение отсутствует, поскольку среди сил, приложенных к телу, нет таких, которые бы могли быть спроецированы на ось y (т. е. все силы лежат в плоскостях, перпендикулярных оси y). Однако, данная система является статически обозначенной, поскольку число неизвестных величин (t2, XA, ZA, XB, ZB) равно числу уравнений равновесия — 5.
Если подставить в данную систему уравнений числовые значения величин, заданные (учитывая, что по условию задачи = 2) и решить эти уравнения относительно неизвестных, получим следующие ответы:
Значения неизвестных величин XA и XB отрицательные, а это означает, что, фактически, эти реакции, которые показаны на рис. 1.55, имеют противоположное направление.
Для окончательного определения реакций подшипников в точках A и B необходимо добавить геометрически их составляющие. А именно

Услуги по теоретической механике:
Учебные лекции:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
iSopromat.ru

Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
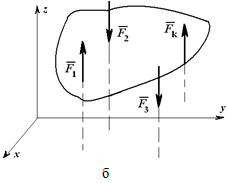
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
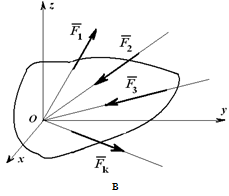
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
и два уравнения для плоской системы:
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
http://natalibrilenova.ru/ravnovesie-tela-pod-dejstviem-prostranstvennoj-sistemyi-sil/
http://isopromat.ru/teormeh/obzornyj-kurs/uravnenia-ravnovesia-sistemy-sil