Уравнения Парка – Горева для синхронной машины.
Уравнения Парка — Горева связывают между собой мгновенные значения токов, магнитных потоков, напряжений в осях координат (d, q), связанных с ротором.
Мгновенные значения параметров режима определяют как проекции на оси времени фаз а, b, с вектора тока (напряжения, ЭДС, потокосцепления), вращающегося с угловой скоростью  . Этот вектор тока называют обобщенным.
. Этот вектор тока называют обобщенным.
Оси времени ta, tb, tc фаз a, b, с неподвижны и совпадают с осями обмоток статора (рис. 2.1). Мгновенные значения фазных токов равны:
где  — произвольный угол.
— произвольный угол.

Рис.2.1 Обобщенный вектор тока  и его проекции на временные оси.
и его проекции на временные оси.
Проекции обобщенного вектора тока на оси d, q, связанные с ротором, дают значения продольного и поперечного токов (рис. 2.2):




При наличии токов нулевой последовательности

Соотношения, аналогичные приведенным выше, справедливы для напряжений, ЭДС и потокосцеплений.
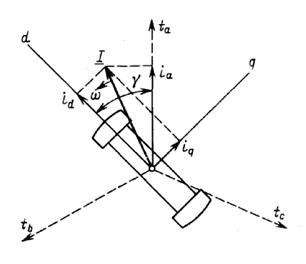
Рис. 2.2. Обобщенный вектор тока I и проекции его
на продольную и поперечную оси ротора
Связь между мгновенными значениями фазных величин и величин в продольной и поперечной осях устанавливается на основе уравнений:

Угол  меняется во времени:
меняется во времени:


где  — полное потокосцепление статора в продольной и поперечной осях.
— полное потокосцепление статора в продольной и поперечной осях.
В случаях симметричного режима энергосистемы токи нулевой последовательности отсутствуют (  = 0).
= 0).
Значения потокосцепления статора в поперечной и продольных осях определяются из выражений:
 = G (р) Uf + Xd (р) id
= G (р) Uf + Xd (р) id
 = Xq (p)
= Xq (p)  ,
,
где G(p)—операторная проводимость машины;
Xd(p), Xq(p) — операторные сопротивления машины в продольной и поперечной осях;
Uf — напряжение возбуждения машины.
Для машины без демпферных обмоток и эквивалентных им контуров:
 ;
;
 ;
;
 .
.
Если известна ЭДС  , то
, то
 ,
,
где  — постоянная времени обмотки возбуждения машины при разомкнутой обмотке статора;
— постоянная времени обмотки возбуждения машины при разомкнутой обмотке статора;
 — активное сопротивление обмотки статора по продольной оси;
— активное сопротивление обмотки статора по продольной оси;
 — реактивное сопротивление взаимной индукции обмотки возбуждения со статором в продольной оси;
— реактивное сопротивление взаимной индукции обмотки возбуждения со статором в продольной оси;
 — реактивное сопротивление индуктивности ротора в продольной оси.
— реактивное сопротивление индуктивности ротора в продольной оси.
Для машины с демпферными обмотками значения потокосцепления статора в поперечной и продольных осях и определяются теми же уравнениями.

Рис.2.3 Основные параметры синхронной машины для принятых направлений осей.
Уравнения Парка – Горева для принятых на рис.2.3. направлениях осей примут вид:
 ;
;
 ;
;
 ;
;
где  — активное сопротивление статора;
— активное сопротивление статора;
 — активное сопротивление статора нулевой последовательности;
— активное сопротивление статора нулевой последовательности;
 ;
;  ;
;
 .
.
В системе относительных единиц  , поэтому
, поэтому  .
.
Третье уравнение системы относится к случаю несимметричного режима или несимметричной схемы.
Уравнения, приведенные выше, полностью описывают переходный процесс машины, работающей на шины неизменного напряжения. Для анализа переходного процесса в сложной энергосистеме уравнения составляются для каждого элемента (генераторов, нагрузок, участков сети) и решаются совместно.
Решение системы уравнений Парка – Горева относительно токов или других величин, рассматриваемых как неизвестные, проводится в операторной форме (для изображений), например находятся значения токов
 ;
;  ;
;
где  , D2 (p) — миноры определителя системы; D (р) — главный определитель системы.
, D2 (p) — миноры определителя системы; D (р) — главный определитель системы.
Характер переходного процесса в системе определяется знаком действительной части корней определителя D(р). При Re(pt, . . рn)
 ,
,
где  — постоянная инерции машины.
— постоянная инерции машины.
Для определения параметров при переходных процессах можно использовать упрощенные уравнения Парка – Горева. Для получения этих уравнений отказываются от учета влияния:
1) апериодической составляющей тока статора (трансформаторной ЭДС);
2) периодических токов ротора, связанных с апериодическими составляющими тока статора;
3) активного сопротивления в цепи статора.
В системе относительных единиц при  уравнения Парка — Горева для синхронной машины будут иметь вид:
уравнения Парка — Горева для синхронной машины будут иметь вид:
 ;
;  .
.
Данные уравнения положены в основу расчетов периодической составляющей токов короткого замыкания при обычно принимаемых допущениях.
При принятых предпосылках отдаваемая мощность численно равна вращающемуся моменту; поэтому для симметричного режима или режима, условно приведённого к симметричному,
 .
.
Уравнение относительного движения ротора
 .
.
На основе этих расчетных уравнений (их иногда называют уравнениями Лонглея или уравнениями Лебедева — Жданова) обычно ведутся проектные и эксплуатационные расчеты устойчивости. Они позволяют для расчетов переходных процессов пользоваться соотношениями, вытекающими из векторной диаграммы установившегося режима [рис.2.1].
Система относительных единиц. Система уравнений явнополюсной синхронной машины в системе относительных единиц Горева
Система относительных единиц. Система уравнений явнополюсной синхронной машины в системе относительных единиц Горева
Система относительных единиц
Система уравнений синхронной машины обычно записывается в относительных единицах, вследствие чего упрощается запись данных уравнений и облегчается сравнение результатов исследования переходных процессов для машин различной мощности.
Система относительных единиц — способ расчета параметров в системах передачи электроэнергии, при котором значения системных величин (напряжений, токов, сопротивлений, мощностей и т.п.) выражаются как множители определенной базовой величины, принятой за единицу.
Существует несколько видов систем относительных единиц, основные из которых: система относительных единиц Горева и система относительных единиц « X ad ». В рамках данной публикации будем рассматривать систему относительных единиц Горева.
Базисные величины статорной цепи
В качестве независимых базисных величин для статорной цепи обычно принимается амплитуда номинальных тока и фазного напряжения, синхронная угловая частота  .
.
Базисные значения тока и напряжения статора (контуров якоря) машины равны амплитуде фазного тока и фазного напряжения:
 ,
, 
Базисное значение мощности статорной цепи будет определяться в следующем виде:

Базисное значение угловой скорости равно синхронной угловой скорости при номинальной частоте:
 эл. радиан/сек.
эл. радиан/сек.
Прочие базисные параметры определяются по следующим соотношениям:
 ;
;  ;
; 
Базисные величины роторной цепи
В качестве независимых базисных величин для роторной цепи принимается такие значения тока, напряжения и потокосцепления роторного контура, которые обусловливают на статоре идеализированной синхронной машины в режиме холостого хода номинальное напряжение.
При протекании базисного тока по роторному контуру (обмотка ротора или демпферные обмотки) в режиме холостого хода при синхронной угловой скорости напряжение статора равно номинальному. Данное утверждение записывается в следующем виде:
 ;
;  ;
;  .
.
Базисные напряжения роторных контуров определяются как произведение базисного тока на активное сопротивление контуров:
 ;
;  ;
;  .
.
Базисные значения сопротивлений роторных контуров принимаются равными активным сопротивлениям контуров:
 ;
;  ;
;  .
.
Представленный подход позволяет легко связать базисные величины статорной цепи базисными величинами роторной цепи.
Определение величины базисного тока ротора и демпферных обмоток.
Базисное значение тока обмотки возбуждения определяется по спрямленной в начале координат характеристике холостого хода машины (см. рис.1), построенной в относительных единицах.

Рис.1. Определение базисного значения тока роторных контуров.
Ток возбуждения отнесен к номинальному току возбуждения на холостом ходе:

где  — это такой ток возбуждения, при котором на холостом ходе генератора при номинальной угловой скорости вращения напряжение на выводах обмотки статора равно номинальному значению.
— это такой ток возбуждения, при котором на холостом ходе генератора при номинальной угловой скорости вращения напряжение на выводах обмотки статора равно номинальному значению.
Графическое определение базисного тока  , выраженного в долях
, выраженного в долях  , показано стрелками на рис., базисный ток в именованных единицах определяется по формуле
, показано стрелками на рис., базисный ток в именованных единицах определяется по формуле  . Если характеристика холостого хода задана в виде таблицы пар значений
. Если характеристика холостого хода задана в виде таблицы пар значений  ,
,  , можно найти тангенс угла наклона начального участка характеристики и вычислить:
, можно найти тангенс угла наклона начального участка характеристики и вычислить:

Базисные значения токов демпферных контуров в осях d и q равны:


Преобразим систему уравнений явнополюсной синхронной машины в систему относительных единиц Горева.
Система уравнений для напряжений статорной цепи
Рассмотрим систему уравнений, которая записана для статорной цепи.


Перепишем данную систему уравнений относительно базисных переменных, для этого разделим представленные уравнения на базисное значение напряжения:
 .
.
Первое уравнение рассматриваемой системы преобразуется к следующему виду:


Второе уравнение рассматриваемой системы преобразуется к следующему виду:


где s — скольжение ротора относительно синхронной оси.

Скольжение — Относительная разность скоростей поля статора и ротора называется скольжением
Скольжение не может быть равным нулю, так как при одинаковых скоростях поля и ротора прекратилось бы наведение токов в роторе и, следовательно, отсутствовал бы электромагнитный вращающий момент.
Скольжение асинхронного генератора  .
.
Система уравнений для потокосцеплений статорных контуров
Рассмотрим систему уравнений, которая записана для потокосцеплений статорных контуров.


Для выполнения дальнейших преобразований системы уравнений введем новые переменные:
› синхронная ЭДС статора  — ЭДС, индуктируемая в контуре статора током возбуждения при синхронной частоте вращения:
— ЭДС, индуктируемая в контуре статора током возбуждения при синхронной частоте вращения:

› синхронная ЭДС, связанные с токами демпферных контуров  по поперечной оси:
по поперечной оси:

› синхронная ЭДС, связанные с токами демпферных контуров  по продольной оси:
по продольной оси:

C учетом новых введенных переменных система уравнений перепишется в следующем виде:


Перепишем систему уравнений относительно базисных переменных, для этого разделим данные уравнения на базисный поток статорной цепи:

Первое уравнение рассматриваемой системы преобразуется к следующему виду:


Второе уравнение рассматриваемой системы преобразуется к следующему виду:


где синхронное индуктивное сопротивление машины по продольной оси  в относительных единицах определяется следующим образом:
в относительных единицах определяется следующим образом:

синхронное индуктивное сопротивление машины по поперечной оси  в относительных единицах определяется следующим образом:
в относительных единицах определяется следующим образом:

Система уравнений для потокосцеплений роторных контуров
Рассмотрим систему уравнений, которая записана для потокосцеплений роторных контуров.



Умножим данную систему уравнений на выражение  (или
(или  ; или
; или  ) и введем новые переменные в систему уравнений:
) и введем новые переменные в систему уравнений:
› переходная ЭДС статора  :
:

› переходная ЭДС, связанная с токами демпферных контуров  по поперечной оси:
по поперечной оси:

› переходная ЭДС, связанная с токами демпферных контуров  по продольной оси:
по продольной оси:

В результате преобразования получим следующую систему уравнений для потокосцеплений роторных контуров.



Перепишем данную систему уравнений через сопротивления  ,
,  ,
,  ,
,  и
и  . В результате данного преобразования получим следующую систему уравнений:
. В результате данного преобразования получим следующую систему уравнений:





Перепишем систему уравнений относительно базисных переменных, для этого разделим данные уравнения на базисное напряжение статорной цепи:

В результате данного преобразования получим следующую систему уравнений (в относительных единицах):



Система уравнений для напряжений роторной цепи
Рассмотрим систему уравнений, которая записана для роторных цепей.



Умножим данную систему уравнений на выражение (или  или ).
или ).
Первое уравнение рассматриваемой системы преобразуется к следующему виду:



Второе уравнение рассматриваемой системы преобразуется к следующему виду:



Третье уравнение рассматриваемой системы преобразуется к следующему виду:



Постоянные времени используемые в уравнениях определяются следующим образом:
› Постоянная времени контура возбуждения  :
:

› Постоянные времени демпферных контуров  :
:


Перепишем полученную систему уравнений относительно базисных переменных, для этого разделим данные уравнения на базисное напряжение:

Первое уравнение рассматриваемой системы преобразуется к следующему виду:


где  в относительных единицах.
в относительных единицах.
Второе уравнение рассматриваемой системы преобразуется к следующему виду:


Третье уравнение рассматриваемой системы преобразуется к следующему виду:


Система уравнений явнолюполюсной синхронной машины в относительных единицах Горева
В результате преобразования была получена система уравнений явнолюполюсной синхронной машины для вращающейся системы координат (odq) с учетом демпферных контуров, которая представлена в относительных единицах Горева.
1. Система уравнений для напряжений статорной цепи:


2. Система уравнений для потокосцеплений статорных контуров:


3. Система уравнений для потокосцеплений роторных контуров:


4. Система уравнений для напряжений роторной цепи и демпферных контуров (уравнения равновесия напряжений роторных контуров):



В систему уравнений, которая записана в относительных единицах Горева, входят переменные статорной цепи и переменные обмотки ротора:
› Переменные статорной цепи
Переменные  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  записаны относительно базисного напряжения статорной цепи;
записаны относительно базисного напряжения статорной цепи;
Переменные  ,
,  ,
,  ,
,  записаны относительно базисного тока и потокосцепления статорной цепи.
записаны относительно базисного тока и потокосцепления статорной цепи.
› Переменные обмотки ротора
Переменные  записаны относительно базисного напряжения ротора;
записаны относительно базисного напряжения ротора;
Переменные  ,
,  ,
,  записаны относительно базисного тока ротора.
записаны относительно базисного тока ротора.
Сопротивления, которые входят в систему уравнений синхронной машины
Ниже представлены сопротивления, которые входят в представленную систему уравнений синхронной машины (в именованных единицах).
 — синхронное индуктивное сопротивление машины по продольной оси;
— синхронное индуктивное сопротивление машины по продольной оси;
 — синхронное индуктивное сопротивление машины по поперечной оси;
— синхронное индуктивное сопротивление машины по поперечной оси;
 — индуктивное сопротивление реакции якоря по продольной оси (сопротивление взаимоиндукции роторных и статорных контуров в продольной оси)
— индуктивное сопротивление реакции якоря по продольной оси (сопротивление взаимоиндукции роторных и статорных контуров в продольной оси)
 — индуктивное сопротивление реакции якоря по поперечной оси (сопротивление взаимоиндукции роторных и статорных контуров в поперечной оси)
— индуктивное сопротивление реакции якоря по поперечной оси (сопротивление взаимоиндукции роторных и статорных контуров в поперечной оси)
 — индуктивное сопротивление обмотки возбуждения
— индуктивное сопротивление обмотки возбуждения
 — индуктивное сопротивление демпферной обмотки в продольной оси
— индуктивное сопротивление демпферной обмотки в продольной оси
 — индуктивное сопротивление демпферной обмотки в поперечной оси
— индуктивное сопротивление демпферной обмотки в поперечной оси
 — индуктивное сопротивление рассеяния
— индуктивное сопротивление рассеяния
Примечание:
Для перевода данных переменных сопротивления к базисным единицам достаточно разделить переменные на базисную величину  .
.
Соотношения между переменными  и ,
и ,  и
и  :
:


Вспомогательные ЭДС, которые входят в систему уравнений синхронной машины
Ниже представлены вспомогательные ЭДС, которые входят в представленную систему уравнений синхронной машины (в именованных единицах).
 — синхронная ЭДС статора, которая индуктируется током возбуждения в контуре статорной обмотке при синхронной частоте вращения.
— синхронная ЭДС статора, которая индуктируется током возбуждения в контуре статорной обмотке при синхронной частоте вращения.
 — синхронная ЭДС, связанные с токами демпферных контуров
— синхронная ЭДС, связанные с токами демпферных контуров
 — синхронная ЭДС, связанные с токами демпферных контуров
— синхронная ЭДС, связанные с токами демпферных контуров
 — переходная ЭДС статора синхронной машины
— переходная ЭДС статора синхронной машины
 — переходная ЭДС, связанная с токами демпферных контуров
— переходная ЭДС, связанная с токами демпферных контуров
 — переходная ЭДС, связанная с токами демпферных контуров
— переходная ЭДС, связанная с токами демпферных контуров
Примечание:
Для перевода переменных из именованных единиц к базисным единицам достаточно разделить переменные на базисную величину напряжения:
 .
.
Таким образом, вспомогательные ЭДС в относительных единицах Горева определяются следующим образом:


Для того, чтобы добавить Ваш комментарий к статье, пожалуйста, зарегистрируйтесь на сайте.
Уравнения электромагнитного переходного процесса синхронной машины
Общие сведения об электромагнитных переходных процессах
Основными причинами возникновения электромагнитных переходных процессов являются:
· Включение и отключение двигателей и других приемников электрической энергии;
· Короткое замыкание в электрической системе, автоматическое повторное включение линии на сохранившееся короткое замыкание;
· Возникновение местной несимметрии в системе;
· Действие форсировки возбуждения синхронных машин, их развозбуждение;
· Несинхронное включение синхронных машин.
Коротким замыканием называют всякое, не предусмотренное нормальными условиями работы, замыкание между фазами, а в системах с заземленными нейтралями – замыкание одной или нескольких фаз на землю.
В трехфазных системах с заземленной нейтралью различают следующие основные виды коротких замыканий в одной точке:
· Трехфазное короткое замыкание – К (3) ;
· Двухфазное короткое замыкание – К (2) ;
· Однофазное короткое замыкание – К (1) ;
· Двухфазное короткое замыкание на землю – К (1,1) .
Симметричным называют такое короткое замыкание, когда при нем все фазы остаются в одинаковых условиях, иначе короткое замыкание называют несимметричным.
Следствиями действия тока короткого замыкания являются:
· Дополнительный нагрев токоведущих элементов и проводников выше допустимого;
· Возникновение больших механических усилий между проводниками;
· Снижение напряжения, приводящее к ухудшению эффективности работы потребителей, авариям на электростанциях и подстанциях;
· Нарушение работы линий связи и сигнализации, за счет наведения дополнительных магнитных потоков;
· Нарушение устойчивости электрических систем.
Токи короткого замыкания с учетом действия устройств релейной защиты обычно существуют непродолжительное время, но их приходится учитывать и тщательно рассчитывать ввиду вышеуказанных последствий. По режиму короткого замыкания должны проверяться
1) В электроустановках выше 1 кВ:
а) электрические аппараты, токопроводы, кабели и другие проводники, а также опорные конструкции для них;
б) воздушные линии при ударном токе короткого замыкания 50 кА и более для предупреждения схлестывания проводов при динамическом действии токов короткого замыкания.
2) В электроустановках до 1 кВ – распределительные щиты, токопроводы и силовые шкафы.
Аппараты, которые предназначены для отключения токов короткого замыкания, должны обладать способностью производить эти операции при всех возможных токах короткого замыкания.
Уравнения электромагнитного переходного процесса синхронной машины
Переходный процесс в электрической машине любого типа может быть описан системой дифференциальных уравнений в той или иной системе координат. Выбор системы координат определяется конкретными условиями решаемой задачи. Дифференциальные уравнения равновесия ЭДС и падений напряжений в каждой из обмоток статора (А, В, С) и ротора (f):
где RА, RВ, RС, Rf – активные сопротивления контуров фаз А, В, С и обмотки возбуждения; ΨА, ΨВ, ΨС, Ψf — результирующие потокосцепления контуров фаз А, В, С и обмотки возбуждения.
Входящее в эту систему потокосцепление обмотки фазы А выражается уравнением:
где LА – коэффициент самоиндукции обмотки фазы А; MАВ — коэффициент взаимоиндукции обмоток фаз А и В; MАС — коэффициент взаимоиндукции обмоток фаз А и В; MАf — коэффициент взаимоиндукции обмотки фазы А и обмотки возбуждения.
Аналогичными уравнениями выражаются потокосцепления для обмоток других фаз. Закон изменения взаимных индуктивностей между обмоткой возбуждения и каждой фазной обмоткой статора выражается синусоидальной функцией. Систему дифференциальных уравнений с переменными коэффициентами решить очень сложно. Для её решения существуют несколько способов. Известно, что мгновенные значения фазных величин (U, Ψ, i) можно получить как проекции фазных векторов на неподвижную ось времени или как проекции обобщенного вектора на неподвижные магнитные оси фаз. Обобщенный вектор в общем случае может характеризовать фазные величины, изменяющиеся во времени по произвольному закону. Возможность представления трехфазной системы векторов обобщенным вектором существенно упрощает выражение связи между статором и ротором, что позволяет в дифференциальных уравнениях переходного процесса освободится от переменных коэффициентов. Представление фазных величин fА, fВ, fС через обобщенный вектор возможно при условии:
Если сумма фазных переменных не равна нулю, то её целесообразно выразить через новое переменное f0 : fА+fB+fC=3f0. Нулевая составляющая во всех фазах одинакова и тождественна составляющей нулевой последовательности метода симметричных составляющих. Фазные переменные, выраженные через обобщенный вектор:
где α — угол между векторами fА и f.
Обобщенный вектор можно выразить и в двухосной системе координат. В качестве последней удобно выбрать декартовые ортогональные координаты. Преобразование координат соответствует замене переменных. Проекции вектора f (рис.3.5.) на оси х и у:
где θ — угол между магнитной осью фазы А и осью Х.
Применение новой системы координат сокращает переменные коэффициенты. Значительные упрощения можно достичь, используя декартову систему координат, жестко связанную с ротором синхронной машины. Эту систему координат сокращенно обозначают и называют d, q и 0 (рис.3.6). Поскольку фазные обмотки синхронной машины, расположенные в осях d, q, неподвижны относительно ротора, все индуктивности такой машины постоянны. Фазные переменные в системе координат d, q и 0:
где γ=ωсt+γ0 – угол, характеризующий положение ротора в пространстве; ωс — синхронная угловая скорость, γ0— начальный уг
Фазные переменные напряжения, тока в системе координат d, q и 0:
Подставляя фазные переменные в дифференциальное уравнение равновесия обмотки фазы А получим уравнения Парка-Горева:
где ∂Ψd/∂, ∂Ψq/∂t, ∂Ψ0/∂ – ЭДС трансформации, которые вызываются изменением величин потокосцеплений; Ψq∙∂γ/∂ и Ψd∙∂γ/∂t – ЭДС вращения (скольжения).


71. Переходные э. д. с. и реактивности синхронной машины.
Обратимся к синхронной явнополюсной машине без демпферных (успокоительных) обмоток. При КЗ в статорной цепи возникает переходный процесс, приводящий к изменению токов и напряжений предшествующего режима. Выясним, какими ЭДС и реактивностями можно характеризовать синхронную машину в начальный момент переходного процесса с целью расчета периодической составляющей тока КЗ для  .
.
Постановка задачи обусловлена тем, что синхронная ЭДС (  ), характеризующая машину в установившемся режиме, в момент КЗ скачкообразно изменяется. В силу этого она неизвестна и неприемлема для расчета переходного режима, равным образом как и
), характеризующая машину в установившемся режиме, в момент КЗ скачкообразно изменяется. В силу этого она неизвестна и неприемлема для расчета переходного режима, равным образом как и  и
и  , связанные с .
, связанные с .
Для решения поставленной задачи обратимся к балансу магнитных потоков в продольной оси (  ) синхронной машины для нормального нагрузочного режима (рис. 4.4, а). В указанной оси взаимодействуют две магнитосвязанные обмотки: обмотка возбуждения и обмотка статора.
) синхронной машины для нормального нагрузочного режима (рис. 4.4, а). В указанной оси взаимодействуют две магнитосвязанные обмотки: обмотка возбуждения и обмотка статора.
В режиме холостого хода ток обмотки возбуждения  создает магнитный поток
создает магнитный поток  , состоящий из потока рассеяния ротора
, состоящий из потока рассеяния ротора  и полезного потока
и полезного потока  :
:
 | (4.5) |
где:  – реактивность рассеяния обмотки возбуждения;
– реактивность рассеяния обмотки возбуждения;
 – индуктивное сопротивление реакции статора по оси ;
– индуктивное сопротивление реакции статора по оси ;
 – полная индуктивность обмотки возбуждения.
– полная индуктивность обмотки возбуждения.
Полезный поток  при вращении ротора обуславливает в статоре синхронную ЭДС, которые в системе относительных единиц одинаковы:
при вращении ротора обуславливает в статоре синхронную ЭДС, которые в системе относительных единиц одинаковы:
 |
В ненасыщенной машине поток составляет некоторую постоянную долю потока , которая характеризуется коэффициентом рассеяния обмотки возбуждения
 | (4.6) |
В нагрузочном режиме продольная составляющая тока статора  создает поток реакции статора
создает поток реакции статора  , который пронизывает обмотку возбуждения. В соответствии с этим полное потокосцепление обмотки возбуждения в нагрузочном режиме определяется выражением:
, который пронизывает обмотку возбуждения. В соответствии с этим полное потокосцепление обмотки возбуждения в нагрузочном режиме определяется выражением:
 | (4.7) |
Согласно принципа Ленца при внезапном изменении режима магнитосвязанных контуров результирующее потокосцепление обмотки возбуждения  остается неизменным. Физически это означает, что в начальный момент КЗ потоки
остается неизменным. Физически это означает, что в начальный момент КЗ потоки  и
и  можно представить как их значения в нормальном режиме (
можно представить как их значения в нормальном режиме (  ) плюс соответствующие им приращения
) плюс соответствующие им приращения  и
и  . Однако приращения потоков компенсируют друг друга, т.е.
. Однако приращения потоков компенсируют друг друга, т.е.
 |
оставляя неизменным значение , согласно выражения (4.7).
Для решения ранее сформулированной задачи используем неизменность . Зная коэффициент рассеяния  , выделим ту часть , которая связана со статором
, выделим ту часть , которая связана со статором
 | (4.8) |
Именно это потокосцепление  и обусловленная им ЭДС в обмотке статора
и обусловленная им ЭДС в обмотке статора  сохраняют в начальный момент переходного процесса свое предшествующее значение.
сохраняют в начальный момент переходного процесса свое предшествующее значение.
Придадим выражению (4.8) более наглядный вид:

В окончательной форме поперечная переходная ЭДС запишется так:
 | (4.9) |
 | (4.10) |
– продольная переходная реактивность; приводиться в паспортных данных машины;
 – реактивность рассеяния статорной обмотки.
– реактивность рассеяния статорной обмотки.
Начальное значение  определяется выражением (4.9) по параметрам
определяется выражением (4.9) по параметрам  и
и  , с которыми работала машина до нарушения режима.
, с которыми работала машина до нарушения режима.
http://simenergy.ru/simulation/modeling-primary/69-unit-system-gorev
http://lektsii.org/14-26433.html