Плоскопараллельное движение твердого тела.
1. Уравнения плоскопараллельного движения
Плоскопараллельным (или плоским) называется такое движение твердого тела, при котором все его точки перемешаются параллельно некоторой неподвижной плоскости П.

Рассмотрим сечение S тела какой-нибудь плоскостью Oxy, параллельной плоскости П. При плоскопараллельном движении все точки тела, лежащие на прямой ММ / , перпендикулярны к сечению (S), то есть к плоскости П движутся тождественно и в каждый момент времени имеют одинаковые скорости и ускорения. Поэтому для изучения движения всего тела достаточно изучить, как движется сечение S тела в плоскости Oxy.

 (4.1)
(4.1)
Уравнения (4.1) определяют закон происходящего движения и называются уравнениями плоскопараллельного движения твердого тела.
2. Разложение плоскопараллельного движения на поступательное
вместе с полюсом и вращательное вокруг полюса
Покажем, что плоское движение слагается из поступательного и вращательного. Для этого рассмотрим два последовательных положения I и II, которые занимает сечение Sдвижущегося тела в моменты времени t1 и t2= t1 + Δt. Легко видеть, что сечение S, а с ним и все тело можно привести из положения I в положение II следующим образом: переместим сначала тело поступательно, так, чтобы полюс А, двигаясь вдоль своей траектории, пришел в положение А2. При этом отрезок A1B1займет положение , а затем повернем сечение вокруг полюса А2 на угол Δφ1.

Следовательно, плоскопараллельное движение твердого тела слагается из поступательного движения, при котором все точки тела движутся так же как полюс А и из вращательного движения вокруг этого полюса.
При этом следует отметить, что вращательное движение тела происходит вокруг оси, перпендикулярной к плоскости П и проходящей через полюс А. Однако для краткости мы будем в дальнейшем называть это движение просто вращением вокруг полюса А.
Поступательная часть плоскопараллельного движения описывается, очевидно, первыми двумя из уравнений (2. 1), а вращение вокруг полюса А — третьим из уравнений (2. 1).
Основные кинематические характеристики плоского движения

В качестве полюса можно выбирать любую точку тела

Вывод : вращательная составляющая плоского движения от выбора полюса не зависит, следовательно, угловая скорость ω и угловое ускорение e являются общими для всех полюсов и называются угловой скоростью и угловым ускорением плоской фигуры
Векторы и направлены по оси, проходящей через полюс и перпендикулярной плоскости фигуры
 |  |
 |  |
3. Определение скоростей точек тела
Теорема: скорость любой точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг полюса.
При доказательстве будем исходить из того, что плоскопараллельное движение твердого тела слагается из поступательного движения, при котором все точки тела движутся со скоростью vА и из вращательного движения вокруг этого полюса. Чтобы разделить эти два вида движения, введем две системы отсчета: Oxy – неподвижную, и Ox1y1 – движущуюся поступательно вместе с полюсом А. Относительно подвижной системы отсчета движение точки М будет «вращательным вокруг полюса А».

Таким образом, скорость любой точки М тела геометрически складывается из скорости какой-нибудь другой точки А, принятой за полюс, и скорости точки М в ее вращательном движении вместе с телом вокруг этого полюса.
Геометрическая интерпретация теоремы

Следствие 1. Проекции скоростей двух точек твердого тела на прямую, соединяющую эти точки, равны друг другу.
 |

 |  |
4. План скоростей
Планом скоростей называется диаграмма, на которой из произвольно выбранного полюса откладываются скорости точек, а вращательные скорости звеньев из плюса не выходят и располагаются перпендикулярно звеньям.
Построение плана скоростей базируется на соотношениях (3.6)

Откуда следует, что отрезки, соединяющие концы векторов скоростей на плане скоростей, перпендикулярны отрезкам, соединяющим соответствующие точки плана, и по модулю пропорциональны этим отрезкам, а их отношение равно угловой скорости плоской фигуры.
 (3. 6′)
(3. 6′)
Техническая механика
Плоскопараллельное движение
Понятие о плоскопараллельном движении
Плоскопараллельным движением твердого тела называется такое движение, при котором все точки тела перемещаются в плоскостях, параллельных какой-то одной плоскости, называемой основной плоскостью.
Примерами плоскопараллельного движения могут служить движение колеса на прямолинейном участке пути, движение шатуна кривошипно-ползунного механизма.
Из определения плоскопараллельного движения следует, что любая прямая АВ , проведенная в теле перпендикулярно основной плоскости, движется поступательно. Для определения движения тела на каждой прямой, перпендикулярной основной плоскости, достаточно знать движение только одной точки.
Взяв эти точки в одной плоскости, параллельной основной, получим сечение S , движение которого будет определять движение всего тела.
Но плоское движение сечения S вполне может быть определено движением любых двух точек, лежащих в этом сечении. На основании этого можно утверждать, что плоскопараллельное движение тела может быть определено движением отрезка прямой в плоскости, параллельной основной.
Плоскопараллельное движение изучается двумя методами: методом мгновенных центров скоростей и методом разложения плоскопараллельного движения на простейшие движения — поступательное и вращательное.
Метод мгновенных центров скоростей
В основе этого метода лежит следующая теорема: всякое плоскопараллельное перемещение твердого тела может быть получено одним вращением около оси, перпендикулярной основной плоскости .
Пусть отрезок, определяющий плоскопараллельное движение тела, за конечный промежуток времени переместился из положения АВ в положение А1В1 (см. рис. 3) .

Соединим точки А и А1 , В и В1 прямыми линиями и из середин полученных отрезков (точек М и N ) восстановим перпендикуляры до их взаимного пересечения в точке О . Эту точку соединим с концами отрезков АВ и А1ВВ1 прямыми линиями, и получим при этом два равных (конгруэнтных) треугольника, имеющих общую вершину О :
Треугольник АОВ совмещается с треугольником А1ОВ1 путем поворота на угол φ вокруг точки О , называемой центром конечного поворота .
Точка О есть след оси конечного поворота, перпендикулярной основной плоскости. Таким образом, отрезок АВ , определяющий плоскопараллельное движение тела, перемещается в любое новое положение путем одного вращения вокруг оси конечного поворота.
Приведенное доказательство будет справедливо и в том случае, если перемещение тела произойдет за бесконечно малый промежуток времени Δt .
В пределе при Δt стремящемся к нулю, вращение будет происходить вокруг мгновенной оси, след которой в плоскости фигуры называется мгновенным центром скоростей .
Очевидно, что скорость точки, являющейся в данный момент мгновенным центром скоростей, равна нулю. Угловая скорость ω , с которой происходит мгновенное вращение, называется мгновенной угловой скоростью.
Точка неподвижной плоскости, совпадающая в данный момент времени с мгновенным центром скоростей плоской фигуры, называется мгновенным центром вращения .
Если прямая АВ движется параллельно самой себе, то можно полагать, что тело вращается вокруг оси, удаленной в бесконечность, иначе говоря, поступательное движение можно рассматривать, как вращательное по кругу бесконечно большого радиуса.
Таким образом, плоскопараллельное движение тела может рассматриваться, как непрерывная цепь последовательных мгновенных поворотов вокруг мгновенных осей вращения.
Следует отметить, что методом мгновенных центров скоростей можно пользоваться только для определения скоростей точке плоской фигуры, но не при определении траекторий и ускорений этих точек.
Свойства мгновенного центра скоростей
Рассматривая в каждый момент времени сложное плоскопараллельное движение как простейшее — вращательное, можно для вычисления скоростей точек твердого тела применять формулы вращательного движения.
Из закона распределения скоростей точек твердого тела, вращающегося вокруг неподвижной оси, можно установить следующие свойства мгновенного центра скоростей:
- Скорость мгновенного центра скоростей равна нулю;
- Мгновенный центр скоростей лежит на перпендикуляре, восстановленном из точки к направлению ее скорости;
- Скорость точки равна произведению мгновенной угловой скорости на расстояние точки от мгновенного центра скоростей (см. рис. 4) : vА = ωОА .

На основании этих свойств можно установить следующие способы определения положения мгновенного центра скоростей плоской фигуры, определяющей плоскопараллельное движение:
1. Если известны мгновенная угловая скорость ω и скорость vА точки А плоской фигуры, то мгновенный центр скоростей будет находиться на перпендикуляре, восстановленном из точки А к вектору скорости vА на расстоянии ОА = vА/ω (см. рис 4) .
2 . Если известны направления скоростей двух точек А и В плоской фигуры (рис. 5а) , то мгновенный центр скоростей будет находиться на точке О пересечения двух перпендикуляров, восстановленных из точек А и В к направлениям их скоростей, причем
т. е. скорости точек плоской фигуры прямо пропорциональны их расстояниям от мгновенного центра скоростей.
3. Если известно, что скорости двух точек А и В плоской фигуры параллельны друг другу, направлены в одну сторону, перпендикулярны отрезку АВ и по модулю не равны (рис. 5б) , то мгновенный центр скоростей О будет находиться в точке пересечения прямой, соединяющей начала векторов vА и vВ с прямой, соединяющей концы этих векторов.
Если векторы скоростей А и В равны между собой, то мгновенный центр скоростей в данный момент времени находится в бесконечности, мгновенная угловая скорость ω равна нулю, скорости всех точек плоской фигуры будут одинаковы и движение будет мгновенно поступательным.

4. Если скорости двух точек А и В плоской фигуры параллельны друг другу, направлены в противоположные стороны и перпендикулярны отрезку АВ (см. рис. 5в) , то мгновенный центр скоростей О будет находиться в точке пересечения отрезка АВ с прямой, соединяющей концы векторов vА и vВ .
5. Если плоская фигура катится без скольжения по неподвижной кривой, мгновенный центр скоростей О будет находиться в точке соприкосновения фигуры с кривой, так как скорость этой точки фигуры относительно кривой равна нулю (скольжение отсутствует).
На рис. 6 приведены положения мгновенного центра скоростей (МЦС) и графики скоростей точек вертикального диаметра колеса при различных случаях его качения по прямолинейному рельсу (скольжение, качение, буксование и т. п.).

Разложение плоскопараллельного движения на вращательное и поступательное
В основе этого метода лежит следующая теорема: всякое плоскопараллельное перемещение твердого тела может быть получено с помощью одного вращательного и одного поступательного движения.
Пусть за время Δt отрезок АВ , определяющий плоскопараллельное движение тела, переместился в положение А1В1 . Предположим, что отрезок АВ вначале перемещался только поступательно, причем все его точки двигались одинаково, как, например, точка А . Таким образом, отрезок переместился в положение А1В2 , после чего его можно переместить в положение А1В1 посредством только вращательного движения вокруг точки А1 .
Очевидно, что сложное плоскопараллельное движение состоит из двух простейших движений – поступательного и вращательного, причем можно считать, что эти движения совершаются одновременно.
Установим зависимость между векторами скоростей точек А и В . Для этого соединим прямыми точки А , А1 и В , В1 , в результате чего получим следующую зависимость между векторами перемещений точки В :
Так как ВВ2 = АА1 , то можно записать, что ВВ1 = АА1 + В2В1 .
Разделим все члены равенства на Δt и перейдем к пределу при Δt стремящемся к нулю:
где vА и vВ – векторы абсолютных скоростей соответствующих точек, vВА – вектор скорости точки В в относительном вращательном движении отрезка АВ вокруг точки А , направленный перпендикулярно отрезку АВ .
Таким образом, плоскопараллельное движение тела может осуществляться путем одновременно происходящих вращательного и поступательного движений; поступательное движение можно считать переносным, а вращательное – относительным.
Вектор абсолютной скорости произвольной точки В равен вектору абсолютной скорости любой другой точки А плюс вектор скорости точки В в относительном вращательном движении отрезка АВ вокруг точки А .
Точку, вокруг которой происходит относительное вращательное движение, называют полюсом .
Если за полюс вместо точки А принять точку В , то, рассуждая аналогично, получим:
Если сравнить это векторное равенство с предыдущим, становится очевидным, что векторы относительных скоростей vВА и vАВ по модулю равны между собой, т. е. vВА = vАВ .

Из рис. 7 видно, что направление относительного вращения и угол поворота отрезка АВ за какой-то промежуток времени не зависит от выбора полюса, т. е. φВА = φАВ .
Продифференцировав это равенство по времени, получим:
Следовательно, относительная угловая скорость от выбора полюса не зависит. Аналогичный вывод можно сделать и об относительном угловом ускорении:
dωBA/dt = dωAB/dt или αВА= αАВ .
На основании вышеизложенного можно сделать вывод, что при разложении плоскопараллельного движения на поступательное и вращательное поступательная составляющая движения в общем случае зависит от выбора полюса, а вращательная составляющая от выбора полюса не зависит.
Так как за полюс может быть выбрана любая точка плоскости, в том числе и мгновенный центр скоростей, то при разложении плоскопараллельного движения на поступательное и вращательное угловая скорость относительного вращательного движения всегда равна абсолютной угловой скорости.
Если векторное равенство vА = vВ + vАВ спроецировать на направление прямой АВ , то получим, что проекция vА равна проекции vВ , так как проекция vАВ равна нулю. Следовательно, при плоскопараллельном движении проекции скоростей двух точек плоской фигуры на направление прямой, соединяющей эти точки, равны между собой.
Плоскопараллельное движение тела в теоретической механике
Плоскопараллельное движение тела:
Сложное плоскопараллельное движение твердого тела составляется из поступательного и вращательного движений. Это свойство является основой первого способа определения скорости любой точки тела, находящегося в плоскопараллельном движении.
1. Поступательная часть плоскопараллельного движения принимается за переносное и зависит от движения какой-либо произвольно выбранной точки, называемой полюсом. За полюс принимают всегда ту точку, скорость которой в данный момент известна. 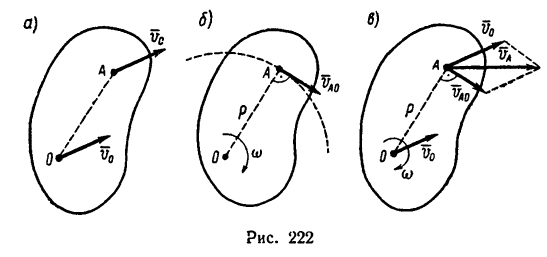
Если движение является только поступательным, то все точки тела, в том числе и точка А (рис. 222, а), имеют ту же скорость, что и полюс О.
2. Вращательная часть плоскопараллельного движения вокруг выбранного полюса принимается за относительное.
Если движение тела является только вращательным, то точка А совершает движение по окружности с центром в полюсе О со скоростью
3. Абсолютная скорость  точки А равна геометрической сумме переносной скорости полюса
точки А равна геометрической сумме переносной скорости полюса  и ее относительной скорости
и ее относительной скорости  вокруг полюса О (рис. 222, в). Таким образом, абсолютная скорость определяется либо при помощи правила параллелограмма, либо правила треугольника.
вокруг полюса О (рис. 222, в). Таким образом, абсолютная скорость определяется либо при помощи правила параллелограмма, либо правила треугольника.
Второй способ определения скорости любой точки тела при его плоскопараллельным движении основан на использовании в качестве полюса мгновенного центра скоростей.
1. Как известно, мгновенным центром скоростей называется расположенная в плоскости сечения точка, абсолютная скорость которой в данный момент равняется нулю.
2. Если за полюс принять мгновенный центр скоростей, то в этот момент переносные (поступательные) скорости всех точек тела равны нулю и абсолютная скорость любой точки определяется по формуле

где  —угловая скорость плоского сечения, которая не зависит от выбора полюса;
—угловая скорость плоского сечения, которая не зависит от выбора полюса;
р—расстояние от мгновенного центра скоростей С до данной точки (рис. 223).
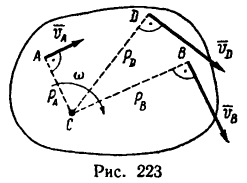
Для скоростей любых точек сечения имеем зависимость
В приведенных решениях задач -показаны оба способа. При самостоятельном решении задач можно использовать любой из двух.
При решении некоторых задач оказывается целесообразным использовать теорему о равенстве между собой проекций скоростей двух точек плоского сечения на прямую, соединяющую эти точки.
Задача №1
Стержень АВ двигается в плоскости чертежа. В момент, когда стержень занимает горизонтальное положение (рис. 224, а), скорость его точки А равна 2 м/сек и направлена под углом а=60° к прямой АВ. Определить скорость точки В, если известно, что она направлена вдоль АВ.
Решение 1—сложение переносной и относительной скоростей (рис. 224, б).
1. Примем за полюс точку А. Вместе с полюсом стержень АВ движется поступательно, поэтому точка В как слагаемая скорость имеет скорость полюса, т. е.  которую изобразим у точки В вектором ВК
которую изобразим у точки В вектором ВК
2. Вследствие вращения стержня вокруг полюса точка В имеет вторую слагаемую скорость  — относительную скорость, направленную перпендикулярно к стержню.
— относительную скорость, направленную перпендикулярно к стержню.
3. Построим параллелограмм скоростей. В параллелограмме известно направление диагонали, которая изобразит искомую скорость  поэтому из точки К проведем до пересечения с продолжением АВ отрезок KL, параллельный направлению относительной скорости
поэтому из точки К проведем до пересечения с продолжением АВ отрезок KL, параллельный направлению относительной скорости  Затем из точки L проведем прямую LD, параллельную КВ (или вектору
Затем из точки L проведем прямую LD, параллельную КВ (или вектору  , до пересечения в точке D с линией, характеризующей направление
, до пересечения в точке D с линией, характеризующей направление  Получается параллелограмм BKLD, в котором диагональ BL изображает
Получается параллелограмм BKLD, в котором диагональ BL изображает  —скорость точки В.
—скорость точки В.
4. Находим числовое значение 
 BLK —прямоугольный (KL
BLK —прямоугольный (KL  BL), поэтому
BL), поэтому

Решение 2 — при помощи мгновенного центра скоростей (рис. 224, в).
1. Из точек А и В проведем две прямые, перпендикулярные к направлениям скоростей  Точка С пересечения этих прямых и определит положение мгновенного центра скоростей.
Точка С пересечения этих прямых и определит положение мгновенного центра скоростей.
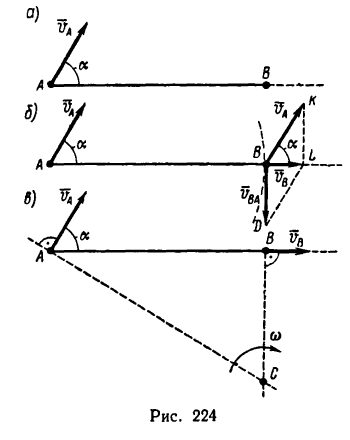
2. Вращение стержня АВ вокруг мгновенного центра скохарактеризуется угловой скоростью 
Поэтому
Отсюда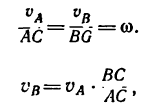
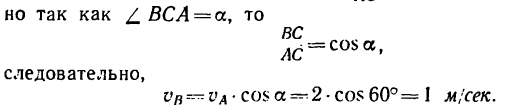
Решение 3—с применением теоремы о проекциях скоростей двух точек плоского сечения.
1. В рассматриваемом случае искомая скорость  направлена вдоль прямой, соединяющей точки A и В; при этом известен угол между данной скоростью
направлена вдоль прямой, соединяющей точки A и В; при этом известен угол между данной скоростью  и той же прямой АВ. Поэтому удобно применить теорему: проекции скоростей двух точек плоского сечения на прямую, соединяющую эти точки, равны между собой.
и той же прямой АВ. Поэтому удобно применить теорему: проекции скоростей двух точек плоского сечения на прямую, соединяющую эти точки, равны между собой.
2. Спроектировав данную скорость  и искомую
и искомую  на прямую АВ (см. рис. 224, в) и приравняв эти проекции, получим
на прямую АВ (см. рис. 224, в) и приравняв эти проекции, получим 
При решении подобных задач иногда приходится выполнять довольно много промежуточных вычислений. Их можно избежать, если решить задачу графическим методом, но с приближенным результатом.
Поясним это на примере следующей задачи.
Задача №2
Кривошип  кривошипно шатунного механизма (рис. 225, а) вращается с угловой скоростью
кривошипно шатунного механизма (рис. 225, а) вращается с угловой скоростью = 25 рад/сек. Длина шатуна, приводящего ползун В в возвратно-поступательное движение вдоль горнтальных направляющих, равна
= 25 рад/сек. Длина шатуна, приводящего ползун В в возвратно-поступательное движение вдоль горнтальных направляющих, равна  Определить скорость ползуна В в тот момент, когда ОА образует с горнзонталью угол а = 30°.
Определить скорость ползуна В в тот момент, когда ОА образует с горнзонталью угол а = 30°.
Решение 1 — при помощи мгновенного центра скоростей (решение путем сложения переносной и относительной скоростей рекомендуется выполнить самостоятельно).
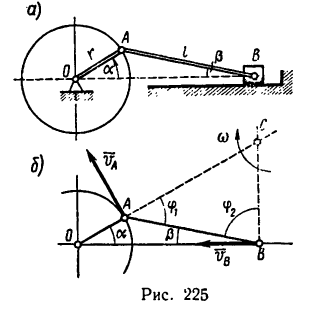
1. Изобразим на рис. 225, б расчетную схему. Схематично покажем кривошип ОА и шатун АВ в заданном положении. Ползун В, можно отождествить с точкой В.
2. Замечаем, что кривошип cobcj ползун В движется поступательно, ■ параллельное движение.
3. Скорость точки А направлю шипу 0/1 (по касательной к окр точка А). Ее числовое значение
точки А направлю шипу 0/1 (по касательной к окр точка А). Ее числовое значение

Скорость  точки В направлена
точки В направлена
Проведем из точек А и В пря правлениям скоростей  Пай мгновенный центр скоростей шатунг
Пай мгновенный центр скоростей шатунг
4. Найдя положение мгновенноп центра скоростей, получим = 0).
Отсюда 
но предварительно нужно узнать значение отношения  которое,
которое,
как легко заметить, равно отношению синусов противолежащих углов (теорема синусов):
5. Чтобы определить величину этого отношения, необходимо определить углы 
Замечая, что (см. рис. 225, б)
найдем угол  применив теорему синусов к
применив теорему синусов к 
Из того же рис. 225, б видно, что угол  является одним из внешних углов
является одним из внешних углов  ОВА, поэтому
ОВА, поэтому

6. Теперь можно определить числовое значение скорости ползуна В:

Решение 2—графическим методом.
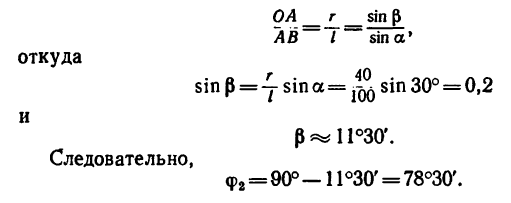
1. Построим в масштабе =2,22 см/мм схему кривошипношатунного механизма в заданном положении (рис. 226).
=2,22 см/мм схему кривошипношатунного механизма в заданном положении (рис. 226).
2. Скорость  = 10 м/сек точки А изобразим отрезком АК =18 мм. Значит масштаб скоростей
= 10 м/сек точки А изобразим отрезком АК =18 мм. Значит масштаб скоростей

3. Из точки В построим вектор  (вектор ВЬ равен вектору
(вектор ВЬ равен вектору  и параллелен отрезку АК)- Из точки b построим до пересечения с линией ВО (направлением скорости
и параллелен отрезку АК)- Из точки b построим до пересечения с линией ВО (направлением скорости  отрезок bа, перпендикулярный к- ВА. Получившийся на линии ВО вектор Ва изображает искомую скорость
отрезок bа, перпендикулярный к- ВА. Получившийся на линии ВО вектор Ва изображает искомую скорость 
4. Измерив длину отрезка Ва, найдем, что Ва — 12 мм. Следовательно, числовое значение скоростей точки В

5. Как видно, между результатом, вычисленным при помощи мгновенного центра скоростей (6,75), и результатом, найденным при графическом решении (6,66), имеется расхождение, равное
0,09 (абсолютная ошибка). Следовательно, относительная ошибка, допущенная в графическом решении, составляет 
Задача №3
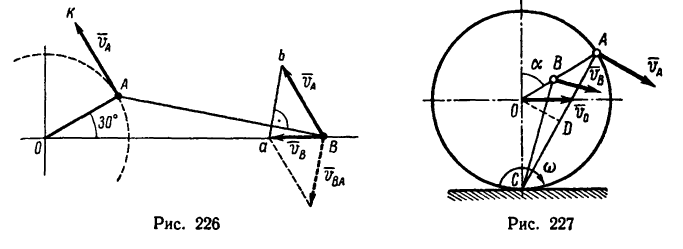
Колесо катится без скольжения по горизонтальной плоскости, причем ось колеса перемещается равномерно со скоростью  = 5 м/сек. Определить абсолютную скорость точки А на ободе колеса и точки В, находящейся на том же радиусе, в момент, когда радиус колеса, равный ОА = г=40 см, образует с вертикалью угол а=60° (рис. 227). Расстояние ОВ = 15 см.
= 5 м/сек. Определить абсолютную скорость точки А на ободе колеса и точки В, находящейся на том же радиусе, в момент, когда радиус колеса, равный ОА = г=40 см, образует с вертикалью угол а=60° (рис. 227). Расстояние ОВ = 15 см.
Решение 1—при помощи мгновенного центра скоростей.
1. Колесо катится без скольжения, следовательно, точка С соприкосновения колеса с горизонтальной плоскостью является мгновенным центром скоростей, так как абсолютная скорость этой точки ос=0 Если принять точку С за полюс, то можно считать, что в данный момент колесо совершает вращение вокруг так называемой мгновенной оси, перпендикулярной к плоскости колеса и проходящей через точку С (мгновенный центр скоростей).
2. Определяем угловую скорость колеса:

3. Определяем абсолютную скорость точки А. Скорость направлена перпендикулярно к прямой АС, соединяющей точку А с мгновенным центром скоростей С, 


4. Определяем абсолютную скорость точки В. Скорость у0 направлена перпендикулярно к примой СВ и численно равна

Решение 2 —при помощи сложения переносной и относительной скоростей.
1. Катящееся колесо совершает сложное движение, складывающееся из поступательного движения колеса вместе с осью О (переносного движения) и вращения колеса вокруг оси О (относительного движения).
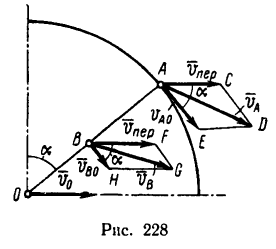
2. Абсолютная скорость  точки А при таком рассмотрении движения колеса равна диагонали параллелограмма ACDE, построенного на переносной
точки А при таком рассмотрении движения колеса равна диагонали параллелограмма ACDE, построенного на переносной  и относительной
и относительной  скоростях точки А (рис. 228).
скоростях точки А (рис. 228).
3. Переносная скорость точки А равна скорости  колеса.
колеса.
Найдем относительную скорость
 точки А;
точки А;  Но угловая скорость относительного вращательного движения, как известно, не зависит от выбора полюса, поэтому, приняв за полюс
Но угловая скорость относительного вращательного движения, как известно, не зависит от выбора полюса, поэтому, приняв за полюс
точку С (см. рис. 227), найдем, что  Следовательно, с
Следовательно, с
 (так как СО = АО — радиус колеса).
(так как СО = АО — радиус колеса).
Таким образом, для точки, расположенной на ободе катящегося без скольжения колеса,

^пер — Vao === Последовательно, параллелограмм ACDE есть ромб с углом САЕ = а = 60°, поэтому

4. Абсолютная скорость vB точки В равна диагонали параллелограмма BFGH, построенного на переносной скорости  и па относительной скорости
и па относительной скорости  и ее числовое значение можно определить по формуле
и ее числовое значение можно определить по формуле

Но предварительно необходимо найти скорость  которая определяется из соотношения
которая определяется из соотношения

Задача №4
Две параллельные рейки (рис. 229, а) движутся в противоположные стороны с постоянными скоростями  = 8 м/сек и
= 8 м/сек и  = 2 м/сек. Между рейками зажат диск радиусом r = 0,5 м, катящийся по рейкам без скольжения.
= 2 м/сек. Между рейками зажат диск радиусом r = 0,5 м, катящийся по рейкам без скольжения.
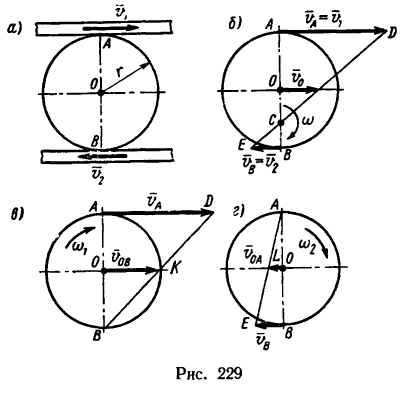
Найти угловую скорость диска и скорость его центра.
Решение 1— при помощи мгновенного центра скоростей.
1. В данном случае известны скорости реек. Но так как диск катится между ними без скольжения, точки А и В в местах соприкосновения диска с рейками имеют те же скорости. Следовательно, 
 Как видно, точки А и В лежат на прямой, перпендикулярной к направлениям этих скоростей. Соединив концы D и E векторов AD и BE, изображающих скорости
Как видно, точки А и В лежат на прямой, перпендикулярной к направлениям этих скоростей. Соединив концы D и E векторов AD и BE, изображающих скорости  найдем на прямой АВ точку С — мгновенный центр скоростей диска.
найдем на прямой АВ точку С — мгновенный центр скоростей диска.
2. Скорость  центра диска определяется по формуле
центра диска определяется по формуле
где  — угловая скорость диска.
— угловая скорость диска.
3. Величины угловой скорости  и расстояния ОС находим из равенств:
и расстояния ОС находим из равенств: 
Так как левые части обоих равенств равны между собой, то 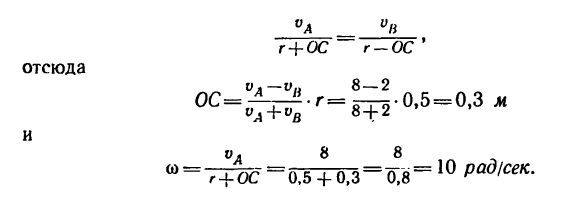
4. Находим скорость 

Решение 2—методом последовательной остановки реек.
1. Плоское движение диска образуется вследствие независим мого друг от друга перемещения реек. Поэтому скорость центра диска можно получить как результат геометрического сложения скоростей, получаемых точкой О от перемещения каждой рейки.
2. Мысленно остановим нижнюю рейку (рис. 229,в). Тогда благодаря передвижению верхней рейки диск будет катиться по нижней без скольжения и в точке В образуется мгновенный центр скоростей.
Соединим точку В с точкой D (концом вектора  и получим треугольник BAD, в котором вектор
и получим треугольник BAD, в котором вектор  изображает скорость центра диска при неподвижной нижней рейке.
изображает скорость центра диска при неподвижной нижней рейке.
Так как ОК — средняя линия треугольника BAD,
Угловая скорость диска в этом движении
3. Теперь мысленно остановим верхнюю рейку (рис. 229 г). Диск будет катиться без скольжения по верхней рейке, имея мгновенный центр скоростей в точке А.
Соединив точку А с концом Е вектора  получим треугольник АВЕ, определяющий скорость
получим треугольник АВЕ, определяющий скорость  центра диска при неподвижной верхней рейке.
центра диска при неподвижной верхней рейке.
И здесь OL — средняя линия треугольника АВЕ, поэтому
Угловая скорость диска в этом движении

4. При одновременном движении обеих реек скорость центра диска

так как обе скорости  направлены вдоль одной прямой, но в противоположные стороны.
направлены вдоль одной прямой, но в противоположные стороны.
5. Угловая скорость диска определяется как сумма угловых скоростей найденных выше:
найденных выше:

| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Определение передаточных отношений различных передач
- Задачи на поступательное движение тела
- Задачи на вращательное движение тела
- Равновесие тяжелой рамы
- Кинематический способ определения радиуса кривизны траектории
- Равномерное вращательное движение
- Равнопеременное вращательное движение
- Неравномерное вращательное движение
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://k-a-t.ru/tex_mex/12-kinematika_ploskoparall/index.shtml
http://www.evkova.org/ploskoparallelnoe-dvizhenie-tela-v-teoreticheskoj-mehanike