Понятие о равноускоренном движении. Формулы перемещения и скорости. Равноускоренное вращение
Движение с ускорением различных объектов окружает нас каждый день. Достаточно лишь вспомнить автомобили, самолеты, велосипеды, вращающиеся колеса и валы, чтобы понять всю важность ускоренного перемещения тел в жизни человека. Для описания этого движения в физике существует специальный раздел, он называется кинематикой. В данной статье рассмотрим, какими формулами описывается перемещение при равноускоренном движении.
Понятие об ускорении, скорости и пути
 Вам будет интересно: «Тлетворный» — это о разложении
Вам будет интересно: «Тлетворный» — это о разложении
Прежде чем записывать формулы перемещения при равноускоренном движении, следует дать понятие основным величинам, которые в них фигурируют.
Начнем с пути. Под этой величиной понимают расстояние, которое проходит тело за интервал времени, двигаясь по известной траектории. Чем за более короткое время тело проходит некоторый путь L, тем больше его скорость. Таким образом, скоростью тела является быстрота преодоления им расстояний в пространстве. В данный момент времени расчет скорости выполняют по такой формуле:
Скорость — это вектор, а путь — скаляр. Скорость направлена вдоль касательной, восстановленной к данной точке траектории.
Если наблюдать за телом, движущимся вдоль траектории некоторое время, и в каждой точке траектории измерять его скорость, то окажется, что она постоянно меняется. Изменение скорости характеризуют ускорением. В соответствии с определением ускорения оно вычисляется так:
Ускорение также является величиной векторной, только с направлением скорости оно не имеет ничего общего. Вектор ускорения повернут в сторону изменения скорости за данное время или, что одно и то же, в сторону действующей на тело силы.
Равноускоренное движение в физике
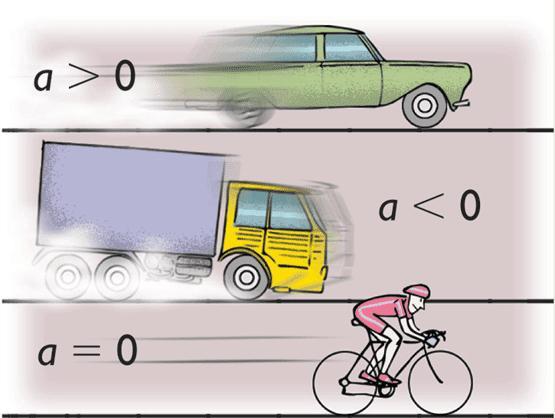
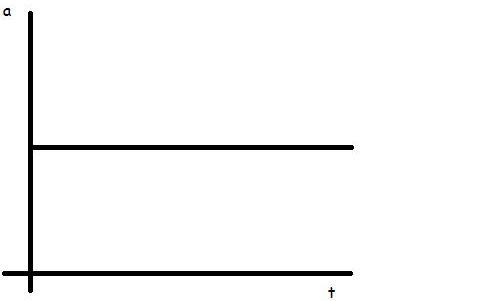
Чтобы понять, что такое равноускоренное перемещение, приведем следующий пример: предположим, что автомобиль находился в покое. Затем он начал движение, постоянно увеличивая свою скорость. Если за равные промежутки времени прирост модуля скорости автомобиля был одинаковым, то можно говорить о равноускоренном движении тела. Иными словами, во время рассматриваемого вида перемещения ускорение является величиной постоянной (a = const).
Не стоит думать, что движение с постоянным ускорением может только увеличивать скорость. В результате такого перемещения скорость тела может также уменьшаться до полной его остановки. Такая ситуация возникает, когда транспортное средство осуществляет процесс торможения. В этом случае ускорение будет направлено против вектора скорости.
В природе распространенным движением с постоянным ускорением является падение тел. До определенных скоростей, когда сопротивлением воздуха можно пренебречь, свободное падения является равноускоренным, причем величина ускорения равна 9,81 м/с2.
Изменение скорости при движении с постоянным ускорением
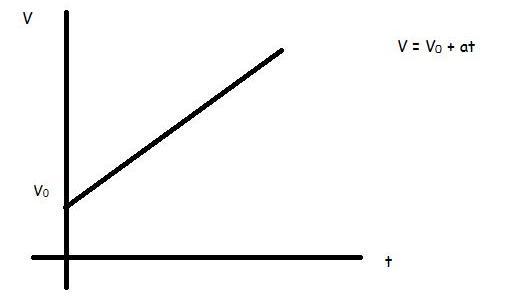
В отличие от ускорения, скорость при равноускоренном движении постоянной величиной не является. Рассмотрим для простоты перемещение по прямой линии. В случае если вектора величин a¯ и v¯ совпадают, имеет место следующая формула для скорости:
Это выражение предполагает, что до появления ускорения тело уже обладало некоторой скоростью v0.
Данная формула показывает, что скорость линейно возрастает с течением времени. График функции v(t) представляет собой прямую линию, которая пересекает ось y на расстоянии v0 от начала координат.
При равноускоренном движении скорость также может уменьшаться линейно. Для этого необходимо, чтобы вектора ускорения и скорости были противоположными (торможение автомобиля, свободный взлет тела в высоту). Для этого случая можно записать такое выражение:
Как и в предыдущем случае, графиком равенства является прямая, только коэффициент ее наклона к оси x будет не положительным, а отрицательным.
Перемещение при равноускоренном движении
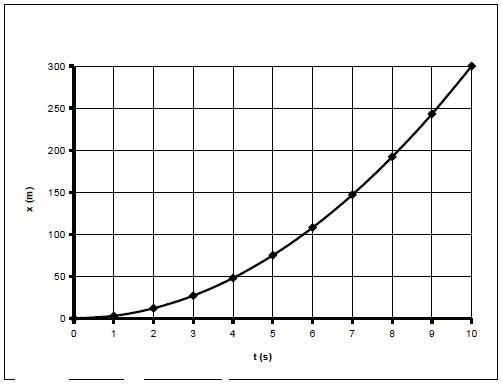
Формула пути однозначно получается, если взять интеграл по времени от скорости. В случае когда скорость тела увеличивается, для пути можно записать следующее выражение:
Видно, что графиком функции L(t) является парабола (ее правая ветвь). То есть пройденный путь с течением времени быстро увеличивается.
Если ускорение приводит к уменьшению скорости, тогда формула перемещения при равноускоренном движении примет вид:
Графиком для этого уравнения тоже будет парабола, однако ее ветвь постепенно приближается к некоторому постоянному значению. Последнее соответствует пройденному пути до остановки движущегося тела.
Движение с постоянным ускорением по окружности
Чтобы полнее охарактеризовать тему, следует также привести формулы перемещения при равноускоренном движении по окружности. В отличие от прямолинейного движения, этот вид перемещения описывается угловыми величинами. Тем не менее угловые величины являются полными аналогами соответствующих линейных характеристик.
Для скорости при равноускоренном движении вращения справедлива формула:
Здесь ω — скорость угловая, которая измеряется в радианах в секунду (рад/с), α — ускорение угловое, оно измеряется в рад/с2.
Аналогом пути для вращения является угол поворота θ. Для него справедлива формула:
Таким образом, при равноускоренном вращении формулы кинематики сохраняют свой вид, но в них стоят уже угловые физические величины.
Кинематика вращательного движения
Вы будете перенаправлены на Автор24
Если все точки тела совершают движения по окружностям, при этом все центры данных окружностей находятся на одной прямой, тогда такое движение тела (системы) называют вращением. При этом ось, на которой находятся центры окружностей, получила название оси вращения:
- ее положение может быть внутри тела (системы) или вне его;
- она может двигаться или быть неподвижной;
- плоскости траекторий движения точек тела перпендикулярны оси вращения;
- в трехмерном пространстве каждое вращение обладает осью вращения (теорема Эйлера).
Угловая скорость
Допустим, что некоторое твердое тело совершает вращения вокруг неподвижной оси. В таком движении точки данного тела описывают окружности. Центы этих окружностей принадлежат оси вращения, радиусы их различны.
Рассмотрим одну точку нашего тела. Пусть она перемещается по окружности, радиус которой равен $R$ (рис.1).
Рисунок 1. Угловая скорость. Автор24 — интернет-биржа студенческих работ
Положение, рассматриваемой точки будем задавать при помощи угла поворота $\Delta \varphi$.
Элементарно малые углы поворота можно рассматривать как векторы. При этом величина вектора $d\vec \varphi$ равна величине угла поворота $\Delta \varphi$ (рис.1).
Направление $d\vec \varphi$ подчинено правилу правого буравчика, то есть направлено вдоль направления поступательного перемещения острия винта, при вращении его головки, совпадающем с направлением вращения точки по ее окружности.
$d\vec \varphi$ называют аксиальным вектором (псевдовектором). Псевдо векторы не имеют точки приложения, их изображают в любой точке на оси вращения.
Готовые работы на аналогичную тему
$\vec \omega$ — угловая скорость.
Вектор $\omega$ направлен по оси вращения (правило правого винта), и совпадает по направлению с элементарным углом поворота $d\vec \varphi$ (рис.1).
Единица $\omega$ — это радиан, деленный на секунду (рад/с).
Линейную скорость нашей материальной точки можно связать с угловой скоростью, эту связь легко установить, рассматривая рис.1.
Мы получили, линейная скорость по величине равна:
В виде вектора линейная скорость материальной точки, определяется так:
$\vec v = \vec \omega \times \vec R (3),$
где $R$ — радиус окружности.
Из формулы (3) следует, что величина линейной скорости равна:
$v=\omega \times R sin (\alpha )(4),$
где $\alpha$ — угол между векторами $\vec \omega$ и $\vec R$.
Направление результата векторного произведения в (4) определяет правило правого винта. Головку винта вращают от $\vec \omega$ к $\vec R$, поступательное перемещение острия указывает направление $\vec v$.
При постоянной угловой скорости вращение называют равномерным.
Период вращения
Для характеристики равномерного вращения вводят такую физическую величину, как период вращения $T$.
Периодом вращения называют время, равное времени полного оборота точки на угол в $360^0 C$:
Величину, обратную периоду вращения называют частотой ($\nu$):
$\omega = 2\pi \nu (7).$
Угловое ускорение
Угловым ускорением называют вектор, равный:
или второй производной от угла поворота:
При движении по окружности вектор $\omega$ изменяется только по величине, не изменяя своего направления. В этом случае полное ускорение материальной точки можно найти, применяя выражение (3) и (8) как:
$\vec \varepsilon= \frac
Если тело совершает вращения около неподвижной оси, то $\vec \varepsilon$ имеет направление вдоль оси вращения тела.
Если угловая скорость вращения тела увеличивается (вращение ускоренное), то вектор углового ускорения и вектор угловой скорости сонаправлены.
При замедленном вращении векторы углового ускорения и угловой скорости имеют противоположные направления.
Тангенциальная и нормальная компоненты линейного ускорения
По определению, составляющая линейного ускорения ($a_<\tau>$), которая отвечает за изменение величины скорости движения тела (тангенциальное ускорение) равна:
Принимая во внимание выражение (2), мы получим:
Ускорение, отвечающее за изменение направления скорости движения при криволинейном перемещении – это нормальное (или центростремительное ускорение) ($a_n$) равно:
Использовав формулу (2), имеем:
Мы получили связи между линейными параметрами движения:
- длиной пути ($s$) пройденным, материальной точкой по дуге окружности радиуса $R$;
- линейной скоростью перемещения точки $v$;
- тангенциальным ускорением $a_<\tau>$;
- нормальным ускорением $a_n$
и угловыми величинами:
- углом поворота $\varphi$;
- угловой скоростью $\omega$;
- угловым ускорением $varepsilon$.
$s=R\Delta \varphi$, $v=R\omega$, $a_<\tau>=R\varepsilon$, $a_n=\omega^2R.$
Вращение с постоянным угловым ускорением
Если вращение материальной точки происходит с постоянным угловым ускорением ($\varepsilon = const$,), то его называют равнопеременным.
В таком случае это движение можно описывать при помощи следующих уравнений. Для угловой скорости имеют место равенства:
$\omega = \omega _0+\varepsilon t (13) $
при вращении с положительным ускорением (равноускоренное движение) и
$\omega = \omega _0-\varepsilon t (14) $
при равнозамедленном вращении. В формулах (13) и (14) $\omega_0$ — начальная скорость вращения.
Угол поворота материальной точки при равноускоренном движении задает формула:
$\varphi= \varphi_0 + \omega _0 t +\frac<\varepsilon t^2> <2>(15)$
при равноускоренном движении
$\varphi= \varphi_0 + \omega _0 t — \frac<\varepsilon t^2> <2>(16)$
при равнозамедленном движении. В уравнениях (15) и (16) $\varphi_0 $ — начальный угол поворота.
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 08 05 2021
Равноускоренное движение: формулы, примеры
Равноускоренное движение
Равноускоренное движение — это движение, при котором вектор ускорения не меняется по модулю и направлению. Примеры такого движения: велосипед, который катится с горки; камень брошенный под углом к горизонту. Равномерное движение — частный случай равноускоренного движения с ускорением, равным нулю.
Рассмотрим случай свободного падения (тело брошено под уголом к горизонту) более подробно. Такое движение можно представить в виде суммы движений относительно вертикальной и горизонтальной осей.
В любой точке траектории на тело действует ускорение свободного падения g → , которое не меняется по величине и всегда направлено в одну сторону.
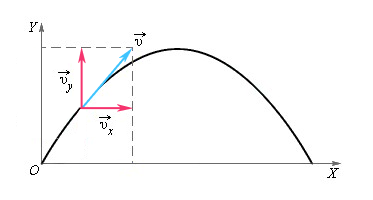
Вдоль оси X движение равномерное и прямолинейное, а вдоль оси Y — равноускоренное и прямолинейное. Будем рассматривать проекции векторов скорости и ускорения на оси.
Формулы для равноускоренного движения
Формула для скорости при равноускоренном движении:
Здесь v 0 — начальная скорость тела, a = c o n s t — ускорение.
Покажем на графике, что при равноускоренном движении зависимость v ( t ) имеет вид прямой линии.
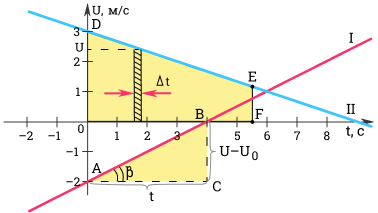
Ускорение можно определить по углу наклона графика скорости. На рисунке выше модуль ускорения равен отношению сторон треугольника ABC.
a = v — v 0 t = B C A C
Чем больше угол β , тем больше наклон (крутизна) графика по отношению к оси времени. Соответственно, тем больше ускорение тела.
Для первого графика: v 0 = — 2 м с ; a = 0 , 5 м с 2 .
Для второго графика: v 0 = 3 м с ; a = — 1 3 м с 2 .
По данному графику можно также вычислить перемещение тела за время t . Как это сделать?
Выделим на графике малый отрезок времени ∆ t . Будем считать, что он настолько мал, что движение за время ∆ t можно считать равномерным движением со скоростью, равной скорости тела в середине промежутка ∆ t . Тогда, перемещение ∆ s за время ∆ t будет равно ∆ s = v ∆ t .
Разобьем все время t на бесконечно малые промежутки ∆ t . Перемещение s за время t равно площади трапеции O D E F .
s = O D + E F 2 O F = v 0 + v 2 t = 2 v 0 + ( v — v 0 ) 2 t .
Мы знаем, что v — v 0 = a t , поэтому окончательная формула для перемещения тела примет вид:
s = v 0 t + a t 2 2
Для того, чтобы найти координату тела в данный момент времени, нужно к начальной координате тела добавить перемещение. Изменение координаты в зависимости от времени выражает закон равноускоренного движения.
Закон равноускоренного движения
y = y 0 + v 0 t + a t 2 2 .
Еще одна распространенная задача кинематики, которая возникает при анализе равноускоренного движения — нахождение координаты при заданных значениях начальной и конечной скоростей и ускорения.
Исключая из записанных выше уравнений t и решая их, получаем:
s = v 2 — v 0 2 2 a .
По известным начальной скорости, ускорению и перемещению можно найти конечную скорость тела:
v = v 0 2 + 2 a s .
При v 0 = 0 s = v 2 2 a и v = 2 a s
Величины v , v 0 , a , y 0 , s , входящие в выражения, являются алгебраическими величинами. В зависимости от характера движения и направления координатных осей в условиях конкретной задачи они могут принимать как положительные, так и отрицательные значения.
http://spravochnick.ru/fizika/kinematika_vraschatelnogo_dvizheniya/
http://zaochnik.com/spravochnik/fizika/kinematika/ravnouskorennoe-dvizhenie/