Вращение твердого тела вокруг неподвижной оси в теоретической механике
Содержание:
Вращение твердого тела вокруг неподвижной оси:
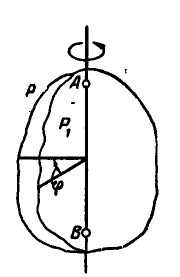
Вращением тела вокруг неподвижной оси называется такое его движение, при котором две точки тела, например А и В, неподвижны (рис. 162). Прямая, проходящая через указанные две неподвижные точки, называется осью вращения. Если мысленно провести через тело две полуплоскости — неподвижную 
При вращении тела угол поворота его  изменяется с течением времени, а поэтому он является функцией времени:
изменяется с течением времени, а поэтому он является функцией времени:

Уравнение (97) называется уравнением вращения; зная его, можно для любого момента t найти угол , а следовательно, и положение вращающегося тела.
Величины угловой скорости и углового ускорения тела, вращающегося вокруг неподвижной оси, определяются по формулам (87) и (90).
Если  , то такое вращение тела называется равномерным и уравнение вращения его (97) напишется аналогично уравнению (71) расстояний точки, движущейся равномерно:
, то такое вращение тела называется равномерным и уравнение вращения его (97) напишется аналогично уравнению (71) расстояний точки, движущейся равномерно:

Поэтому такое уравнение по аналогии с равномерным движением точки называется уравнением равномерного вращения.
Точно так же, если  то вращение тела называется равнопеременным.
то вращение тела называется равнопеременным.
Уравнения равнопеременного вращения тела могут быть выведены аналогично уравнениям (82) и (83) равнопеременного движения точки путем замены линейных характеристик угловыми и записаны в виде:

Условимся угловую скорость вращающегося тела изображать вектором, отложенным по оси вращения в такую сторону, чтобы, смотря с конца этого вектора, вращение тела происходило в направлении, противоположном движению часовой стрелки (рис. 163).
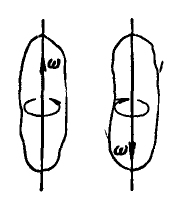
При вращении тела вокруг неподвижной оси (рис. 164) любая точка его М, отстоящая на расстоянии h от оси вращения, описывает окружность радиуса h и имеет линейную скорость, определяемую формулой (89): 
Если провести из любой точки О оси радиус-вектор в точку М, то вектор линейной скорости точки М может быть представлен также в виде векторного произведения  на
на  :
:

В самом деле, раскрывая векторное произведение, получим величину скорости, определяемую формулой (89):

Вектор же скорости направлен перпендикулярно к плоскости векторов на в такую сторон, чтобы обход контура параллелограмма, построенного на на , задаваемый первым вектором  , стоящим в векторном произведении, происходил против часовой стрелки, что согласуется с определением векторного, произведения двух векторов.
, стоящим в векторном произведении, происходил против часовой стрелки, что согласуется с определением векторного, произведения двух векторов.
Рис. 164. Рис. 165.
В самом общем случае, когда ось вращения тела составляет любые углы с координатными осями (рис. 165), проекции скорости точки М могут быть найдены по формулам проекций векторного произведения двух векторов (11):

Равенства (101) называются формулами Эйлера. Здесь 
 — проекции
— проекции  ; а
; а  —проекции
—проекции  на координатные оси.
на координатные оси.
Если ось вращения вертикальна (рис. 164), то 
 и формулы Эйлера принимают вид:
и формулы Эйлера принимают вид:

что было получено нами раньше (88). Мы уже знаем, что величина углового ускорения  определяется по формуле (90).
определяется по формуле (90).
Введем в рассмотрение вектор углового ускорения е, под которым мы будем понимать векторную величину:

Так как  имеет постоянное направление, то вектор
имеет постоянное направление, то вектор  всегда совпадает с осью вращения.
всегда совпадает с осью вращения.
При  векторы
векторы  — одного направления;
— одного направления;
при  векторы — противоположных направлений.
векторы — противоположных направлений.
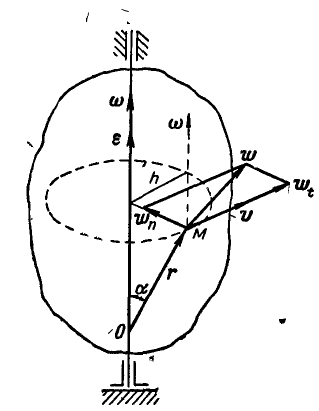
Нормальное и касательное ускорения любой точки М вращающегося тела (рис. 166) Moryт быть найдены по формулам (91):

Дадим векторное обобщение этим величинам. В самом общем случае вектор ускорения может быть найден по формуле (79):
Принимая во внимание формулы (100) и (102), имеем:



Действительно, в силу определения векторного произведения, находим:

Это приводит нас к формулам (91). Направления же  соответствуют правилу откладывания векторов, полученных по правилам векторного произведения (рис. 166).
соответствуют правилу откладывания векторов, полученных по правилам векторного произведения (рис. 166).
Задача №1
Маховик делает 360 об/мин. Найти его угловую скорость  . ,
. ,
Решение. В нашем случае  По формуле (94) находим:
По формуле (94) находим:

Задача №2
Маховик начинает вращаться равноускоренно из состояния покоя. Сделав с момента начала движения 60 оборотов, маховик имеет угловую скорость, равную  Определить угловое ускорение маховика.
Определить угловое ускорение маховика.
Решение. По условию задачи 
 и
и 
По формулам (99) получаем:
Подставляя значение  , найденное из первого уравнения, во второе, находим:
, найденное из первого уравнения, во второе, находим:

Задача №3
Тело делает  вокруг оси, составляющей углы
вокруг оси, составляющей углы  с координатными осями; при этом
с координатными осями; при этом  ,
,  и
и .
.
Найти такую точку тела, расположенную в плоскости  , проекции скорости которой суть:
, проекции скорости которой суть:  .
.
Решение. Угловая скорость:

Для определения  имеем известное соотношение:
имеем известное соотношение: 

 , откуда:
, откуда:

Найдем теперь проекции угловой скорости на координатные оси:
По формулам Эйлера (101) имеем:
Из первых двух уравнений находим, что  и
и  , а поэтому искомая точка будет:
, а поэтому искомая точка будет: 
Задача №4
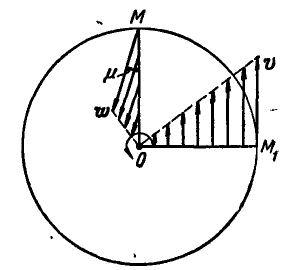
Маховик радиусом R = 1 м вращается вокруг неподвижной оси, проходящей через его центр перпендикулярно к плоскости чертежа, согласно уравнению 
Найти скорость и ускорение точки М обода маховика по прошествии  после начала его движения. Для всех точек маховика, расположенных вдоль радиуса ОМ, изобразить графически скорости и ускорения.
после начала его движения. Для всех точек маховика, расположенных вдоль радиуса ОМ, изобразить графически скорости и ускорения.
Решение. Найдем сначала по формулам (87) и (90) угловую скорость и угловое ускорение маховика:
Далее, линейная скорость, нормальное и касательное ускорения’ точки М в момент t найдутся по формулам (89) и (91):

При  и
и 
Величина и направление ускорения точки М определятся по формулам (92) и (93):

Так как величины линейных скоростей и ускорений точек, расположенных на одном из радиусов’маховика, например ОМ, зависят от величины самого радиуса, входящего в формулы (89) и (92) в первой степени, то отсюда следует, что концы векторов скоростей и ускорений точек одного радиуса будут расположены на прямой (рис. 167). Для удобства выполнения чертежа на радиусе ОМ дано изображение ускорений точек прямой ОМ, а на радиусе  — изображение скоростей.
— изображение скоростей.
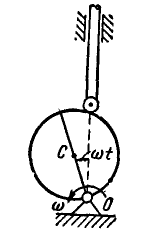
Задача №5
Диск, прикрепленный к вертикальной проволоке, совершает крутильные колебания вокруг оси проволоки так, что угол закручивания его меняется по закону:  , где
, где  выражается в секундах.
выражается в секундах.
Найти нормальное, касательное и полное ускорения какой-либо точки М на ободе диска в момент  , если диаметр диска
, если диаметр диска 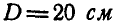 (рис. 168).
(рис. 168).
Указание: находим сначала угловую скорость и угловое ускорение диска по формулам (87) и (90), а затем ускорение точки М по формулам (91) и (92).
Ответ.
Рис. 169.
Задача №6
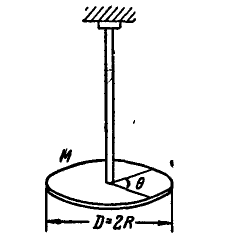
Зубчатое колесо А радиусом  находится во внешнем зацеплении с колесом В радиусом
находится во внешнем зацеплении с колесом В радиусом  (рис. 169). На выступ радиусом
(рис. 169). На выступ радиусом  колеса А намотана нить, к концу которой подвешен груз. Движение груза в сантиметрах и секундах выражается уравнением:
колеса А намотана нить, к концу которой подвешен груз. Движение груза в сантиметрах и секундах выражается уравнением:  Найти угловую скорость и угловое ускорение колеса В, а также полное ускорение точки на ободе этого колеса.
Найти угловую скорость и угловое ускорение колеса В, а также полное ускорение точки на ободе этого колеса.
Решение. В общей точке касания колеса А и В имеют одинаковую линейную скорость, равную  где
где  — угловые скорости колес А и В. Отсюда следует, что
— угловые скорости колес А и В. Отсюда следует, что 
т. е. отношение угловых .скоростей колес обратно пропорционально их радиусам.
Найдем теперь угловую скорость  , и угловое ускорение
, и угловое ускорение  колеса А:
колеса А:

Вращение колес А и В равноускоренное, а поэтому  и
и  откуда
откуда
Отсюда угловая скорость  и угловое ускорение
и угловое ускорение  колеса В:
колеса В:

Ускорение какой-либо точки обода колеса В находим по формуле (92):

Вращение твердого тела вокруг неподвижной оси
Вращением вокруг неподвижной оси называют движение твердого тела, при котором его точки описывают окружности с центрами на одной и той же неподвижной прямой, перпендикулярной к их плоскостям
Вращательное движение
Как было показано, для определения движения твердого тела достаточно определить движение трех его точек, не лежащих на одной прямой. Пусть во- время движения тела две его точки О и O1 остаются неподвижными.
Тогда движение тела можно определить движением третьей точки К, принадлежащей телу и не лежащей на одной прямой с точками О и O1. Выберем эту точку произвольно и, соединив все три точки прямолинейными отрезками, получим треугольник OO1K-Так как точки О и O1 неподвижны, то неподвижна и сторона OO1 треугольника OO1K, и движение точки К, а также и всего тела определится поворотом плоскости треугольника OO1K вокруг прямой OO1. Точку К мы выбрали произвольно, следовательно, поворачивается вокруг прямой OO1 любая плоскость, проведенная в теле через эту прямую. Такое движение тела называют вращательным движением, или, коротко, вращением, а неподвижную прямую OO1, вокруг которой вращается тело, называют осью вращения.
Ось вращения может проходить и за пределами тела. Так, например, Луна, двигаясь вокруг Земли, повернута к ней всегда одной стороной. Движение Луны по отношению к Земле можно назвать вращением. Ось вращения проходит за пределами Луны через центры круговых траекторий ее точек.
Если движение тела определять по движению его точек, то вращение вокруг оси можно определить как движение твердого тела, при котором все точки тела описывают окружности с центрами на одной и той же неподвижной прямой, перпендикулярной к плоскостям этих окружностей, а ось вращения можно определить как неподвижную прямую, на которой расположены центры окружностей, описываемых точками вращающегося тела.
Вращательное движение твердого тела определено, если задан как функция времени угол, на который поворачивается плоскость, проходящая через ось вращения и какую-нибудь точку вращающегося тела: φ=φ(t)
Уравнение вращательного движения. Построим основную систему координат xcyz, направив ось Oz по оси вращения тела (рис. 101). Эта система неподвижная и не связана с вращающимся телом. Построим теперь другую, подвижную, систему координат x’0y’z’, направив ось Oz’ также по оси OO1 вращения тела, а ось Ox’ — на какую-либо точку K1 тела. Эта система координат неизменно связана с телом и поворачивается вместе с ним относительно основной системы xOyz. Угол φ на который поворачивается плоскость, проходящая через ось вращения и какую-нибудь точку вращающегося тела, называют углом поворота и обозначают буквой φ. Так, если в начальное мгновение оси Ox’ и Ox (см. рис. 101) совпадали, то углом поворота мы назовем двугранный угол между неподвижной плоскостью xθz и подвижной плоскостью x’Oz’ или равный ему линейный угол x’Ox’.
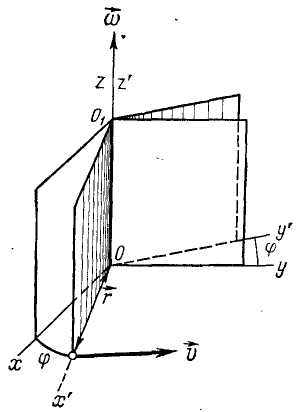
Рис. 101
Угол φ можно рассматривать как угловую координату тела, потому что он определяет положение всего вращающегося тела. Измеряется угол φ в радианах.
Будем считать угол φ положительным, если он отсчитан от положительной оси Ox к положительной оси Оу, т. е. против вращения часовой стрелки, если смотреть с положительного направления оси Oz. При отсчете в противоположную сторону будем считать угол отрицательном.
Чтобы определить вращение тела, надо знать угол поворота как некоторую непрерывную однозначную функцию времени:
Уравнение (82) является уравнением вращательного движения твердого тела вокруг неподвижной оси.
Всякая плоскость OO1K, проведенная через ось вращения и какую-либо точку К тела, поворачивается за данное время на такой же угол φ, на который за это же время повернулась плоскость x’Oz’. Это следует из условия неизменяемости твердого тела.
Угловая скорость выражается первой производной от угла поворота по времени: 
Угловая скорость. Угол поворота характеризует вращение тела только с геометрической стороны. Чтобы охарактеризовать вращение тела не только в пространстве, но и во времени, возьмем отношение изменения ∆φ угла поворота ко времени Δt, в течение которого это изменение происходило, называемое средней угловой скоростью тела:
 (83′)
(83′)
Пределом отношения (83′) при Δt, стремящимся к нулю, является первая производная от угла поворота по времени. Она характеризует изменение угла поворота в данное мгновение, т. е. характеризует вращение тела не только по отношению к окружающему пространству, но и во времени. Эта величина принята за пространственно-временную меру вращения твердого тела вокруг оси и ее называют угловой скоростью тела:
 (83)
(83)
Знак производной (83) указывает, в какую сторону поворачивается тело вокруг оси Oz: если производная (83) положительна, то наблюдатель, смотрящий с положительной стороны оси Oz, видит тело вращающимся против часовой стрелки, т. е. справа налево — от положительного направления оси Ox к положительному направлению оси Оу: при отрицательной производной (83) вращение тела происходит в обратном направлении.
Размерность угловой скорости равна размерности угла поворота, деленной на размерность времени. Но угол поворота является отвлеченной величиной, и размерность его—единица. Следовательно, размерность угловой скорости обратна размерности времени.
Чаще всего время измеряют в секундах, тогда единица угловой скорости ceκ -1 .
Равномерное вращение иногда характеризуют числом п оборотов, совершаемых телом за единицу времени (обычно за минуту).
Найдем соотношение между угловой скоростью ω, выраженной в радианах в секунду, и числом оборотов в минуту. Если тело делает n оборотов в минуту, то оно поворачивается за каждую минуту на 2πn радианов, а за секунду—в 60 раз меньше, следовательно,
 (84)
(84)
Формулу (84) широко применяют в технической механике. Приближенно можно считать
 (84′)
(84′)
В формулах (84) и (84′) n выражеyо в оборотах за минуту, a ω — в радианах за секунду, как их большей частью и выражают. Однако для очень медленно вращающихся тел число оборотов удобнее считать не за минуту, а за другие единицы времени. Так, Земля вращается вокруг своей оси, делая 1 оборот в сутки. Было бы неудобно считать, что Земля делает  оборота в минуту. Угловую скорость Земли следует подсчитывать не по формуле (84), а из тех соображений, что Земля делает один оборот (2π радианов) за сутки, а в сутках 86400 сек, следовательно,
оборота в минуту. Угловую скорость Земли следует подсчитывать не по формуле (84), а из тех соображений, что Земля делает один оборот (2π радианов) за сутки, а в сутках 86400 сек, следовательно,

Самые медленные вращения встречаются в звездном мире. Так -2 .
Чаще всего время измеряется в секундах, тогда единица углового ускорения ceκ -2 , или по записи, рекомендованной ГОСТом, pa∂/ceκ 2 .
Если с течением времени абсолютная величина угловой скорости тела увеличивается, то производная  имеет тот же знак, что и ω, и вращение тела ускоренное. Если же величина угловой скорости с течением времени уменьшается, то производная и угловая скорость имеют различные знаки — вращение тела замедленное. Каждое из этих вращений, и ускоренное и замедленное, называют переменным вращением.
имеет тот же знак, что и ω, и вращение тела ускоренное. Если же величина угловой скорости с течением времени уменьшается, то производная и угловая скорость имеют различные знаки — вращение тела замедленное. Каждое из этих вращений, и ускоренное и замедленное, называют переменным вращением.
Задача №7
Унифиляр (тело, подвешенное на вертикальном стержне) (рис. 102) закрутили на угол  от равновесного положения и затем (в мгновение t = 0) предоставили самому себе, и он стал вращаться согласно уравнению
от равновесного положения и затем (в мгновение t = 0) предоставили самому себе, и он стал вращаться согласно уравнению
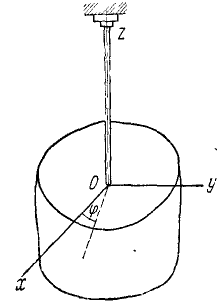
Рис. 102
Определить угловую скорость (в ρa∂/ceκ.) и угловое ускорение (в рад/сек) через каждые 3 сек от начала движения.
Решение. Дифференцируя уравнение движения, получим выражение угловой скорости унифиляра:

Дифференцируя вторично найдем, угловое ускорение унифиляра:

Чтобы определить угол поворота, угловую скорость и угловое ускорение в заданные мгновения, надо в уравнение движения тела и в полученные соотношения подставить t = 3, 6, 9, . и т. д. секунд. Анализируя полученные данные относительно ω и ε, убедимся, что унифиляр совершает крутильные колебания с периодом 18 сек.
Равномерное и равнопеременное вращения
Если угловая скорость ω постоянна, то производная  = 0, и вращение равномерное. Таким образом, при равномерном вращении тела угловое ускорение равно нулю, угловая скорость постоянна, а угол поворота изменяется пропорционально времени:
= 0, и вращение равномерное. Таким образом, при равномерном вращении тела угловое ускорение равно нулю, угловая скорость постоянна, а угол поворота изменяется пропорционально времени:
ε = 0, ω = const, φ = φ0+ωt, (86)
где φ0-начальное значение угла.
Формулы (86) справедливы только для равномерного вращения тела и неприменимы при других движениях.
Из различных переменных вращений тела в задачах наиболее часто встречается равнопеременное вращение. Равнопеременным вращением называют такое вращение твердого тела вокруг оси, πph котором угловое ускорение остается постоянным:
Интегрируя это уравнение, находим
Постоянную интегрирования C1 находим из начальных данных. В начальное мгновение (при t=0) величина угловой скорости была ω0. Подставляя эти частные значения аргумента t и функции ω, находим постоянную C1:
Интегрируя это равенство, получаем
Постоянную C2 находим из начальных данных. Если при начале вращения тело было повернуто на некоторый угол φ0, то, подставляя φ0 вместо φ и 0 вместо t, найдем C2 = φ0. Для равнопеременного вращения тела имеем:
 (87)
(87)
Формулы (87) справедливы только для равнопеременного вращения твердого тела и неприменимы при других движениях.
Задача №8
Барабан суперцентрифуги делает при установившемся движении 30000 об/мин, а после прекращения подачи энергии (на выбеге) вращается равнозамедленно с угловым ускорением ε=π1∕ceκ 2 . Определить время выбега (время до остановки) и угол поворота барабана за это время.
Решение. В мгновение прекращения подачи энергии угловая скорость барабана была
C этого мгновения барабан вращается равнозамедленно по (87):
В мгновение остановки барабана угловая скорость его равна нулю. Подставляя это значение угловой скорости, находим время выбега.
t = 1000 сек = 16 мин 40 сек.
За это время барабан повернется на угол

Чтобы по углу поворота определить число оборотов, надо поделить этот угол (выраженный в радианах) yа 2π—число радианов в одном обороте.
Ответ. t = 16 мин 40 сек, φ = 250 000 об.
Задача №9
В инерционном аккумуляторе Уфимцева (1918 г.) для ветроэлектрических станций стальной диск вращается в глубоком вакууме, делая 20 000 об/мин. Предоставленный самому себе, он продолжает вращаться в течение двух недель. Определить е диска, считая вращение равнозамедленным.
Решение. Определим начальную угловую скорость диска н время (2 нед.) до остановки в секундах:

Ответ получим, разделив ω0 на t.
Ответ. 
Траектории, скорости и ускорения точек вращающегося тела
Точки вращающегося тела, расположенные на одной прямой, параллельной оси вращения, совершают одинаковые движения
Траектории точек вращающегося тела
Вращением тела называют движение, при котором точки тела описывают окружности с центром на оси вращения. Следовательно, по самому определению вращательного движения траектории точек тела—окружности.
Если тело мысленно пересечь какой-либо плоскостью, перпендикулярной оси вращения, то в этой плоскости будут находиться круговые траектории всех расположенных в ней точек тела. Очевидно, что движения точек тела, лежащих на ном в какой-либо из точек к этой плоскости, совершенно одинаковы, а потому и движение точек всего тела может быть полностью охарактеризовано движением точек, лежащих в этой плоскости.
Сохраним и в этом параграфе расположение осей координат (см. рис. 101), при котором оси Oz и Oz’ неподвижной и подвижной систем совпадают с осью вращения тела, а плоскость x’0y’ находится в плоскости хОу.
Возьмем в этом теле какую-либо точку К (рис. 103), координаты которой относительно подвижной системы обозначимx’,y’ и г’. Эти координаты точки К во время вращения тела не меняются, так как оси подвижной системы координат неизменно связаны с телом и вращаются вместе с ним. Координаты той же точки в основной системе обозначим х, у и z.
Координаты х и у точки К связаны с координатами х’ и у’ той же точки формулами, известными из аналитической геометрии и понятными из чертежа (рис. 103):
х = х’ cos φ—y’ sin φ, (88′)
y = x’ sin φ +y’ os φ. (88″)
Если тело вращается, то с течением времени меняется угол φ, являющийся некоторой функцией (71) от времени t, а следовательно, меняются и координаты х и у точки К в основной системе отсчета. Координата же z при направлении оси Oz вдоль оси вращения не изменяется и остается равной z’:
Аналогично можно определить подвижные координаты по неподвижным и углу φ:
х’ = х cos φ у sin φ; y’ = y cos φ—x sinφ; z’ = z.
Скорость точки тела, вращающегося вокруг оси, равна произведению угловой скорости тела на расстояние точки от оси: υ= ωr
Скорости точек вращающегося тела. Для получения проекций скорости на неподвижные оси координат продифференцируем по времени равенства (88), рассматривая φ как функцию времени. Будем иметь


Но согласно (88) выражение, стоящее в скобках в первом из этих равенств, есть у, а во втором х, а потому  (89)
(89)
Возводя эти равенства в квадрат и складывая, найдем

Но в левой части мы имеем квадрат полной скорости точки, а в скобках правой части — квадрат расстояния точки от оси. Мы получили одну из главнейших формул кинематики:
υ = ωr (90)
— величина скорости точки вращающегося тела равна произведению угловой скорости тела на расстояние точки от оси вращения.
Таким образом, для определения скорости точки вращающегося тела нет необходимости знать ее координаты, надо знать лишь расстояние точки от оси вращения и угловую скорость тела.
Можно определить угловую скорость тела по скорости какой-либо из его точек и по расстоянию этой точки от оси вращения:
 (91)
(91)
По этим формулам можно определить скорость любой точки вращающегося тела, независимо от того, какую форму имеет тело и находится точка на поверхности или внутри тела. Скорость точки тела, вращающегося вокруг оси, называют вращательной скоростью точки. Она направлена перпендикулярно к плоскости, проходящей через точку и ось вращения, против хода часовой стрелки или по ходу часовой стрелки в зависимости от знака производной (83).
Если же смотреть на тело с той стороны оси вращения, куда мы направили вектор  угловой скорости, то вектор вращательной скорости
угловой скорости, то вектор вращательной скорости  всякой точки тела направлен против хода часов. Такое же направление (против хода часов) имеет вектор , если смотреть на него с конца вектора вращательной скорости
всякой точки тела направлен против хода часов. Такое же направление (против хода часов) имеет вектор , если смотреть на него с конца вектора вращательной скорости  .
.
Следовательно, вектор вращательной скорости точки и по величине и по направлению можно рассматривать как момент вектора угловой скорости тела относительно этой точки. Его можно представить в виде векторного произведения аналогично тому, как это сделано в статике с моментом силы относительно точки.

Вращательную скорость точек, лежащих на поверхности цилиндра (шкива, барабана, махового колеса, вала и т. п.), вращающегося вокруг своей оси, называют окружной скоростью тела. Окружная скорость равна произведению ω на радиус R тела:
Задача №10
Определить вращательную скорость точек земной поверхности на экваторе и на широте Москвы (55°45′) при вращении Земли вокруг оси (рис. 104). Средний радиус Земли 6371 км и cos 55 o 45′ = 0,5628.
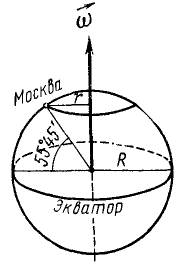
Рис. 104
Решение. Вращаясь вокруг своей оси, Земля совершает один оборот (2π рад) за сутки (86 400 сек), и угловая скорость Земли ω=727∙10 -7 pa∂/ceκ. Умножая угловую скорость на радиус Земли, выраженный в метрах (6371 ∙ 10 3 ), найдем вращательную скорость точек Земли на экваторе:
υ= ωR=727 • 6371 • 10 -4 = 463 м/сек.
Для определения вращательной скорости точек в Москве надо умножить ω Земли на расстояние г от Москвы до земной оси:
υ = 727 • 10 -7 • 0,5628 • 6371 • 10 3 = 261 м/сек.
Ответ. Вращательная скорость точек на экваторе 463 м/сек, в Москве 261 м/сек.
Она направлена против вращения часовой стрелки, если смотреть с северного полюса.
Задача №11
Шкив динамомашины R1= 15 см (рис. 105) вращается посредством бесконечного ремня от паровой машины со шкивом R2 — 60 см, делающим 100 об/мин. Определить угловую скорость ω1 шкива динамомашины.
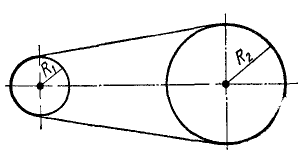
Рис. 105
Решение. Определим окружную скорость шкива паровой машины:

Такова же величина скорости частиц ремня, а следовательно, и окружная скорость шкива динамомашины. Его угловая скорость 
Ответ. ω1=41,87 рад/сек, n = 400 об/мин.
Касательное ускорение точки вращающегося тела равно произведению углового ускорения тела на расстояние точки от оси вращения тела: αr=er
Ускорение точек вращающегося тела
Если в выражении касательного (69) и нормального (74) ускорений вместо скорости v мы подставим выражение (90) вращательной скорости, то получим касательное и нормальное ускорения точки тела, вращающегося вокруг неподвижной оси.
Касательное ускорение точки вращающегося тела равно произведению углового ускорения тела на расстояние точки от оси вращения.
Центростремительное ускорение точки вращающегося тела равно произведению квадрата угловой скорости тела на расстояние точки от оси вращения тела:
αN=ω 2 r
Каждая точка вращающегося тела описывает окружность, а потому радиус кривизны р траектории точки равен расстоянию этой точки от оси вращения тела. Имеем
Нормальное ускорение точки вращающегося тела обычно называют центростремительным ускорением. Оно равно произведению квадрата угловой скорости на расстояние точки от оси вращения тела.
Величина полного ускорения точки тела, вращающегося вокруг оси, выражается формулой 
Зная касательное и центростремительное ускорения, определим по формуле (75) величину полного ускорения этой точки:

 . (94)
. (94)
Иногда бывает необходимо определить проекции ускорения точки вращающегося тела на неподвижные оси координат. Для этого продифференцируем равенства (89) по времени, учитывая, что при вращении тела меняется не только его угловая скорость, но и координаты х и у его точек:
Подставляя вместо υx и υy их значения (89), найдем проекции ускорения точки вращающегося тела на неподвижные оси:
 . (95)
. (95)
Возводя в квадрат и складывая, найдем
a 2 = (x 2 + y 2 ) (ε 2 + ω 4 ),
или, так как x 2 +y 2 = r 2 , получаем уже знакомую нам формулу (94). Следовательно,
Задача №12
Тело вращается вокруг оси Oz без начальной угловой скорости и с постоянным угловым ускорением ε = 0,4 рад/сек 2 . Определить для t = 10 сек: 1) координаты точки К тела, если при t = 0 координаты точки К были: х = +10, y=0, z-0∙, 2) ее вращательную скорость; 3) направляющие косинусы вращательной скорости; 4) касательное и центростремительное ускорения той же точки; 5) направляющие косинусы касательного и центростремительного ускорений; 6) угол, составляемый векторами полного и центростремительного ускорений.
Решение. Тело вращается равноускоренно; по (87) найдем угловое ускорение, угловую скорость и угол поборота тела для заданного мгновения: ε = 0,4 ρaд/ceκ 2 ; ω = 0,4 • 10 = 4 ρaд/ceκ;
Тело повернулось за 10 сек на 20 рад. Переведем радианы в градусы:
за вычетом полных оборотов определим угол αr, составляемый радиусом-вектором с осью Ox (рис. 106):
20 рад = 65 о 54’56»,
По тригонометрическим таблицам находим: cos ar = 0,4080, sin ar = 0,9130. Приняв во внимание, что расстояние точки К от оси вращения тела равно 10 см, найдем координаты точки К в мгновение t=10 сек:
х=10 cos ar = +4,080 см,
y = 10 sin ar = +9,130 см.
Величину вращательной скорости определим по (90):
υ = ωr = 4 • 10 = 40 см/ceκ.
Чтобы определить направляющие косинусы вращательной скорости, найдем сначала по (89) ее проекции на оси координат:
υx= — yω = — 36,52 см/сек,
по затем по (62) — направляющие косинусы:

Определим по (92) величину касательного ускорения:
и по (95′) — проекции касательного ускорения на оси х и у:
aTx = — yε=—3,652 см/сек 2 , aTy = xε =+1,632 см/сек 2 .
Разделив проекции на модуль касательного ускорения, найдем направляющие косинусы касательного ускорения:

Мы видим, что направляющие косинусы касательного ускорения тождественны с направляющими косинусами скорости.
Напомним, что знак направляющего косинуса определяется знаком числителя. Если ω и ε имеют одинаковые знаки (как в данной задаче), то тело вращается ускоренно и направление касательных ускорений его точек совпадает с направлением их скоростей, если же знаки ω и ε различны, то вращение замедленное и векторы касательных ускорений и скоростей точек направлены в противоположные стороны.
Величину центростремительного ускорения определим по (93);
aN=ω 2 r = 4 2 ∙10 = 160 см/сек 2
и по (95′) —его проекции на оси координат:
aNx=—xω 2 = —65,280 см/сек 2 ,
aNy = — yω 2 = —146,080 см/сек 2 .
Проекции нормального ускорения точки на оси координат имеют знаки, обратные знаку соответствующей координаты точки. В самом деле, ayx отрицательна, если абсцисса х положительна, и положительна, если х отрицательна (аналогично и ayy). Следовательно, центростремительное ускорение всегда направлено к началу координат, т. е. к центру круговой траектории точки.
Разделив проекции центростремительного ускорения на его модуль, найдем направляющие косинусы центростремительного ускорения:


Так как касательное ускорение перпендикулярно к центростремительному, то (по условию перпендикулярности, известному из аналитической геометрии) сумма произведений соответствующих направляющих косинусов должна равняться нулю. Действительно,
cos aT cos aN + cos βT cos βN = ( — 0,9130) ( —0,4080) + ( + 0,4080) ( — 0,9130) =0.
Определим теперь тангенс угла между направлением полного и нормального ускорений:
Пользуясь таблицами тригонометрических функций, определим, что угол равен l o 26’0″.
Ответ. 1) х = + 4,080 см, у = + 9,130 см; 2) υ = 40 см/сек, 3)cos aυ=—0,9130, cos βυ = +0.4080; 4) aT = 4 см/сек1, aN= 160 см/сек 2 ; 5) cos aT=—0,9130, cos βT= +0,4080, cos aN = — 0,4080, cos βN=—0,9130; 6) угол равен l o 26’0″.
Задача №13
При сборке ротора молотковой дробилки была допущена неточность, в результате которой центр тяжести ротора отстоит от оси вращения на расстоянии 1 мм. Определить центростремительное ускорение центра тяжести ротора, если n = 3000 об/мин.
Решение. По формулам (84) и (93) имеем

Ответ. aN=98,6 м/сек 2 ≈ 10g.
Зависимости между углом поворота, угловой скоростью, угловым ускорением и временем аналогичны зависимостям между расстоянием, скоростью, касательным ускорением и временем
Аналогия формул
Формулы кинематики вращательного движения аналогичны соответствующим формулам кинематики точки и могут быть из них получены, если заменить расстояние s углом поворота φ, скорость υ— угловой скоростью ω и касательное ускорение αT-угловым ускорением ε. Это правило является мнемоническим, оно непригодно для вывода формул, но может облегчить их запоминание. Ниже приведен ряд формул, получающихся одна из другой такой заменой.
| Движение точки | Вращение точки | |






| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Сферическое движение твердого тела
- Плоско-параллельное движение твердого тела
- Движение твердого тела, имеющего неподвижную точку
- Движение твердого тела
- Теория пар, не лежащих в одной плоскости
- Произвольная пространственная система сил
- Центр параллельных сил и центр тяжести
- Поступательное движение твердого тела
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Уравнения фигур вращения вокруг оси
Глава VI. Простейшие криволинейные поверхности и тела вращения.
§ 75*. Поверхности вращения
1. Пусть в плоскости р задана кривая L и некоторая прямая l. Поверхность, которая получается вращением кривой L вокруг прямой l, называется поверхностью вращения.
Пусть кривая L лежит в плоскости хОу (рис. 216) и имеет уравнение
y = f(x), х  [а; b]. (1)
[а; b]. (1)
Найдем уравнение поверхности, которая получится вращением кривой L вокруг оси Ох (рис. 217).
Очевидно, точка M с координатами (х; у; z), где х [а; b], принадлежит искомой поверхности вращения тогда и только тогда, когда
Действительно, точки (х; у; z) и (х; f(x); 0) лежат на одной окружности с центром в точке (х; 0; 0).
Таким образом, уравнение поверхности, полученной вращением кривой (1) вокруг оси Ох, имеет вид
y 2 + z 2 = (f(x)) 2 , х [а; b]. (2)
Заметим, что уравнение (2) получается из уравнения (1) следующим образом:
обе части уравнения (1) возводятся в квадрат и y 2 заменяется на y 2 + z 2 ,
В частности, если кривая L задана уравнением
то уравнение поверхности, полученной вращением этой кривой вокруг оси Ох, имеет вид
т. е. просто y 2 заменяем на y 2 + z 2 .
2. Поверхность, которая получается вращением эллипса вокруг одной из его осей, называется эллипсоидом вращения.
Пусть в плоскости хОу эллипс задан уравнением
 (5)
(5)
Составим уравнение поверхности, полученной вращением его вокруг оси Ох. Уравнение эллипса (5) приводится к виду (3), следовательно, для получения уравнения эллипсоида вращения достаточно в уравнении (5) y 2 заменить на y 2 + z 2 . После замены получим
 (6)
(6)
Это уравнение обычно записывают так:
При а > b уравнение (6) определяет эллипсоид вращения, вытянутый вдоль оси Ох (рис. 218), при а 2 на y 2 + z 2 , получим искомое уравнение эллипсоида вращения:

3. Поверхность, которая получается вращением гиперболы вокруг одной из ее осей, называется гиперболоидом вращения. При вращении гиперболы вокруг ее действительной оси получается двуполостный гиперболоид вращения (рис. 220), а при вращении гиперболы вокруг ее мнимой оси получается однополостный гиперболоид вращения (рис. 221).
Пусть в плоскости хОу гипербола задана уравнением
 (7)
(7)
Составим уравнение поверхности, полученной вращением гиперболы вокруг ее действительной оси Ох. Уравнение гиперболы (7) приводится к виду (3); следовательно, для получения уравнения поверхности двуполостного гиперболоида вращения достаточно в уравнении гиперболы (7) y 2 заменить на y 2 + z 2 . После замены получим
 (8)
(8)
При вращении гиперболы (7) вокруг ее мнимой оси нужно в уравнении (7) x 2 заменить на x 2 + z 2 ; после замены получим
 (9)
(9)
Задача 2. Гипербола с полуосями а = 3 и b = 4 вращается вокруг своей мнимой оси, совпадающей с осью Оу. Центр гиперболы совпадает с началом координат. Составить уравнение поверхности, полученной при вращении этой гиперболы.
Составим уравнение гиперболы:
Чтобы получить уравнение гиперболоида вращения, в уравнении гиперболы x 2 заменим на x 2 + z 2 . После замены получим

4. Поверхность, которая получается вращением параболы вокруг ее оси симметрии, называется параболоидом вращения (рис. 222).
Пусть на плоскости хОу парабола задана уравнением
Для получения уравнения поверхности вращения нужно в уравнении (10) x 2 заменим на x 2 + z 2 ; после замены получим
Отметим одно замечательное свойство этой поверхности. Если внутреннюю поверхность параболоида вращения сделать зеркальной, а в ее фокусе (фокусом параболоида вращения называется фокус вращаемой параболы) поместить источник света, то все лучи света, отражаясь от поверхности параболоида, пойдут параллельно оси параболоида.
Это свойство широко используется при изготовлении светоотражающих устройств (прожекторов, фар автомобиля, кинопроекторов и других приборов).
Задача 3. Составить уравнение поверхности, полученной вращением параболы y 2 = 2х вокруг оси Ох.
Чтобы составить уравнение параболоида вращения, полученного вращением параболы вокруг оси Ох, нужно в уравнении y 2 = 2х заменить y 2 на y 2 + z 2 , после замены получим
5. Если вращать прямую, параллельную какой-либо оси координат, вокруг этой оси, то получится круговая цилиндрическая поверхность.
Пусть дана прямая, лежащая в плоскости yOz и имеющая уравнение у = а. Легко видеть, что поверхность вращения этой прямой вокруг оси Oz имеет уравнение
Эта цилиндрическая поверхность изображена на рис. 223.
Задача 4. Составить уравнение цилиндрической поверхности, полученной вращением прямой у = 3, лежащей в плоскости хОу вокруг оси Ох.
В уравнении y 2 = 3 2 заменим y 2 на y 2 + z 2 , в результате получим
6. Пусть дана прямая, лежащая в плоскости yOz и проходящая через начало координат:
y = kz, k =/= 0.
Очевидно, уравнение поверхности вращения этой прямой вокруг оси Oz имеет вид
Полученное уравнение является уравнением искомой поверхности вращения, которая называется круговой конической поверхностью (рис. 224).
Задача 5. Составить уравнение поверхности вращения прямой 2х = 3у, z =0 вокруг оси Ох.
Из уравнения 3у = 2х, используя формулу (2), находим 9(y 2 + z 2 ) = 4x 2 . Это и есть искомое уравнение.
Тела вращения
Тела вращения — это объёмные тела, возникающие при вращении плоской геометрической фигуры, ограниченной кривой, вокруг оси, лежащей в той же плоскости. Шар — образован полукругом, вращающимся вокруг диаметра разреза.
Содержание:
Понятие о поверхностях и телах вращения
Если многоугольник ABCDE вращается вокруг прямой АВ (рис. 2.257), то каждая его точка, не принадлежащая прямой АВ, описывает окружность с центром на этой прямой. Весь многоугольник ABCDE при этом описывает некоторое тело вращения (рис. 2.258); прямая АВ — ось этого тела.

Плоскость, проходящая через ось тела вращения, является его плоскостью симметрии. Таких плоскостей каждое тело вращения имеет бесконечно много.
Любая плоскость, проходящая через ось тела вращения, пересекает это тело. Полученное сечение называют осевым сечением. В частности, осевое сечение тела вращения может состоять из двух изолированных друг от друга плоских фигур, симметричных относительно оси (рис. 2.259). Все осевые сечения тела вращения равны.
Чтобы задать тело вращения, достаточно указать его ось и фигуру, вращением которой получено данное тело. Описывая такое тело словесно, вместо оси иногда указывают принадлежащий ей отрезок. Например, вместо «тело, образованное вращением треугольника вокруг оси, содержащей его сторону» говорят и короче: «тело, образованное вращением треугольника вокруг его стороны».
Цилиндр
Можно дать определение цилиндра.
Определение. Цилиндром (точнее, круговым цилиндром) называют тело, которое состоит из двух кругов, совмещаемых параллельным переносом, и всех отрезков, соединяющих соответствующие точки этих кругов. Круги называют основаниями цилиндра, а отрезки, соединяющие соответствующие точки окружностей кругов — образующими цилиндра (рис. 2.260, 2.261).
Можно доказать, что основания цилиндра равны и лежат в параллельных плоскостях, что у цилиндра образующие параллельны и равны. Поверхность цилиндра состоит из оснований и боковой поверхности. Боковая поверхность составлена из образующих.

Определение. Цилиндр называют прямым, если его образующие перпендикулярны плоскостям оснований.
На рисунке 2.261 изображен наклонный цилиндр, а на рис. 2.260 — прямой. В школьном курсе, как правило, рассматривают только прямые цилиндры, называя их для краткости просто цилиндрами.
Цилиндр можно рассматривать как тело, полученное при вращении прямоугольника вокруг одной из его сторон как оси (рис. 2.262).
Радиусом цилиндра называют радиус его основания. Высотой цилиндра называют расстояние между плоскостями оснований. Осью цилиндра называют прямую, проходящую через центры оснований. Ось цилиндра параллельна образующим.
Сечение цилиндра плоскостью, проходящей через ось цилиндра, называют осевым сечением цилиндра (рис. 2.263). Именно через такое сечение обозначают цилиндр. Плоскость, проходящая через образующую прямого цилиндра и перпендикулярная осевому сечению, проведенному через эту образующую, называется касательной плоскостью цилиндра (рис. 2.264).

Плоскость, перпендикулярная оси цилиндра, пересекает его боковую поверхность по окружности, равной окружности основания.
На рисунке 2.265 изображено сечение цилиндра плоскостью, параллельной его оси. Оно представляет собой прямоугольник.
Если цилиндр  с радиусом основания
с радиусом основания  разрезать по образующей
разрезать по образующей  (рис. 2.266) и развернуть на плоскости, получится прямоугольник, стороны которого — спрямленная окружность основания
(рис. 2.266) и развернуть на плоскости, получится прямоугольник, стороны которого — спрямленная окружность основания  и образующая
и образующая  — развертка боковой поверхности цилиндра. Чтобы получить развертку полной поверхности, надо присоединить два круга — основания цилиндра (рис. 2.267).
— развертка боковой поверхности цилиндра. Чтобы получить развертку полной поверхности, надо присоединить два круга — основания цилиндра (рис. 2.267).

Призма, вписанная в цилиндр и описанная около него
При решении геометрических задач часто приходится рассматривать комбинации многогранников и цилиндров, в частности, призм, вписанных в цилиндр и описанных около цилиндра.
Определение. Призмой, вписанной в цилиндр, называют такую призму, основания которой — равные многоугольники, вписанные в основания цилиндра. Ее боковые ребра являются образующими цилиндра (рис. 2.268).
Определение. Призму называют описанной около цилиндра, если ее основания — равные многоугольники, описанные около основания цилиндра. Плоскости ее граней касаются боковой поверхности цилиндра (рис. 2.269).

Пример:
В цилиндр вписана правильная шестиугольная призма. Найдите угол между диагональю ее боковой грани и осью цилиндра, если радиус основания равен высоте цилиндра.
Решение:
Из условия задачи имеем (рис. 2.270):
1. В цилиндр вписана правильная шестиугольная призма.
2. Радиус основания цилиндра равен высоте призмы 

3. Требуется найти угол между 
4.  (1, свойства правильного шестиугольника, вписанного в окружность).
(1, свойства правильного шестиугольника, вписанного в окружность).
5.  — квадрат (1, 4, определение квадрата).
— квадрат (1, 4, определение квадрата).
Надо найти угол между Как это сделать? Лучше всего рассмотреть осевое сечение призмы, изображенное на рисунке 2.271. Задача сводится к нахождению угла  .
.
6.  = 45° (найдите самостоятельно).
= 45° (найдите самостоятельно).
Конус
Определение. Конусом (точнее, круговым конусом) называют тело, которое состоит из круга — основания конуса, точки, не лежащей в плоскости этого круга, — вершины конуса и всех отрезков, соединяющих вершину конуса с точками основания. Отрезки, соединяющие вершину конуса с точками окружности основания, называют образующими конуса (рис. 2.272).

Поверхность конуса состоит из основания и боковой поверхности.
Определение. Конус называется прямым, если прямая, соединяющая вершину конуса с центром основания, перпендикулярна плоскости основания (рис. 2.272).
На рисунке 2.273 изображен наклонный конус, в дальнейшем будет рассматриваться только прямой конус, называемый для краткости просто конусом.
Прямой круговой конус можно рассматривать как тело, полученное при вращении прямоугольного треугольника вокруг его катета как оси (рис. 2.274).
Определение. Высотой конуса называют перпендикуляр, опущенный из его вершины на плоскость основания.
У прямого конуса основание высоты совпадает с центром основания (рис. 2.272). Осью прямого конуса называется прямая, содержащая его высоту. У наклонного конуса основание высоты может не совпадать с центром круга, лежащего в основания конуса (рис. 2.273).
Если конус РАВ с радиусом основания  и образующей
и образующей  (рис. 2.275) разрезать по образующей РВ и развернуть на плоскости, то получим развертку.
(рис. 2.275) разрезать по образующей РВ и развернуть на плоскости, то получим развертку.

Развертка конуса будет состоять из сектора ВРАВ и круга (основания) диаметра 
Сечение конуса плоскостью, проходящей через его ось, называют осевым сечением. Плоскость, проходящая через образующую конуса и перпендикулярная осевому сечению, проведенному через эту образующую, называется касательной плоскостью конуса (рис. 2.276).
Плоскость, перпендикулярная оси конуса, пересекает конус по кругу, а боковую поверхность — по окружности с центром на оси конуса.

Плоскость, перпендикулярная оси конуса, отсекает от него меньший конус. Оставшуюся часть называют усеченным конусом (рис. 2.277).
Усеченный конус можно получить и как тело вращения.
Определение. Усеченным конусом называют тело вращения, образованное вращением прямоугольной трапеции около боковой стороны, перпендикулярной основаниям.
Круги О и  — его основания (рис. 2.277), его образующие равны между собой, прямая
— его основания (рис. 2.277), его образующие равны между собой, прямая  — ось, отрезок — высота. Его осевое сечение
— ось, отрезок — высота. Его осевое сечение  — равнобедренная трапеция.
— равнобедренная трапеция.
Пример:
Конус пересечен плоскостью, параллельной основанию, на расстоянии d от вершины. Найдите площадь сечения, если радиус основания конуса R, а высота Н.
Решение:
Из условия задачи имеем:
1. Конус с вершиной S.
2. 
4. OA = R. (рис. 2.278)
5. Плоскость  пересекает конус и параллельна основанию.
пересекает конус и параллельна основанию.
6. Найдите площадь сечения конуса.
7. Сечение конуса получается из основания конуса преобразованием гомотетии относительно вершины конуса с коэффициентом гомотетии  (1, 2, 3, 4, 5, определение гомотетии).
(1, 2, 3, 4, 5, определение гомотетии).
8. Радиус круга в сечении  (7).
(7).
9. Площадь сечения  (8, теорема о площади круга).
(8, теорема о площади круга).
Пирамида, вписанная в конус и описанная около него
Определение. Пирамидой, вписанной в конус, называют такую пирамиду, основание которой есть многоугольник, вписанный в окружность основания конуса, а вершиной является вершина конуса. Боковые ребра пирамиды, вписанной в конус, являются образующими конуса (рис. 2.279).


Определение. Пирамиду называют описанной около конуса, а конус — вписанным в пирамиду, если ее основанием является многоугольник, описанной около основания конуса, а вершина совпадает с вершиной конуса. Плоскости боковых граней описанной пирамиды являются касательными плоскостями конуса (рис. 2.280).
Определение. Шаром называют тело, которое состоит из всех точек пространства, находящихся на расстоянии, не большем данного, от данной точки. Эту точку называют центром шара, а данное расстояние — радиусом шара (рис. 2.281).

Границу шара называют шаровой поверхностью или сферой. На рисунке 2.281 точки А, В и D принадлежат сфере, а, например, точка М ей не принадлежит. Таким образом, точками сферы являются все точки шара, которые удалены от центра на расстояние, равное радиусу. Любой отрезок, соединяющий центр шара с точкой шаровой поверхности, также называют радиусом.
Отрезок, соединяющий две точки шаровой поверхности и проходящий через центр шара, называют диаметром. Концы любого диаметра называют диаметрально противоположными точками шара.
Шар так же, как цилиндр и конус, является телом вращения. Он получается при вращении полукруга вокруг его диаметра, как оси (рис. 2.282).
Теорема 62. Всякое сечение шара плоскостью есть круг. Центр этого круга есть основание перпендикуляра, опущенного из центра шара на секущую плоскость.
Если шар с центром О и радиусом R пересечен плоскостью  , то в сечении по теореме 62 получается круг радиуса
, то в сечении по теореме 62 получается круг радиуса  с центром К (рис. 2.283).
с центром К (рис. 2.283).

Радиус сечения шара плоскостью можно вычислить по формуле

Из формулы видно, что плоскости, равноудаленные от центра, пересекают шар по равным кругам. Радиус сечения шара тем больше, чем ближе секущая плоскость к центру шара, т. е. чем меньше расстояние ОК. Наибольший радиус имеет сечение плоскостью, проходящей через центр шара. Радиус этого круга равен радиусу шара.
Плоскость, проходящую через центр шара, называют диаметральной плоскостью. Сечение шара диаметральной плоскостью называют большим кругом, а сечение сферы — большой окружностью.
Теорема 63. Любая диаметральная плоскость шара является его плоскостью симметрии. Центр шара является его центром симметрии.
Плоскость, проходящую через точку А шаровой поверхности и перпендикулярную радиусу, проведенному в точку А, называют касательной плоскостью. Точку А называют точкой касания (рис. 2.284).
Теорема 64. Касательная плоскость имеет с шаром только одну общую точку — точку касания.
Прямую, проходящую через точку А шаровой поверхности перпендикулярно к радиусу, проведенному в эту точку, называют касательной (рис. 2.285).

Теорема 65. Через любую точку шаровой поверхности проходит бесконечно много касательных, причем все они лежат в касательной плоскости шара.
Пример:
Через середину радиуса шара проведена перпендикулярная радиусу плоскость. Как относится площадь полученного сечения к площади большого круга?
Решение:
Из условия задачи имеем:
1. Шар с центром О и радиусом R, ОС = OA = R.
2. ОВ = ВС =  .
.
3. СО перпендикулярен плоскости окружности с центром в точке В.
4. Найдите отношение площади круга с центром в точке В к площади большого круга.
Чтобы решить задачу, надо знать радиус получающегося в сечении круга с центром в точке В. Как его найти?
5.  — прямоугольный (3, определение перпендикуляра к плоскости).
— прямоугольный (3, определение перпендикуляра к плоскости).
6. Если радиус шара R, то радиус круга в сечении будет 
7. Отношение площади этого круга к площади большого круга равно  (1, 2, 5, теорема Пифагора).
(1, 2, 5, теорема Пифагора).
Части шара и сферы
В геометрии существуют специальные названия частей сферы и шара, которые получаются при разбиении этих фигур на части отрезками, прямыми или плоскостями.
Определение. Часть шара, отсекаемую плоскостью, называют шаровым сегментом.
Шаровой сегмент ограничен: 1) частью сферы, которую называют сегментной поверхностью; 2) кругом, который называют основанием шарового сегмента.
На рис. 2.287 плоскость  , проходящая через точку В, отсекает от шара два шаровых сегмента.
, проходящая через точку В, отсекает от шара два шаровых сегмента.
Определение. Сферическим сегментом называют часть сферы, отсекаемую плоскостью.
Окружность, по которой плоскость пересекает сферу, называют основанием сферического сегмента.
Высотой шарового сегмента и сегментной поверхности называют отрезок радиуса, перпендикулярного к основанию сегмента. На рисунке 2.287 верхний сегмент имеет высоту АВ.
Если пересечь шар двумя параллельными плоскостями, тогда шар (его граничная сфера) разделится на три части, две из них — шаровые (сферические) сегменты.
Определение. Часть шара, заключенную между двумя пересекающими его параллельными плоскостями, называют шаровым слоем.

На рисунке 2.288 две параллельные плоскости, проходящие через точки СВ, отсекают от шара шаровой слой.
Определение. Сферическим поясом называют часть сферы, заключенную между двумя ее параллельными сечениями.
Поверхность шарового слоя состоит из двух кругов, называемых основаниями шарового слоя, и сферического пояса соответственно.
Высотой шарового слоя называют перпендикуляр, проведенный из точки одного основания к плоскости другого; чаще всего берут за высоту отрезок диаметра сферы, перпендикулярного основаниям, с концами на них. Высотой сферического пояса называют высоту соответствующего шарового слоя. На рисунке 2.288 высотой шарового слоя является отрезок ВС.
Сферический сегмент и сферический пояс можно рассматривать как поверхности, образованные вращением некоторых дуг окружности вокруг прямой АВ (рис. 2.288).
Шаровой сектор — это часть шара, получаемая не простым сечением шара плоскостью (или плоскостями), а как фигура, образованная при вращении соответствующего кругового сектора (рис. 2.289).

Определение. Шаровым сектором называют фигуру, полученную при вращении кругового сектора с углом, меньшим 90°, вокруг прямой, содержащей один из ограничивающих круговой сектор радиусов.
Шаровой сектор состоит из шарового сегмента и конуса. На рисунке 2.290 изображен круговой сектор СО А (О — центр данного круга). Вращая круговой сектор СО А вокруг радиуса АО, получим шаровой сектор с центром в точке О (рис. 2.290). Полученный шаровой сектор состоит из шарового сегмента высотой Н и конуса с вершиной в точке О и высотой R — Н.
Эта лекция взята со страницы полного курса лекций по изучению предмета «Математика»:
Смотрите также дополнительные лекции по предмету «Математика»:
http://oldskola1.narod.ru/Jakovlev/Jakovlev075.htm
http://natalibrilenova.ru/tela-vrascheniya/