ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ САМОЛЕТА
В случае анализа динамики самолета, совершающего полет со скоростью, значительно меньшей орбитальной, уравнения движения по сравнению с общшм случаем полета летательного аппарата [13] могут быть упрощены, в частности, можно пренебречь вращением и сферичностью Земли. Кроме этого сделаем еще ряд упрощающих допущений.
Будем считать, что самолет представляет собой абсолютно жесткое тело. Влияние упругости конструкции будем учитывать
только квазистатически, для текущего значения скоростного напора.
Будем считать, что масса и моменты инерции самолета на рассматриваемых интервалах времени неизменны и соответствуют исходному состоянию равновесного полета.
Будем считать, что конфигурация самолета имеет плоскость симметрии и что массы распределены симметрично по отношению к этой плоскости.
При анализе устойчивости и управляемости самолета будем использовать следующие прямоугольные правые системы осей координат.
Нормальная земная система координат OXgYgZg. Эта система осей координат имеет неизменную ориентацию относительно Земли. Начало координат совпадает с центром масс (ЦМ) самолета. Оси 0Xg и 0Zg лежат в горизонтальной плоскости. Их ориентация может быть принята произвольно, в зависимости от целей решаемой задачи. При решении навигационных задач ось 0Xg часто направляют к Северу параллельно касательной к меридиану, а ось 0Zg направляют на Восток. Для анализа устойчивости и управляемости самолета удобно принять направление ориентации оси 0Xg совпадающим по направлению с проекцией вектора скорости на горизонтальную плоскость в начальный момент времени исследования движения. Во всех случаях ось 0Yg направлена вверх по местной вертикали, а ось 0Zg лежит в горизонтальной плоскости и образует вместе с осями OXg и 0Yg правую систему осей координат (рис. 1.1). Плоскость XgOYg называют местной вертикальной плоскостью.
Связанная система координат OXYZ. Начало координат расположено в центре масс самолета. Ось ОХ лежит в плоскости симметрии и направлена вдоль линии хорд крыла (либо параллельно какому-либо другому, фиксированному относительно самолета направлению) к носовой части самолета. Ось 0Y лежит в плоскости симметрии самолета и направлена вверх (при горизонтальном полете), ось 0Z дополняет систему до правой.
Углом атаки а называется угол между продольной осью самолета и проекцией воздушной скорости на плоскость OXY. Угол положителен, если проекция воздушной скорости самолета на ось 0Y отрицательна.
Углом скольжения р называется угол между воздушной скоростью самолета и плоскостью OXY связанной системы координат. Угол положителен, если проекция воздушной скорости на поперечную ось положительна.
Положение связанной системы осей координат OXYZ относительно нормальной земной системы координат OXeYgZg может быть полностью определено тремя углами: ф, #, у, называемыми углами. Эйлера. Последовательно поворачивая связанную систему
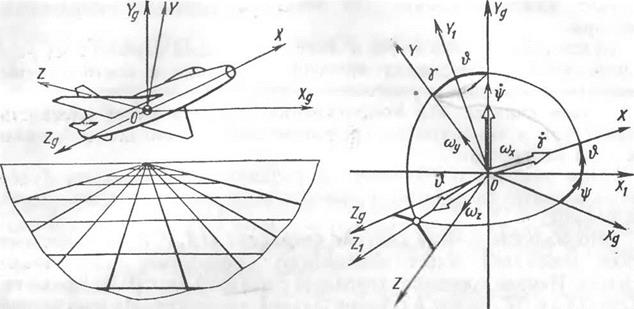
Рис. 1.L Нормальная земная OXgYgZg и связанная OXYZ системы координат Рис, 1.2, Углы Эйлера, используемые при исследовании динамики самолетов
координат на каждый из углов Эйлера, можно прийти к любому угловому положению связанной системы относительно осей нормальной системы координат.
При исследовании динамики самолетов используются следующие понятия углов Эйлера.
Угол рыскания г]) — угол между некоторым исходным направлением (например, осью 0Xg нормальной системы координат) и проекцией связанной оси самолета на горизонтальную плоскость. Угол положителен, если ось ОХ совмещается с проекцией продольной оси на горизонтальную плоскость поворотом вокруг оси OYg по часовой стрелке.
Угол тангажа # — угол между продольно# осью самолета ОХ и местной горизонтальной плоскостью OXgZg, Угол положителен, если продольная ось находится выше горизонта.
Угол крена у — угол между местной вертикальной плоскостью, проходящей через ось ОХ у и связанной осью 0Y самолета. Угол положителен, если ось О К самолета совмещается с местной вертикальной плоскостью поворотом вокруг оси ОХ по часовой стрелке. Углы Эйлера могут быть получены последовательными поворотами связанных осей относительно нормальных осей. Будем считать, что нормальная и связанная системы координат в начале совмещены. Первый поворот системы связанных осей произведем относительно оси О на угол рыскания г]; (ф совпадает с осью OYgXрис. 1.2)); второй поворот —относительно оси 0ZX на угол Ф (‘& совпадает с осью OZJ и, наконец, третий поворот произведем относительно оси ОХ на угол у (у совпадает с осью ОХ). Проектируя векторы ф, Ф, у, являющиеся составляющими
вектора угловой скорости движения самолета относительно нормальной системы координат, на связанные оси, получим уравнения связи между углами Эйлера и угловыми скоростями вращения связанных осей:
со2 = ф cos у — ф cos Ф sin у.
При выводе уравнений движения центра масс самолета необходимо рассматривать векторное уравнение изменения количества движения
где ю — вектор скорости вращения связанных с самолетом осей;
R — главный вектор внешних сил, в общем случае аэродинами-
ческих сил и тяги; G — вектор гравитационных сил.
Из уравнения (1.2) получим систему уравнений движения ЦМ самолета в проекциях на связанные оси:
°ixVz) = Ry + G!!’ (1 -3)
т iy’dt “Ь У — = Rz + Gz>
где Vx, Vy, Vz — проекции скорости V; Rx, Rz — проекции
результирующих сил (аэродинамических сил и тяги); Gxi Gyy Gz — проекции силы тяжести на связанные оси.
Проекции силы тяжести на связанные оси определяются с использованием направляющих косинусов (табл. 1.1) и имеют вид:
Gy = — G cos ft cos у; (1.4)
GZ = G cos d sin y.
При полете в атмосфере, неподвижной относительно Земли, проекции скорости полета связаны с углами атаки и скольжения и величиной скорости (V) соотношениями
Vх = V cos a cos р;
 Vу = — V sin a cos р;
Vу = — V sin a cos р;
Принципы осуществления управляемого полета.
Лекция 4
ПРИНЦИПЫ ОСУЩЕСТВЛЕНИЯ УПРАВЛЯЕМОГО ПОЛЕТА.
1. Уравнение движения ЛА в скоростной системе координат.
2. Маневренные свойства ЛА.
3. Способы создания управляющих сил и моментов
3.1 Газодинамические органы управления.
3.2 Аэродинамические органы управления.
ПРИНЦИПЫ ОСУЩЕСТВЛЕНИЯ УПРАВЛЯЕМОГО ПОЛЕТА.
1. Уравнение движения ЛА в скоростной системе координат.
2. Маневренные свойства ЛА.
3. Способы создания управляющих сил и моментов
3.1 Газодинамические органы управления.
3.2 Аэродинамические органы управления.
1. УРАВНЕНИЕ ДВИЖЕНИЯ ЛА В СКОРОСТНОЙ СИСТЕМЕ КООРДИНАТ.
Скоростная система координат позволяет анализировать силы и моменты, действующие на аппарат. Начало координат располагается в центре масс аппарата, ось ОХ совпадает с вектором скорости, ось ОY – перпендикулярна оси ОX и лежит в плоскости симметрии аппарата, ось OZ перпендикулярна плоскости ХОY и направлена таким образом, чтобы образовалась правая система координат.
Положение аппарата в этой системе координат характеризуется тремя углами:
1) углом атаки между продольной осью ОХ и проекцией вектора скорости ЛА на плоскость ОХY связанной системы координат;
2) углом скольжения между вектором скорости ЛА и плоскостью ОХY связанной системы координат;
3) углом крена между поперечной осью ОZ и осью OZg и нормальной системы координат, смещенной в положение, при котором угол рыскания равен нулю.
Рис. 1. К составлению уравнений движения ЛА
Общее движение аппарата упрощенно представляют в виде суммы двух слагаемых: движения центра масс ЛА и вращения вокруг его центра масс.
Для упрощения исследования движения ЛА рассмотрим его полет в вертикальной (рис. 1) плоскости.
На ЛА действуют аэродинамическая подъемная сила Ry; сила лобового сопротивления Rx, Р – тяга двигателя; mg – сила тяжести и аэродинамический момент Мz. Уравнения движения можно разбить на две группы: динамические и кинематические.
Динамические уравнения
( 1 )
где Iz, z – момент инерции и угловая скорость ЛА относительно оси ОZa; – угол наклона траектории; – угол атаки; m – масса аппарата, которая в общем случае изменяется по формуле:
( 2 )
где m0 – начальная масса; Iу – удельный импульс тяги; – полное время работы двигателя.
Два первых уравнения (1) устанавливают связь между силами, действующими на аппарат, и линейными ускорениями его движения: dV/dt – касательное, Vd/dt – нормальное ускорение (действительно, , где *– радиус кривизны траектории) и применяются при исследовании маневренных свойств ЛА.
Значение силы тяжести mg зависит от скорости и высоты полета аппарата. Для ЛА небольшой дальности, высоты и скорости влияние кривизны Земли на уравнение движения будет незначительным и его можно не учитывать, чего нельзя делать для баллистических и межконтинентальных ЛА, так как это может дать большие погрешности в расчетах.
Проанализируем влияние этих факторов.
Угловая скорость линии местного горизонта (рис. 2) определяется из уравнения:
( 3 )
Пропорционально AB на аппарат будет действовать центробежная сила, уменьшающая силу тяжести, т.е. в первых двух уравнениях системы (2.1) следует использовать:
( 4 )
где g0 – ускорение свободного падения на поверхности Земли.
Кинематические уравнения:
( 5 )
характеризуют траектории движения центра масс ЛА в земной системе ко-ординат.
Рис. 2. Влияние высоты полета ЛА на ускорение свободного падения.
2. МАНЕВРЕННЫЕ СВОЙСТВА ЛА.
При оценке эффективности ЛА его важным свойством является маневренность, которая определяется быстротой изменения вектора скорости. Очевидно, что для изменения величины и направления скорости полета необходимо иметь возможность изменить величину и направление равнодействующей всех сил. При рассмотрении уравнений сил в вертикальной плоскости получим Rx, Ry:
Nx=P+ Ry + Rx ( 6 )
проекции которой на оси Xa и Ya:
Nx=P cos- Rx;
Ny=P sin+ Ry.
Nx – управляющая касательная сила служит для изменения абсолютного значения вектора скорости: при Nx > mg sin скорость возрастает, при Nx = mg sin скорость постоянная, при Nx mg имеет место восходящая криволинейная траектория, при Ny = mg – прямолинейная, при Ny . Соответственно по величине нормальной перегрузки можно судить о характере траектории: nya cos вогнутость направлена вверх.
Аналогично можно сделать выводы и по другим случаям полета. Так, при полете в горизонтальной плоскости nya = 1, при горизонтальном прямолинейном равномерном полете nxa = 0, nya = 1, nza = 0.
При анализе движения ЛА различают два вида перегрузок: потребные и располагаемые.
Если известны все геометрические элементы траектории, то по формулам (12) можно определить перегрузки, которые должен иметь ЛА при движении по этой траектории. Эти перегрузки получили название потребных.
С другой стороны, ЛА при максимальном (предельно допустимом) отклонении органов управления в режиме балансировки может создавать перегрузки, которые получили название располагаемых. Эти перегрузки характеризуют маневренность аппарата, т. е. его способность создавать управляющие силы.
Очевидно, что для осуществления полета по требуемой траектории ЛА должен иметь располагаемые перегрузки, по крайней мере, не меньше потребных. В реальных условиях на ЛА действуют различные случайные факторы, обусловленные разбросом параметров атмосферы и ее турбулентностью, кро-ме того, геометрические параметры корпуса, крыльев, органов управления реализуются с определенной вероятностью при изготовлении. Это приводит к тому, что необходим определенный запас по перегрузке, т. е.
nрасп . (13)
в каждой точке траектории полета (рис. 3).
Рис. 3. Траектория движения ЛА:
1 – действительная; 2 – кинематическая
Продолжим анализ управляемого полета ЛА. Полет может быть установившимся (режим балансировки) и переходным (режим маневра) . При установившемся полете (с постоянной скоростью, на постоянной высоте, с постоянным углом атаки и т. д.) моменты тангажа, рысканья и крена равны нулю, и ЛА (как принято говорить) находится в режиме балансировки. Для продольной балансировки
mz + mz=0, (14)
где mz , mz – производные момента по углу атаки и углу отклонения ру-лей.
Для оценки балансировки обычно вводится понятие «статическая устойчивость ЛА», которое характеризует способность ЛА сохранять заданный режим полета при воздействии различных внешних возмущений. Степень статической устойчивости зависит от расстояния между центром масс xц.м и центром давления xц.д:
При х > 0 ЛА будет статически устойчив; чем больше значение х, тем быстрее ЛА возвращается в исходное положение. Поэтому с целью обеспечения большей устойчивости ЛА обычно увеличивают
В режиме маневра при отклонении органов управления, т. е. при переходе с одного установившегося полета в другой, происходит изменение параметров движения в течение некоторого промежутка времени. Для оценки этого режима вводится понятие «управляемость», которое характеризует способность ЛА совершать тот или иной маневр. Управляемость ЛА зависит от многих факторов, в том числе и от. При прочих равных условиях ЛА будет обладать большей управляемостью при возможно меньших значениях……
Скачать полную версию работы 
СКАЧАТЬ работу l-raketostroenie/lekcii_raketostroenie_04.rar
http://studentik.net/lekcii/raketa/4084-principy-osushhestvlenija-upravljaemogo-poleta.html