Уравнения переходного процесса синхронной машины в фазных координатах
Страницы работы




Фрагмент текста работы
4 УРОВНЕНИЯ ПЕРЕХОДНОГО ПРОЦЕССА СИНХРОННОЙ МАШИНЫ В ФАЗНЫХ КООРДИНАТАХ
4.1 Общие замечания и допущения
Аналитическое исследование переходных процессов машины с учетом всех влияющих на них факторов представляет сложную задачу. Чтобы несколько упростить ее, приходится вводить ряд допущений, придавая машине некоторые свойства и качества, которыми она в действительности не обладает, т.е. рассматривать в известной мере « идеализированную » машину.
Рассматриваемые в данном разделе математические модели синхронного генератора (СГ) составлены при следующих допущениях:
1. Магнитная система машины ненасыщенна, в силу чего индуктивности машины не зависят от намагничивающих сил (н.с).
2. Вместо действительных кривых распределения н. с. и индукции в воздушном зазоре по расточке статора принимают только их основные, первые гармонические, соответственно чему наведенные в статоре ЭДС выражаются синусоидами основной частоты.
3. В магнитной системе машины отсутствуют какие-либо потери.
4. Конструктивное выполнение машины обеспечивает полную симметрию фазных обмоток статора и ротора.
При этих допущениях наиболее точной будет модель СГ в фазных координатах А, В, С.
4.2 Исходные уравнения
Дифференциальные уравнения равновесия ЭДС и падений напряжений в каждой из обмоток будут:
 (4.1)
(4.1)
где  — активные сопротивления соответственно для контуров каждой фазы, цепи возбуждения и демпферных обмоток;
— активные сопротивления соответственно для контуров каждой фазы, цепи возбуждения и демпферных обмоток;
 — результирующие потокосцепления соответствующих обмоток (включая их потокосцепления рассеяния).
— результирующие потокосцепления соответствующих обмоток (включая их потокосцепления рассеяния).
Потокосцепления, при принятых допущениях представляют собой линейные зависимости от тока данного контура и токов магнитносвязанных с ним других контуров. Коэффициентами пропорциональности при этом будут индуктивность L рассматриваемого контура и его взаимоиндуктивности М с другими контурами.
 (4.2)
(4.2)
Во вращающейся машине только индуктивности  можно считать постоянными. Все же остальные Lи М зависят от положения ротора относительно обмоток статора и, следовательно, являются функциями времени.
можно считать постоянными. Все же остальные Lи М зависят от положения ротора относительно обмоток статора и, следовательно, являются функциями времени.
После подстановки потокосцеплений из (4.2) в систему уравнений (4.1) получим систему дифференциальных уравнений с переменными коэффициентами.
 (4.3)
(4.3)
Наличие переменных коэффициентов, резко усложняет решение этой системы. Поэтому до последнего времени эта математическая модель СГ практически не использовалась.
4.1 Индуктивности обмоток синхронной машины
Исходя из уравнений (4.1), (4.2), (4.3), в качестве примера, на рисунке 4.1 представлен верхний уровень структурной схема математической модели синхронного генератора в фазных координатах. С целью упрощения в этой модели не учитываются демпферные обмотки. Как видно из рисунка структурная схема состоит из 4 субсистем, каждая из которых реализует расчет определенных величин:
Субсистема 1 (рисунок 4.2) реализует расчет соответствующих индуктивностей и взаимоиндуктивностей. В свою очередь субсистема 1 состоит из четырех подсистем (1.1-1.4), приведенных на рисунках 4.3-4.6.
Виртуальная модель, приведенная на рисунке 4.5, реализует решение уравнений
 ,
,
 , (4.4)
, (4.4)
 .
.
и позволяет рассчитать постоянные составляющие соответствующих индуктивностей (l0и m0) и амплитуды вторых гармоник тех же индуктивностей (l2и m2).
Виртуальная модель, приведенная на рисунке 4.4, реализует решение системы уравнений 2.5:
 (4.5)
(4.5)
и позволяет рассчитать индуктивности La,Lb,Lc.
Виртуальная модель, приведенная на рисунке 4.5, реализует решение системы уравнений 4.6:
 (4.6)
(4.6)
и позволяет рассчитать взаимоиндуктивности между обмотками статора Mab, Mac, Mbc.
Виртуальная модель, приведенная на рисунке 4.6, реализует решение системы уравнений 4.7:
 (4.7)
(4.7)
и позволяет рассчитать взаимоиндуктивности между обмоткой возбуждения и обмотками статора Maf, Mbf, Mcf.
На рисунке 4.7 приведена субсистема 2 расчета потокосцеплений соответствующих обмоток генератора, реализующая решение системы уравнений 4.8:
 (4.8)
(4.8)
Эта субсистема состоит из четырех подсистем 2.1-2.4. В качестве примера на рисунке 4.8 приведена модель расчета потокосцепления фазы А в соответствии с уравнением 1 системы 4.8 (подсистема 2.1). Подсистемы 2.2-2.4 расчета потокосцепления фаз В. С и обмотки возбуждения по своей структуре аналогичны подсистеме 2.1.
4.4 Математическая модель СГ в фазных координатах реализованная в пакете Matlab
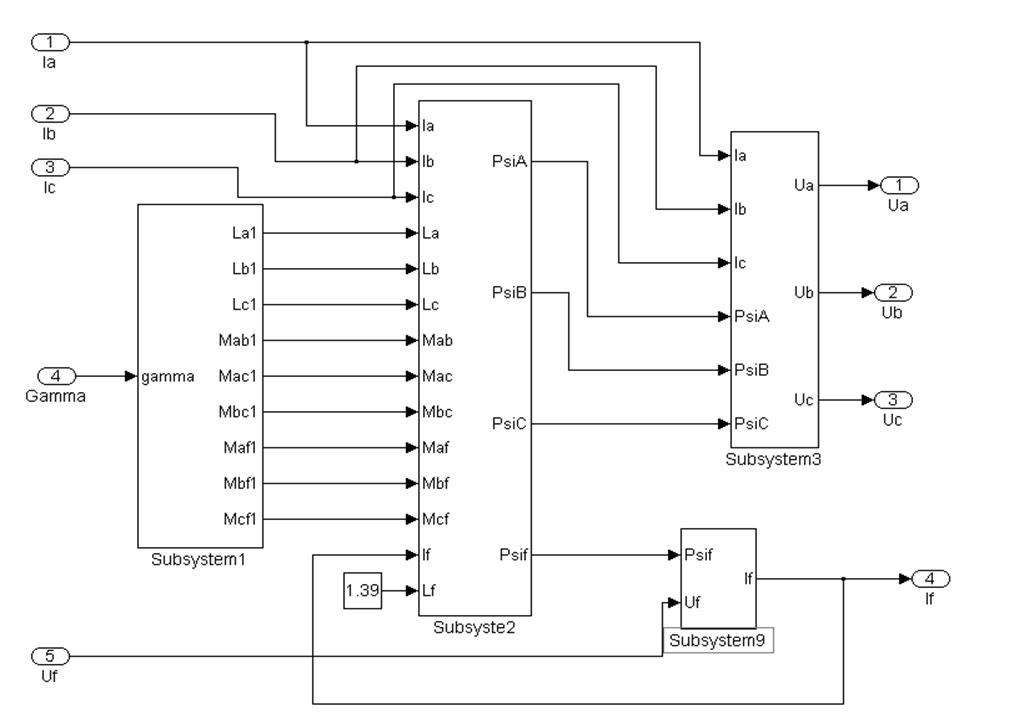
Рис 4.1 Структурная схема синхронного генератора в координатах  в режиме холостого хода
в режиме холостого хода
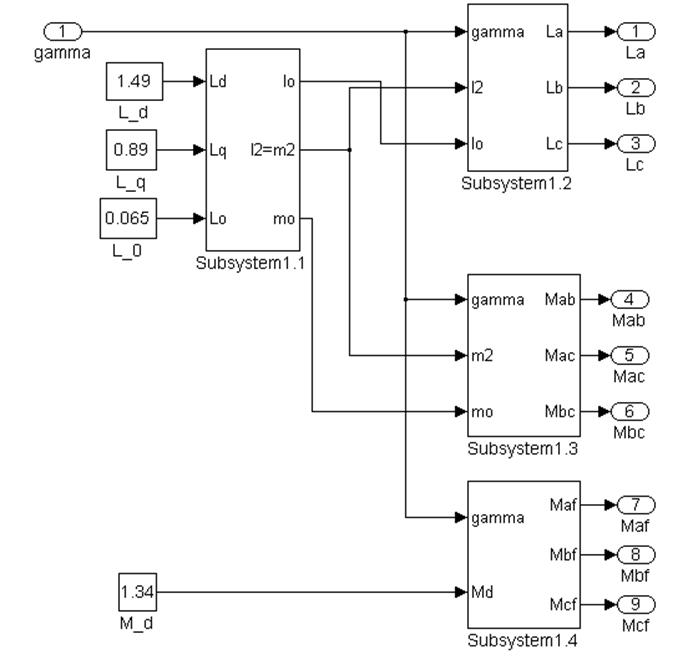
Рис 4.2 Субсистема 1.Структурная схема расчета индуктивностей и взаимоиндуктивностей.
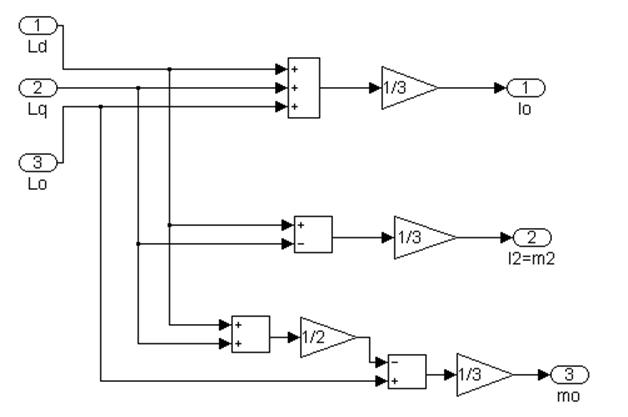
Рис 4.3 Подсистема 1.1. Расчет коэффициентов
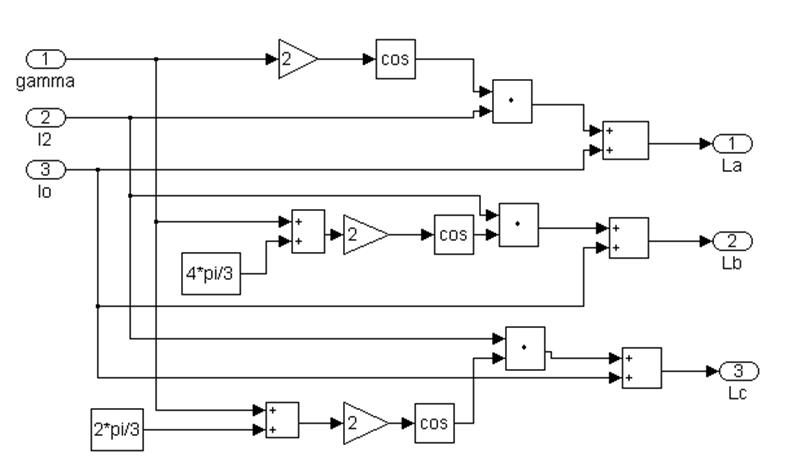
Рис 4.4 Подсистема 1.2. Расчет индуктивностей La,Lb,Lc
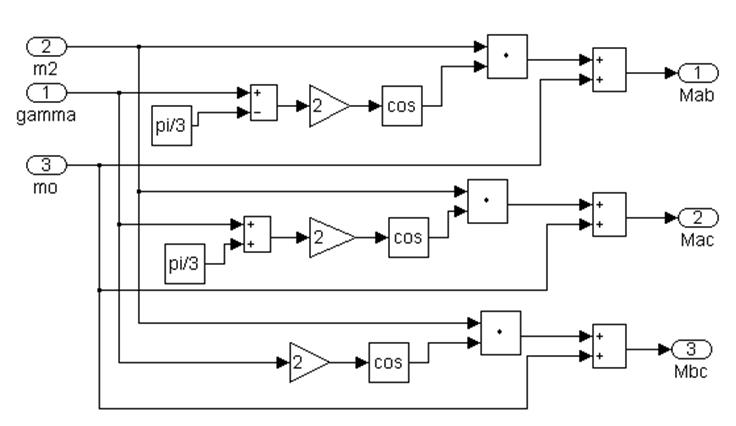
Рис 4.5 Подсистема 1.3. Расчет взаимоиндуктивностей между обмотками статора Mab, Mac, Mbc
Эта модель и многие последующие будет являться подсистемой другой модели, для внешней модели будут доступны только входы (In) и выходы (Out).
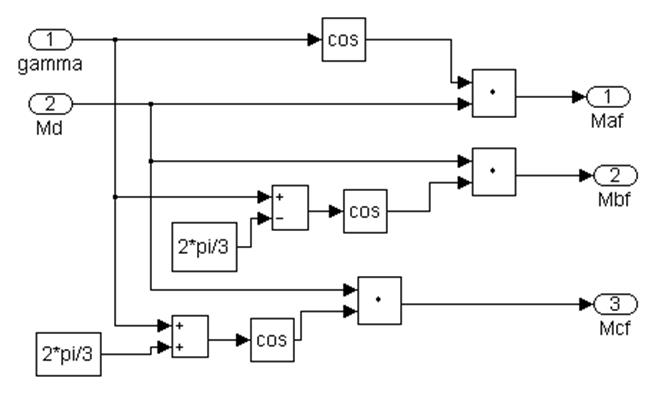
Рис 4.6 Подсистема 1.4. Расчет взаимоиндуктивностей между обмоткой возбуждения и обмотками статора Maf, Mbf, Mcf.
На рисунке 4.9,субсистема 3 реализует решение системы уравнений 4.9 и позволяет смоделировать фазные напряжения генератора.
 (4.9)
(4.9)
Субсистема 4, представленная на рисунке 4.10, моделирует ток в обмотке возбуждения в соответствии с уравнением:
 (4.10)
(4.10)
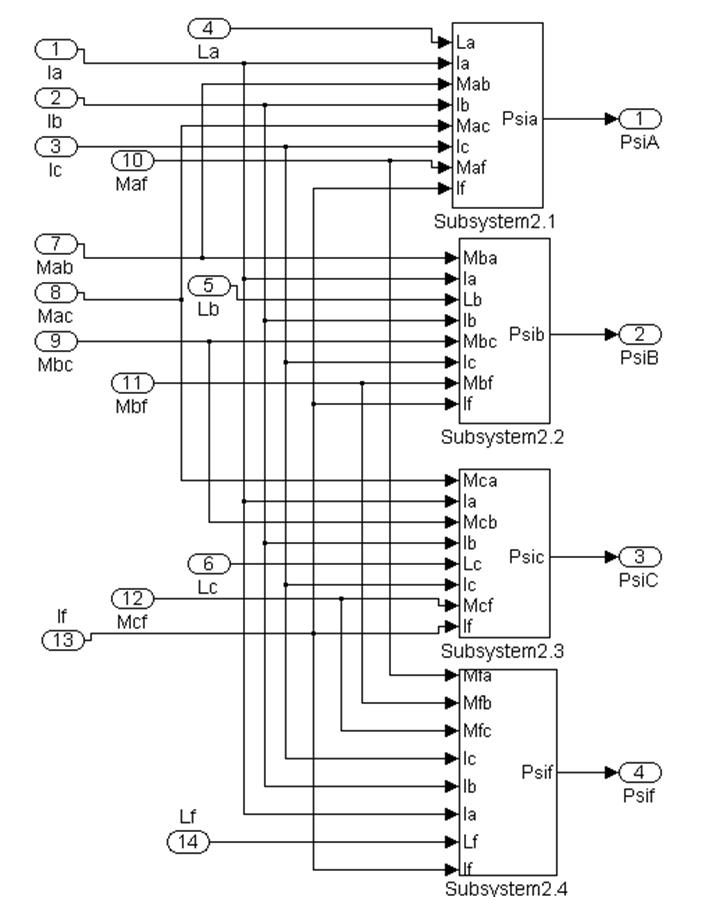
Рис 4.7 Субсистема 2 Структурная схема расчета потокосцеплений
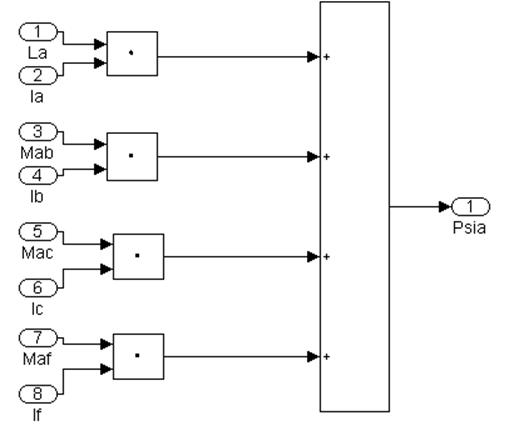
Рис 4.8. Подсистема 2.1. Расчет потокосцепления фазы А.
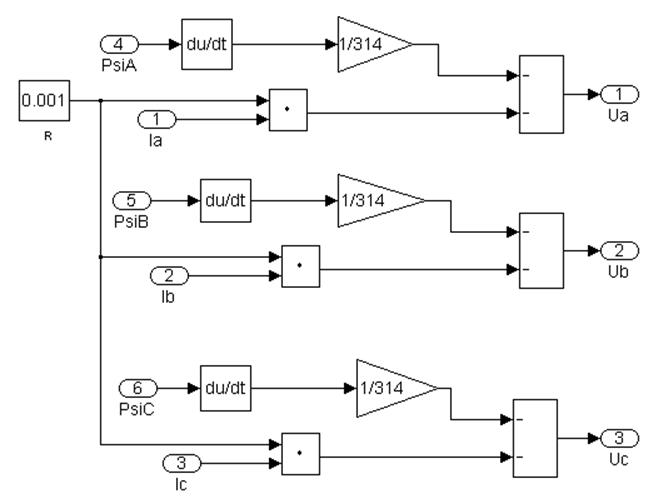
Рис 4.9 Субсистема 3. Расчет фазных напряжений генератора.
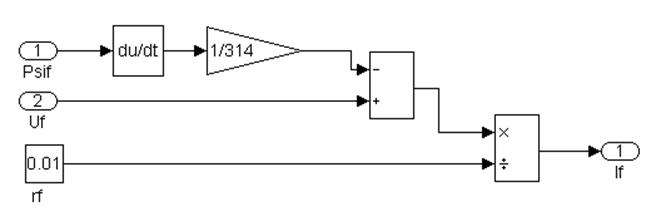
Рис 4.10. Субсистема 4. Расчет тока в обмотке возбуждения
Модель генератора можно составить как подсистему, состоящую из описанных выше подсистем.
При этом выходными параметрами модели будут напряжения в фазах
Уравнения электромагнитного переходного процесса синхронной машины
Общие сведения об электромагнитных переходных процессах
Основными причинами возникновения электромагнитных переходных процессов являются:
· Включение и отключение двигателей и других приемников электрической энергии;
· Короткое замыкание в электрической системе, автоматическое повторное включение линии на сохранившееся короткое замыкание;
· Возникновение местной несимметрии в системе;
· Действие форсировки возбуждения синхронных машин, их развозбуждение;
· Несинхронное включение синхронных машин.
Коротким замыканием называют всякое, не предусмотренное нормальными условиями работы, замыкание между фазами, а в системах с заземленными нейтралями – замыкание одной или нескольких фаз на землю.
В трехфазных системах с заземленной нейтралью различают следующие основные виды коротких замыканий в одной точке:
· Трехфазное короткое замыкание – К (3) ;
· Двухфазное короткое замыкание – К (2) ;
· Однофазное короткое замыкание – К (1) ;
· Двухфазное короткое замыкание на землю – К (1,1) .
Симметричным называют такое короткое замыкание, когда при нем все фазы остаются в одинаковых условиях, иначе короткое замыкание называют несимметричным.
Следствиями действия тока короткого замыкания являются:
· Дополнительный нагрев токоведущих элементов и проводников выше допустимого;
· Возникновение больших механических усилий между проводниками;
· Снижение напряжения, приводящее к ухудшению эффективности работы потребителей, авариям на электростанциях и подстанциях;
· Нарушение работы линий связи и сигнализации, за счет наведения дополнительных магнитных потоков;
· Нарушение устойчивости электрических систем.
Токи короткого замыкания с учетом действия устройств релейной защиты обычно существуют непродолжительное время, но их приходится учитывать и тщательно рассчитывать ввиду вышеуказанных последствий. По режиму короткого замыкания должны проверяться
1) В электроустановках выше 1 кВ:
а) электрические аппараты, токопроводы, кабели и другие проводники, а также опорные конструкции для них;
б) воздушные линии при ударном токе короткого замыкания 50 кА и более для предупреждения схлестывания проводов при динамическом действии токов короткого замыкания.
2) В электроустановках до 1 кВ – распределительные щиты, токопроводы и силовые шкафы.
Аппараты, которые предназначены для отключения токов короткого замыкания, должны обладать способностью производить эти операции при всех возможных токах короткого замыкания.
Уравнения электромагнитного переходного процесса синхронной машины
Переходный процесс в электрической машине любого типа может быть описан системой дифференциальных уравнений в той или иной системе координат. Выбор системы координат определяется конкретными условиями решаемой задачи. Дифференциальные уравнения равновесия ЭДС и падений напряжений в каждой из обмоток статора (А, В, С) и ротора (f):
где RА, RВ, RС, Rf – активные сопротивления контуров фаз А, В, С и обмотки возбуждения; ΨА, ΨВ, ΨС, Ψf — результирующие потокосцепления контуров фаз А, В, С и обмотки возбуждения.
Входящее в эту систему потокосцепление обмотки фазы А выражается уравнением:
где LА – коэффициент самоиндукции обмотки фазы А; MАВ — коэффициент взаимоиндукции обмоток фаз А и В; MАС — коэффициент взаимоиндукции обмоток фаз А и В; MАf — коэффициент взаимоиндукции обмотки фазы А и обмотки возбуждения.
Аналогичными уравнениями выражаются потокосцепления для обмоток других фаз. Закон изменения взаимных индуктивностей между обмоткой возбуждения и каждой фазной обмоткой статора выражается синусоидальной функцией. Систему дифференциальных уравнений с переменными коэффициентами решить очень сложно. Для её решения существуют несколько способов. Известно, что мгновенные значения фазных величин (U, Ψ, i) можно получить как проекции фазных векторов на неподвижную ось времени или как проекции обобщенного вектора на неподвижные магнитные оси фаз. Обобщенный вектор в общем случае может характеризовать фазные величины, изменяющиеся во времени по произвольному закону. Возможность представления трехфазной системы векторов обобщенным вектором существенно упрощает выражение связи между статором и ротором, что позволяет в дифференциальных уравнениях переходного процесса освободится от переменных коэффициентов. Представление фазных величин fА, fВ, fС через обобщенный вектор возможно при условии:
Если сумма фазных переменных не равна нулю, то её целесообразно выразить через новое переменное f0 : fА+fB+fC=3f0. Нулевая составляющая во всех фазах одинакова и тождественна составляющей нулевой последовательности метода симметричных составляющих. Фазные переменные, выраженные через обобщенный вектор:
где α — угол между векторами fА и f.
Обобщенный вектор можно выразить и в двухосной системе координат. В качестве последней удобно выбрать декартовые ортогональные координаты. Преобразование координат соответствует замене переменных. Проекции вектора f (рис.3.5.) на оси х и у:
где θ — угол между магнитной осью фазы А и осью Х.
Применение новой системы координат сокращает переменные коэффициенты. Значительные упрощения можно достичь, используя декартову систему координат, жестко связанную с ротором синхронной машины. Эту систему координат сокращенно обозначают и называют d, q и 0 (рис.3.6). Поскольку фазные обмотки синхронной машины, расположенные в осях d, q, неподвижны относительно ротора, все индуктивности такой машины постоянны. Фазные переменные в системе координат d, q и 0:
где γ=ωсt+γ0 – угол, характеризующий положение ротора в пространстве; ωс — синхронная угловая скорость, γ0— начальный уг
Фазные переменные напряжения, тока в системе координат d, q и 0:
Подставляя фазные переменные в дифференциальное уравнение равновесия обмотки фазы А получим уравнения Парка-Горева:
где ∂Ψd/∂, ∂Ψq/∂t, ∂Ψ0/∂ – ЭДС трансформации, которые вызываются изменением величин потокосцеплений; Ψq∙∂γ/∂ и Ψd∙∂γ/∂t – ЭДС вращения (скольжения).


71. Переходные э. д. с. и реактивности синхронной машины.
Обратимся к синхронной явнополюсной машине без демпферных (успокоительных) обмоток. При КЗ в статорной цепи возникает переходный процесс, приводящий к изменению токов и напряжений предшествующего режима. Выясним, какими ЭДС и реактивностями можно характеризовать синхронную машину в начальный момент переходного процесса с целью расчета периодической составляющей тока КЗ для  .
.
Постановка задачи обусловлена тем, что синхронная ЭДС (  ), характеризующая машину в установившемся режиме, в момент КЗ скачкообразно изменяется. В силу этого она неизвестна и неприемлема для расчета переходного режима, равным образом как и
), характеризующая машину в установившемся режиме, в момент КЗ скачкообразно изменяется. В силу этого она неизвестна и неприемлема для расчета переходного режима, равным образом как и  и
и  , связанные с .
, связанные с .
Для решения поставленной задачи обратимся к балансу магнитных потоков в продольной оси (  ) синхронной машины для нормального нагрузочного режима (рис. 4.4, а). В указанной оси взаимодействуют две магнитосвязанные обмотки: обмотка возбуждения и обмотка статора.
) синхронной машины для нормального нагрузочного режима (рис. 4.4, а). В указанной оси взаимодействуют две магнитосвязанные обмотки: обмотка возбуждения и обмотка статора.
В режиме холостого хода ток обмотки возбуждения  создает магнитный поток
создает магнитный поток  , состоящий из потока рассеяния ротора
, состоящий из потока рассеяния ротора  и полезного потока
и полезного потока  :
:
 | (4.5) |
где:  – реактивность рассеяния обмотки возбуждения;
– реактивность рассеяния обмотки возбуждения;
 – индуктивное сопротивление реакции статора по оси ;
– индуктивное сопротивление реакции статора по оси ;
 – полная индуктивность обмотки возбуждения.
– полная индуктивность обмотки возбуждения.
Полезный поток  при вращении ротора обуславливает в статоре синхронную ЭДС, которые в системе относительных единиц одинаковы:
при вращении ротора обуславливает в статоре синхронную ЭДС, которые в системе относительных единиц одинаковы:
 |
В ненасыщенной машине поток составляет некоторую постоянную долю потока , которая характеризуется коэффициентом рассеяния обмотки возбуждения
 | (4.6) |
В нагрузочном режиме продольная составляющая тока статора  создает поток реакции статора
создает поток реакции статора  , который пронизывает обмотку возбуждения. В соответствии с этим полное потокосцепление обмотки возбуждения в нагрузочном режиме определяется выражением:
, который пронизывает обмотку возбуждения. В соответствии с этим полное потокосцепление обмотки возбуждения в нагрузочном режиме определяется выражением:
 | (4.7) |
Согласно принципа Ленца при внезапном изменении режима магнитосвязанных контуров результирующее потокосцепление обмотки возбуждения  остается неизменным. Физически это означает, что в начальный момент КЗ потоки
остается неизменным. Физически это означает, что в начальный момент КЗ потоки  и
и  можно представить как их значения в нормальном режиме (
можно представить как их значения в нормальном режиме (  ) плюс соответствующие им приращения
) плюс соответствующие им приращения  и
и  . Однако приращения потоков компенсируют друг друга, т.е.
. Однако приращения потоков компенсируют друг друга, т.е.
 |
оставляя неизменным значение , согласно выражения (4.7).
Для решения ранее сформулированной задачи используем неизменность . Зная коэффициент рассеяния  , выделим ту часть , которая связана со статором
, выделим ту часть , которая связана со статором
 | (4.8) |
Именно это потокосцепление  и обусловленная им ЭДС в обмотке статора
и обусловленная им ЭДС в обмотке статора  сохраняют в начальный момент переходного процесса свое предшествующее значение.
сохраняют в начальный момент переходного процесса свое предшествующее значение.
Придадим выражению (4.8) более наглядный вид:

В окончательной форме поперечная переходная ЭДС запишется так:
 | (4.9) |
 | (4.10) |
– продольная переходная реактивность; приводиться в паспортных данных машины;
 – реактивность рассеяния статорной обмотки.
– реактивность рассеяния статорной обмотки.
Начальное значение  определяется выражением (4.9) по параметрам
определяется выражением (4.9) по параметрам  и
и  , с которыми работала машина до нарушения режима.
, с которыми работала машина до нарушения режима.
Уравнения переходного процесса синхронной машины
Название работы: Уравнение электромагнитного переходного процесса в синхронной машине
Предметная область: Производство и промышленные технологии
Описание: Стрелками показаны принятые положительные направления токов и напряжений в обмотках статора и ротора. Когда ток в обмотках статора и ротора положителен то и создаваемый им магнитный поток также считается положительным. Положительное направление магнитных осей фазных обмоток статора.
Дата добавления: 2015-04-27
Размер файла: 751.5 KB
Работу скачали: 35 чел.
Тема 2.3. Уравнение электромагнитного переходного процесса в синхронной машине.
2.3.1. Дифференциальные уравнения переходного процесса синхронной машины в фазных координатах. Потокосцепление обмоток.
Рассматривается машина без демпферных обмоток.
Принципиальная схема синхронной машины, ротор которой имеет явно выраженные полюса.

Рис. Принципиальная схема явнополюсной синхронной машины.
Стрелками показаны принятые положительные направления токов и напряжений в обмотках статора и ротора. Когда ток в обмотках статора и ротора положителен, то и создаваемый им магнитный поток также считается положительным.
Положительное направление магнитных осей фазных обмоток статора (А, В, С) и магнитных осей ротора ( d , q ).
Машина рассматривается в качестве генератора. Дифференциальные уравнения равновесия ЭДС и падений напряжения в каждой из обмоток будут:
где и — активные сопротивления контуров каждой фазы и цепи возбуждения;
и — результирующее потокосцепление соответствующих обмоток (включая их потокосцепления рассеяния).
Раскроем выражения для потокосцепления, которые при принятых допущениях представляют собой линейные зависимости от токов данного контура и магнитосвязанных с ним других контуров. Коэффициентами пропорциональности будут: индуктивность контура и взаимоиндуктивность с другими контурами.
Число различных значений в действительности в 2 раза меньше, так как по принципу взаимности , и т.д. Если бы и оставались неизменными, то система (1) состояла бы из линейных дифференциальных уравнений с постоянными коэффициентами, и решение не представляло бы трудностей.
Однако, при вращении ротора только можно считать неизменной, а остальные и зависят от положения ротора относительно обмоток статора и следовательно являются функциями времени.
Индуктивность обмоток синхронной машины.
Условимся определять положение ротора углом между магнитной осью фазы А и продольной осью ротора .

Рис. К определению пространственного положения ротора.
Синусоидальность наводимых в статоре на выходе генератора ЭДС холостого хода указывает на синусоидальность изменения взаимных индуктивностей между обмоткой возбуждения и каждой фазной обмоткой статора. Период этой функции (один оборот ротора), а максимум, например, для фазы А имеет вид:
и наступает при совпадении магнитных осей этих обмоток.
Изменение индуктивностей фазных обмоток и взаимоиндуктивностей обусловлено вращением явнополюсного ротора, поскольку при этом непрерывно меняется сопротивление магнитных потоков.
В большинстве практических расчетов ограничиваются приближенными выражениями для индуктивностей. Например, для фазы А:
и взаимоиндуктивность между обмотками, например, А и В:
где и — постоянные составляющие соответствующих индуктивностей.
и — амплитуда вторых гармоник тех же индуктивностей.
Рис. Кривые изменения индуктивностей машины в зависимости от положения ротора.
Для фаз В и С выражения индуктивностей будут отличаться соответствующими расположениями обмоток постоянными угловыми сдвигами.
Систему дифференциальных уравнений (1) с периодически изменяющимися коэффициентами решить невозможно. Избавиться от периодичности коэффициентов позволяет переход к вращающейся системе координат.
2.3.2. Обобщенный вектор трехфазной системы. Переход к прямоугольной системе координат, вращающейся с синхронной скоростью.
При обычном представлении каких-либо величин трехфазной системы симметричной звездой векторов, проекции их на ось времени дают мгновенные значения этих величин в фазах.

Рис. Определение мгновенных значений ЭДС в трехфазной системе через векторы ЭДС для каждой фазы.
Те же мгновенные значения можно получить, проектируя единый вектор на три оси времени, каждая из которых совпадает с магнитной осью соответствующей фазы. Такой вектор называется обобщенным (или изображением) вектором трехфазной системы.

Рис. Определение мгновенных значений ЭДС в трехфазной системе через обобщенный вектор ЭДС.
При его вращении в ту же сторону, что и система трех векторов чередование осей времени фаз нужно изменить на противоположное. Таким вектором можно характеризовать любые фазные переменные величины, изменяющееся в общем случае по произвольному закону, лишь бы соблюдалось единственное условие:
Величина искомого обобщенного вектора может быть определена:
Для чего достаточно возвести их в квадрат и просуммировать.
Угол сдвига относительно фазы А:

Рис. Обобщенный вектор трехфазной системы.
Далее от фазных осей времени перейдем к декартовым ортогональным координатам x , y , ориентация которых относительно фазы А задается углом . При этом проекция вектора f на оси x , y образуют новые переменные.

Рис. Преобразование координат. Неподвижные в пространстве координаты x , y .
Новые переменные, т.е. проекция f на оси x , y будут:
а их связь с фазными переменными определяется равенствами:
До сих пор предполагалось, что трехфазная система удовлетворяет условию:
Если сумма фазных переменных не равна нулю, то ее выражают через новую переменную :
— в известной мере тождественна составляющей нулевой последовательности метода симметричных составляющих.
Нулевая составляющая во всех фазах одинакова. Поэтому фазные величины могут выражены через , , и наоборот.
Если ось x совместить с осью фазы А, т.е. принять , то образуется так называемая система координат , . Эта двухфазная неподвижная относительно статора система координат упрощает систему уравнений синхронной машины, но не избавляет от периодических коэффициентов. Кроме перехода к декартовой системе координат используют еще преобразование А. Блонделя (теория двух реакций 1895), развитое для переходных процессов Парком (1928) и Горевым (1930). Двухостную систему координат предполагают жестко связанной с ротором, с осями и , т.е. принимают . Образуется система координат , , . Для тока, напряжения и потокосцепления фазы А можно записать:
В этой системе уравнений величина с индексом обозначают проекцию соответствующего обобщенного вектора (тока, напряжения, потокосцепления) на продольную ось, с индексом проекцию на поперечную ось ротора, с индексом — нулевую составляющую: , и как и все остальные величины рассматриваемой системы уравнений, представляют собой функции времени.
Совместное решение приведенной системы уравнений (13) и уравнения баланса напряжения для фазы А позволяет получить систему уравнений Парка-Горева:
Где и — индуктивность и индуктивное сопротивление нулевой последовательности машины;
— продольная реакция статора.
Все коэффициенты продольной системы уравнений не зависят от положения ротора, т.е. является постоянными величинами.
Физический смысл слагаемых уравнений:
— первые слагаемые представляют собой ЭДС трансформатора;
— вторые ЭДС вращения;
— третьи падение напряжения а активном сопротивлении.
В установившихся режимах ЭДС трансформации отсутствуют.
Уравнения выражают основу теории двух реакций синхронной машины при электромагнитном переходном процессе. Их называют уравнениями Парка Горева.
2.3.3. Уравнение Парка Горева. Запись в относительных единицах и в операторной форме.
Уравнение Парка Горева. Запись в относительных единицах.
Поскольку принимается допущение, что скорость вращения ротора машины в течение электромагнитного переходного процесса постоянна и равна синхронной, в дальнейшем будем считать:
где — синхронная угловая скорость;
и в относительных единицах при :
→ → , следовательно в относительных единицах: и .
Уравнение Парка Горева. Запись в операторной форме.
При переходе к операторной форме записи уравнений примем нулевые начальные условия. Будем рассматривать не сами переменные, а их приращения.
приращение потокосцепления (16)
Уравнения для машины без демпферных обмоток. Реактивности синхронной машины как передаточные функции можно записать:
как видно, при нулевых начальных условиях операторные уравнения сохраняют тот же вид, что и соответствующие им дифференциальные, лишь знак производной заменен .
http://lektsii.org/14-26433.html
http://5fan.ru/wievjob.php?id=88266