Вращения твердого тела вокруг неподвижной точки
Содержание:
Вращением твердого тела вокруг неподвижной оси называется такое движение твердого тела, при котором хотя бы две его точки остаются неподвижными. Прямая, проходящая через эти неподвижные точки называется осью вращения. Траекториями движения точек твердого тела являются окружности с радиусами равными расстояниям от заданных точек тела до оси вращения.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Вращения твердого тела вокруг неподвижной точки (сферическое движение)
Движение тела вокруг неподвижной точки (центра) называется сферическим движением. Сформулируем определение сферического движения.
Вращением твердого тела вокруг неподвижной точки называют такое движение, при котором одна точка тела остается все время неподвижной, а все остальные точки движутся по кругам, которые расположены на поверхностях сфер, описанных с неподвижной точки.
Одной из главных задач при изучении сферического движения является нахождение величин, характеризующих это движение: положение тела, угловые скорость и ускорение тела, вычисления скоростей и ускорений точек тела.
Рассмотрим движение тела вокруг неподвижного центра О (рис. 2.39). Выберем неподвижную систему отсчета Ox1y1z1, относительно которой будем изучать движение тела, и подвижную — Oxyz, которую жестко свяжем с телом, что движется. Начало обеих систем координат расположим в неподвижном центре.
Для определения положения вращающегося тела относительно неподвижной системы координат Ox1y1z1 необходимо задать относительно этой системы координат положения другой, подвижной системы координат Oxyz, скрепленной с движущимся телом. Для этого Эйлер предложил следующую теорему:
«Произвольное перемещение твердого тела вокруг неподвижной точки можно выполнить тремя последовательными поворотами тела вокруг трех осей, проходящих через неподвижную точку».

Согласно этой теореме положения тела, вращающегося вокруг неподвижной точки, определяется тремя углами. Линия ОК, вдоль которой пересекаются плоскости Oxy и Ox1y1 называется линией узлов. Тогда положения подвижных осей координат x, y, z (рис. 2.39) по отношению к неподвижной системе отсчета Ox1y1z1 можно определить тремя углами:
 ,
,
 ,
,
 .
.
Эти углы носят название углов Эйлера и имеют следующие наименования:
1.  — угол прецессии, изменение которого означает вращение тела вокруг оси Oz1, которая называется осью прецессии;
— угол прецессии, изменение которого означает вращение тела вокруг оси Oz1, которая называется осью прецессии;
2.  — угол нутации, изменение которого характеризует вращение тела вокруг линии узлов ОК, которая является осью нутации;
— угол нутации, изменение которого характеризует вращение тела вокруг линии узлов ОК, которая является осью нутации;
3. φ — угол собственного вращения, изменение которого означает вращение тела вокруг оси Oz, которая является осью собственного вращения.
Первый угол y, угол прецессии, который определяет положение линии узлов ОК относительно неподвижной координатной оси Ox1, считается положительным, если он отсчитывается при повороте линии узлов ОК против часовой стрелки, если смотреть навстречу оси Oz1.
Вторым углом Эйлера является угол нутации , угол между координатными плоскостями x1Oy1 и xOy, который можно измерять между перпендикулярами к указанным плоскостям — Oz1 и Oz. Положительное направление угла — поворот против часовой стрелки оси Oz вокруг точки О, если смотреть навстречу линии узлов ОК. Угол отсчитывается от оси Oz1.
Для полного определения положения данного тела относительно неподвижной системы Ox1y1z1 необходимо задать угол между подвижной осью Ох и положительным направлением линии узлов ОК — угол собственного вращения φ. Этот угол считается положительным, если он меняется против часовой стрелки, смотря навстречу оси Oz.
При изменении угла φ тело вращается вокруг оси собственного вращения Oz, перпендикулярной плоскости, где расположены прямые ОК и Ox, образующих этот угол. Таким образом, угол φ определяет положение подвижной координатной оси Ox относительно линии узлов ОК.
Углы Эйлера широко применяются в теории гироскопа. Движение гироскопа, симметричного тела с неподвижной точкой на оси симметрии, которое очень быстро (30-40 тысяч об/мин.) вращается вокруг этой оси, можно представить составленным из трех движений, которые определяются углами , , φ . Изменение углов и имеет скорость на 1-2 порядка ниже, чем угла собственного вращения φ.
При вращении тела вокруг неподвижной точки в общем случае изменяются все три угла Эйлера: , , φ. Эти углы являются независимыми параметрами, которые определяют положение тела при сферическом движении относительно неподвижной системы координат. Задание трех углов Эйлера, как функции времени, являются необходимыми и достаточными условиями для полного описания сферического движения.
Следовательно, для определения положения тела с одной неподвижной точкой в любой момент времени необходимо задать углы Эйлера как однозначные и непрерывные функции времени:
 ,
,
 ,
,
 .
.
Уравнение является кинематическими уравнениями вращения твердого тела вокруг неподвижной точки. Если эти уравнения заданы, то в любой момент времени может быть определено положение твердого тела относительно неподвижной системы координат.
Действительно, отложим сначала в плоскости x1Oy1 от оси Ox1 угол прецессии y против часовой стрелки, если он положительный, и определим положение линии узлов ОК. Далее отложим угол q от оси Oz1, плоскость которого перпендикулярна линии узлов ОК, и определим положение оси z собственного вращения. И наконец, отложим в плоскости xOy угол φ от линии узлов против часовой стрелки, если он положительный, и определим положение оси Ox. Положение тела определено однозначно.
Теорема Эйлера – Даламбера
Произвольное элементарное перемещение тела, имеющего одну неподвижную точку, может осуществляться по одному элементарному повороту вокруг некоторой специально выбранной мгновенной оси вращения, проходящей через эту неподвижную точку.
Предположим, что положение тела, которое вращается вокруг точки О, определяется углами , , φ (как это показано на рис. 2.39).
Тогда его перемещения за элементарный промежуток времени можно представить как совокупность поворотов на углы d, d, dφ, вокруг оси Oz1, линии узлов ОК и оси Oz соответственно. Прибавляясь, эти три поворота создадут одно действительное элементарное перемещение тела.
Сначала рассмотрим, каким будет результат сложения поворотов вокруг осей Oz и Oz1, (рис. 2.40). При повороте на угол dφ любая точка тела, лежащего в плоскости Ozz1 (внутри угла zOz1), получит элементарное перемещение, которое перпендикулярно этой плоскости и численно равна  ,
,  — расстояние от точки до оси Oz. Одновременно, при повороте вокруг оси Oz1 та же точка получит обратное перемещение, которое численно равна
— расстояние от точки до оси Oz. Одновременно, при повороте вокруг оси Oz1 та же точка получит обратное перемещение, которое численно равна  .
.

Внутри угла  обязательно найдется такая точка В, для которой
обязательно найдется такая точка В, для которой  =
=  . Это означает, что перемещение этой точки равно нулю, и точка B будет неподвижной. Таким образом, имеем две неподвижные точки O и В, следовательно, неподвижную ось ОВ, вокруг которой происходит то самое элементарное вращение, которое составляет сумму вращений вокруг осей Oz и Oz1.
. Это означает, что перемещение этой точки равно нулю, и точка B будет неподвижной. Таким образом, имеем две неподвижные точки O и В, следовательно, неподвижную ось ОВ, вокруг которой происходит то самое элементарное вращение, которое составляет сумму вращений вокруг осей Oz и Oz1.
Если теперь рассматривать вращения вокруг оси ОВ и линии узлов ОК, после аналогичных соображений придем к выводу, что элементарные повороты вокруг осей ОВ и ОК эквивалентны элементарному повороту вокруг некоторой оси ОР, проходящей через точку О.
Таким образом, ось ОР, элементарным поворотом вокруг которой тело перемещается из данного положения в соседнее, бесконечно близкое данному называется мгновенной осью вращения.
Следует заметить, что от неподвижной мгновенная ось вращения отличается тем, что ее положение меняется как в отношении системы отсчета Ox1y1z1, так и в отношении подвижной системы координат Oxyz. Каждое последующее вращение происходит вокруг своей мгновенной оси вращения, которая, безусловно, всегда пересекает неподвижную точку О.
То есть, движение твердого тела вокруг неподвижной точки состоит из серии последовательных элементарных поворотов вокруг мгновенных осей вращения, которые пересекают неподвижную точку.
Геометрическое место мгновенных осей вращения относительно неподвижной системы отсчета называется недвижимым аксоидом. Неподвижный аксоид является конической поверхностью с вершиной в неподвижной точке тела, потому что все мгновенные оси пересекают неподвижную точку.
Геометрическое место мгновенных осей во вращающемся теле называют подвижным аксоидом, который также является конической поверхностью. Для каждого движения твердого тела вокруг неподвижной точки имеем пару аксоидов. Таким образом, во вреся сферического движения подвижной аксоид катится по неподвижному без скольжения, поскольку общая образующая этих аксоидов в каждый момент времени служит мгновенной осью, вокруг которой вращается тело, поэтому все точки оси неподвижные. Если подвижный аксоид катится без скольжения по неподвижному аксоиду, то происходит движение тела вокруг неподвижной точки.
Кинематические характеристики движения тела вокруг неподвижной точки
Угловая скорость:
Сделаем сначала определения угловой скорости тела, вращающегося вокруг неподвижной точки.
Угловая скорость, с которой происходит элементарный поворот тела вокруг мгновенной оси вращения, называется угловой скоростью тела в данный момент времени или мгновенной угловой скоростью тела.
Согласно этому определению, если тело вернется вокруг мгновенной оси на некоторое бесконечно малый угол dφ, то мгновенной угловой скоростью будет:
 .
.
Угловую скорость можно изобразить в виде вектора  , направленного вдоль мгновенной оси ОР (рис. 2.41).
, направленного вдоль мгновенной оси ОР (рис. 2.41).

Если учесть, что положение мгновенной оси ОР непрерывно меняется, то вектор угловой скорости  будет меняться в течении времени как по модулю, так и по направлению, а конец вектора будет описывать некоторую произвольную кривую AB, которая является годографом вектора
будет меняться в течении времени как по модулю, так и по направлению, а конец вектора будет описывать некоторую произвольную кривую AB, которая является годографом вектора  . На рис. 2.41 показаны различные положения мгновенной оси вращения OP, OP1, OP2 и соответственно расположенные на них векторы угловой скорости
. На рис. 2.41 показаны различные положения мгновенной оси вращения OP, OP1, OP2 и соответственно расположенные на них векторы угловой скорости  ,
,  и
и  .
.
Угловое ускорение:
Второй кинематической характеристикой тела, вращающегося вокруг неподвижной точки является угловое ускорение.
Угловое ускорение тела в данный момент времени, или мгновенное угловое ускорение  , которое характеризует изменение в течении времени угловой скорости
, которое характеризует изменение в течении времени угловой скорости  по модулю и по направлению, является векторной величиной и численно равна:
по модулю и по направлению, является векторной величиной и численно равна:
 .
.
Для нахождения расположения вектора углового ускорения можно использовать такую аналогию. Как известно, вектор скорости  произвольной точки равен производной от радиус-вектора
произвольной точки равен производной от радиус-вектора  этой точки по времени t и направлен вдоль касательной к траектории движения точки. В этом случае траектория точки является годографом концов радиус-векторов .
этой точки по времени t и направлен вдоль касательной к траектории движения точки. В этом случае траектория точки является годографом концов радиус-векторов .
По аналогии с этим, вектор углового ускорения направлен по касательной к кривой AB в соответствующей точке. То есть, угловое ускорение можно считать, как скорость движения конца вектора  .
.
Таким образом, вектор мгновенного углового ускорения имеет направление производной по времени от вектора мгновенной угловой скорости , он параллельный касательной к годографу векторной функции (t). Изображать угловое ускорение необходимо вектором, параллельный касательно к годографу векторов угловой скорости в данной точке, но приложенный к неподвижной точке O (рис. 2.40).
Скорости и ускорения точек тела в сферическом движении
Векторная формула Эйлера (2.54), полученная для вращательного движения тела вокруг неподвижной оси, справедлива и для сферического движения тела.
В сферическом движении в каждый момент времени тело вращается вокруг мгновенной оси OP, которая пересекает неподвижную точку O, с угловой скоростью , вектор которой расположен на мгновенной оси. Точки тела, которые принадлежат мгновенной оси OP, имеют скорости  , равны нулю, как и в случае неподвижной оси вращения.
, равны нулю, как и в случае неподвижной оси вращения.
Следовательно, скорость  произвольной точки М тела (рис. 2.42) определяется как векторное произведение и
произвольной точки М тела (рис. 2.42) определяется как векторное произведение и  . А именно:
. А именно:
 ,
,
где — радиус-вектор точки M относительно неподвижной точки О.
Модуль скорости при этом будет равен:
 ,
,
где h — кратчайшее расстояние точки к мгновенной оси OP.
Таким образом, скорости точек тела в сферическом движении пропорциональны расстояниям от этих точек к мгновенной оси. Направление вектора скорости перпендикулярно плоскости, в которой расположены векторы и , то есть расстоянию h и направлен в сторону вращения.

Как известно, скорость точки является первой производной от радиус-вектора этой точки по времени (2.4):
 .
.
В то же время, по векторной формуле (2.54) скорость равна , откуда:

Длина радиус-вектора , как расстояние между двумя точками твердого тела, является постоянной величиной при движении этого тела. Следовательно, уравнение (2.77) можно рассматривать как формулу для вычисления производной по времени от вектора, модуль которого устойчивый, а изменение его происходит только вследствие вращения с угловой скоростью вместе с телом вокруг неподвижной точки.
Если жестко скрепить подвижную систему координат Oxyz с телом, вращающимся вокруг неподвижной точки с угловой скоростью , так для единичных векторов  ,
,  ,
,  , направленных по этим осям, модули которых постоянные, на основании (2.77) имеем:
, направленных по этим осям, модули которых постоянные, на основании (2.77) имеем:
 ,
,
 ,
,
 .
.
Выражения называют формулами Пуассона.
Для определения ускорения точки тела, которое осуществляет сферическое движение, возьмем производную по скалярному аргументу t (время) от векторной функции скорости :
 .
.
 ,
,
 .
.
тогда окончательно имеем:

В отличии от вышеупомянутой формулы, здесь и — угловые скорость и ускорение вокруг мгновенных осей, первое слагаемое — вращательное ускорение:
 ,
,
второе слагаемое — осевое ускорение:
 .
.
Движение свободного твердого тела
Рассмотрим наиболее общий случай движения твердого тела — свободное движение тела, когда оно может как угодно перемешиваться относительно неподвижной системы отсчета Oxyz (рис. 2.43).
Как известно из аналитической геометрии, положения твердого тела в пространстве можно определить тремя точками, которые не расположены на одной прямой и неизменно связаны с телом.

На девять координат этих точек наложено три ограничения, которые выражают неизменность расстояний между точками, потому что они принадлежат твердому телу. Итак, независимых параметров или степеней свободы тела будет шесть.
Смотря с другой стороны, при определении положения твердого тела можно задать три координаты одной его точки, например, точки A, которую назовем полюсом с координатами  ,
,  ,
,  , и выбрать еще три параметра, характеризующих вращения тела вокруг полюса. Остальные параметры могут быть углами Эйлера , , φ (на рис. 2.43 не показаны). Совокупность шести скалярных функций времени, которые однозначно определяют положение свободного твердого тела в любой момент времени, является законом его движения:
, и выбрать еще три параметра, характеризующих вращения тела вокруг полюса. Остальные параметры могут быть углами Эйлера , , φ (на рис. 2.43 не показаны). Совокупность шести скалярных функций времени, которые однозначно определяют положение свободного твердого тела в любой момент времени, является законом его движения:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Три первые уравнения определяют движение полюса и вместе с ним поступательное движение твердого тела. Последние три уравнения определяют движение тела относительно системы координат  (то есть относительно точки A, как неподвижной).
(то есть относительно точки A, как неподвижной).
Таким образом, с геометрической точки зрения элементарное перемещение свободного тела состоит из поступательного перемещения вместе с полюсом, при котором полюс переходит в соседнее положение  , и с некоторого перемещения по отношению к осям
, и с некоторого перемещения по отношению к осям  .
.
Последнее перемещения по теореме Эйлера-Даламбера является поворотом вокруг мгновенной оси вращения  , которая проходит через точку A.
, которая проходит через точку A.
Поскольку движением тела является совокупность элементарных перемещений, то можно его обозначить следующим образом:
«Свободное движение тела в общем случае состоит из поступательного движения, при котором все точки тела движутся как произвольно выбранный полюс A со скоростью полюса  , и ряда элементарных поворотов с угловой скоростью ω вокруг мгновенных осей вращения, которые проходят через полюс» (рис. 2.44).
, и ряда элементарных поворотов с угловой скоростью ω вокруг мгновенных осей вращения, которые проходят через полюс» (рис. 2.44).

Свободно движутся брошенный камень, снаряд, неуправляемая ракета тому подобное.
Основными кинематическими характеристиками движения является скорость и ускорение  полюса, которые определяют скорость и ускорение поступательной части движения, а также угловая скорость ω и угловое ускорение ε вращения вокруг полюса. Значения величин этих характеристик можно определить по уравнениям.
полюса, которые определяют скорость и ускорение поступательной части движения, а также угловая скорость ω и угловое ускорение ε вращения вокруг полюса. Значения величин этих характеристик можно определить по уравнениям.
В отдельном случае движение свободного тела может быть плоскопараллельным. Тогда вектор угловой скорости  будет всегда перпендикулярен плоскости движения. При этом, как в общем случае, так и в отдельном, вращающаяся часть движения, как и значение угловой скорости ω, от выбора полюса не зависит.
будет всегда перпендикулярен плоскости движения. При этом, как в общем случае, так и в отдельном, вращающаяся часть движения, как и значение угловой скорости ω, от выбора полюса не зависит.
Определим скорости и ускорения точек свободного тела.
Как и в случае плоскопараллельного движения, можно предположить, что скорость и ускорение точки свободного тела состоит геометрически со скорости ускорения векторов полюса и относительной скорости (ускорение) точки вокруг полюса (последние получает точка M при движении вместе с телом вокруг полюса A)
 ,
,
 ,
,
где  ;
;  ;
;  — радиус-вектор точки M относительно полюса A;
— радиус-вектор точки M относительно полюса A;  — скорость точки M относительно полюса A;
— скорость точки M относительно полюса A;  — ускорение точки M относительно полюса A; ε — угловое ускорение тела.
— ускорение точки M относительно полюса A; ε — угловое ускорение тела.
Услуги по теоретической механике:
Учебные лекции:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Динамические уравнения Эйлера


Динамические уравнения Эйлера
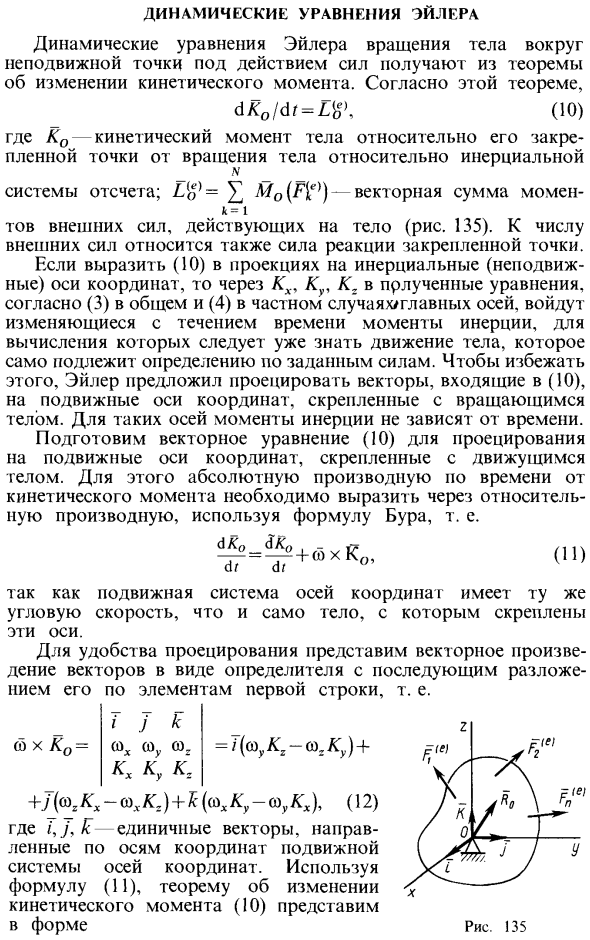
- Динамическое уравнение Эйлера для вращения объекта вокруг неподвижной точки под действием силы можно вывести из теоремы об изменении момента движения. Согласно этой теореме, dKoldt = L ^>, (10) Где Ko — момент движения тела относительно неподвижной точки от вращения тела относительно инерциальной системы отсчета. D> | = X — векторная сумма моментов Т внешней силы, действующей на тело (рис. 135). Среди внешних сил есть сила реакции в фиксированной точке.
Когда снаряд находится в движении, его центр тяжести движется так, как если бы в нем была сосредоточена вся масса тела и к нему были приложены все действующие на снаряд внешние силы. Людмила Фирмаль
Когда (10) представляется проекцией на инерциальную (фиксированную) координатную ось, моменты, которые меняются со временем, в зависимости от конкретного случая основных (3) и (4) главных осей, через Kx, Ku, K В том числе обычное уравнение инерции. Это расчет, который уже должен знать движение тела, и сам должен определяться силой, данной. Чтобы избежать этого, Эйлер предложил проецировать вектор (10) на движущуюся ось координат, прикрепленную к вращающемуся телу.
- Для таких осей момент инерции не зависит от времени. Подготовьте векторное уравнение (10) для проекции на оси подвижных координат, закрепленных на движущемся объекте. По этой причине абсолютная производная по времени от момента движения должна быть выражена как относительная производная по формуле Бора. + К. Болезнь.
Это связано с тем, что система перемещения осей координат имеет ту же угловую скорость, что и само тело, с которым эти оси связаны. Представлено векторное поколение для удобства проецирования Удалить вектор в виде определителя, затем развернуть до элементов первой строки, т.е. | J K I шхко = тсс шу юг = / (шу ^ 1-шхх) + | к * к, кг я + j (azKx-axKz) + H (axKy-ayKx), (12) где i, j и H — единичные векторы, ориентированные вдоль осей координат движущейся системы координат.
В разделе упражнений будет показано, что систему векторов можно всегда привести к таким двум векторам, из которых Ъдин лежит на произвольной прямой, не параллельной главному вектору. Людмила Фирмаль
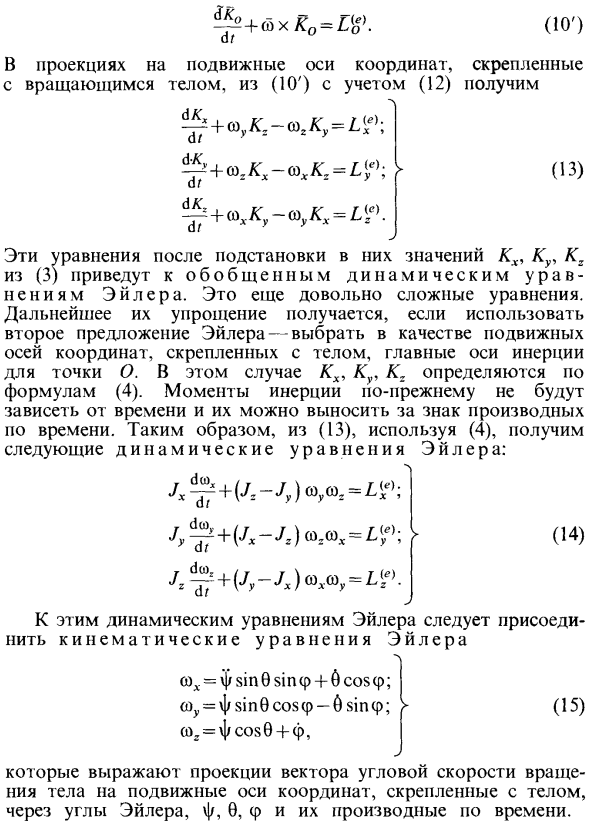
Используйте уравнение (I) для выражения теоремы об изменении момента движения (10) в следующем виде: Рисунок 135 В проекции на ось подвижной координаты, прикрепленной к вращающемуся телу, с учетом (10 ‘) — (12), ^ + — (15) sog = f cos6 4-f, Это представляет проекцию угловой скорости вращения объекта на движущиеся координатные оси, прикрепленные к объекту через углы Эйлера f, 6, f и их производные по времени.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Решение уравнений Эйлера, описывающих движение тяжелого твердого тела около неподвижной точки, в общем случае Текст научной статьи по специальности « Математика»
Похожие темы научных работ по математике , автор научной работы — Мануйлов Константин Викторович, Курбатов А.А.
Текст научной работы на тему «Решение уравнений Эйлера, описывающих движение тяжелого твердого тела около неподвижной точки, в общем случае»
РЕШЕНИЕ УРАВНЕНИИ ЭЙЛЕРА, ОПИСЫВАЮЩИХ ДВИЖЕНИЕ ТЯЖЕЛОГО ТВЕРДОГО ТЕЛА ОКОЛО НЕПОДВИЖНОЙ ТОЧКИ, В ОБЩЕМ СЛУЧАЕ
К.В. Мануйлов, А-А. Курбатов
Решение задачи о движении тяжелого твердого тела около неподвижной точки в общем случае является чрезвычайно важным для построения аналитического описания трудно обозримого множества различных динамических систем, начиная от движения корабля на волнении [1] и кончая движением систем с большим числом степеней свободы. Кроме того, полные уравнения движения, описывающие поведение угловых скоростей, дают возможность построить решения практически всех нестационарных уравнений математической физики [2].
Однако, несмотря на создание теории абелевых функций, содержащей все необходимое для ее решения — вплоть до выражения в известных функциях уравнений Эйлера, это движение описывающих (впервые, хотя не до конца, в 1879 г. Г. Вебер [3]), она считается до сих пор неразрешимой в квадратурах, по всей видимости, всеми, кроме авторов настоящей статьи 5. Между тем функции, в которых выражаются кинематические параметры, описывающие движение тяжелого твердого тела около неподвижной точки — угловые скорости шг., и направляющие косинусы а^, являющиеся решениями уравнений Эйлера
ЛгБ&г + (Ak — Aj)®j®k = Fg(Xjoa,3k — Хмазу) ,
Daii = Ш 2 a i3 Ш3a i 2
Da г 2 = V ii — Шlai3 » , (1)(*)
Da г3 = Шla i 2 — Ш 2 a ii.
AiD шг + (Ak — Лу) ш j ok = Fg(Xj0ak з- x^a^)
Daii = Ш3 a 2 i — Ш2 a 3i
Da 2 i = ®1a 3i — ®3a1i » , (1Xb)
Da 3i = Ш2 a1i — ®1a 2i,
где А; — моменты инерции, шг- и шг- — угловые скорости относительно движущихся и
неподвижных осей, а^ — направляющие косинусы, х0 — координаты центра тяжести, ^ — сила тяжести, были полностью определены в результате алгебраического анализа уравнений (1), проведенного С.В. Ковалевской 12. Действительно, из полученного ею в результате приравнивания нулю детерминанта, образованного из системы (1),
A1s (( — A2 )»30^m (A3 — A2 )ш20ш3m P 1m — y0a33m z0a32m
((1 — A3 )ш10ш3от A2 s ((1 — A3 )ш30ш1m — z0a31m P2m z0a31m
(2 — A1 )ш10ш2m ((2 — A1 )ш20ШЪи A3 s — X0a32m y0a31m P3m
P 1 4 m — ш30a32m Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
а = с 6е б(»Ъ и 2) а ?г
а ?г = С 4 е 4(Ц1,и 2) а 3г
л а с5е5(иЬи2) а О, а 3 г =-аь-
где сг = е’ , а производные от отношений нечетных тэта-функций второго порядка имеют вид
ее^ с1с 4 ее с с
Ю 2 Ю3 е 2 е 2 -32-33
а 32 а 33 а 1 ^о ? ю 3 I в 123 а 32 а 33
а 31 а 33 а ? ю 1 ^о 3 I в 213 а 31 а 33
ю1ю2 а31а32 =а3ю1ю2 +в312а31а3
е 2 е 2 31 32 е14 е 24
Ю _ 2 /л2 а 23 а 33 а1 Ю 2 Ю3 + в123а 23 а 33
п_ ее^ ^с 5__е2 с? __в
ОЮ2 = ———ю3 — ——— а13а33 =а2ю1 ю3 + в213а13а33
16__е 2 с 2 ___
ю1 ю2——— а 13 а 23 =а 3 ю1 ю2 + в312 а13 а ?
а для общей системы сил, действующих на движущееся твердое тело [11]:
-а j 2 а 73 =а 1Ш 2 Ш3 ‘ 23 а г 2 а 13
-а па 73 =а 2 Ш1Ш3 +ЕР г 23а г1а г 3
а 71а 72 =а1Ш1Ш 2 123 а па 12
Однако уравнения (7)-(9) суть не уравнения Эйлера, описывающие движение тяжелого твердого тела около неподвижной точки, но лишь алгебраические выражения производных от четных и нечетных тригонометрических функций алгебраической кривой рода 2, эквивалентные деривационным уравнениям, описывающим движение репера, сопровождающего замкнутую кривую, лежащую на поверхности Куммера К24 (см. [2, 15]), из коих совпадают по виду с уравнениями Эйлера (1)(Ъ), (1 %Ь) уравнения (7).
Для преобразования их в уравнения, описывающие движения тяжелого твердого тела около неподвижной точки, необходимо переопределить постоянные вук, Рук, а именно, положить
тМ (Ъу — Ък) 4-я?з ЪуЪк_ тМ (Ьу — Ьк)
где ъу = ху0 «а 3к ,
периодически изменяющаяся сила
тяжести. Тогда правые части уравнений (8) и (9) станут эквивалентны правым частям уравнений (1)(а) и (1г)(о) (отметим, что уравнения (9) переводится в уравнения (8) поворотом системы координат). Такое переопределение приводит нас к заключению, что кинематические параметры являются периодическими функциями четырех переменных, ибо периодическое изменение силы тяжести преобразует модули к7, входящие в абелевы интегралы I рода ранга 2, определяющие периоды функций (4)-(5), вместе с периодами в периодически изменяющиеся величины, т.е. уравнения (1)(а) и (1г)(о) являются уравнениями с периодически изменяющимися коэффициентами (отметим, что из этого переопределения следует неразрешимость уравнений (1)(а) и (1г)(о) при постоянной силе тяжести). Но тогда, строго говоря, для построения уравнений Эйлера посредством дифференцирования кинематических параметров мы должны брать от них полные производные по времени, т.е. по переменным и 7, к7, из коих последние выражаются через начальные условия:
25 9 26 + 9 35 9 36
= А2(Лх — А3) + А3(Ах — А2) = 1
А1(А2 — А3) А1(А2 — А3)
Следовательно, как уравнения движения тяжелого твердого тела около неподвижной точки, так и уравнения движения тяжелого твердого тела с трением в
точке опоры и уравнения движения тяжелого деформируемого тела мы получим, взяв производные от кинематических параметров по иг, к,-:
Л1А Ю1 + (Л3 — Л2 )Ю 2 Ю3 = £вг23 (и )а 12 а 13 — Л1
2-^ + ?£ Вщ 1п е(и1, и -)Ои, +
г-к=12к’? к-к?к [ ди1 ди2 г=1
£ (и1к»г+ и2к2/г )кгк’-(к- +к-)
г-к=12к- к’- к к-к [ ди-2
+ 2О 1п 0(о1, и-)ОИ — _1 + —:£
£ (и1к 1 г; + и 2к-гг)к гк’2 к ? к
Л2Ю2 + (Л1 — Л3)Ю1_3 =£в 113(и)аг1аг3 — Л
+ 2ОИ1 1п0(О1,и-)Д^Ю- + -1£ д&2
г-к=1 ?к’2 к?-кгк [ ди1 ди2 г=1
+ 2£ 1п ^ и — ) О и г Ю- + и , (13)
£ (и1 к1гг+ и2 к-гг)кг к’-(к — +к
г-к=12к- к’? к к. [ ди-2
+ 2Ои? 1п 0(о1, и-)Ои — ю-+ -1 £
£ (и1 к1гг+ и 2 к -гг)к гк’ ? к ? к
4°Ю3 + (Л2 -Л1 )Ю1Ю2 = £вг12(и)аг1аг- -Л3
£(и1к1гг + и-к-гг )кгк’:
ук=12к’г. кгукг.к I ди1 ди2 г=1
£(и1к1гг + и-к-гг )кгк’2(к? +к1) 2 ^
Ук=12кгк’2 к?.к-к [а^2
£(и1к1гг + и-к-гг )кгк’-к?к-
_ дКп дК к;11 _ К22^ — К21
дК11 дК к;12 _ -К12 «Т + К11
к;21 _ К22 ^ -К21 «Т к;22 _ -К12″»I + К11
-л 1 -Л 1 ¿. >»> 1 1 -л
а К? суть полные абелевы интегралы I рода ранга два (см. [16]):
аа;/ _®2а;3 — М11пЭ(и1, и2)£>м1ая
Е(и1к1/; + и2к21; К*;2
Е(и1к/ + и2к21;)к;к; (к/ +кр ;_1
+А1п9(ц1, Ц2)Йи2ая Е^’1
Е(и1к1/; + и2к21;)к; к;2к/к2 .;_1
да; 2 _ ®3а;1 -®1а; 3 —
+2Ейи 1п6(и1, и2)йи; а;2 +
да; 3 _к>1а; 2 -®2а; 1 —
Е(и1к1/; + и2к2/;)к к;2(к/ +к?)
2к; к’/2 к1/к2к ди22
•+А1п9(и1,и2)Аи2а; 2 +Т2 Е^
Е(и1к1/; + и2к2/;)к к;2к^к2
+А1п6(и1, и2)А Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
a13 = a^dnu^cnu 2 a 23 = a23cnu 2 a 33 = a33dnu^dnu 2
(ср. (15)); часть же кинематических параметров при к2 = 0 ввиду обращения в нуль коэффициентов а12 и а22 квадратичной формы, входящей в тэта-функции, будет представлена произведениями эллиптических функций Якоби на экспоненты, а часть — одними экспоненциальными функциями.
Так как уравнения (13), (14) описывают движение тяжелого твердого тела около неподвижной точки, происходящее под действием периодически изменяющейся внешней силы то они же описывают движение этого тела при условии, что его центр тяжести движется около неподвижной точки по замкнутой пространственной кривой, лежащей на некоторой алгебраической (механической) поверхности, из чего следует, что кинематические параметры (4), (4′) и (5) дают точное аналитическое описание движения корабля на волнении (см. [1, 20]).
Но, следовательно, они же дают и точное аналитическое описание качения тяжелого твердого тела, ограниченного выпуклой алгебраической поверхностью
по плоскости (обобщение движения Пуансо — см. [21]), при котором нуль-центр инерции вращающих сил описывает кривую, лежащую на одной из эволютных поверхностей поверхности (16), а угловые скорости шг-, как нетрудно заключить из системы
1 + = lß/23(u )«/2 а/3 + A
Dt ln а, + — I^Dtкj
‘ i2 2 2 jk=i2Kjк jiк jk
I(u1K1/i + u2 K2/i )Ki к
222 jk=12KjK jiK jk
^ + 2I V» 9(U1, U2)Du,V + K Zu
+ u2 K2/i )Ki Ki2(K2^J +KI )
,2 2 2 jk=12K j K j K jiK jk
I(u1K1/i + u2K2/i )KiKi2K*K
представляют собой решения уравнений Эйлера — Стокса, описывающих движение вязкой сжимаемой жидкости, вызванное поступательные движением в ней твердого тела, ограниченного поверхностью (16).
Для построения естественного полного описания движения сплошной среды -реальной жидкости, обтекающей движущееся в ней твердое тело, ограниченное поверхностью (16), необходимо и достаточно, приняв поверхность (16) за абсолютную поверхность, порождающую соответствующую проективную геометрию, а потому неподвижную (см. [22]), определить движения сплошной среды (пространства), оставляющие ее на месте, вращениями относительно двух систем осей и построить описывающие эти вращения уравнения Эйлера — Стокса и волновые уравнения посредством вычисления первой и второй субстанциональных производных от составляющих вектора линейной скорости жидкости, определенных равенствами
где Шу, шк суть решения уравнений (13), (14), Ху, Хк — координаты точки, лежащей на поверхности (16).
1. Крылов А Н. Качка корабля. / Собр. трудов. Т. XI, М.-Л., ИАН СССР, 1951.
2. Мануйлов К.В. Конические сечения, теорема Абеля и нелинейные задачи математической физики. // Quaest. Phil. Nat. 1998-1999. № 2-3. С. 8-54.
3. Weber H. Anwendung der Theta functionen zweier Veränderlicher auf die Teorie der Bewegung eines festen Körpers in einer Flüssigkeit. Math. Ann., B. XIV, 1879, S. 173206. (Русский перевод в Quaest. Phil. Nat. № 4-5. С.218-256. В печати).
4. Зиглин С.Л. Ветвление решений и несуществование первых интегралов в гамильтоновой механике. I, II. // Функциональный анализ и его приложения. 1982. 16. Вып. 3. С. 30-41. 1983, 71. Вып. 1. С. 8-23.
5. Horozov E., van Moerbeke P. The full geometry of Kowalewski’s Top and (1,2) Abelian Surfaces. // Comm. on pure and appl. Math. 1989. V. XLII. № 4. Р. 357-407.
6. Фоменко А.Т. Топология поверхности постоянной энергии, интегрирование гамильтоновых систем и препятствия к интегрируемости. // Изв. АН СССР. Математика. 1986. Т. 50. № 6. С. 1230-1276.
7. Bobenko A.L., Reyman A.G., Semenov Tian Shansky M.A. Kowalewski’s Top 99 years later; Lax pair, generalization and explicit solution. Comm in Math. Phys., 188, 1989, pp. 321-354.
8. Дубровин Б.А. Римановы поверхности и нелинейные уравнения. М.-И.: РХД, 2001. С. 135-148.
9. Ковалевская С.В. Задача о вращении твердого тела около неподвижной точки. / Научные работы. М.-Л.: ИАН СССР, 1948. С. 153-220.
10. Грозденский С.Я. Андрей Андреевич Марков. М.: Наука, 1987. С. 68-71.
11. Мануйлов К.В., Волкова О.В., Ильин В.А., Курбатов А.А. Движение тяжелого твердого тела около неподвижной точки в общем случае. // В сб. «Проблемы пространства, времени, движения». РАН. ОАО СПб Технология. Санкт-Петербург. 1997. С. 203-258._
12. Мануйлов К.В., Курбатов А.А. О вращении твердого тела около неподвижной точки. // В сб. «Проблемы пространства и времени в современном естествознании», АН, СПб., 1993, с. 359.
13. Maschke H. Ueber die quaternäre endliche, lineare Substitutionsgruppe der Borchardt’schen Moduln. Math. Ann., Bd. XXXIII, 1889, s. 317-323. (Русский перевод в Quaest. Phil. Nat. № 4-5. С.185-201. В печати).
14. Coble A. An application of Moore’s cross-ratio groupe to the solution of the sextic equation. Trans. A.M.S. v. XII, 1911, p. 311-325. (Русский перевод в Quaest. Phil. Nat. № 4-5. С.202-217. В печати).
15. Каган В.Ф. Основы теории поверхностей. М.-Л. ГИТТЛ. 1947. С. 206-209.
16. Krause M. Die Transformation der Hyperelliptischen Functionen erster ordnung. Leipzig, Teubner, 1886.
17. Weber H. Ueber die Kummer’sche Fläche vierter Ordnung mit sechzehn Knotenpuncten und ihre Bezeinhung zu den Thetafunctionen mit zwei Veränderlichen. Jorn. für. Math. Bd. LXXXIV. s.332-354. 1878.
18. Appel P. Sur des cas de reduction de fonction 0 de plusiers variables à de fonction 0 d’un moindre nombre de variables. Bull. Math. Soc. France. t. X. 1882. p.59-67.
19. Jacobi C.G.J. Anzeige von Legendre: Théorie des fonctions elliptiques, troisième supplément. Gesamm. Werke. Bd. I. Berlin Reimer 1881. s. 373-382. (Русский перевод в Quaest. Phil. Nat. № 1. 1998. С. 128-135.)
20. Мануйлов К.В., Мостовский Н.П. Аналитическое описание движения корабля на волнении. // Междунар. научная конф. по механике «Третьи Поляховские чтения». Тезисы докладов. СПб, 2003. С. 148-149.
21. Poinsot L. Théorie nouvelle de la rotation des corps. Journ. math. pures et appliques. 1851. T. XVI. Рр. 9-129, 289-336.
22. Клейн Ф. Неевклидова геометрия. М.-Л., ОНТИ, 1936.
http://lfirmal.com/dinamicheskie-uravneniya-ehjlera/
http://cyberleninka.ru/article/n/reshenie-uravneniy-eylera-opisyvayuschih-dvizhenie-tyazhelogo-tverdogo-tela-okolo-nepodvizhnoy-tochki-v-obschem-sluchae