Уравнения движения космического аппарата вокруг центра масс
Ликбез по ориентации космического аппарата (КА) или алаверды Mightywill и lozga
Как я уже писал, к сожалению даже на geektimes количество специалистов незначительно. Большинство не верит в формулы, а полагается только на свои здравые рассуждения. При этом мы так любим посмеяться над подрастающим поколением. Мы-то лучше, мы учились по книжкам, не сидели целыми днями в планшетах. До последнего надеюсь, что мне не повезло с выборкой и всё не так плохо.
Столкнулся со следующим массовым заблуждением:
чем выше точность ориентации космического аппарата, тем менее мощным должен быть двигатель
Непосредственно после приведения ориентации к заданной следует режим поддержания заданной ориентации. Характерным для космического полета является отсутствие демпфирующих сил. Поскольку в процессе поддержания заданной ориентации технически невозможно обеспечить нулевое значение угловой скорости КА, то даже незначительные остаточные угловые скорости в условиях отсутствия демпфирующих сил будут постоянно уводить КА от заданного углового положения. Для удержания требуемого углового положения необходимо периодически включать УРД для парирования отклонений КА. В результате поддержание заданной ориентации представляет собой процесс автоколебаний около требуемого углового положения.
Основными требованиями к характеристикам режимов приведения и поддержания заданной ориентации являются:
Ограничение на максимальный угол отклонения КА от требуемого углового положения φmax. Данное требование обусловлено следующим обстоятельством. Оптические датчики, используемые в системах ориентации (например, астровизорные датчики, инфракрасный построитель местной вертикали и др.), имеют ограниченный угол обзора. В процессе приведения ориентации к заданной, вследствие действия инерционных сил, КА неизбежно будет проходить требуемое угловое положение на некоторый угол. При этом, чтобы оптический ориентир (звезда, Солнце, Земля и др.) не ушел из поля зрения датчика, ограничивается максимальный угол отклонения КА от требуемого углового положения после захвата ориентира оптическим датчиком. Реальные значения φmax составляют величины порядка нескольких десятков градусов.
Требуемая точность ориентации КА φт, представляющая собой максимальное отклонение КА от требуемого углового положения в процессе поддержания заданной ориентации. Требования к зависят, в основном, от решаемых космическим аппаратом задач и вида используемой целевой системы. Для большинства КА требуемая точность ориентации лежит в диапазоне 0,5 — 15 град.
Требуемое время поддержания заданной ориентации.
При реализации режимов приведения ориентации к заданной и поддержания заданной ориентации используется информация, получаемая от датчиков углового положения КА и датчиков угловой скорости КА. Датчики имеют определенную зону нечувствительности. Обозначим зону нечувствительности датчика угла φ0, зону нечувствительности датчика угловой скорости — ω0. Если угол отклонения КА от требуемого углового положения φ и угловая скорость КА ω будут находиться соответственно в диапазонах -φ0
Оптимальное управление орбитальной ориентацией космического аппарата на основе алгоритма с прогнозирующей моделью Текст научной статьи по специальности « Физика»
Похожие темы научных работ по физике , автор научной работы — Микрин Е. А., Зубов Н. Е., Негодяев С. С., Богачев А. В.
Текст научной работы на тему «Оптимальное управление орбитальной ориентацией космического аппарата на основе алгоритма с прогнозирующей моделью»
Е.А. Микрин1,2, Н.Е. Зубов1,2, С.С. Негодяев2,3, А.В. Богачев1,2
1 Ракетно-космическая корпорация «Энергия» им. С.П. Королёва
2 Московский физико-технический институт (государственный университет)
3 Центральный научно-исследовательский институт химии и механики им. Д.И. Менделеева
Оптимальное управление орбитальной ориентацией космического аппарата на основе алгоритма с прогнозирующей моделью
Рассматривается задача построения орбитальной ориентации КА на основе алгоритма оптимального управления с прогнозирующей моделью с использованием параметров Род-рига-Гамильтона. Получены аналитические выражения для вычисления управлений.
Во время полета космического аппарата (КА) систематически используется орбитальная ориентация. Она необходима для проведения некоторых научных экспериментов, осуществления сближения КА и выполнения ряда других задач. Многократность повторения этого режима при длительном сроке активного существования КА, ограниченные запасы рабочего тела на борту КА, высокая точность построения ориентации требуют исследования вопросов оптимизации данного режима. В данной статье продолжаются исследования, начатые в [1], которые основаны на использовании методов синтеза оптимального управления с помощью метода аналитического конструирования по критерию обобщенной работы в редакции с прогнозирующей моделью. Отличие заключается в том, что в описании вращательного движения КА используется форма записи уравнений, основанная на применении кватернионов вместо направляющих косинусов, и в качестве действия внешних моментов учитываются не только гравитационный и управляющий моменты, но и магнитный, аэродинамический, а также момент от светового давления.
II. Уравнения движения космического аппарата
Для записи уравнений движения космического аппарата вокруг центра масс введем правые системы координат 1:
Охуг — система координат, жестко связанная с КА. Точка О — центр масс КА; оси Ох,Оу,Ог — главные центральные оси инерции КА.
ОХУZ — орбитальная система координат. Ось OZ направлена вдоль радиуса вектора точки О относительно центра Земли, ось ОХ направлена по касательной к орбите в сторону движения КА, ось OY перпендикулярна плоскости орбиты.
OZ\Z2Zз — магнитная система координат, связанная с вектором Н напряженности магнитного поля земли в точке О. Оси магнитной системы координат относительно орбитальной определяются матрицей направляющих косинусов ^МрЦ.
OZс\Zс‘lZcз — солнечная система координат, связанная с вектором Б светового потока в точке
О. Оси солнечной системы координат относительно орбитальной определяются матрицей направляющих косинусов
Пусть система координат Охуг вращается относительно инерциального пространства с угловой скоростью ш (ш = [шх]т), а соответственно базис ОХУZ — с угловой скоростью
Кинематическое уравнение, определяющее положение базиса Охуг относительно базиса ОХУZ с использованием параметров Родрига-Гамильтона, в соответствии с [2, 3] будет иметь вид
Динамические уравнения пространственного вращательного движения КА имеют вид
Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Здесь Q = pVjScx/2 — сила сопротивления, p — плотность атмосферы, S — площадь миделева сечения КА, сх — коэффициент лобового сопротивления.
Несмотря на то, что орбиту КА считаем круговой, при вычислении плотности набегающего воздушного потока даже малую эллиптичность орбиты следует учитывать. Зависимость этой плотности можно представить следующим образом:
Здесь п = 1/2ln(pa/pp), pa, pp — плотность атмосферы в апогее и перигее соответственно.
Момент от давления солнечных лучей в проекциях на оси связанной системы координат будем вычислять по формулам [4]:
Мсі = Рс (Г2Є13 — Г3Є12),
Мс2 = Рс (Г3Є11 — Г1Є13),
МС3 = Рс (Т1Є12 — Г2Є11), (9)
где г = (г1,г2,гз) — радиус-вектор положения центра солнечного давления КА относительно центра масс, Рс =
г(^)25′ — модуль вектора силы от давления солнечных лучей, с — скорость света, Ео — величина потока энергии светового давления, К — расстояние от центра солнца до КА, До — радиус орбиты Земли относительно Солнца, Б — площадь проекции поверхности КА, Єі- — направляющие косинусы между солнечной и связанной системами координат. Переход от солнечной системы координат к связанной осуществляется матрицей
0 С о ^ сэ Є21 Є22 Є23 = fa О о И р fa 0 с 43 О о\ и
an a12 a13 d 11 d12 d13
= a2i a22 a23 d2i d22 d23 .
азі a32 a33 d3i d32 d33
где dij при угле в между плоскостью орбиты и вектором S определяются соотношениями
Проекции управляющего момента Myi в общем
виде могут создаваться как с помощью двигателей, создаваемое угловое ускорение которых или регулируется в некотором диапазоне, или является постоянным, так и другими исполнительными органами [2]. Назначение конструируемых управлений Myi заключается в оптимальном, в определенном смысле, гашении заданных угловых скоростей Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
+в^(шУП(ік) — ^уз)2 + в6 (шП(ік) — ^гз)2
Му 1 + Му 2 + Myi
Поскольку для прогнозируемого движения iux = ujy = iuz = 0, 6x = ву = 0z = const, то на основании выражений (14) с учетом аналитических соотношений (6) -(9) можно записать алгебраические выражения, которые определяют проекции моментов Myi через параметры вектора состояния и управления КА:
M(y t) = (Jy -Jx)Ux(0)Uy (0)-Mg3-Mm3-Ma3-Mc3-Таким образом, главная часть функционала обобщенной работы, учитывающая указанные факторы и показатели, может быть назначена в виде
Ir = УЗк(хп (tk),xn (tk ),tk) +
Кач(хП (t) ,хП(т) ,t) + ,^n)]dT
[Q кач (хП(т),хП (t),t) + QP(un^n,un)>dT-
Компонентами вектора управления в данной задаче, согласно предыдущему, являются производные угловых скоростей. Принцип минимума обобщенной работы допускает использование в функционале различных норм вектора управления. В данной задаче можно использовать наиболее простую норму — квадратичную. Тогда полный функционал обобщенной работы запишется в виде
I = 1Г + 0,5 [ит(т)К-1и(т) + и^пК-1иоп(т)]Л.
Здесь К — диагональная матрица положительных коэффициентов, иоп — неизвестный до решения задачи оптимизации вектор управления в оптимальной системе.
Итак, рассматриваемая задача оптимизации переориентации КА заключается в том, чтобы указать управления, доставляющие минимум функционалу (15), на решение систем (8) или (10).
V. Решение задачи оптимизации ориентации КА
В виду наличия аналитических решений (13) уравнений (12) свободного движения и в соответствии с выражением (11), решение задачи оптимизации естественно записать в виде аналитической формы алгоритма с прогнозирующей моделью [6].
Здесь ^ <. >— транспонированная матрица Якоби (матрица — столбец). С учетом вторых уравнений систем (8), (10) будем иметь
Решение интегродифференциального уравнения
(16) в реальном времени, синхронно с поступлением параметров векторов х(0), ху (0) от бортовой аппаратуры, означает формирование оптимального, в смысле минимума, функционала обобщенной работы (15) управлений.
Уравнения (16) в скалярной форме зависят от вида функций функционала 1г. Для случая построения орбитальной ориентации за заданное время с минимизацией внешнего момента оно в скалярной форме запишется так:
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Название: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата Раздел: Рефераты по авиации и космонавтике Тип: реферат Добавлен 13:56:13 07 октября 2005 Похожие работы Просмотров: 4061 Комментариев: 21 Оценило: 6 человек Средний балл: 4.5 Оценка: 5 Скачать
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет І Кафедра «Системи та процеси
Спеціальність 7.080202 «Прикладна математика»
На одержання кваліфікації інженера-математика
Тема роботи: Розробка алгоритмів контролю та діагностики системи управління
орієнтацією космічного аппарату
Завідуючий кафедрою Голоскоков Є.Г.
Керівник дипломної роботи Кузнецов Ю. О.
Економічна частина Чекалiна Е.П
Охорона праці та
навколишнього середовища Березуцький В.В.
Цивільна оборона Гуренко І.В.
Нормоконтроль Назаров А.С.
Студент-дипломник Уханов Є.В.
Номер академічної групи І-29
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет І Кафедра «Системи та процеси
Спеціальність 7.080202 «Прикладна математика»
На виконання дипломної роботи
Студенту групи І-29 Уханову Євгенію Валерійовичу
Тема роботи: Розробка алгоритмів контролю та діагностики системи управління
орієнтацією космічного аппарату
Затверджено наказом по НТУ «ХПІ» від «___» __________ 200__ р. №_______
Термін здачі студентом закінченої роботи «___» __________ 200__ р.
Вихідні дані до роботи: 1) ГОСТ 4401-73 Стандартная атмосфераю Параметры. Издательство стандартов, 1973. 2) Киреев Н.Г. Аппроксимация и идентификация в задачах динамики полета и управления – К.:НМК ВО, 1992.-196 с. 3) Голоскоков Е.Г., Плаксий Ю.А., Фролов Ю.А. Вопросы приложения методов дифференциальной аппроксимации. – Рук. деп в ВИНИТИ 21.08.81, №4085-81, 19 с.
1. Текстові а) аналітичний огляд існуючих моделей; б) обробка теоретичного матеріалу з питань апроксимації; в) побудування моделей різного порядку;
г) аналіз побудованих моделей; д) надання рекомендацій щодо використання побудованих моделей.
Рассматривается задача построение ориентации упругого космического аппарата с учетом моментов внешних сил, возможности отказов командных приборов, таких как гироскопический измеритель вектора угловой скорости и исполнительных органов, таких как двигатели стабилизации большой и малой тяги.
Цель работы: разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата.
Разработаны алгоритмы построения ориентации упругого космического аппарата, алгоритм стабилизации реактивных двигателей системы управления космического аппарата, алгоритм идентификации отказов двигателей стабилизации. Разработана модель упругого космического аппарата с учетом аэродинамического и гравитационного момента. В законе управления введена возможность гашения шумов, с использованием гистерезиса или паузы по времени, как для двигателей большой тяги, так и для двигателей малой тяги. Для моделирования отказов одного из двигателей стабилизации разработан и внедрен в алгоритм контроля – алгоритм неполной тяги. Разработана математическая модель гироскопического измерителя вектора угловой скорости и алгоритм контроля чувствительных элементов датчика.
На базе разработанных алгоритмов и принятой модели космического аппарата, разработан программный комплекс, с применением среды визуального программирования DELPHI 7 и CAD системы визуального моделирования VisSim 5, позволяющие в полной мере моделировать сложные физические процессы с учетом всех параметров как для упругой модели, так и для абсолютно твердого тела.
Проведенное моделирование показало высокую эффективность разработанных алгоритмов, что позволяет их применять на практике.
Список ключевых слов: СИСТЕМА УПРАВЛЕНИЯ, КОСМИЧЕСКИЙ АППАРАТ, ЗАКОН УПРАВЛЕНИЯ, АЛГОРИТМ КОНТРОЛЯ.
Розглядається задача побудови орієнтації пружного космічного апарату х урахуванням моментів зовнішніх сил, можливості відмови командних приборів, таких я к гироскопічни1й вимірювач вектору кутової швидкості та виконавчих органів, таких як двигуни стабілізації великої та малої потуги.
Мета роботи: розробка алгоритмів діагностики та контролю системи управління орієнтацією космічного апарату.
Розроблені алгоритми побудови орієнтації пружного космічного апарату, алгоритм стабілізації реактивних двигунів системи управління космічного апарату, алгоритм ідентифікації відмов двигунів стабілізації. Розроблена модель пружного космічного апарату з урахуванням аеродинамічного та гравітаційного моментів. У законі управління введена можливість гасіння шумів, з використанням гістерезиса або паузи по часу, як для двигунів великої потуги, так і для двигунів малої потуги. Для моделювання відмов одного з двигунів стабілізації розроблено та впроваджено в алгоритм контролю – алгоритм неповної потуги. Розроблена математична модель гіроскопічного вимірювача вектора кутової швидкості та алгоритм контролю чутливих елементів датчика.
На базі розроблених алгоритмів та прийнятої моделі космічного апарату, розроблено програмний комплекс з використанням середовища візуального програмування DELPHI 7 та CAD системи візуального моделювання VisSim 5, які дозволяють у повному обсязі моделювати складні фізичні процеси з урахуванням усіх параметрів як для пружної моделі так і для абсолютно твердого тіла.
Проведене модулювання показало високу ефективність розроблених алгоритмів, що дозволяє їх використовувати на практиці.
Список ключових слів: СИСТЕМА УПРАВЛІННЯ, КОСМІЧНИЙ АПАРАТ, ЗАКОН УПРАВЛІННЯ, АЛГОРИТМ КОНТРОЛЮ.
Volume 169 pages, case histories 71, tables 18, references 37.
The problem constructing of attitude of an elastic space vehicle with allowance for of moments of external forces, possibility of failures of command instruments, such as a gyroscopic meter of angular-velocity vector and cutting heads, such as motor engines of stabilizing large and low-thrust is esteemed.
The purpose of operation: mining of check algorithms and diagnostic of the attitude control system of a space vehicle.
The algorithms of constructing by attitude of an elastic space vehicle, algorithm of stabilizing of jet engines of a management system of a space vehicle, algorithm of identifying of failures of motor engines of stabilizing are designed. The pattern of an elastic space vehicle with allowance for of aerodynamic and gravitation moment is designed. In a control law are injected a possibility of extinguishing of noises, with usage of a hysteresis or space on time, both for motor engines of large draught, and for verniers. For simulation of failures of one of motor engines of stabilizing is designed and the algorithm of incomplete draught is introduced into a check algorithm -. The mathematical model of a gyroscopic meter of angular-velocity vector and check algorithm of countermeasure feelers of the sensor is designed.
On the basis of designed algorithms and accepted pattern of a space vehicle, the programmatic complex, with applying of environment of visual programming DELPHI 7 and CAD of a system of visual simulation VisSim 5, permitting to the full is designed to model difficult(complex) physical processes with allowance for of all arguments both for the elastic pattern, and for absolute solids.
The held simulation has shown high performance of designed algorithms, that allows them to put into practice.
The agenda of keywords: a management SYSTEM, SPACE VEHICLE, CONTROL LAW, CHECK ALGORITHM.
Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность.
Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «неотключение» двигателя, кроме того, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей.
Отказы чувствительных элементов гироскопического измерителя вектора угловой скорости, могут приводить к не выполнению задачи системы управления ориентацией космического аппарата.
Существующие методы контроля работоспособности ДС являются достаточно грубыми, чтобы выявлять отказ типа «неотключение» при наличии остаточной неполной тяги двигателя на фоне действия внешних возмущающих моментов (гравитационных, аэродинамических и др.). Поэтому разработка алгоритмов идентификации отказов двигателей стабилизации, особенно отказов с неполной тягой при наличии шумов измерений и действии внешних возмущающих воздействий, является актуальной задачей.
Таким образом, разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей.
В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
1 ПОСТАНОВКА ЗАДАЧИ
Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс [1] (см. рис. 1.1).
Рис. 1.1 — Модель КА
Если триэдр жестко связанных с телом осей Oxyz, с началом координат в центре масс КА (связанная система координат — ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера [1, 2], описывающая динамику вращения КА вокруг центра масс, примет вид (1.1):
(1.1)
Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости wj с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой базовой системы координат (БСК), начало которой совпадает с началом координат ССК, а оси определенным образом ориентированы в инерциальном пространстве и движутся поступательно [1, 3, 4] . Пусть углы ориентации (углы Эйлера-Крылова) – полностью определяют угловое положение ССК относительно БСК [1, 4]. Понятие углов ориентации [2] становится однозначным лишь после того, как введена последовательность поворотов [3, 4, 5, 6] твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов: система кинематических уравнений имеет вид (1.2):
Системы (1.1) и (1.2) описывают угловое движение твердого тела относительно БСК. Будем предполагать, что углы Эйлера-Крылова jj малы [5]. Текущие значения wj оцениваются в системе по информации измерителя угловой скорости, измеряющего интегралы от проекций вектора абсолютной угловой скорости КА на оси чувствительности прибора. В качестве модели измерителя используется модель ГИВУС [6]. Алгоритм обработки данных в бесплатформенной инерциальной навигационной системе строится с использованием субоптимального дискретного фильтра Калмана [7].
Теперь усложним задачу, рассматривая космический аппарат как упругое тело, что максимально приближает имитационную модель к реальной [1, 8].
Рассмотрим уравнения осцилляторов для упругой модели (1.3):
(1.3)
где — коэффициент демпфирования для каждой отдельно взятой гармоники;
— квадрат собственной частоты недемпфированных колебаний для каждой гармоники;
— управляющий момент с учетом возможного отказа;
Ставится задача разработать алгоритмы контроля функционирования системы управления космического аппарата, для достижения которой необходимо:
— разработать алгоритм контроля функционирования двигателей стабилизации, построенный на основе субоптимального фильтра Калмана, позволяющий по информации бесплатформенной инерциальной навигационной системы идентифицировать отказы двигателей стабилизации, в том числе, отказы с неполной тягой при наличии шумов измерений и действии внешних возмущающих воздействий;
— разработать алгоритмы обработки и контроля информации ГИВУС НКА серии «Спектр», состоящие из алгоритма оценки угловой скорости на основе фильтра Льюинбергера и алгоритмы контроля чувствительных элементов ГИВУС с учетом уходов.
2 СИСТЕМЫ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КА НА БАЗЕ БИНС
Управление космическим аппаратом с помощью любой инерциальной системы, в том числе и бесплатформенной, может рассматриваться как взаимодействие двух процессов: решения навигационной задачи и решения задачи стабилизации [1, 4]. Первая задача заключается в определении требуемой траектории летательного аппарата и в вычислении фактической траектории, вторая — в управлении аппаратом для поддержания требуемого курса с заданной точностью [9].
Инерция является наиболее универсальным фактором, позволяющим создать приборы для регистрации изменения скорости тел в пространстве. Такие приборы называются акселерометрами или датчиками ускорений. Акселерометр измеряет проекцию на свою ось чувствительности ускорения той точки космического аппарата, где он установлен. Акселерометр реагирует только на силы, прикладываемые через посредство космического аппарата [1, 2]. Если одна из составляющих общей силы, определяющей ускоренное движение аппарата, обусловлена действием тяготения, то соответствующая ей составляющая ускорения не может быть измерена акселерометром. Силы же тяготения действуют одинаково как на прибор, так и на аппарат и поэтому при отсутствии других сил с помощью акселерометра не могут быть обнаружены [1, 3].
Таким образом, при движении космического аппарата в поле тяготения измеряемое акселерометром ускорение отличается от действительного, и поэтому получило название кажущегося ускорения. Измерение кажущегося ускорения позволяет определить истинное положение космического аппарата относительно центра тяготения с помощью интегрирования навигационного уравнения [1, 10]:
где R — вектор положения центра массы аппарата относительно центра тяготения;
ак — вектор кажущегося ускорения центра массы аппарата;
U — вектор-потенциал поля тяготения.
Для управления необходимо знать три ортогональных составляющих вектора ак , т. е. иметь три датчика, установленных в центре массы космического аппарата, с тремя взаимно перпендикулярными осями чувствительности. Эти оси чувствительности должны быть ориентированы по тем осям координат, в которых задан вектор R. Триэдр осей чувствительности акселерометров будем в дальнейшем называть осями измерительной системы [1, 10], а оси, в которых задан вектор R — инерциальным координатным базисом, т. е. базисом, относительно которого отсчитывается абсолютное ускорение. Оси инерции (или оси формы) космического аппарата не совпадают с инерциальным базисом, а вращаются относительно него в зависимости от направления вектора скорости центра масс космического аппарата и угла атаки. Следовательно, для управления с помощью измерения кажущихся ускорений или, как его называют, инерциального управления необходимо либо совмещать оси измерительной системы с инерциальным координатным базисом независимо от движения аппарата, либо в каждый момент времени знать взаимное расположение осей измерительной системы и инерциального базиса. В последнем случае составляющие вектора кажущегося ускорения и оси измерительной системы должны быть перепроектированы на оси инерциального координатного базиса [11].
Наиболее выгодным расположением измерительной системы для второго из названных выше вариантов инерциального управления является совмещение ее осей с осями формы аппарата [1, 3, 5, 11].
Таким образом, техническая реализация метода инерциального управления возможна в двух вариантах. Первый — это создание устройств, которые не вращаются вместе с аппаратом и, сохраняя свое положение относительно инерциального базиса, служат опорой для измерительной системы [1]. Второй вариант — создание устройств, которые обеспечивают в течение полета вычисление параметров, определяющих углы между осями измерительной системы и инерциального базиса, а также проектирование измеряемых компонент ускорения на оси этого базиса [1].
Первый вариант привел к появлению приборов, физически моделирующих инерциальный базис на борту космического аппарата, — гиростабилизированных платформ, второй — к созданию бесплатформенных систем.
По мере развития платформенных систем проявилась их ограниченность в некоторых аспектах использования и в перспективе дальнейшего совершенствования. Стали заметными такие их недостатки, как чувствительность к большим перегрузкам и углам вращения летательного аппарата, что характерно для космических полетов [12].
БИС, как и любая инерциальная система управления летательным аппаратом, состоит из двух подсистем [12, 13, 14], которые, в свою очередь, именуются навигационной системой и системой стабилизации [12]. Задача навигационной системы — определить начальное положение летательного аппарата и программу полета (курс, высоту, скорость, угол тангажа) [12, 14]. Задача системы стабилизации — обеспечить управление рулями и тягой таким образом, чтобы выполнить задаваемую программу полета с требуемой точностью [1, 15]. Проводя аналогию с неавтоматической системой управления можно сказать, что навигационная система выполняет функции штурмана, а система стабилизации — функции летчика. При автоматизации функций летчика прежде всего он освобождается от задачи демпфирования колебаний аппарата, возникающих при изменении программы полета и действии внешних возмущений [10].
Задачей теории полностью автоматизированной системы стабилизации — является обоснование выбора законов управления [3, 10, 16], т. е. соотношений, связывающих разность между измеренными текущими и программными значениями параметров движения летательного аппарата с командами на органы управления. Законы управления в современных системах стабилизации летательных аппаратов, помимо обеспечения точности, устойчивости и определенного характера переходного процесса в системе, должны оптимизировать определенные критерии. Поэтому эти законы все чаще становятся не только неголономными, но и нелинейными [1, 3, 4, 9, 17].
В платформенных системах физически реализуются углы между осями инерциального базиса и осями измерительной системы. Эти углы непосредственно и являются параметрами управления. т. е. функциями, служащими основой для получения команды на рули после преобразований в соответствии с законом управления [9, 12]. В бесплатформенной системе стабилизации связь между инерциальным и измерительным базисами выражается в процессе вычислений через параметры, которые не могут непосредственно служить параметрами управления, поэтому теория бесплатформенных систем стабилизации содержит методы получения параметров управления как функций вычисляемых параметров связи [12].
Специфика бесплатформенной системы стабилизации в отношении математического описания объекта стабилизации состоит в том, что уравнения движения космического аппарата должны быть записаны через измеряемые датчиками параметры и через параметры связи. Это упрощает замыкание систем уравнений стабилизации [9, 12, 16, 17]. И еще одна особенность теории бесплатформенных систем стабилизации — необходимость разработки методов синтеза алгоритмов, обеспечивающих вычисление параметров связи в реальном времени, а также анализа системы ошибок, сопровождающих эти вычисления [18, 19, 20].
Широкое развитие и применение гироскопических систем и приборов ориентации и навигации летательных аппаратов [1, 3, 15, 21], судов, подводных лодок и других подвижных объектов обязано свойству их автономности, которое заключается в том, что приборы и системы, основанные на применении гироскопов, в отличие от радиолокационных и оптических систем ориентации и навигации, определяют положение подвижных объектов без каких-либо физических связей с Землей, не защищенных от внешних искусственных воздействий, создающих помехи в работе этих систем или приводящих к полному нарушению их работоспособности [3, 21].
В бесплатформенных (бескарданных) системах ориентации чувствительными элементами являются гироскопические датчики первичной информации, измеряющие углы или угловые скорости поворота КА и линейные ускорения (акселерометры). Эти датчики устанавливаются непосредственно на борту КА и работают совместно с цифровой вычислительной машиной, непрерывно производя расчет углов курса, крена и тангажа или иных параметров, определяющих ориентацию КА относительно базовой системы координат [1, 9, 21].
Бесплатформенные системы характеризуются жестким закреплением чувствительных элементов (гироскопов, акселерометров) на борту КА [1, 9]. Таким образом, принцип построения бесплатформенной системы ориентации (БСО) состоит в аналитическом построении расчетной системы координат на основе информации первичных датчиков. Математические расчеты проводятся при этом в процессе движения ЕА на бортовой ЦВМ и специальных вычислителях. Наличие блока гироскопов в типовой схеме БСО связано с решением задачи ориентации [9, 12, 15].
Возможность построения реальных конструкций и схем БСО обусловлена современным уровнем развития цифровой вычислительной техники. БСО присущи следующие отличительные признаки [15]:
— отсутствие ошибок, связанных с погрешностями стабилизации собственно платформы;
— отсутствие эффекта складывания рамок и, как следствие, отсутствие ограничений на угловые маневры КА;
— упрощение механической части, уменьшение габаритов, массы и энергоемкости системы за счет отсутствия карданова подвеса;
— потенциальное повышение надежности за счет резервирования.
Однако в таких схемах в большей степени сказываются погрешности, связанные с чувствительными элементами, поскольку они работают в более жестких условиях по сравнению с такими же элементами в платформенных системах [9, 12, 21].
Коэффициенты моделей ошибок определяются конструктивными или геометрическими характеристиками чувствительных элементов, в частности, датчиков. Величина погрешностей датчиков первичной информации зависит от самого характера линейного и углового движения КА, а при фиксированном характере движения КА модель ошибок для бесплатформенной системы содержит или требует учета большего числа членов в сравнении с моделью ошибок датчика платформенной системы [1, 3, 21]. В то же время наличие вычислителя вносит дополнительные погрешности, связанные с вычислениями. Особенностью решаемой задачи является накопление в результате интегрирования ошибок выходных параметров БСО. Вычислительные ошибки могут быть двоякой природы [21]:
— ошибки, связанные с методом вычислений. При «идеальной» вычислительной машине ошибки, связанные с методом вычислений, определяются порядком применяемого метода и числом удерживаемых членов ряда;
— ошибки, связанные с данным типом вычислителя, ограниченностью его памяти, быстродействия, длиной разрядной сетки и т. п.
Кроме того, особенностью аналитического построения базиса в текущем времени является запаздывание информации при нормальном функционировании вычислителя минимум на один такт работы вычислителя, а при сбоях в вычислителе ввиду отсутствия механической памяти (стабилизированной платформы) запаздывание информации может достигать недопустимо больших величин [12, 21].
Суммарная ошибка, обусловленная погрешностями чувствительных элементов и погрешностями вычислений, приводит к неточности построения расчетной системы координат относительно базисной системы и может быть разбита на три группы [1, 3, 9, 12 ,21]:
1) группа ошибок по модулю, от которой зависит искажение величины проекции преобразуемого вектора;
2) группа ошибок от неортогональности построенного базиса;
3) группа ошибок, определяющая поворот построенного аналитически базиса относительно идеального.
Общим для систем ориентации как платформенного, так и бесплатформенного типов является построение расчетной системы координат, в которой интегрируются уравнения ориентации и навигации, реализуемой, в первом случае электромеханическими устройствами и во втором случае аналитически [1, 3].
В общем случае аналитического построения расчетной системы координат задача ориентации КА решается с привлечением информации блока акселерометров об ускорении центра масс КА, хотя в некоторых случаях удается разделить задачу угловой ориентации и задачу определения местоположения центра масс КА [1]. Возможность такого разделения определяется выбором расчетной системы координат. Типовыми могут являться инерциальная система и горизонтальные системы координат. БСО могут быть построены на базе двухстепенных гироскопов, одноосных гиростабилизаторов, трехстепенных гироскопов со свободным подвесом и других видов чувствительных элементов [21].
В БИНС для решения задачи навигации необходим пересчет (с помощью матрицы направляющих косинусов) проекций вектора кажущегося ускорения, замеренного в жестко связанных с КА осях, на инерциальные оси [1, 10].
Для получения матрицы ориентации (матрицы направляющих косинусов) оси чувствительности трехкомпонентного блока измерителей абсолютной угловой скорости (блока двухстепенных гироскопов) должны быть зафиксированы относительно соответствующих осей чувствительности блока акселерометров. При решении навигационной задачи в БИНС задача ориентации решается независимо от уравнений поступательного движения. При этом погрешности проекций кажущегося ускорения на инерциальные оси определяются как погрешностью измерений акселерометров, так и погрешностью вычисления матрицы ориентации [1, 9, 10, 12].
Если используются датчики углового положения, то ориентация измерительной системы, связанной с датчиками, относительно базовой системы координат определяется в результате непосредственных измерений и их обработки. Однако общим во всех случаях решения задачи ориентации является измерения жестко закрепленными на борту датчиками таких кинематических величин, как угол или угловая скорость (угловое ускорение), с помощью, например, двухстепенных или трехстепенных гироскопов или же разнесенных на заданной базе акселерометров [21]. При этом наличие измерителей линейных ускорений в схеме, а также информации о напряженности нецентрального гравитационного поля Земли позволяет решать для такого типа систем как задачу ориентации, так и навигации [1, 3, 9].
Возмущенный режим работы БСО — это режим, при котором учитываются инструментальные погрешности чувствительных элементов, определенные угловой скоростью и угловым и линейным ускорениями основания [1, 3, 9, 12]. Модели ошибок этих элементов содержат кинематические величины с коэффициентами, зависящими от конструктивных характеристик чувствительных элементов.
Для уменьшения ошибок в БСО используются, например, корпусы блока гироскопов в монолитном исполнении, в которых и размещаются двухстепенные гироскопы [21]. Это позволяет обеспечить достаточную жесткость осей, связанных с измерительными осями гироскопов, и необходимую точность ориентации этих осей. При решении задачи ориентации относительно инерциального пространства используются различного вида кинематические уравнения [1,3]. Сравнительная их характеристика показывает, что в общем случае вне конкретной схемы затруднительно отдать предпочтение как определенному виду кинематических уравнений, так и определенным параметрам угловой ориентации. Однако это не исключает рациональный выбор параметров ориентации в каждой конкретной схеме реализации БСО [9].
2.1 Бесплатформенные инерциальные навигационные системы
Развитие бескарданных (бесплатформенных) базовых систем отсчета стала вполне возможной после того прогресса вычислительной техники, который привел к появлению надежных бортовых цифровых вычислительных машин, обладающих нужным объемом памяти и достаточным быстродействием [15]. Это сделало возможным непрерывное интегрирование уравнений движения космического аппарата при сколь угодно сложном характере его движения, опираясь на показания, по сути, тех же датчиков первичной информации, что и используемые в платформах. Следовательно, в бесплатформенных системах громоздкие устройства подвеса со следящими приводами «заменяются» интегрированием уравнений движения [9, 15].
Типичная схема бесплатформенной системы управления космическим аппаратом показана на (рис 2.1). С бортовой цифровой вычислительной машиной 1 соединены три группы датчиков, условно обозначенных через Д1 ,
Рис 2.1 — Схема бесплатформенной системы управления ориентацией:
1 – бортовая цифровая вычислительная машина; 2 – блок согласования; 3-исполнительные органы
Д2 и Д3 ; вырабатываемые в машине сигналы управления преобразуются должным образом в блоке согласования 2, после чего поступают на исполнительные органы системы ориентации 3. Воздействуя на динамику космического аппарата (в зависимости от работы исполнительных органов, изменяется его угловое движение, и на входе вычислительной машины появляются измененные сигналы датчиков системы ориентации). На приведенной схеме все датчики условно разбиты на три группы в зависимости от основной задачи, выполняемой ими в полете.
Группа датчиков Д1 , по сути, обеспечивает существование на борту математической «платформы». Этими датчиками могут быть любые устройства, позволяющие регистрировать составляющие p, q и r угловой скорости космического аппарата, параллельные осям Ox, Oy и Oz жестко связанного с ним триэдра осей. Имея непрерывно измеряемые значения p(t), q(t), r(t), вычислительная машина интегрирует кинематические уравнения углового движения и непрерывно определяет соответствующие три угла поворота жестко связанного с корпусом космического аппарата триэдра осей Oxyz относительно некоторого условного, например, начального положения этого триэдра Ox’y’z’. Поскольку в результате вычислений положение триэдра Oxyz всегда известно для текущего момента времени с нужной точностью, постольку известно и расположение относительно корпуса космического аппарата начального триэдра Ox’y’z’. Таким образом, триэдр Ox’y’z’, положение которого относительно корпуса непрерывно вычисляется, может служить базовой системой отсчета углов для поступательно движущихся осей ориентации; в этом смысле тройка датчиков Д1 и вычислительная машина заменяют гиростабилизированные платформы [1, 3, 9, 15].
Если необходимо иметь базовую систему отсчета для орбитальных осей ориентации при известной орбите космического аппарата, то бортовая вычислительная машина должна вычислять для каждого момента времени t, кроме уже сказанного, и положение орбитальных осей ориентации Ox”, Oy”, Oz” относительно поступательно движущихся осей Ox’, Oy’, Oz’ (эти вычисления никак не связаны с работой датчиков системы ориентации, в них используются данные об орбите космического аппарата и о взаимном положении осей Ox’, Oy’, Oz’ и Ox”, Oy”, Oz” в начальный момент времени t=0, которое предполагается известным). Поскольку в машине в этом случае есть все данные о взаимном положении триэдров Ox’y’z’ и Ox”y”z”, с одной стороны, и триэдров Oxyz и Ox’y’z’, с другой, то тем самым легко вычисляется и взаимное положение триэдров Oxyz и Ox”y”z”, т.е. углы ориентации для орбитальной системы осей [3]. В этом смысле тройка датчиков Д1 и вычислительная машина, в память которой введены параметры заданной орбиты, заменяют платформу. Совершенно аналогично можно было бы вычислять в бортовой машине и углы ориентации для скоростной системы осей, поскольку их вращение в функции времени тоже определяется параметрами орбиты [1].
Приведенные примеры указывают на большую гибкость, которую сообщает управлению ориентацией использование бортовой вычислительной машины, — переход от управления относительно поступательно движущихся осей ориентации к управлению в орбитальных или скоростных осях может производиться практически мгновенно путем простого изменения программы работы машины [12, 15].
В качестве датчиков Д1 , о которых было сказано, что они являются любыми измерителями компонент угловых скоростей, могут быть использованы высокочастотные датчики угловых скоростей либо одноосные гиростабилизаторы, т.е. приборы, содержащие лишь один канал стабилизации углового положения платформы вместо трех. В рассматриваемом случае платформа не будет устанавливаться в кардановом подвесе, а будет иметь одну единственную ось вращения – ось Ox. Угол поворота платформы относительно корпуса космического аппарата вокруг этой оси обозначим через . В таком случае компонента p’ угловой скорости вращения платформы по направлению Ox относительно абсолютного пространства будет равна . Если интегрирующий гироскоп и следящая система работают идеально, то и ,следовательно, , т.е. по темпу поворота платформы одноосного гиростабилизатора относительно корпуса космического аппарата можно судить о компоненте угловой скорости по соответствующей оси [9, 12].
Важно обратить внимание на то обстоятельство, что вращение вокруг одной оси может быть неограниченным, и поэтому недостатки, свойственные платформам в кардановых подвесах, отсутствуют [9]. Очевидно, что на борту космического аппарата надо иметь три таких одноосных гиростабилизатора с взаимно перпендикулярными осями чувствительности; образно выражаясь, для получения бескарданной базисной системы в этом случае надо «распилить» обычную гиростабилизированную платформу на три части и подсоединить их к вычислительной машине. В каком случае предпочтительно использовать датчики угловых скоростей и в каком — одноосные гиростабилизаторы – дело конкретной конструктивной проработки. Достаточно указать лишь на то, что в первом случае гироскопический элемент работает в измерительном режиме, во втором же случае – в режиме нуль-индикатора [21], что всегда проще для гироскопического элемента, хотя сам одноосный гиростабилизатор и сложнее датчика угловой скорости.
Бесплатформенные системы, использующие только набор датчиков Д1 , обладают тем же недостатком, что и некорректируемые гироплатформы, — вследствие уходов гироскопов их точность с течением времени падает. Чтобы избежать этого, к вычислительной машине подсоединяют датчики, обозначенные через Д2 на рис.2.1. Это могут быть самые различные датчики внешней информации — построители местной вертикали, астродатчики и т.п [1, 12, 15]. По их сигналам вносятся поправки в вычисления, произведенные в машине на основе информации, получаемой с датчиков группы Д1 , и тем самым достигается независимость точности измерений углов ориентации от времени непрерывной работы. В некоторых режимах можно работать, основываясь на информации об углах ориентации, получаемой только с датчиков Д2 . В этих режимах датчики Д1 могут играть роль простых датчиков угловых скоростей, если последние нужны для формирования сигналов управления. Возможны и другие комбинации использования подключенных к вычислительной машине датчиков: если, например, нужно реализовать режим орбитальной ориентации, то достаточно включить один датчик группы Д2 – построитель местной вертикали, а по сигналам датчика Д1 произвести курсовую ориентацию космического аппарата, используя их как инерциальные датчики ориентации. Количество датчиков Д2 и их состав определяются задачами, стоящими перед космическим аппаратом [9, 12, 15, 21].
Приведенные примеры показывают большую гибкость системы управления ориентацией, использующей бесплатформенную базисную систему отсчета, не только в части управления угловым положением космического аппарата по отношению к разным осям ориентации, но и в том, что один и тот же режим ориентации может быть получен путем включения различных наборов датчиков.
Гиростабилизированные платформы применяются для обеспечения режимов управления движением центра масс и стабилизации углового положения при работе маршевых двигателей или управления спутником в атмосфере. Бесплатформенная система с использованием бортовой вычислительной машины способна обеспечить и такие режимы. С этой целью к ней подключается группа датчиков, обозначенная через Д3 (см. рис.2.1), например акселерометров [9, 15]. Хотя такие акселерометры стоят неподвижно относительно корпуса космического аппарата и поэтому их оси чувствительности участвуют в поворотах вместе с корпусом, их показания для некоторого мгновения t всегда могут быть сопоставлены с углами ориентации относительно абсолютного пространства для того же t, получаемыми указанными выше способами. Это позволяет производить в машине соответствующие пересчеты и в конечном итоге путем интегрирования уравнений движения центра масс иметь все нужные данные для управления движением центра масс [1]. На рис. 2.1 связь бортовой вычислительной машины с контуром управления движением центра масс и управления угловым положением при режимах, связанных с большими силовыми воздействиями на космический аппарат, не показана.
Бортовая вычислительная машина не только не делает управление гибким и вполне заменяет гироплатформу, но способна производить обработку сигналов, поступающих с датчиков внешней информации, с целью выделения полезного сигнала из шумов [7, 22]. Таким образом, во всех отношениях, в том числе и в способности работать фильтром для сигналов, характеризуемых заметными флуктуациями, бесплатформенная система вполне заменяет корректируемые гиростабилизированные платформы [12].
Применение бесплатформенных систем имеет большие перспективы, поскольку они не обладают недостатками платформ, установленных в кардановых подвесах [9, 12, 15].
2.2 Гироскопический измеритель вектора угловой скорости
Гироскопические системы ориентации позволяют получить необходимую информацию для автоматического управления ЛА автономными методами, без каких-либо иных, не зависящих от внешних помех источников информации (локация, радионавигация, астроориентация и др.) [1, 21].
Бесплатформенные (бескарданные) системы ориентации, чувствительными элементами которых являются гироскопические датчики первичной информации, измеряющие углы или угловые скорости поворота ЛА и линейные ускорения (акселерометры и физические маятники). Эти датчики устанавливаются непосредственно на борту ЛА и работают совместно с цифровой или аналоговой вычислительной машиной, непрерывно производя расчет углов курса, крена и тангажа или иных параметров, определяющих ориентацию ЛА относительно базовой системы координат [1, 3, 9, 12].
В бесплатформенных системах ориентации и навигации гироскопы и акселерометры устанавливаются непосредственно на корпусе ЛА либо монтируются в специальные блоки чувствительных элементов. Сигналы этих датчиков поступают на вход ЭВМ, которая решает задачу ориентации аналитически, как бы, заменяя собой карданов подвес и координатный преобразователь гироплатформы.
Наибольшее распространение в бесплатформенных системах ориентации и навигации получают прецизионные датчики угловых скоростей (ДУС) и гироскопы на электростатическом подвесе, определяющие углы поворота ЛА вокруг центра его масс; также используются угловые и линейные акселерометры, установленные определенным образом на корпусе ЛА [1, 9, 21]. В отличие от систем ориентации с гироплатформами в бесплатформенных системах гироскопические датчики и акселерометры работают в более тяжелых условиях эксплуатации вследствие изменения расположения приборов по отношению к направлению гравитационного поля Земли, больших скоростей и ускорений, возникающих при вращении, колебаниях и вибрации корпуса ЛА [1].
Точность же измерения угловых скоростей, ускорений или угловых перемещений КА должна быть того же уровня, который достигнут в системах платформенного типа.
Датчики угловых скоростей – это один из основных и наиболее совершенных чувствительных элементов систем управления, стабилизации и навигации [21].
К характеристикам ДУС предъявляются очень жесткие требования. Так, верхний диапазон скоростей, измеряемых современными ДУС, соответствует десяткам и сотням градусам в секунду. Верхний диапазон входных воздействий, в котором ДУС обязан обеспечивать измерения угловой скорости, достигает 100 Гц [21].
Прецизионные ДУС бесплатформенных инерциальных систем должны иметь разрешающую способность до тысячных долей градусов в час и линейность до 10 -3 %, причем эти ДУС должны формировать выходной сигнал в цифровом виде. В широком диапазоне варьируются требования к массовым и габаритным параметрам приборов; из-за миниатюризации ДУС в последнее время значительно уменьшились величины собственного кинетического момента их гироскопов [1, 9, 12, 21].
Датчик угловой скорости (ДУС) служит для измерения угловой скорости КА от 0,001 до 10 с -1 в инерциальном пространстве. Для этой цели можно применять как двухстепенные, так и трехстепенные гироскопы. Гиротахометр (рис. 2.2) представляет собой обычно гироскоп с двумя степенями свободы и жесткой отрицательной обратной связью, которая создает противодействующий момент, пропорциональный угловому отклонению рамки от исходного положения для получения приемлемых переходных процессов применяются специальные демпферы; если гироскоп помещается в поплавок, то демпфирование осуществляется жидкостью [1, 21].
Величина момента сухого трения М0 , определяет порог чувствительности гироскопа по отношению к измеряемой скорости. В поплавковых гироскопах момент М0 пренебрежимо мал. Поэтому в установившемся режиме угол поворота рамки относительно ее оси [21]
Кпр – приведенная жесткость пружины.
ГИВУС включает в себя шесть измерителей с некомпланарным расположением осей чувствительности (измерительных осей).
Все шесть измерительных осей () при номинальном положении располагаются параллельно ребрам базового правильного шестигранника, вписанного в конус вращения с углом полураствора j, равным 0,9553 рад, и имеющего симметричное расположение ребер по кругу основания конуса с угловым шагом q, равным 1,04 рад [21].
1. В качестве приборной системы координат принимается правая ортогональная Oxп yп zп , материализованная посадочными местами на корпусе ГИВУС. Ориентация осей чувствительности ГИВУС относительно осей приборной системы координат приведена на рисунке (рис 2.3) где:
Оси чувствительности и параллельны плоскости хп Оуп . На рисунке (рис. 2.4) показаны положительные направления углов отклонения осей чувствительности измерителей относительно номинального положения, где
2. При вращении ГИВУС вокруг оси чувствительности в положительном направлении (против часовой стрелки, если смотреть с конца вектора) выходная информация с измерителя А1 (А2 , А3 , А4 , А5 , А6 ) соответствует положительному значению параметра и наоборот.
3. Относительная ориентация осей приборной системы координат и строительной системы координат изделия такова, что ось хп совпадает с отрицательным направлением оси zизд ; ось уп с положительным направлением оси хизд ; zп совпадает с отрицательным направлением оси уизд .
C гивус выходная информация в дискретном виде выдается с каждого измерителя (А1 , А2 , А3 , А4 , А5 , А6 ) в виде унитарного кода – последовательности импульсов, транслируемых в БЦВК по электрически не связанным каналам. Каждый канал информации имеет две функциональные линии связи; по одной линии выдаются импульсы, соответствующие положительной проекции, а по другой линии, соответствующие отрицательной проекции угловой скорости на ось чувствительности измерителя [1, 3, 9, 21].
Рис. 2.3 — Ориентация осей чувствительности ГИВУС относительно осей приборной системы координат
Рис.2.4 — Положительные направления углов отклонения осей чувствительности измерителей относительно номинального положения
3 МАТЕМАТИЧЕСКИЕ МОДЕЛИ
3.1 Математическая модель упругого космического аппарата
Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс (см. рис. 1.1) [1].
Если триэдр жестко связанных с телом осей Oxyz с началом координат в центре масс КА (связанная система координат — ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера, описывающая динамику вращения КА вокруг центра масс, примет вид (3.1) [1, 3]:
(3.1)
где , , – проекции вектора абсолютной угловой скорости тела на оси
Ox,Oy и Oz соответственно.
,, – проекции главного момента М на оси Ox,Oy и Oz соответственно.
, и — моменты инерции тела относительно тех же осей.
(3.2)
В приведенных выражениях (3.2) x,y,z – координаты элементарной массы тела, а интегралы берутся по всей массе твердого тела. Космическим аппаратом целесообразней управлять вокруг ССК [1, 3, 4].
Воспользуемся гироскопическим измерителем вектора угловой скорости и рассмотрим режим построения базовой ориентации с произвольными начальными условиями [1]. Командные приборы и исполнительные органы устанавливаем с учетом главных центральных осей инерции, таким образом, что управление вокруг трех взаимно перпендикулярных осей Ox, Oy, Oz — независимо.
Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости wj с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой базовой системы координат (БСК) [1, 3], начало которой совпадает с началом координат ССК, а оси определенным образом ориентированы в инерциальном пространстве и движутся поступательно.
Пусть углы ориентации (углы Эйлера-Крылова) – полностью определяют угловое положение ССК относительно БСК. Понятие углов ориентации становится однозначным лишь после того, как введена последовательность поворотов твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов: система кинематических уравнений имеет вид [1, 4, 5, 23]:
Системы (3.1) и (3.3) описывают угловое движение твердого тела относительно БСК. Будем предполагать, что углы Эйлера-Крылова jj малы. Текущие значения wj оцениваются в системе по информации измерителя угловой скорости, измеряющего интегралы от проекций вектора абсолютной угловой скорости КА на оси чувствительности прибора [21].
Известны также некоторые другие методы [1, 4, 23] описания конечного поворота твердого тела не тремя, а четырьмя параметрами: исследование параметров Родрига-Гамильтона, Кейли-Клейна, или с использованием кватернионов [1, 3, 6].
Интегрируя кинематические уравнения (3.3) в бортовой цифровой вычислительной машине (БЦВМ) при начальных значениях углов , и интегрируя уравнения движения центра масс КА при соответствующих начальных условиях, реализуют бесплатформенную инерциальную навигационную систему (БИНС). Таким образом, считаем, что текущие величины углов jj непрерывно вычисляются в БИНС [9, 12].
Характерной особенностью момента управления является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент Мупрj формируется в соответствии с логикой закона управления и обеспечивает заданное угловое положение КА [1, 8, 10].
Источником внешнего возмущающего момента Мвj , является взаимодействие КА с внешней средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного [1, 3, 10, 12]. Момент имеет две составляющих – (создаваемую реактивными двигателями), и (создаваемым моментным магнитоприводом и др. Будем рассматривать только ) [1].
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
(3.4)
получено три независимых уравнения.
Закон управления формируется путем сложения позиционного сигнала jj и скоростного сигнала wj , умноженного на коэффициент усиления kj (j=x,y,z ):
. (3.5)
Усложним рассматриваемую модель. Для этого будем рассматривать ее как упругое тело [1, 3, 6-12]. Уравнения осцилляторов для упругой модели имеет вид:
(3.6)
где — коэффициент демпфирования для каждой отдельно взятой гармоники.
— квадрат собственной частоты не демпфированных колебаний для каждой гармоники.
— управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты мы берем из таблицы, приведенной в приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной [1].
3.2 Моменты внешних сил, действующие на космический аппарат
3.2.1 Аэродинамический момент
Взаимодействие корпуса [1, 3] движущегося с большой скоростью космического аппарата с разряженной атмосферой больших высот вызывает появление аэродинамических сил и моментов. Первые приводят главным образом к постепенному торможению космического аппарата и связанного с этим эволюции его орбиты, в конечном итоге приводящей к падению на поверхность планеты ее искусственных спутников. А вторые к появлению внешних моментов, иногда благотворно, а чаще неблаготворно сказывающихся на режимах ориентации.
Особенностью аэродинамического взаимодействия корпуса космического аппарата с внешней средой [1, 3] является то, что вследствие малой плотности среды длина свободного пробега молекул атмосферы не может считаться малой по сравнению с характерными линейными размерами корпуса космического аппарата. В результате соударение «отскочившей» от поверхности космического аппарата молекулы внешней среды с другой такой молекулой происходит на большом удалении от него, что позволяет считать, что каждая молекула атмосферы взаимодействует с корпусом космического аппарата независимо от других. Это приводит не к обычной в аэродинамике схеме обтекания тела сплошной среды, а к картине «бомбардировки» такого тела отдельными молекулами.
Взаимодействие молекул разряженной среды с поверхностью твердого тела мыслимо идеализировать двояким образом: либо как упругое соударение с мгновенным зеркальным отражением молекулы, либо считать, что при соударении молекула отдает всю свою энергию телу, приходит с ним в температурное равновесие, а затем выходит во внешнее пространство с тепловой скоростью. Поскольку тепловая скорость молекулы невелика по сравнению со скоростью движения космического аппарата, последнюю схему можно считать схемой абсолютно упругого удара. Вторая из приведенных схем значительно лучше описывает наблюдаемые на практике явления и поэтому кладется в основу расчетов. Однако фактически происходят как упругие, так и неупругие соударения, и в более тонких расчетах следует учитывать долю тех и других [1, 3, 6].
Если по аналогии с обычной аэродинамикой считать, что возникающие силы взаимодействия тела и среды пропорциональны скоростному напору
; (3.7)
где — плотность внешней среды, — относительная скорость тела и среды, то элементарная сила, действующая на площадку dS , будет:
; (3.8)
здесь — некоторый коэффициент, а — угол между внешней нормалью к элементарной площадке dS и вектором скорости этой площадки относительно внешней среды. Написанное соотношение является следствием закона сохранения импульса, и легко убедиться, что для абсолютно неупругого удара с=2 .
Элементарный аэродинамический момент относительно центра масс
; (3.9)
где r — радиус-вектор площадки dS, имеющий начало в центре масс тела, а полный момент
; (3.10)
В последнем выражении интегрирование производится п о той час ти поверхности космического апп арата S, которая омывается внешней средой при его движении. Входящая в (3.8), а, следовательно, и в (3.10) скорость V , строго говоря, складывается из скорости движения центра масс и линейных скоростей элем янтарных площадок внешней поверхности корпуса космического аппарата, связанных с его вращением вокруг центра масс. Первое слагае мое , связанное с , будет, поэтому функцией конфигурации омываемой части корпуса, а, следовательно, функцией конфигурации внешней поверхности космического аппарата и его п оложения относительно вектора скорости . Второе слагаемое, кроме того, будет являться фун кцией угловой скорости космического ап парата. Сравнение модуля скорости с наибольшим возможным з начением модуля линейной скорости внешней п оверхности космического аппарата, порожденной его вращением вокруг центра масс, показывает, что вторым слагаемым в задачах активной ориен тации космических аппаратов можн о пренебрегать [1 ,3, 12]. Это связано как с очень малыми угловыми скоростями, так и с относительно небольши ми раз мерами современных космических аппаратов. Поэтому всюду будет делаться предположение о рав енстве нулю внешнего аэродинамического момента, связан ного с вращен ием косм ического аппарата вокруг его центра масс. В этой же связи скорос ть V в выра жении (3.8) может быть определена равенст вом .
Пусть космический аппарат имеет форму сферы, тогда численное значение аэродинамического момента действующего на сферу, и при будет равно
(3.11)
Полученное выражение говорит о том, что при поворотах вокруг центра масс космический аппарат сферической формы имеет два положения равновесия, соответствующие и . Если направление отсчета расположения центра давления относительно центра масс взять по направлению вектора , то первое положение равновесия характеризуется расположением центра масс за центром сферы (задняя центровка), а второе расположением центра масс перед центром сферы (передняя центровка). Рассматривая изменение аэродинамического момента в функции угла в окрестности положения равновесия, можно написать [8]:
; (3.12)
Это даст для задней центровки , а для передней . Знаки приведенных производных говорят о том, что при задней центровке космический аппарат статически неустойчив (возникающий момент имеет тот же знак, что и отклонение), а при передней центровке— устойчив.
Это указывает на основную закономерность, характерную для аэродинамических моментов, возникающих при космическом полете: возникновение моментов связано с силами сопротивления и зависит от расположения линий действия этих сил относительно центра масс. При более сложных конфигурациях космических аппаратов расчет заметно усложняется, приходится учитывать взаимное затенение элементов конструкции, переменность (зависимость от угла поворота) омываемой потоком поверхности S и т.п. Однако и в этих громоздких расчетах фактически сохраняется приведенная методика. Результаты подобных расчетов, как правило, представляются в виде зависимостей аэродинамических коэффициентов моментов от соответствующих углов, характеризующих положение тела относительно вектора скорости центра масс [1, 3, 8].
Формула (3.12) указывает на зависимость аэродинамического момента от положения центра масс на прямой ОА. В условиях невозмущенного движения внешние моменты должны быть полностью уравновешены. В рассматриваемом случае это означает, что угол должен быть равен нулю, т. е. линия ОА должна быть параллельной вектору скорости. Если считать, что происходит ориентация в скоростных осях, то естественно направить ось Ох космического аппарата по прямой OA , тогда при идеальной ориентации жестко связанная с корпусом космического аппарата ось Ох будет совпадать по направлен ию с вектором , и вследс твие равенства нулю угла аэродин амический момент будет равен нулю [1. 3].
Таким образом, вопрос о ве личине аэродинамичес кого момента и статической устойчивости оказывается связанным с расстоянием взятым на оси Ох от центра масс до точки А . Точку приложения равнодействующей аэродинамических сил называют центром давления , и, следовательно, вектор определяет положение центра давления относительно центра масс. Для тела произвольной формы тоже можно ввести понятие центра давления как точки пересечения линий действия равнодействующих аэродинамических сил.
Как уже говорилось, аэродинамические силы и моменты пропорциональны скоростному напору q (3.7). Поскольку скорость полета определяется законами небесной механики, постольку при изменении высоты полета на малую долю радиуса планеты скорость изменяется мало. В то же время известно, что плотность окружающей планету атмосферы чрезвычайно сильно зависит от высоты. Это позволяет утверждать, что величина q является для данного класса космических аппаратов (например, для искусственных спутников Земли, движущихся по почти круговым орбитам) главным образом функцией плотности среды , т.е. в конечном итоге — высоты полета. Следовательно, для космических аппаратов, траектории которых достаточно удалены от планет, аэродинамические моменты будут пренебрежимо малы [1, 3, 10].
Для математического моделирования, будем рассматривать модель реального космического аппарата [10], с заданными линейными размерами.
Солнечные батареи Корпус КА
Исходя из выше представленной модели космического аппарата, аэродинамические моменты в каждом из каналов, можно представить в виде:
Предполагается, что рассматриваемая модель упругого космического аппарата [1, 3, 10, 11] движется в атмосфере земли. Тогда на КА действуют моменты внешних сил, такие как гравитационный и аэродинамический моменты. Для нахождения аэродинамического момента, необходимо знать плотность атмосферы, которая зависит от высоты полета.
В данной задаче требуется [11, 24] аппроксимировать функцию полиномом 3-его порядка вида:
; (3.14)
Полином (3.14) в каждом из узлов аппроксимации должен удовлетворять условию:
; (3.15)
Таким образом, задача аппроксимации функции сводится к решению системы с N+1 уравнений с тремя неизвестными:
; (3.16)
Это объясняется тем, что полином должен пройти через все N+1 точек (в данном случае это 25 точек) в которых задана функция x = x(t).
Метод наименьших квадратов позволяет такую систему привести к решаемой системе. Запишем функционал:
.
Это достигается тогда, когда выполняется:
;
Взяв соответствующие производные, получим систему:
;
В отличии от системы (3.16) полученная система определена и имеет единственное решение [24].
В результате проведенных расчетов, для составления системы, были произведены расчеты, приводить которые нецелесообразно ввиду их громоздкости.
Подставив в систему (3.17) соответствующие значения, в результате мы получим систему. Эту систему будем решать методом Гаусса.
3.2.1.2 Построение аппроксимирующего полинома для плотности земной атмосферы
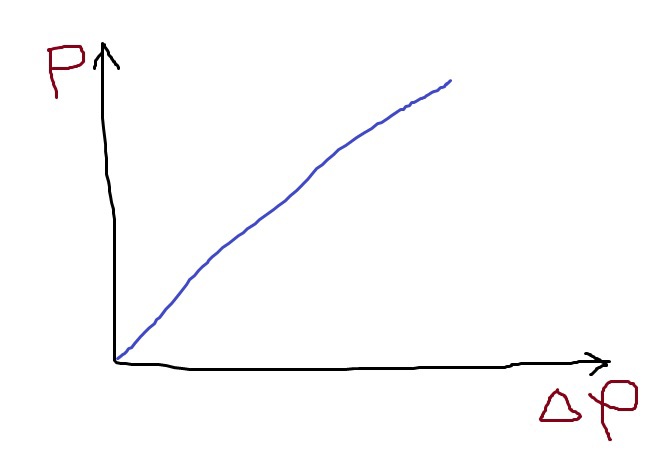
Воспользовавшись таблицей стандартной атмосферы [10,11], построим графики зависимостей от высоты функции Po(H):
Рис. 3.3 — Зависимость плотности воздуха от высоты
3.2.2 Гравитационный момент
В обычных задачах механики [1, 3, 6, 10, 11, 12], связанных с ее техническими приложениями, ускорения силы тяжести в различных точках материального тела считаются равными как по величине, так и по направлению. Это сразу приводит к известному положению о совпадении центра масс и центра тяжести материального тела и, как следствие, к равенству нулю момента гравитационных сил относительно центра масс. На самом деле векторы ускорения силы тяжести различных точках тела всегда различны, вследствие того, что все они направлены к центру Земли, а, следовательно, если рассматриваемые точки не лежат на одной прямой, проходящей через центр притяжения, то векторы параллельны, а если точки лежат на одной такой прямой, то – имеют различное удаление от центра притяжения и, значит, соответствующие ускорения отличаются по величине. Однако это уточнение в обычных задачах механики несущественно, поскольку размеры технических сооружений малы по сравнению с радиусом Земли, и поэтому вызванные сформулированным здесь уточненные моменты столь малы по сравнению с другими, что учет их не смысла.
Космический аппарат, движущийся по околоземной орбите [6], тоже мал по сравнению с расстоянием до центра притяжения планеты, однако он не подвержен (если не считать времени включения двигателей) действию больших внешних моментов, и поэтому пренебрежение малыми в обычной технике моментами (гравитационными, связанными со световым давлением и т. п.) уже не будет законным без соответствующей оценки этих моментов [1, 3].
Прежде, чем получить формулы для вычисления гравитационных моментов и обсудить некоторые следствия, вызванные существованием этих внешних моментов, поясним физическую сущность рассматриваемого явления па простейшем примере. Пусть в центральном ньютоновом поле сил находится тело, могущее быть представленным в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель), и пусть этот стержень будет наклонен на некоторый угол (отличный от 0 и pi/2) к линии, соединяющей его середину А с центром притяжения С (рис. 3.4).
Рис. 3.4 – Тело в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель) в ньютоновом поле
Если принять обычные допущения о параллельности и равенстве сил тяжести) действующих на обе массы гантели (считаем, что на них действует ускорение силы тяжести, соответствующее точке А), то связанные с ними силы G не дали бы момента относительно точки А, являющейся центром масс рассматриваемого тела. На самом деле силы тяжести будут действовать по прямым В1С и В2С, а величина силы тяжести в точке И1 будет меньше, чем в точке И2, поскольку В1С > В2С. Поэтому к “обычным” силам G, вычисленным по вектору ускорения силы тяжести, соответствующему точке А, следует ввести поправки, например малые силы P1i и P2, изменяющие должным образом величины сил тяжести, действующий на материальные точки, и силы P1 и Р2, изменяющие должным образом направления этих сил тяжести. Из рисунка видно, что пара сил R1 и R2 и пара сил P1 и Р2 (их можно считать ‘парами, постольку малые силы Р1 и Р2, а также R1 и R2 будут отличаться друг от друга на .величины высшего порядка малости) создают моменты одного знака, стремящиеся совместить ось тела B1B2 с исправлением АС.
Таким образом, как зависимость величины ускорения силы тяжести от расстояния до центра притяжения, так и центральность поля тяготения приводят к эффектам одного типа — к появлению моментов, стремящихся повернуть ось тела, связанную с геометрией распределения масс в нем, в некоторое определенное положение относительно прямой, соединяющей центр масс тела с центром притяжения.
Найдем выражения, позволяющие вычислять составляющие вектора гравитационного момента Мгр, действующего на некоторое тело S [1, 3]. Введем связанную с телом правую систему координат ОXоYоZo с ортами i, j, k и началом в центре масс тела О, которая совпадает с орбитальной. Соответственно ось OYo натравим по продолжению радиуса-вектора, соединяющего центр притяжения С с началом О, а ось ОXo расположим в мгновенной орбитальной плоскости. Гравитационный момент, действующий на тело S, будет равен:
;
где p — радиус-вектор некоторой элементарной массы материального тела,
dG-вектор силы тяжести, действующей на эту элементарную массу. Очевидно, что
.
Здесь g — ускорение силы тяжести на поверхности планеты, r – радиус-вектор элементарной массы dm относительно центра тяготения С, гg -удаление поверхности планеты от центра C. Введя еще r0 — радиус-вектор центра масс тела S относительно С, следовательно [3]:
;
где — гравитационная постоянная для рассматриваемой планеты, равная .
Проекции гравитационного момента на оси триэдра ОXoYoZo, будут равны:
; (3.18)
где D и F-центробежные моменты инерции тела S, определяемые для системы
Полученные для гравитационного момента выражения говорят о том, что вектор этого момента всегда лежит в плоскости местного горизонта (перпендикулярен к местной вертикали СО) [1, 4, 10]. Кроме того, очевидно, что гравитационный момент для тела, главные центральные оси инерции которого в данное мгновение совпадают с орбитальными, равен нулю (так как в этом случае D=F=0), в частности он всегда равен нулю для тела, эллипсоид инерции которого является сферой.
В общем случае главные центральные оси инерции тела могут быть повернуты произвольным образом относительно орбитальных осей ориентации. Обозначим жестко связанный с телом S триэдр, совпадающий с главными центральными осями инерции, через Охуz, а для орбитальных осей сохраним обозначение OXoYoZo. Взаимное положение этих систем координат определим следующей таблицей направляющих косинусов:
.
Найдем проекцию гравитационного момента на ось Ох. Очевидно, что
поскольку триэдр Oxyz совпадает с главными центральными осями инерции, постольку все центробежные моменты инерции в этих осях будут равны нулю, и выражение (3.20) может быть упрощено [1, 3]. Проделав аналогичные выкладки для нахождения проекций гравитационного момента можно, написать:
(3.21)
Таким образом, гравитационный момент, действующий вокруг одной из осей триэдра Oxyz, зависит от разности моментов инерции относительно двух других осей. Чтобы сделать анализ полученных выражений более наглядным, рассмотрим гравитационный момент, действующий на тело S, при условии, что оси 0Z и 0Zo совпадают. Это соответствует повороту тела S, который можно назвать поворотом по тангажу, на угол (рис. 3.6).
Рис. 3.6 — Поворот тела вокруг оси Z
При сделанных предположениях
, ;
;
Как и надо было ожидать, при гравитационный момент обращается в нуль, поскольку триэдры Охуz и 0XoYoZo в этом случае совпадают [1, 3]. При монотонном увеличении от гравитационный момент возрастает, достигает максимума при , затем убывает и вновь становится равным нулю при . Таким образом, существует два положения равновесия: при и при . Однако, из этих положений одно соответствует статической устойчивости (при малом изменении , возникает момент противоположного знака), другое – статистической неустойчивости. Действительно, производная
;
при и при имеет разные знаки. Какое из этих двух положений соответствует статистической устойчивости, зависит от знака (B-A) [1, 3, 8]. Условие устойчивости (возникновение восстанавливающего момента при малом отклонении) реализуется при для A>B или при для B>A, т.е. в обоих случаях вытянутая ось тела должна занимать вертикальное положение.
Таким образом, вытянутое в вертикальном положении тело, обладая статистической устойчивостью по тангажу и крену, является нейтральным по отношению к углу рыскания [1, 3, 4].
3.3 Гироскопический измеритель угловой скорости
Для пересчета векторов сил, моментов и т.д. из одной системы координат в другую необходимо вычислить матрицу перехода, элементами которой являются косинусы углов между осями исходной и повернутой систем координат [1, 3, 21]. Эта матрица определяется последовательностью углов поворота, которые позволяют перейти от одной системы координат к другой. Осуществление такого рода перехода требует не более трех поворотов исходной системы координат. Выбор последовательности углов поворота обычно определяется физическим содержанием задачи [1, 3, 5]. Это могут быть углы, измеренные с помощью приборов системы управления, от которых зависят аэродинамические и другие нагрузки на ЛА и т.д. [1]
Применение направляющих косинусов в космических приложениях обусловлено, прежде всего, тем, что они могут быть непосредственно измерены на борту космического аппарата [5].
1. Сформируем матрицу dA [3,3] – переход от ССК к ПСК ГИВУС:

 (1.1)
(1.1) – полностью определяют угловое положение ССК относительно БСК [1, 4]. Понятие углов ориентации [2] становится однозначным лишь после того, как введена последовательность поворотов [3, 4, 5, 6] твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:
– полностью определяют угловое положение ССК относительно БСК [1, 4]. Понятие углов ориентации [2] становится однозначным лишь после того, как введена последовательность поворотов [3, 4, 5, 6] твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:  система кинематических уравнений имеет вид (1.2):
система кинематических уравнений имеет вид (1.2):
 (1.3)
(1.3) — коэффициент демпфирования для каждой отдельно взятой гармоники;
— коэффициент демпфирования для каждой отдельно взятой гармоники; — квадрат собственной частоты недемпфированных колебаний для каждой гармоники;
— квадрат собственной частоты недемпфированных колебаний для каждой гармоники; — управляющий момент с учетом возможного отказа;
— управляющий момент с учетом возможного отказа;

 . В таком случае компонента p’ угловой скорости вращения платформы по направлению Ox относительно абсолютного пространства будет равна
. В таком случае компонента p’ угловой скорости вращения платформы по направлению Ox относительно абсолютного пространства будет равна  . Если интегрирующий гироскоп и следящая система работают идеально, то
. Если интегрирующий гироскоп и следящая система работают идеально, то  и ,следовательно,
и ,следовательно,  , т.е. по темпу поворота платформы одноосного гиростабилизатора относительно корпуса космического аппарата можно судить о компоненте угловой скорости по соответствующей оси [9, 12].
, т.е. по темпу поворота платформы одноосного гиростабилизатора относительно корпуса космического аппарата можно судить о компоненте угловой скорости по соответствующей оси [9, 12].

 ) при номинальном положении располагаются параллельно ребрам базового правильного шестигранника, вписанного в конус вращения с углом полураствора j, равным 0,9553 рад, и имеющего симметричное расположение ребер по кругу основания конуса с угловым шагом q, равным 1,04 рад [21].
) при номинальном положении располагаются параллельно ребрам базового правильного шестигранника, вписанного в конус вращения с углом полураствора j, равным 0,9553 рад, и имеющего симметричное расположение ребер по кругу основания конуса с угловым шагом q, равным 1,04 рад [21]. – положительные направления осей чувствительности ГИВУС (измерителей А1 , А2 , А3 , А4 , А5 , А6 соответственно).
– положительные направления осей чувствительности ГИВУС (измерителей А1 , А2 , А3 , А4 , А5 , А6 соответственно). и
и  параллельны плоскости хп Оуп . На рисунке (рис. 2.4) показаны положительные направления углов отклонения осей чувствительности измерителей относительно номинального положения, где
параллельны плоскости хп Оуп . На рисунке (рис. 2.4) показаны положительные направления углов отклонения осей чувствительности измерителей относительно номинального положения, где – номинальные положения осей чувствительности измерителей А1 , А2 , А3 , А4 , А5 , А6 соответственно;
– номинальные положения осей чувствительности измерителей А1 , А2 , А3 , А4 , А5 , А6 соответственно; в положительном направлении (против часовой стрелки, если смотреть с конца вектора) выходная информация с измерителя А1 (А2 , А3 , А4 , А5 , А6 ) соответствует положительному значению параметра и наоборот.
в положительном направлении (против часовой стрелки, если смотреть с конца вектора) выходная информация с измерителя А1 (А2 , А3 , А4 , А5 , А6 ) соответствует положительному значению параметра и наоборот.

 (3.1)
(3.1) ,
,  ,
,  – проекции вектора абсолютной угловой скорости тела на оси
– проекции вектора абсолютной угловой скорости тела на оси ,
, ,
,  – проекции главного момента М на оси Ox,Oy и Oz соответственно.
– проекции главного момента М на оси Ox,Oy и Oz соответственно. ,
,  и
и  — моменты инерции тела относительно тех же осей.
— моменты инерции тела относительно тех же осей.
 (3.2)
(3.2)
 – полностью определяют угловое положение ССК относительно БСК. Понятие углов ориентации становится однозначным лишь после того, как введена последовательность поворотов твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:
– полностью определяют угловое положение ССК относительно БСК. Понятие углов ориентации становится однозначным лишь после того, как введена последовательность поворотов твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:  система кинематических уравнений имеет вид [1, 4, 5, 23]:
система кинематических уравнений имеет вид [1, 4, 5, 23]:
 , и интегрируя уравнения движения центра масс КА при соответствующих начальных условиях, реализуют бесплатформенную инерциальную навигационную систему (БИНС). Таким образом, считаем, что текущие величины углов j j непрерывно вычисляются в БИНС [9, 12].
, и интегрируя уравнения движения центра масс КА при соответствующих начальных условиях, реализуют бесплатформенную инерциальную навигационную систему (БИНС). Таким образом, считаем, что текущие величины углов j j непрерывно вычисляются в БИНС [9, 12]. является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент Мупрj формируется в соответствии с логикой закона управления и обеспечивает заданное угловое положение КА [1, 8, 10].
является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент Мупрj формируется в соответствии с логикой закона управления и обеспечивает заданное угловое положение КА [1, 8, 10]. имеет две составляющих –
имеет две составляющих –  (создаваемую реактивными двигателями), и
(создаваемую реактивными двигателями), и  (создаваемым моментным магнитоприводом и др. Будем рассматривать только
(создаваемым моментным магнитоприводом и др. Будем рассматривать только  ) [1].
) [1]. (3.4)
(3.4) . (3.5)
. (3.5) (3.6)
(3.6) — коэффициент демпфирования для каждой отдельно взятой гармоники.
— коэффициент демпфирования для каждой отдельно взятой гармоники. — квадрат собственной частоты не демпфированных колебаний для каждой гармоники.
— квадрат собственной частоты не демпфированных колебаний для каждой гармоники. — управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты
— управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты 

 мы берем из таблицы, приведенной в приложении А.
мы берем из таблицы, приведенной в приложении А. ; (3.7)
; (3.7) — плотность внешней среды,
— плотность внешней среды,  — относительная скорость тела и среды, то элементарная сила, действующая на площадку dS , будет:
— относительная скорость тела и среды, то элементарная сила, действующая на площадку dS , будет: ; (3.8)
; (3.8) — некоторый коэффициент, а
— некоторый коэффициент, а  — угол между внешней нормалью к элементарной площадке dS и вектором скорости этой площадки относительно внешней среды. Написанное соотношение является следствием закона сохранения импульса, и легко убедиться, что для абсолютно неупругого удара с=2 .
— угол между внешней нормалью к элементарной площадке dS и вектором скорости этой площадки относительно внешней среды. Написанное соотношение является следствием закона сохранения импульса, и легко убедиться, что для абсолютно неупругого удара с=2 . ; (3.9)
; (3.9) ; (3.10)
; (3.10) и линейных скоростей элем янтарных площадок внешней поверхности корпуса космического аппарата, связанных с его вращением вокруг центра масс. Первое слагае мое
и линейных скоростей элем янтарных площадок внешней поверхности корпуса космического аппарата, связанных с его вращением вокруг центра масс. Первое слагае мое  , связанное с
, связанное с  , будет, поэтому функцией конфигурации омываемой части корпуса, а, следовательно, функцией конфигурации внешней поверхности космического аппарата и его п оложения относительно вектора скорости
, будет, поэтому функцией конфигурации омываемой части корпуса, а, следовательно, функцией конфигурации внешней поверхности космического аппарата и его п оложения относительно вектора скорости  с наибольшим возможным з начением модуля линейной скорости внешней п оверхности космического аппарата, порожденной его вращением вокруг центра масс, показывает, что вторым слагаемым в задачах активной ориен тации космических аппаратов можн о пренебрегать [1 ,3, 12]. Это связано как с очень малыми угловыми скоростями, так и с относительно небольши ми раз мерами современных космических аппаратов. Поэтому всюду будет делаться предположение о рав енстве нулю внешнего аэродинамического момента, связан ного с вращен ием косм ического аппарата вокруг его центра масс. В этой же связи скорос ть V в выра жении (3.8) может быть определена равенст вом
с наибольшим возможным з начением модуля линейной скорости внешней п оверхности космического аппарата, порожденной его вращением вокруг центра масс, показывает, что вторым слагаемым в задачах активной ориен тации космических аппаратов можн о пренебрегать [1 ,3, 12]. Это связано как с очень малыми угловыми скоростями, так и с относительно небольши ми раз мерами современных космических аппаратов. Поэтому всюду будет делаться предположение о рав енстве нулю внешнего аэродинамического момента, связан ного с вращен ием косм ического аппарата вокруг его центра масс. В этой же связи скорос ть V в выра жении (3.8) может быть определена равенст вом  .
. Пусть космический аппарат имеет форму сферы, тогда численное значение аэродинамического момента действующего на сферу, и при
Пусть космический аппарат имеет форму сферы, тогда численное значение аэродинамического момента действующего на сферу, и при  будет равно
будет равно (3.11)
(3.11) и
и  . Если направление отсчета расположения центра давления относительно центра масс взять по направлению вектора
. Если направление отсчета расположения центра давления относительно центра масс взять по направлению вектора  , то первое положение равновесия характеризуется расположением центра масс за центром сферы (задняя центровка), а второе расположением центра масс перед центром сферы (передняя центровка). Рассматривая изменение аэродинамического момента в функции угла
, то первое положение равновесия характеризуется расположением центра масс за центром сферы (задняя центровка), а второе расположением центра масс перед центром сферы (передняя центровка). Рассматривая изменение аэродинамического момента в функции угла  в окрестности положения равновесия, можно написать [8]:
в окрестности положения равновесия, можно написать [8]: ; (3.12)
; (3.12) , а для передней
, а для передней  . Знаки приведенных производных говорят о том, что при задней центровке
. Знаки приведенных производных говорят о том, что при задней центровке  космический аппарат статически неустойчив (возникающий момент имеет тот же знак, что и отклонение), а при передней центровке
космический аппарат статически неустойчив (возникающий момент имеет тот же знак, что и отклонение), а при передней центровке — устойчив.
— устойчив. должен быть равен нулю, т. е. линия ОА должна быть параллельной вектору скорости. Если считать, что происходит ориентация в скоростных осях, то естественно направить ось Ох космического аппарата по прямой OA , тогда при идеальной ориентации жестко связанная с корпусом космического аппарата ось Ох будет совпадать по направлен ию с вектором
должен быть равен нулю, т. е. линия ОА должна быть параллельной вектору скорости. Если считать, что происходит ориентация в скоростных осях, то естественно направить ось Ох космического аппарата по прямой OA , тогда при идеальной ориентации жестко связанная с корпусом космического аппарата ось Ох будет совпадать по направлен ию с вектором  взятым на оси Ох от центра масс до точки А . Точку приложения равнодействующей аэродинамических сил называют центром давления , и, следовательно, вектор
взятым на оси Ох от центра масс до точки А . Точку приложения равнодействующей аэродинамических сил называют центром давления , и, следовательно, вектор  , т.е. в конечном итоге — высоты полета. Следовательно, для космических аппаратов, траектории которых достаточно удалены от планет, аэродинамические моменты будут пренебрежимо малы [1, 3, 10].
, т.е. в конечном итоге — высоты полета. Следовательно, для космических аппаратов, траектории которых достаточно удалены от планет, аэродинамические моменты будут пренебрежимо малы [1, 3, 10].
 Солнечные батареи Корпус КА
Солнечные батареи Корпус КА

 (3.13).
(3.13).
 ; (3.14)
; (3.14) ; (3.15)
; (3.15) ; (3.16)
; (3.16) .
. ;
; ;
;



 ;
; .
. ;
; — гравитационная постоянная для рассматриваемой планеты, равная
— гравитационная постоянная для рассматриваемой планеты, равная  .
. ; (3.18)
; (3.18) .
. . (3.19)
. (3.19) ; (3.20)
; (3.20) (3.21)
(3.21) (рис. 3.6).
(рис. 3.6).
 ,
, 
 ;
;

 ;
; гравитационный момент обращается в нуль, поскольку триэдры Охуz и 0XoYoZo в этом случае совпадают [1, 3]. При монотонном увеличении
гравитационный момент обращается в нуль, поскольку триэдры Охуz и 0XoYoZo в этом случае совпадают [1, 3]. При монотонном увеличении  от
от  , затем убывает и вновь становится равным нулю при
, затем убывает и вновь становится равным нулю при  . Таким образом, существует два положения равновесия: при
. Таким образом, существует два положения равновесия: при  и при
и при  . Однако, из этих положений одно соответствует статической устойчивости (при малом изменении
. Однако, из этих положений одно соответствует статической устойчивости (при малом изменении  ;
; и при
и при  реализуется при
реализуется при  для A>B или при
для A>B или при