Введение. Определения (кинематика, динамика, статика, траектория, системы отсчета, уравнение движения).
Вопросы к зачету.
Кинематика.
Обработка и представление результатов измерений (виды погрешностей, оценка случайных величин).
Разница между результатом измерения и истинным значением измеряемой величины называется погрешностью измерения. Выделяют следующие виды погрешностей:1) абсолютная погрешность;2) относительна погрешность;3) приведенная погрешность;4) основная погрешность;5) дополнительная погрешность;6) систематическая погрешность;7) случайная погрешность;8) инструментальная погрешность;9) методическая погрешность;10) личная погрешность;11) статическая погрешность;12) динамическая погрешность. Оценка случайных погрешностей. Случайные погрешности трудно устранить. Они проявляются в рассеивании результатов многократных измерений одной и той же величины. Оценку случайных погрешностей производят с помощью теории вероятности и математической статистики.
Введение. Определения (кинематика, динамика, статика, траектория, системы отсчета, уравнение движения).
Механика— учение о простейшей форме движения материи, которое состоит в перемещении тел или их частей друг относительно друга.
Биомеханика — раздел естественных наук, изучающий на основе моделей и методов механики механические свойства живых тканей, отдельных органов и систем, или организма в целом, а также происходящие в них механические явления.
Кинематика— раздел механики, в котором изучается движение тел без рассмотрения причин, вызывающих движение.
Динамика— раздел механики, посвященный изучению движения материальных тел под действием приложенных к ним сил.
Статика— раздел механики, в котором изучаются условия равновесия механических систем под действием приложенных к ним сил и моментов.
Непрерывная линия, которую описывает точка при своем движении, называется траекторией.
Система отсчёта – это система координат, тело отсчета, с которым связана система координат, и прибор для измерения времени.
Уравнение движения — уравнение или система уравнений, задающие закон эволюции механической или динамической системы (например, поля) во времени и пространстве.
3. Кинематические характеристики движения. Перемещение, скорость (мгновенная, средняя), пройденный путь.
 Перемещение — это вектор, соединяющий начальное и последующее положения тела. Путь— это длина траектории. То есть длина той, возможно, кривой линии, по которой двигалось тело.
Перемещение — это вектор, соединяющий начальное и последующее положения тела. Путь— это длина траектории. То есть длина той, возможно, кривой линии, по которой двигалось тело.
Скорость – это количественная характеристика движения тела. Средняя скорость – это физическая величина, равная отношению вектора перемещения точки к промежутку времени Δt, за который произошло это перемещение. 
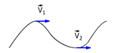 Мгновенная скорость физическая величина, равная пределу, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt: V=lim▲r/▲t=dr/dt. Вектор мгновенной скорости направлен по касательной к траектории движения тела.
Мгновенная скорость физическая величина, равная пределу, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt: V=lim▲r/▲t=dr/dt. Вектор мгновенной скорости направлен по касательной к траектории движения тела.
4. Ускорение, ускорение при криволинейном движении, тангенциальное и нормальное ускорения.
Ускорение— физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. Ускорение является векторной величиной, показывающей, на сколько изменяется вектор скорости тела при его движении за единицу времени.
Ускорение при криволинейном движении:ускорение равно производной скорости точки по времени. Формула ускорения при криволинейном движении:
a = dv / dt
Ускорение является вектором. Вектор ускорения можно представить в виде суммы векторов:
 a = aτ + an
a = aτ + an
Тангенциальное ускорение характеризует быстроту изменения скорости движения по численному значению и направлена по касательной к траектории.
 Нормальное ускорение характеризует быстроту изменения скорости по направлению.
Нормальное ускорение характеризует быстроту изменения скорости по направлению.
5.  Кинематика вращательного движения. Вращение по окружности с постоянной скоростью.
Кинематика вращательного движения. Вращение по окружности с постоянной скоростью.
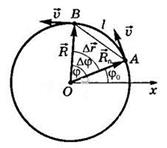
Движение твердого тела, при котором две его точки Аи В остаются неподвижными, называют вращениемтела вокруг неподвижной оси, а неподвижную прямую АВ называют осью вращения. Движение тела по окружности с постоянной по модулю скоростью — это движение, при котором тело за любые равные промежутки времени описывает одинаковые дуги.
Положение тела на окружности определяется радиусом-вектором, проведенным из центра окружности. Модуль радиуса-вектора равен радиусу окружности R.
6. Поступательное и вращательное движение твердого тела. Угловая скорость, угловое ускорение.
 Движение тела может быть, как поступательным так и вращательным. При поступательном движение любая прямая, проведенная в теле, перемещается параллельно самой себе.
Движение тела может быть, как поступательным так и вращательным. При поступательном движение любая прямая, проведенная в теле, перемещается параллельно самой себе.
 Вращательным движением твёрдого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся _по окружностям, центры которых лежат на одной прямой (ось вращения).
Вращательным движением твёрдого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся _по окружностям, центры которых лежат на одной прямой (ось вращения).
При вращении тела вокруг неподвижной оси точки тела за один и тот же промежуток времени совершают одно и тоже угловое перемещение. Быстроту изменения углового перемещения определяет угловая скорость — ω. Угловая скорость: w=lim(▲ф/▲t)=dф/dt . Угловое ускорение: B=lim▲w/▲t. Ось вращения B↑ — W↑; B↓ — W↓.
Динамика.
7. Динамика материальной точки. Первый закон Ньютона.
Динамика изучает движение тел с учетом причин, вызывающих это движение. Основу динамики составляют законы Ньютона.
Первый закон Ньютона (закон инерции). Тело (материальная точка), не подверженное внешним воздействиям, либо находится в покое, либо движется прямолинейно и равномерно. Свойств тел сохранять состояние покоя или равномерного прямолинейного движения 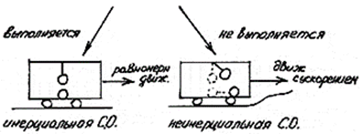 называют инерцией тела. Система отсчета, по отношению к которой выполняется закон инерции, называется инерциальной системой отсчета. Системы отсчета, движущиеся относительно любой инерциальной системы отсчета с ускорением, являются неинерциальными.
называют инерцией тела. Система отсчета, по отношению к которой выполняется закон инерции, называется инерциальной системой отсчета. Системы отсчета, движущиеся относительно любой инерциальной системы отсчета с ускорением, являются неинерциальными.
8. Второй закон Ньютона. Закон сохранения импульса.
 Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и её ускорением. Причиной возникновения ускорения является сила, действующая на тело. Силой называется векторная величина, характеризующая воздействие на данное тело со стороны других тел. F=mw. Единица измерения силы: 1Н=1 кг*м\с2..
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и её ускорением. Причиной возникновения ускорения является сила, действующая на тело. Силой называется векторная величина, характеризующая воздействие на данное тело со стороны других тел. F=mw. Единица измерения силы: 1Н=1 кг*м\с2..

Закон сохранения импульса: векторная сумма импульсов тел, составляющих замкнутую систему, не меняется с течением времени при любых движениях и взаимодействиях этих тел.
9. Третий закон Ньютона.
 Третий закон Ньютонаутверждает, что силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти материальные точки: F1=-F2.
Третий закон Ньютонаутверждает, что силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти материальные точки: F1=-F2.
10. Система единиц измерений физических величин в механике.
Среди многочисленных физических величин существуют основные базовые, через которые выражаются все остальные с помощью определенных количественных соотношений. Это – длина, время и масса. Рассмотрим подробнее эти величины и их единицы измерения. Длина– мера для измерения расстояния. Метр – единицадлины. Время – мера измерение разных промежутков времени. Секунда – эта единица времени. Если длина и время – фундаментальные характеристики времени и пространства, то масса является фундаментальной характеристикой вещества. Массой обладают все тела: твердые, жидкие, газообразные. Масса характеризует равные свойства материи. Килограмм – единица массы.
11. Динамика системы материальных точек.
Динамика систем материальных точек – основа динамики твердых тел, поскольку последние можно представить в виде системы материальных точек, расстояния между которыми остаются неизменными из-за сил взаимодействия, чрезвычайно быстро возрастающих при отклонении этих точек от своего положения равновесия. Тот факт, что взаимное расположение материальных точек в таких твердых телах остается неизменным, позволяет определить его положение в каждый момент времени заданием всего лишь шести параметров. Такими параметрами могут служить, например, три координаты какой-либо произвольной точки тела и три угла, определяющих его ориентацию относительно некоторой системы координат.
В динамике широко используется понятие центра масс системы материальных точек,который обычно обозначают буквой С. В однородном поле сил тяжести центр масс совпадает с центром тяжести системы. P(c)=V(c)*m- движение центра масс частиц.
12. Второй закон Ньютона для движения системы материальных точек.
 Второй закон Ньютона: скорость изменения импульса материальной точки во времени равна действующей на неё силе
Второй закон Ньютона: скорость изменения импульса материальной точки во времени равна действующей на неё силе
— уравнение движения материальной точки.
13. Виды взаимодействия (сил). Гравитационные силы. Масса инертная и гравитационная.
Физическими называются взаимодействия, приводящие к изменению скорости тел. Физические взаимодействия делятся на 2 типа: фундаментальные и производные. Фундаментальные взаимодействия:
 Сила гравитационного взаимодействия двух материальных точек: F=Gm1m2/r^2.
Сила гравитационного взаимодействия двух материальных точек: F=Gm1m2/r^2.
Пассивная гравитационная масса показывает, с какой силой тело взаимодействует с внешними гравитационными полями — фактически эта масса положена в основу измерения массы взвешиванием в современной метрологии. Активная гравитационная масса показывает, какое гравитационное поле создаёт само это тело — гравитационные массы фигурируют в законе всемирного тяготения. Инертная масса характеризует меру инертности тел и фигурирует в одной из формулировок второго закона Ньютона.
Теормех динамика ускорение статика кинематика
Содержание:
Кинематика точки
Скорость точки. Рассмотрим движение материальной точки  по отношению к системе ортогональных осей
по отношению к системе ортогональных осей  Геометрическое место последовательных положений точки в этой системе назовем траекторией точки. Положение точки в пространстве можно задать ее координатами
Геометрическое место последовательных положений точки в этой системе назовем траекторией точки. Положение точки в пространстве можно задать ее координатами  которые при движении материальной точки будут меняться в зависимости от времени, так что
которые при движении материальной точки будут меняться в зависимости от времени, так что

Выписанные уравнения определяют закон движения материальной точки и представляют собой параметрические уравнения траектории точки. В непрерывном движении материальной точки будем рассматривать функции  непрерывные вместе со своими производными первого и второго порядков. Рассматривая два близких положения материальной точки
непрерывные вместе со своими производными первого и второго порядков. Рассматривая два близких положения материальной точки  и
и  соответствующие моментам времени
соответствующие моментам времени  и
и  вектор
вектор  соединяющий эти точки, будем называть вектором перемещения точки за промежуток времени
соединяющий эти точки, будем называть вектором перемещения точки за промежуток времени  (рис. 26). Обозначая через
(рис. 26). Обозначая через  координаты точки
координаты точки  в момент
в момент  а через
а через  в момент
в момент  для координат вектора перемещения получим значения
для координат вектора перемещения получим значения 


Отношение вектора перемещения ко времени перемещения назовем средней скоростью точки за время 

Направление вектора средней скорости точки совпадает с направлением вектора перемещения точки. Предел этого отношения при  назовем истинной скоростью точки
назовем истинной скоростью точки

Секущая  при
при  займет предельное положение, совпадающее с положением касательной к кривой в точке
займет предельное положение, совпадающее с положением касательной к кривой в точке  Вектор средней скорости точки имеет проекции на оси координат
Вектор средней скорости точки имеет проекции на оси координат 
 Проекции истинной скорости определяются соотношениями
Проекции истинной скорости определяются соотношениями

Отсюда следует, что проекции вектора скорости являются первыми производными от координат точки по времени.
Производная от радиус-вектора точки. Положение движущейся материальной точки можно определить вектором  изменяющимся с течением времени по величине и по направлению относительно некоторой системы осей
изменяющимся с течением времени по величине и по направлению относительно некоторой системы осей  который будем называть радиус-вектором точки (рис. 26). Вектор перемещения точки можно представить через значение радиус-вектора точки в моменты
который будем называть радиус-вектором точки (рис. 26). Вектор перемещения точки можно представить через значение радиус-вектора точки в моменты  и
и 

Для средней скорости точки получим теперь выражение

Для истинной же скорости — предел этого отношения

таким образом, скорость точки может быть определена как производная от радиус-вектора точки по времени.
Возможно вам будут полезны данные страницы:
Величину скорости точки можно выразить через ее проекции на ортогональные оси координат.


где  — дифференциал дуги траектории точки. Выбрав определенным образом положительное направление отсчета дуги, можно определить, что при возрастании
— дифференциал дуги траектории точки. Выбрав определенным образом положительное направление отсчета дуги, можно определить, что при возрастании  производная
производная  будет положительной. Если условиться, что скорость
будет положительной. Если условиться, что скорость  положительна в направлении возрастания дуги , то
положительна в направлении возрастания дуги , то

Наиболее простым среди всех возможных движений точки является такое движение, при котором в любой момент времени выполняется условие

Такое движение будем называть равномерны м. Перепишем последнее уравнение в виде

после интегрирования отсюда получим

последнее равенство представляет собой закон изменения пути со временем.
Пример с решением задачи 6.
Точка  совершает движение в плоскости
совершает движение в плоскости  по закону
по закону

где  и
и  — постоянные величины. Определить траекторию и скорость точки.
— постоянные величины. Определить траекторию и скорость точки.
Уравнение траектории задаио в параметрическом виде. Исключив отсюда время  получим
получим

т. е. траекторией точки является окружность радиуса
. Проекции скорости получим, дифференцируя уравнения, определяющие координаты точки как функции времени

Отсюда величина скорости

Пример с решением задачи 7.
Ползун  приводится в движение нитью, наматывающейся на шкив радиуса
приводится в движение нитью, наматывающейся на шкив радиуса  вращающийся с угловой скоростью
вращающийся с угловой скоростью  Найти скорость ползуна как функцию расстояния
Найти скорость ползуна как функцию расстояния  (рис. 27).
(рис. 27).
Через неподвижную точку  нить проходит со скоростью
нить проходит со скоростью  С такой же скоростью изменяется длина отрезка нити
С такой же скоростью изменяется длина отрезка нити  Обозначив длину этого отрезка через
Обозначив длину этого отрезка через  получим
получим

С другой стороны,

где  определяется из соотношения
определяется из соотношения

Дифференцируя тождество (а), получим

где  определяется из условия
определяется из условия

Подставляя  и
и  будем иметь
будем иметь

откуда следует 

Статика
Статикой называется часть механики, изучающая условия, которым должны удовлетворять силы, действующие на систему материальных точек, при которых система находится в равновесии, а также условия эквивалентности системы сил.
Равновесие, как и движение, можно изучать только по отношению к некоторой определенной системе координат, принимаемой за неподвижную, или за абсолютную. В дальнейшем будем вводить некоторые идеальные модели материальных тел, упрощающие изучение последних.
В наиболее простых задачах будем рассматривать равновесия и движения таких материальных тел, положения которых с достаточной точностью могут быть определены как положения материальных точек, размерами которых можно пренебрегать при изучении движения или равновесия этих тел.
Такие материальные тела будем называть материальными точками. Материальные точки могут быть представлены как результат деления физического тела на бесконечно большое число частей. Но они могут представлять и конечные тела, обладающие определенным количеством вещества, когда размеры этих тел становятся несущественными. Второй из наиболее важных моделей является модель абсолютно твердоготела. Абсолютно твердым телом называют такую совокупность материальных точек, расстояния между которыми не могут быть изменены никакими действиями.
Реальные тела обычно могут изменять свою форму, при этом изменяются и расстояния между отдельными точками тел. Однако в ряде случаев эти изменения (деформации) настолько малы, что ими можно пренебрегать.
Одним из основных понятий механики является понятие силы. Силами в механике называют объективные причины, являющиеся результатом взаимодействия материальных объектов, способные вызвать движение материальных тел из состояния покоя или изменить существующее движение последних. Равными силами называются такие, которые вызывают одинаковые движения одного и того же объекта. Так как всякое движение материальных тел имеет относительный характер, а сила определяется вызываемым ею движением, то и понятие силы должно иметь относительный характер.
Одно и то же тело в различных системах отсчета в одно и то же время оказывается подверженным действию различных сил, зависящих от относительного движения систем отсчета. Мы не будем здесь заниматься вопросами происхождения сил, относя эти вопросы к курсам физики К
Мы будем говорить, что несколько сил, действующих на материальную точку, находятся в равновесии, если, будучи приложенными к этой точке, они не сообщают ей никакого движения относительно данной системы координат, и ускорение точки в этой системе остается равным нулю. Система материальных точек находится в равновесии, если она не получает никакого движения из состояния покоя от сил, действующих на эту систему.
Из повседневного опыта известно, что силы, действующие на твердое тело, имеют векторный характер. Они имеют определенную величину, направление и линию действия, а также точку приложения.
Если точка приложения силы совпадает с центром тяжести тела, то последнее под действием силы начинает двигаться из состояния покоя поступательно и при изучении такого движения тела можно отвлечься от его размеров, рассматривая движение лишь одной точки — центра тяжести. Понятие материальной точки в этом случае принимает вполне реальный смысл.
Современное понятие силы, действующей на материальную точку, было дано еще Галилеем, сформулировавшим свой знаменитый закон инерции, из которого следует, что действующая на материальную точку сила изменяет ее состояние покоя или равномерного прямолинейного движения, т. е. сообщает точке ускорение. Определенные так силы Ньютон назвал ускоряющими. Направление силы, действующей на точку, определяется направлением вектора ускорения точки, которое последняя приобретает под действием силы.
Ньютон предложил измерять силу, действующую на материальную точку, тем ускорением, которое она сообщает материальной точке, считая величину силы пропорциональной величине ускорения. Такую силу можно представить вектором  определяемым равенством
определяемым равенством

где  — ускорение точки;
— ускорение точки;  — коэффициент пропорциональности, называемый массой материальной точки.
— коэффициент пропорциональности, называемый массой материальной точки.
Первой системой мер, принятой для измерения силы, были меры веса. Это было вызвано тем, что первое представление о силе у человека возникло в связи с тем усилием, которое он должен был приложить, чтобы удержать груз рукой. Сравнение сил с весом может быть осуществлено при помощи динамометра, сравнивающего растяжение пружины силой с растяжением той же пружины подвешенным грузом. При таком измерении при помощи упругих деформаций две силы оказываются равными, если они производят одинаковые деформации или если их действия взаимно уничтожаются, когда эти силы заставляют действовать на одну и ту же точку по одной прямой, но в противоположные стороны.
Иногда в физике рассматривают силу как истинную реальность, существующую независимо от материальных объектов, которые являются ее источником или испытывают эффект ее действия, определяя силу независимо от движения, которое она способна произвести. Такая концепция противоречит определению силы, принятому в классической механике, и нами рассматриваться не будет.
- Мы будем каждый раз понимать силу как результат взаимодействия различных материальных объектов, не останавливаясь на выяснении физической природы взаимодействия, и будем измерять силу тем ускорением, которое она сообщает материальной точке.
Механика изучает физические законы природы. Законы эти устанавливаются в результате наблюдений, изучения природы. Обобщая многовековой опыт человечества, Галилей и Ньютон сформулировали основные законы механики, которые должны рассматриваться как аксиомы механики. Вся классическая механика строится на этих аксиомах, имеющих в основе экспериментальные факты. Для обоснования статики будем использовать следствия из основных законов Галилея—Ньютона, рассматривая эти следствия как самостоятельные аксиомы.
Аксиомы статики
Из повседневного опыта известно, что если на материальную точку действует несколько сил, то действие этой системы сил равносильно действию одной равнодействующей силы, строящейся по правилу многоугольника. Вектор, замыкающий силовой многоугольник, т. е. многоугольник, составленный из векторов сил, носит название равнодействующей силы. Этот опытный факт порождает первую аксиому статики.
- Аксиома I. Действие на точку твердого тела нескольких сил равносильно действию одной равнодействующей силы, строящейся по правилу сложения векторов.
Следствие. Силы, приложенные к точке твердого тела, складываются по правилу параллелограмма.
- Аксиома II. Две силы, приложенные к точке твердого тела, взаимно уравновешиваются тогда и только тогда, когда они равны по величине, направлены в противоположные стороны и лежат на одной прямой.
- Аксиома III. Действие на твердое тело системы сил не изменится, если добавить к этой системе или отбросить от нее две силы, равные по величине, направленные в противоположные стороны и лежащие на одной прямой.
Две последние аксиомы позволяют установить следующее следствие.
Следствие. Силу, действующую на твердое тело, можно переносить вдоль линии действия этой силы. При этом действие силы на твердое тело не изменяется.
Иначе говоря, действие силы на твердое тело не изменится, если последнюю приложить к твердому телу в любой точке се линии действия. В самом деле, пусть сила  действует на точку
действует на точку  твердого тела. На линии действия силы
твердого тела. На линии действия силы  добавим две направленные в противоположные стороны силы, равные по величине силе
добавим две направленные в противоположные стороны силы, равные по величине силе  и имеющие ту же линию действия, одна из которых, направленная в сторону, противоположную силе
и имеющие ту же линию действия, одна из которых, направленная в сторону, противоположную силе  , приложена к точке
, приложена к точке  , а другая— к точке
, а другая— к точке  . В соответствии с аксиомой III действие новой системы сил равносильно действию одной силы
. В соответствии с аксиомой III действие новой системы сил равносильно действию одной силы  . Отбрасывая теперь приложенные к точке
. Отбрасывая теперь приложенные к точке  силу
силу  и силу —
и силу — , в результате получим всего одну силу
, в результате получим всего одну силу  , приложенную к точке
, приложенную к точке  , действие которой на твердое тело равносильно действию одной силы
, действие которой на твердое тело равносильно действию одной силы  , приложенной в точке
, приложенной в точке  .
.
Две категории сил. Силы, действующие на твердое тело, можно разделить на две категории. К первой категории отнесем силы, которые создают или способны создать движение твердого тела.
- Силы этой категории называются активными силами. Активной силой является, например, сила веса, которая всегда создает движение твердого тела, если только этому движению не препятствуют другие причины. Силы, не создающие движения, но ограничивающие перемещения твердого тела, препятствующие его перемещениям, относятся ко второй категории сил и называются пассивными силами.
В качестве примера рассмотрим одну материальную точку  подвешенную на нерастяжимой нити к неподвижной точке
подвешенную на нерастяжимой нити к неподвижной точке  (рис. 83) и находящуюся под действием силы тяжести. Сила тяжести — активная сила, способная вызвать падение материальной точки вниз. Этому движению препятствует пассивная сила — сила натяжения нити. Последняя не в состоянии заставить точку двигаться вверх, но препятствует ее движению вниз. Если точку отклонить от вертикали, сохраняя нить в натянутом состоянии, то под действием силы тяжести точка будет стремиться двигаться по вертикали вниз. Этому движению будет препятствовать пассивная сила натяжения нити, заставляя точку двигаться по окружности.
(рис. 83) и находящуюся под действием силы тяжести. Сила тяжести — активная сила, способная вызвать падение материальной точки вниз. Этому движению препятствует пассивная сила — сила натяжения нити. Последняя не в состоянии заставить точку двигаться вверх, но препятствует ее движению вниз. Если точку отклонить от вертикали, сохраняя нить в натянутом состоянии, то под действием силы тяжести точка будет стремиться двигаться по вертикали вниз. Этому движению будет препятствовать пассивная сила натяжения нити, заставляя точку двигаться по окружности.
Рассматривая движение точки по гладкой горизонтальной плоскости, можно пренебречь действием силы тяжести, если только нас не интересует давление, оказываемое точкой на плоскость. Предположим, что на точку в горизонтальной плоскости действует нерастяжимая нить. Если точке сообщить скорость  ортогональную к нити, то она начнет двигаться по окружности. Изменение направления прямолинейного движения здесь происходит под действием пассивной силы натяжения нити, которая не создает, а только изменяет движение (препятствует движению). Как активные, так и пассивные силы удовлетворяют аксиоме Ньютона (третий закон Ныотона).
ортогональную к нити, то она начнет двигаться по окружности. Изменение направления прямолинейного движения здесь происходит под действием пассивной силы натяжения нити, которая не создает, а только изменяет движение (препятствует движению). Как активные, так и пассивные силы удовлетворяют аксиоме Ньютона (третий закон Ныотона).

- Аксиома IV. Действие одного тела на второе равно и противоположно действию этого второго тела на первое (действие равно противодействию).
Геометрические условия, ограничивающие перемещения точек, называют связями. Связи могут быть заданы аналитически в виде равенств или неравенств. Так, например, материальная точка  соединенная стержнем неизменной длины
соединенная стержнем неизменной длины  с неподвижным центром
с неподвижным центром  удовлетворяет условию связи
удовлетворяет условию связи

где  — координаты точки в системе отсчета с началом в центре
— координаты точки в системе отсчета с началом в центре  Материальная точка, соединенная с центром
Материальная точка, соединенная с центром  гибкой нерастяжимой нитью длины
гибкой нерастяжимой нитью длины  удовлетворяет следующему условию связи:
удовлетворяет следующему условию связи:

Рассмотренные связи препятствуют перемещениям материальных точек и обусловливают силы, препятствующие этим перемещениям. Последние будем называть силами реакции. Действие связей эквивалентно действию сил реакции, и можно ввести следующую аксиому связей.
- Аксиома V. Связи, наложенные на систему материальных точек, можно заменить силами реакций, действие которых эквивалентно действию связей.
Замечание. В статике будем рассматривать только неизменные во времени связи, которые не создают движения, а лишь препятствуют перемещениям в тех или иных направлениях (пассивные связи). Связи, меняющиеся со временем, будут рассматриваться в динамике.
Материальная точка, на которую действует активная сила  и наложены связи, испытывает со стороны связей действие силы реакции
и наложены связи, испытывает со стороны связей действие силы реакции  Находясь в состоянии покоя, точка может начать движение (получить ускорение) лишь в том случае, когда активная сила не уравновешивается силами реакции. Последние, не являясь силами, создающими движение, представляют собой силы, противодействующие активным или уравновешивающие их. В тех случаях, когда пассивные силы не в состоянии уравновесить действие активных сил, начинается движение.
Находясь в состоянии покоя, точка может начать движение (получить ускорение) лишь в том случае, когда активная сила не уравновешивается силами реакции. Последние, не являясь силами, создающими движение, представляют собой силы, противодействующие активным или уравновешивающие их. В тех случаях, когда пассивные силы не в состоянии уравновесить действие активных сил, начинается движение.
Пример с решением задачи 29.
Материальная точка, подвешенная при помощи нерастяжимой нити, находится под действием силы тяжести. Исследовать равновесие точки и найти натяжение нити.
Решение. Сила реакции будет уравновешивать действие силы тяжести в том случае, когда точка находится в наинизшем положении и нить направлена по вертикали, при этом величина силы реакции (натяжение нити) равна величине силы тяжести. Если же точка находится в состоянии покоя в отклоненном от вертикали положении, то сила реакции уже не сможет уравновесить силу тяжести, и точка под действием силы тяжести начнет движение по окружности (получит ускорение по касательной к окружности). Для равновесия этой точки необходимо приложить к ней силу  уравновешивающую действие составляющей
уравновешивающую действие составляющей  тогда составляющая силы тяжести, направленная вдоль нити, будет уравновешиваться действием силы реакции нити, т. е. будет равна по величине этой составляющей силы тяжести (рис. 84).
тогда составляющая силы тяжести, направленная вдоль нити, будет уравновешиваться действием силы реакции нити, т. е. будет равна по величине этой составляющей силы тяжести (рис. 84).
Пример с решением задачи 30.
Тяжелый цилиндр лежит на гладкой горизонтальной плоскости. Исследовать равновесие цилиндра.
Решение. На цилиндр действует активная сила — сила веса, способная вызвать движение цилиндра по вертикали вниз. Этому движению препятствует горизонтальная плоскость, создающая силу реакции, уравновешивающую действие силы веса (рис. 85).
К пассивным силам следует отнести и силу трения, о которой сделаем несколько дополнительных замечаний, поскольку она обладает некоторыми специфическими особенностями.

Динамика материальной точки
Динамика является главной частью механики. Она изучает движение различных механических систем в зависимости от причин, вызывающих это движение и влияющих на него. Причины эти в механике называются силами. Этим она и отличается от кинематики, которая при изучении движения материальных объектов не принимает во внимание причины, вызывающие это движение. В механике обычно не рассматривается происхождение сил, а изучается только их действие на движущиеся объекты. Изучение динамики начнем с задач о движении таких тел, размерами которых можно пренебрегать, а положение которых может быть определено как положение геометрической точки. Такие тела, или частицы материи, называют материальными точками. В теоретической механике все тела рассматриваются как совокупности взаимодействующих материальных точек. Одновременно с изменением положения каждое материальное тело, как бы мало оно ни было, может вращаться и деформироваться. Рассматривая движение материальной точки, будем изучать только изменение ее положения в пространстве, не интересуясь вращением и деформацией. Такое представление о материальной точке не лишено и реального смысла: подобной материальной точкой, с точки зрения механики, является центр тяжести твердого тела. В дальнейшем будет показано, что центр тяжести твердого тела движется как материальная точка, на которую действуют все силы, приложенные к этому телу.
Всякое движение материальной точки можно определить лишь по отношению к другим телам, а ее положение относительно других тел может быть задано тремя координатами, относящимися к определенному моменту времени.
Обычно выбирают прямоугольные декартовы координаты, так как они проще связаны с длинами и расстояниями.
Всякое движение происходит во времени. Моменты времени, к которым относятся координаты и расстояния, а также промежутки времени, становятся определенными, когда выбрана определенная система отсчета. Измерение времени может быть в принципе произведено при помощи любого периодического процесса. В практике же принято астрономическое измерение времени, основанное на изучении законов движения планет и вращения земного шара.
Фундаментальной единицей измерения времени являются звездные сутки — промежуток времени между двумя последовательными верхними кульминациями точки весеннего равноденствия. Время, протекшее от момента верхней кульминации точки весеннего равноденствия до любого другого момента, характеризуемого другим ее положением, выраженное в долях звездных суток (звездных часах, минутах и секундах), называется звездным временем. Звездные сутки в качестве основной единицы времени неудобны, потому что начало суток при этой единице может приходиться последовательно на любое время дня и ночи.
По этой причине основной единицей времени выбрано среднегодовое значение солнечных суток — промежутка времени между двумя последовательными прохождениями Солнца через меридиан данного места на земной поверхности. Продолжительность солнечных с\ток зависит от годового движения Земли относительно Солнца, поэтому приходится брать среднегодовое значение солнечных суток. Практической единицей времени считается секунда среднего солнечного времени, равная 1/86400 средних солнечных суток, что составляет около 1/86164,09 звездных суток.
С 1 января 1963 г. в Советском Союзе введена международная система единиц СИ, в которой за единицу времени принята 1 секунда, равная 1/31 556 925,9747 тропического года для 1900 г. января 0 в 12 часов эфемеридного времени, не зависящая от неравномерности вращения Земли.
Такой сопособ определения времени не является очень точным, поэтому в настоящее время для определения промежутков времени пользуются некоторыми естественными процессами, связанными с колебаниями атомов, период которых нечувствителен к внешним воздействиям. Но эти вопросы относятся уже к технике измерения времени и в курсе теоретической механики не изучаются.
Время, прошедшее между двумя событиями, называют промежутком времени, а границу между двумя промежутками называют моментом времени. В теоретической механике устанавливается независимо от событий или от системы, в которой наблюдаются события, соответствие между моментами времени и действительными числами. Определенное так время называют абсолютным идеальным временем.
Основные законы динамики
Свои основные положения динамика берет из опыта и наблюдений и с их помощью, а также с помощью кинематики и геометрии выводит законы движения.
Древние ученые имели смутное представление о законах движения. Аристотель (384—322 гг. до н. э.) не знал еще закона инерции, считая, что с прекращением действия силы тела прекращают двигаться. Только после долгих наблюдений над происходящими в природе движениями Галилеем был раскрыт один из основных законов движения, устанавливающий, что всякое тело пребывает в состоянии покоя или равномерного и прямолинейного движения до тех пор, пока внешние силы не выведут его из этого состояния. Этот закон не был сформулирован Галилеем в его универсальной форме, хотя Галилей и пользовался им в явном виде для объяснения различных явлений.
Закон инерции Галилея является обобщением опытных фактов, накопленных человечеством. Опираясь на него, Ньютон сформулировал свои основные законы движения.
Первый закон Ньютона. Всякое тело продолжает удерживаться в состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не принуждается приложенными силами изменить это состояние.
Под телом здесь подразумевается материальная точка, а сила определяется как причина, изменяющая равномерное и прямолинейное движение материальной точки. За меру силы Ньютон принял то ускорение, которое эта сила вызывает, в связи с чем сила в механике Ньютона называется ускоряющей.
Первый Закон Ньютона называют еще законом инерции. Под инерцией понимают способность тела сохранять свое движение или состояние покоя при отсутствии сил или изменять это состояние под действием сил.
Связь между силой и ускорением устанавливает второй закон Ныотона.
Второй закон Ныотона. Изменение количества движения пропорционально приложенной силе и происходит по направлению той прямой, по которой эта сила действует.
Математически этот закон можно представить в виде уравнения

где  — скорость движущейся точки;
— скорость движущейся точки;  — ее масса;
— ее масса;  — количество движения. Считая массу материальной точки величиной постоянной, второму закону Ньютона можно придать и другую математическую формулировку:
— количество движения. Считая массу материальной точки величиной постоянной, второму закону Ньютона можно придать и другую математическую формулировку:

т. е. ускорение, которое получает материальная точка, пропорционально действующей на точку силе. Это уравнение является основным законом движения материальной точки. Масса  входит в него как коэффициент пропорциональности между силой и ускорением. Из этого определения видно, что масса является характеристикой инертного свойства материальной точки, т. е. способности ее под действием заданной силы получать определенное ускорение. Так же, как и первый закон Ньютона, второй закон является результатом обобщения многовекового опыта всего человечества и принимается как одна из основных аксиом механики.
входит в него как коэффициент пропорциональности между силой и ускорением. Из этого определения видно, что масса является характеристикой инертного свойства материальной точки, т. е. способности ее под действием заданной силы получать определенное ускорение. Так же, как и первый закон Ньютона, второй закон является результатом обобщения многовекового опыта всего человечества и принимается как одна из основных аксиом механики.
Третий закон Ньютона. Действию всегда есть равное и противоположное противодействие, другими словами — действия двух тел друг на друга всегда равны и направлены в противоположные стороны.
Этот закон рассматривался нами при изучении аксиом статики.
Можно заметить, что второй закон Ньютона содержит в себе и закон инерции Галилея. В самом деле, если положить  то из второго закона следует
то из второго закона следует  или
или  т. е. если сила не действует на материальную точку, то последняя движется равномерно и прямолинейно. Тем не менее закон инерции Галилея устанавливает само понятие ускоряющих сил в механике.
т. е. если сила не действует на материальную точку, то последняя движется равномерно и прямолинейно. Тем не менее закон инерции Галилея устанавливает само понятие ускоряющих сил в механике.
Из второго закона Ньютона следует, что так же, как и ускорение, понятие силы в механике связано с определенной системой отсчета. Поскольку сила измеряется ускорением, которое она сообщает материальной точке, а ускорение имеет смысл только по отношению к той или иной системе отсчета, то и понятие силы должно быть относительным понятием и связано с выбором системы отсчета.
В различных системах отсчета математическая форма законов природы различна, однако существуют такие, так называемые инерциальные системы отсчета, в которых эти законы имеют наиболее простой вид. Такими инерциальными системами называются системы отсчета, в которых материальная точка при отсутствии действующих на нее сил взаимодействия (по третьему закону Ньютона) движется равномерно и прямолинейно, т. е. системы, для которых справедлив закон инерции Галилея (силы можно считать отсутствующими в том случае, когда все тела, от которых эти силы могут исходить, достаточно удалены, так что можно пренебрегать их влиянием).
С достаточной точностью такой инерциальной системой можно считать гелиоцентрическую систему координат. В первом приближении (для малых движений) система отсчета, связанная с Землей, так же может рассматриваться как инерциальная система координат.
Уравнение  справедливо только по отношению к инерциальной системе координат, в которой определена сила, действующая на материальную точку. Для всякой другой системы отсчета, движущейся относительно данной инерциальной системы поступательно и с постоянной скоростью, законы Ньютона остаются справедливыми, так как основной характеристикой в этих законах является ускорение, а не скорость.
справедливо только по отношению к инерциальной системе координат, в которой определена сила, действующая на материальную точку. Для всякой другой системы отсчета, движущейся относительно данной инерциальной системы поступательно и с постоянной скоростью, законы Ньютона остаются справедливыми, так как основной характеристикой в этих законах является ускорение, а не скорость.
В большинстве технических задач, в которых движения точек ограничены, основная система отсчета может быть связана с Землей. Для астрономических задач принятие такой системы невозможно, и приходится учитывать вращение Земли, а за основную систему отсчета выбирать систему, связанную со звездами. Подробнее эти вопросы будут рассмотрены в разделе, посвященном относительному движению материальной точки.
Две основные задачи динамики. Уравнения движения точки в декартовых осях
В динамике точки рассматриваются две основные задачи:
- 1. На материальную точку действует сила, определенная в каждой точке пространства. Требуется определить движение материальной точки, происходящее под действием этой силы.
- 2. В некоторой системе отсчета задано движение материальной точки. Требуется определить силу или силы, под действием которых происходит это движение.
Чтобы пояснить сущность первой из этих задач, рассмотрим уравнение Ньютона

где  — ускорение точки в некоторой неподвижной системе координат. Будем предполагать, что сила
— ускорение точки в некоторой неподвижной системе координат. Будем предполагать, что сила  действующая на материальную точку, определена в этой системе отсчета. За неподвижную систему отсчета выберем систему прямоугольных осей
действующая на материальную точку, определена в этой системе отсчета. За неподвижную систему отсчета выберем систему прямоугольных осей  (все дальнейшие рассуждения остаются справедливыми и по отношению к любой инерциальной системе). Вектор ускорения
(все дальнейшие рассуждения остаются справедливыми и по отношению к любой инерциальной системе). Вектор ускорения  будет иметь проекции
будет иметь проекции  на указанные оси координат. Обозначим проекции силы на эти же оси координат через
на указанные оси координат. Обозначим проекции силы на эти же оси координат через  Из равенства векторов
Из равенства векторов  и
и  непосредственно следует равенство их проекций, откуда получаем три скалярных уравнения движения
непосредственно следует равенство их проекций, откуда получаем три скалярных уравнения движения

которые назовем уравнениями движения в проекциях на декартовы оси координат. Впервые эти уравнения были получены Маклореном (1698—1746).
В общем случае силу, действующую на материальную точку, всегда можно представить как функцию времени, координат точки и ее скорости, т. е.

В каждом конкретном движении сила может рассматриваться как функция времени. В самом деле, если известен закон движения, т.е. известны координаты точки как функции времени

то, определяя из уравнений движения проекции силы на декартовы оси координат и подставляя значения
 взятые из закона движения, будем иметь
взятые из закона движения, будем иметь 
Иногда удобнее выразить правые части уравнений движения как функции только координат точки. Пусть, например, уравнение

может быть разрешено относительно 

Тогда вторая производная от  представится в виде
представится в виде

Например, если  то
то  откуда
откуда

Определять силу в функции только времени не всегда удобно при решении задач о движении, поэтому в общем случае силы представляют как функции времени, координат и скорости.
Можно представлять силы и как функции ускорения точки. Но тогда эти силы уже не будут определять ускорение, т. е. не будут ускоряющими в смысле Ныотона. Для такого класса сил может ‘быть построена механика, отличная от механики Ньютона.
Если действующие на точку силы заданы, то уравнения движения

представляют собой систему трех дифференциальных уравнений второго порядка относительно неизвестных функций  и общий интеграл этих уравнений содержит шесть произвольных постоянных
и общий интеграл этих уравнений содержит шесть произвольных постоянных

В каждой конкретной задаче эти постоянные определяются из начальных условий, для чего должны быть заданы в начальный момент  начальное положение и начальная скорость точки. Задача определения констант
начальное положение и начальная скорость точки. Задача определения констант  по заданным величинам
по заданным величинам  сводится к разрешению системы уравнений
сводится к разрешению системы уравнений


относительно  Для шести произвольных постоянных получим
Для шести произвольных постоянных получим

и если выполнены условия существования и единственности, то каждой системе начальных значений координат и скоростей будет отвечать одно движение.
Для определения констант  могут быть приняты и другие, так называемые граничные условия (предложенные Гамильтоном). Они сводятся к тому, что рассматривается положение материальной точки в два различных момента времени
могут быть приняты и другие, так называемые граничные условия (предложенные Гамильтоном). Они сводятся к тому, что рассматривается положение материальной точки в два различных момента времени  и
и 
При 
При 
и из этих условий определяются значения произвольных постоянных интегралов.
Вторая задача, задача определения силы по данному движению материальной точки, требует задания структуры силы, так как ускорение точки представляется и как функция времени, и как функция координат и скорости точки.
Пример с решением задачи 65.
На материальную точку действует сила, обладающая силовой функцией  Исследовать область возможного движения точки.
Исследовать область возможного движения точки.
Решение. Положение равновесия точки определяется условием, что проекции силы на оси координат равны нулю, т. е.

Таким положением в рассматриваемом случае является только начало координат. Область возможных движений точки около положения равновесия определяется неравенством

и представляет шар радиуса

чем меньше величина  тем больше радиус шара.
тем больше радиус шара.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Услуги по теоретической механике:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Теоретическая механика. В помощь студенту
Теоретическая механика – это раздел механики, в котором излагаются основные законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика является наукой, в которой изучаются перемещения тел с течением времени (механические движения). Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория пластичности, теория механизмов и машин, гидроаэродинамика) и многих технических дисциплин.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел.
Механическое взаимодействие – это такое взаимодействие, в результате которого изменяется механическое движение или изменяется взаимное положение частей тела.
Статика твердого тела
Статика — это раздел теоретической механики, в котором рассматриваются задачи на равновесие твердых тел и преобразования одной системы сил в другую, ей эквивалентную.
- Основные понятия и законы статики
Сила как вектор характеризуется точкой приложения, направлением действия и абсолютным значением. Единица измерения модуля силы – Ньютон.
Распределенная нагрузка задается силой, действующей на единицу объема (поверхности, длины).
Размерность распределенной нагрузки – Н/м 3 (Н/м 2 , Н/м).
Принятое обозначение:
 .
. .
. .
.Принятое обозначение:
 .
. Под действием пары сил тело будет совершать вращательное движение.
Проекция положительна, если направление отрезка совпадает с положительным направлением оси.
Равномерное и прямолинейное движение материальной точки является движением по инерции. Под состоянием равновесия материальной точки и твердого тела понимают не только состояние покоя, но и движение по инерции. Для твердого тела существуют различные виды движения по инерции, например равномерное вращение твердого тела вокруг неподвижной оси.
Эти две силы называются уравновешивающимися.
Вообще силы называются уравновешивающимися, если твердое тело, к которому приложены эти силы, находится в покое.
Следствие. Не нарушая состояния твердого тела, силу можно переносить по ее линии действия в любую точку тела.
Две системы сил называются эквивалентными, если одну из них можно заменить другой, не нарушая состояния твердого тела.
диагонали.
По модулю равнодействующая равна:

Следует иметь в виду, что действие — сила, приложенная к телу Б, и противодействие — сила, приложенная к телу А, не уравновешиваются, так как они приложены к разным телам.
Не следует при этом забывать, что условия равновесия, являющиеся необходимыми и достаточными для твердого тела, являются необходимыми, но недостаточными для соответствующего нетвердого тела.
- Связи и их реакции
- Гладкая поверхность ограничивает перемещение по нормали к поверхности опоры. Реакция направлена перпендикулярно поверхности.
- Шарнирная подвижная опора ограничивает перемещение тела по нормали к опорной плоскости. Реакция направлена по нормали к поверхности опоры.
- Шарнирная неподвижная опора противодействует любому перемещению в плоскости, перпендикулярной оси вращения.
- Шарнирный невесомый стержень противодействует перемещению тела вдоль линии стержня. Реакция будет направлена вдоль линии стержня.
- Глухая заделка противодействует любому перемещению и вращению в плоскости. Ее действие можно заменить силой, представленной в виде двух составляющих и парой сил с моментом.
- Момент силы относительно точки
- Абсолютное значение момента равно произведению модуля силы на кратчайшее расстояние h от центра вращения до линии действия силы. Расстояние h называют плечом силы.
- Момент считают положительным, если сила стремится вращать плечо h против хода часовой стрелки и отрицательным при вращении по ходу часовой стрелки.
- Свойства момента силы относительно точки:
1) Момент силы не изменится при переносе точки приложения силы вдоль линии действия силы.
2) Момент силы равен нулю, если линия действия силы проходит через точку приложения силы.
3) Момент равнодействующей силы относительно точки равен сумме моментов слагаемых сил относительно этой точки.,
где

 ,
, 
- Момент силы относительно оси
- Момент силы относительно оси — это момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Момент считается положительным, если с положительного конца оси поворот, который сила стремится совершить, виден происходящим против хода часовой стрелки, и отрицательным – если по ходу часовой стрелки. - Чтобы найти момент силы относительно оси, нужно:
1) Провести плоскость перпендикулярную оси z.
2) Спроецировать силуна эту плоскость и вычислить величину проекции .
3) Провести плечо h из точки пересечения оси с плоскостью на линию действия проекции силыи вычислить его длину.
4) Найти произведение этого плеча и проекции силы с соответствующим знаком. - Свойства момента силы относительно оси.
Момент силы относительно оси равен нулю, если:
1), то есть сила параллельна оси.
2) h=0, то есть линия действия силы пересекает ось.

 .
.  , то есть сила
, то есть сила - Момент пары сил
- Момент пары сил равен произведению одной силы на кратчайшее расстояние между линиями действия сил пары, которое называется плечом пары (пара сил оказывает на тело вращающее действие) ,
где:— силы, составляющие пару;
h — плечо пары.
Момент пары считают положительным, если силы стремятся вращать плечо против хода часовой стрелки. - Свойства пары сил.
1) Сумма проекций сил пары на любую ось равна нулю.
2) Не изменяя момента пары можно одновременно соответственно изменять значение сил и плечо пары.
3) Пару можно переносить в плоскости ее действия при этом действие пары на тело не изменится.
 ,
,  — силы, составляющие пару;
— силы, составляющие пару; - Преобразование сходящейся системы сил
- Равнодействующая двух сходящихся сил находится на основании аксиомы о параллелограмме сил.
Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил – способ векторного многоугольника.
Вывод: система сходящихся сил () приводится к одной равнодействующей силе . - Аналитически равнодействующая сила может быть определена через ее проекции на оси координат:
Согласно теореме: проекция равнодействующей на ось равна сумме проекций слагаемых сил на эту ось:, или в общем виде
С учетомравнодействующая определяется выражением: . - Направление вектора равнодействующей определяется косинусами углов между вектором и осями x, y, z:
 двух сходящихся сил находится на основании аксиомы о параллелограмме сил.
двух сходящихся сил находится на основании аксиомы о параллелограмме сил.  ) приводится к одной равнодействующей силе
) приводится к одной равнодействующей силе 
 , или в общем виде
, или в общем виде 
 .
.
- Преобразование произвольной системы сил
- Теорема: силу, приложенную к твердому телу, можно, не изменяя оказываемого ею действия, перенести параллельно в другую точку тела, прибавляя при этом пару сил с моментом, равным моменту переносимой силы относительно точки, в которую она переносится.
В результате указанного преобразования получается сходящаяся система сил и сумма моментов пар сил. Действие сходящейся системы сил заменяют действием суммарной силы, действие моментов — суммарным моментом.
Суммарный вектор— это главный вектор системы сил.
Суммарный момент— это главный момент системы сил.
Вывод: произвольная система сил в результате тождественного преобразования приводится к главному вектору и главному моменту системы сил. - Аналитически главный вектор и главный момент системы сил могут быть определены через их проекции на оси координат: ,
 — это главный момент системы сил.
— это главный момент системы сил.  ,
, 
- Условия равновесия систем сил
- Равновесие системы сходящихся сил
Действие системы сходящихся сил эквивалентно действию одной равнодействующей силы.
Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю.
Из формулыследует, что для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y,Z равнялась нулю: - Для равновесия плоской сходящейся системы сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y равнялась нулю:
 .
. 

- Равновесие произвольной системы сил.
- Действие произвольной системы сил эквивалентно действию главного вектора и главного момента. Для равновесия необходимо и достаточно выполнения условия: .
- Для равновесия произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси X,Y,Z и суммы моментов всех сил относительно осей X,Y,Z равнялись нулю:
- Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы сумма проекций главного вектора на оси X,Y, и алгебраическая сумма моментов сил относительно центра О были равны нулю:
 .
.

Кинематика
Кинематика — раздел теоретической механики, в котором рассматриваются общие геометрические свойства механического движения, как процесса, происходящего в пространстве и во времени. Движущиеся объекты рассматривают как геометрические точки или геометрические тела.
- Основные понятия кинематики
- Способы задания движения точки
- Задать движение точки — значит задать изменение ее положения по отношению к выбранной системе отсчета. Существуют три основные системы отсчета: векторная, координатная, естественная.
- В векторной системе положение точки относительно начала отсчета задается радиус-вектором.
Закон движения:. - В системе координат OXYZ положение точки задается тремя координатами X, Y, Z.
Закон движения: x = x(t), y = y(t); z = z(t). - В естественной системе отсчета положение точки задается расстоянием S от начала отсчета до этой точки вдоль траектории.
Закон движения:.
Движение точки, при естественном способе задания движения, определено если известны:
1) Траектория движения.
2) Начало и направление отсчета дуговой координаты.
3) Уравнение движения.
При естественном способе задания движения, в отличии от других способов, используются подвижные координатные оси, движущиеся вместе с точкой по траектории. Такими осями являются:
Касательная (τ) – направлена в сторону возрастания дуговой координаты по касательной к траектории.
Главная нормаль (n) – направлена в сторону вогнутости кривой.
Бинормаль (b) – направлена перпендикулярно к осям τ, n.
 .
. .
. - Определение кинематических характеристик точки
- Траектория точки
В векторной системе отсчета траектория описывается выражением:.
В координатной системе отсчета траектория определяется по закону движения точки и описывается выражениями z = f(x,y) — в пространстве, или y = f(x) – в плоскости.
В естественной системе отсчета траектория задается заранее. - Определение скорости точки в векторной системе координат
При задании движения точки в векторной системе координат отношение перемещения к интервалу времениназывают средним значением скорости на этом интервале времени: .
Принимая интервал времени бесконечно малой величиной, получают значение скорости в данный момент времени (мгновенное значение скорости):.
Вектор средней скоростинаправлен вдоль вектора в сторону движения точки, вектор мгновенной скорости направлен по касательной к траектории в сторону движения точки.
Вывод:скорость точки – векторная величина, равная производной от закона движения по времени.
Свойство производной:производная от какой либо величины по времени определяет скорость изменения этой величины. - Определение скорости точки в координатной системе отсчета
Скорости изменения координат точки:.
Модуль полной скорости точки при прямоугольной системе координат будет равен:.
Направление вектора скорости определяется косинусами направляющих углов:,
где— углы между вектором скорости и осями координат. - Определение скорости точки в естественной системе отсчета
Скорость точки в естественной системе отсчета определяется как производная от закона движения точки:.
Согласно предыдущим выводам вектор скорости направлен по касательной к траектории в сторону движения точки и в осяхопределяется только одной проекцией .
 называют средним значением скорости на этом интервале времени:
называют средним значением скорости на этом интервале времени:  .
.  .
.  направлен вдоль вектора
направлен вдоль вектора  в сторону движения точки, вектор мгновенной скорости
в сторону движения точки, вектор мгновенной скорости  направлен по касательной к траектории в сторону движения точки.
направлен по касательной к траектории в сторону движения точки.  .
.  .
.  ,
,  — углы между вектором скорости и осями координат.
— углы между вектором скорости и осями координат. .
.  определяется только одной проекцией
определяется только одной проекцией  .
.- Ускорение точки
- По определению ускорение характеризует изменение скорости, то есть скорость изменения скорости.
- Ускорения точки в векторной системе отсчета
На основании свойства производной:.
Вектор скорости может изменяться по модулю и направлению.
Вектор ускорения направлен по линии приращения вектора скорости, т. е. в сторону искривления траектории. - Ускорение точки в координатной системе отсчета
Ускорение изменения координат точки равно производной по времени от скоростей изменения этих координат:.
Полное ускорение в прямоугольной системе координат будет определяться выражением:.
Направляющие косинусы вектора ускорения:. - Ускорение точки в естественной системе отсчета Приращение вектора скорости можно разложить на составляющие, параллельные осям естественной системы координат: .
Разделив левую и правую части равенства на dt, получим:,
где— тангенциальное ускорение; — нормальное ускорение;
R — радиус кривизны траектории в окрестности точки.
 .
.  .
.  .
.  .
. можно разложить на составляющие, параллельные осям естественной системы координат:
можно разложить на составляющие, параллельные осям естественной системы координат:  .
.  ,
,  — тангенциальное ускорение;
— тангенциальное ускорение;  — нормальное ускорение;
— нормальное ускорение; - Кинематика твердого тела
- В кинематике твердых тел решаются две основные задачи:
1) задание движения и определение кинематических характеристик тела в целом;
2) определение кинематических характеристик точек тела. - Поступательное движение твердого тела
Поступательное движение — это движение, при котором прямая, проведенная через две точки тела, остается параллельной ее первоначальному положению.
Теорема:при поступательном движении все точки тела движутся по одинаковым траекториям и имеют в каждой момент времени одинаковые по модулю и направлению скорости и ускорения.
Вывод:поступательное движение твердого тела определяется движением любой его точки, в связи с чем, задание и изучение его движения сводится к кинематике точки. - Вращательное движение твердого тела вокруг неподвижной оси
Вращательное движение твердого тела вокруг неподвижной оси — это движение твердого тела, при котором две точки, принадлежащие телу, остаются неподвижными в течение всего времени движения.
Положение тела определяется углом поворота. Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
Закон вращательного движения тела вокруг неподвижной оси.
Угловую скорость и угловое ускорение тела определим методом дифференцирования:— угловая скорость, рад/с; — угловое ускорение, рад/с².
Если рассечь тело плоскостью перпендикулярной оси, выбрать на оси вращения точку С и произвольную точку М, то точка М будет описывать вокруг точки С окружность радиуса R. За время dt происходит элементарный поворот на угол, при этом точка М совершит перемещение вдоль траектории на расстояние .
Модуль линейной скорости:.
Ускорение точки М при известной траектории определяется по его составляющим: ,
где.
В итоге, получаем формулы
тангенциальное ускорение:;
нормальное ускорение:.
 . Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
. Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)  .
.  — угловая скорость, рад/с;
— угловая скорость, рад/с;  — угловое ускорение, рад/с².
— угловое ускорение, рад/с².  , при этом точка М совершит перемещение вдоль траектории на расстояние
, при этом точка М совершит перемещение вдоль траектории на расстояние  .
.  .
.  ,
,  .
.  ;
;  .
.- Плоско-параллельное движение твердого тела
- Плоско-параллельное движение твердого тела — это движение твердого тела, при котором все его точки перемещаются в плоскостях, параллельных одной неподвижной плоскости.
Движение сечения S в своей плоскости можно рассматривать как сложное, состоящее из двух элементарных движений:
1) поступательного и вращательного;
2) вращательного относительно подвижного (мгновенного) центра. - В первом варианте движение сечения может быть задано уравнениями движения одной его точки (полюса) и вращением сечения вокруг полюса.
В качестве полюса может быть принята любая точка сечения.
Уравнения движения запишутся в виде:.
Ускорение точки движущейся плоской фигуры складывается из ускорения полюса относительно неподвижной системы отсчета и ускорения за счет вращательного движения вокруг полюса. - Во втором варианте движение сечения рассматривается как вращательное вокруг подвижного (мгновенного) центра P.
В этом случае скорость любой точки В сечения будет определяться по формуле для вращательного движения:.
Угловая скорость вокруг мгновенного центра Р может быть определена если известна скорость какой либо точки сечения, например точки А.. - Положение мгновенного центра вращения может быть определено на основании следующих свойств:
1) вектор скорости точки перпендикулярен радиусу;
2) модуль скорости точки пропорционален расстоянию от точки до центра вращения ();
3) скорость в центре вращения равна нулю. - Теорема:проекции скоростей двух точек твердого тела на прямую, проведенную через эти точки, равны между собой и одинаково направлены.
Доказательство: расстояние АВ изменяться не может, следовательно,не может быть больше или меньше .
Вывод:.
 .
. 

 .
.  .
. );
);  не может быть больше или меньше
не может быть больше или меньше  .
.  .
.- Сложное движение точки
- Относительное движение — это движение точки относительно подвижной системы.
Переносное движение — это движение точки вместе с подвижной системой.
Абсолютное движение — это движение точки относительно неподвижной системы.
Соответственно называют скорости и ускорения:— относительные; — переносные; — абсолютные. - Абсолютная скорость точки равна векторной сумме относительной и переносной скоростей (согласно теореме о сложении скоростей): .
Абсолютное значение скорости определяется по теореме косинусов:. - Ускорение по правилу параллелограмма определяется только при поступательном переносном движении . .
- При непоступательном переносном движении появляется третья составляющая ускорения, называемое поворотным или кориолисовым. ,
где.
Кориолисово ускорение численно равно:,
где– угол между векторами и .
Направление вектора кориолисова ускорения удобно определять по правилу Н.Е. Жуковского: векторспроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения.
 — относительные;
— относительные;  — переносные;
— переносные;  — абсолютные.
— абсолютные. .
.  .
. .
.  .
. ,
,  .
.  ,
,  – угол между векторами
– угол между векторами  и
и  .
. Динамика
Динамика — это раздел теоретической механики, в котором изучаются механические движении материальных тел в зависимости от причин, их вызывающих.
- Основные понятия динамики

где mk, xk, yk, zk — масса и координаты k-той точки механической системы, m — масса системы.
В однородном поле тяжести положение центра масс совпадает с положением центра тяжести.
Момент инерции материальной точки относительно оси равен произведению массы точки на квадрат расстояния точки от оси:
 .
. Момент инерции системы (тела) относительно оси равен арифметической сумме моментов инерции всех точек:


 ,
, где
 — ускорение центра масс тела.
— ускорение центра масс тела. , равная произведению вектора силы
, равная произведению вектора силы  на бесконечно малый промежуток времени dt:
на бесконечно малый промежуток времени dt:  .
. Полный импульс силы за Δt равен интегралу от элементарных импульсов:
 .на бесконечно малое перемещение
.на бесконечно малое перемещение  .
. Скалярное произведение векторов равно произведению их модулей на косинус угла между направлениями векторов:
 ,
, где α — угол между направлениями векторов перемещения и силы.
на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению:  .
. Единица измерения работы — Джоуль (1 Дж = 1 Н·м).
 , равная произведению массы m на её скорость
, равная произведению массы m на её скорость  :
:  .
. или
или  ,
, где m — масса механической системы,
 — вектор скорости центра масс системы.
— вектор скорости центра масс системы. .
. .
.- Аксиомы динамики
- Первая аксиома — это закон инерции.
Если на свободную материальную точку не действуют никакие силы или действует уравновешенная система сил, то точка будет находиться в состоянии покоя или равномерного прямолинейного движения. - Вторая аксиома — закон пропорциональности ускорения.
Ускорение, сообщаемое материальной точке действующей на неё силой, пропорционально этой силе и по направлению совпадает с направлением силы:— это основной закон динамики. - Третья аксиома — это закон противодействия.
Силы, с которыми действуют друг на друга две материальные точки, равны по модулю и направлены вдоль прямой, соединяющей эти точки, в противоположные стороны:. - Четвертая аксиома — закон независимости действия сил.
При действии на материальную точку системы сил полное ускорение этой точки равно геометрической сумме ускорений от действия каждой силы:
 — это основной закон динамики.
— это основной закон динамики. .
.
- Дифференциальные уравнения динамики
- Дифференциальные уравнения движения точки связывают ускорение точки с действующими на нее силами. Фактически дифференциальные уравнения являются записью основного закона динамики в явной дифференциальной форме.
Для абсолютного движения точки (движение в инерциальной системе отсчета) дифференциальное уравнение имеет вид:. - Векторное уравнение может быть записано в проекциях на оси прямоугольной инерциальной системы координат:
- При известной траектория движения точки уравнение может быть записано в проекциях на оси естественной системы координат:
С учетом того, что,
где— тангенциальное ускорение; — нормальное ускорение,
уравнения примут вид:
 .
.

 ,
,  — тангенциальное ускорение;
— тангенциальное ускорение;  — нормальное ускорение,
— нормальное ускорение, 
- Общие теоремы динамики
- Общие теоремы динамики устанавливают зависимость между мерами механического движения и механического взаимодействия. Выводы теорем являются результатом тождественного преобразования основного закона динамики.
- Теорема об изменении количества движения: изменение количества движения материальной точки (механической системы) за конечный промежуток времени равно сумме импульсов внешних сил за тот же промежуток времени — для материальной точки; — для механической системы.
- Теорема об изменении кинетической энергии: изменение кинетической энергии точки (механической системы) при её перемещении равно сумме работ всех действующих внешних сил на этом перемещении — для материальной точки; — для механической системы.
- Кинетическая энергия механической системы определяется в соответствии с , при этом для твердых тел выведены следующие зависимости: — при поступательном движении тела; — при вращательном движении тела; — при плоско-параллельном движении тела.
- Момент инерции цилиндра относительно его оси: .
- Момент инерции стержня относительно оси z: .
- Момент инерции прямоугольной пластины относительно осей х и y: .
- Момент инерции шара определяется по формуле: .
- Работа силы тяжести: ,
где P — сила тяжести;
h — изменение положения тела по вертикали. - Работа силы при вращательном движении тела ,
где M — момент силы,
w — угловая скорость тела.
Следует иметь в виду, что работа, как скалярная величина, может быть положительной или отрицательной. Работа будет положительной если направление действия силы совпадает с направлением движения.
 — для материальной точки;
— для материальной точки;  — для механической системы.
— для механической системы. — для материальной точки;
— для материальной точки;  — для механической системы.
— для механической системы. — при поступательном движении тела;
— при поступательном движении тела;  — при вращательном движении тела;
— при вращательном движении тела;  — при плоско-параллельном движении тела.
— при плоско-параллельном движении тела. .
. .
. .
. .
. ,
, - Принцип Даламбера
- Формулировка принципа Даламбера: если в любой момент времени к действующим на точку силам присоединить силы инерции, то полученная система сил будет уравновешенной: .
- Для механической системы: .
 .
. .
.Примеры решения задач
Решение примеров по теме: «Статика твердого тела»
Пример 1. Условия равновесия
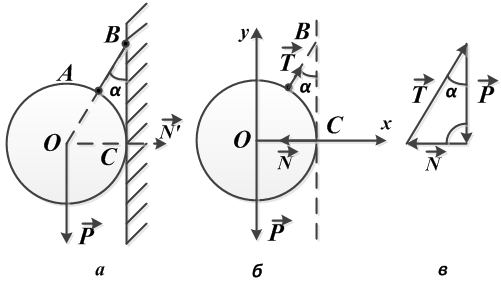
Висящий на нити, под углом в сорок пять градусов к гладкой стене шар весом в десять Ньютон, находится в состоянии равновесия (рис. а). Необходимо определить давление однородного шара на гладкую стенку и натяжение нити.
Дано: P = 10 Н; α = 45°
Найти: N, T — ?
Решение.
Отбрасываем связи, а их действие на шар заменяем реакциями.
Реакция стенки N направлена перпендикулярно стенке (от точки касания С к центру шара О), реакция нити Т — вдоль нити от точки А к точке В.
Тем самым выявляется полная система сил, приложенных к покоящемуся шару.
Это система сил, сходящихся в центре О шара, и состоящая из веса шара Р (активная сила), реакции стенки N и реакции нити Т (рис. б).
Реакции N и Т по величине неизвестны. Для их определения следует воспользоваться условиями равновесия (в той или иной форме — геометрической, аналитической).
При геометрическом способе решения строится замкнутый многоугольник сил и используются соотношения школьной геометрии (теорема синусов, теорема косинусов, теорема Пифагора и т.д.).
В данном случае это замкнутый силовой треугольник (рис. в), из которого получаем:

После подстановки в формулы числовых значений, получим:  .
.
Ответ:  .
.
Решение примеров по теме: «Кинематика»
Пример 2. Уравнение траектории точки
Дано:
Движение точки задано уравнениями  ;
;
(x, у — в сантиметрах, t — в секундах).
Найти: уравнение траектории точки в координатной форме.
Решение. Для определения уравнения траектории из уравнений движения исключаем время t. Для этого из первого уравнения выражаем  и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:
и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:  .
.
Опуская промежуточные выражения, получаем уравнение траектории:  .
.
 Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Ответ: .
Решение примеров по теме: «Динамика»
Пример 3. Основной закон динамики точки
Свободная материальная точка, масса которой десять килограмм, движется прямолинейно с ускорением пол метра в секунду в квадрате. Определить силу, приложенную к точке.
Дано: m = 10 кг; a = 0,5 м/с 2 .
Найти: F — ?
Решение.
Согласно основному закону динамики:  .
.
Подставив значения в формулу, получим: 
Ответ: сила, сообщающая массе, равной 10 кг,
ускорение 0,5 м/с 2 , равна 5 Н.
В помощь студенту
- Формулы, правила, законы, теоремы, уравнения, примеры решения задач
Список литературы:
Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах.
Буторин Л.В., Бусыгина Е.Б. Теоретическая механика. Учебно-практическое пособие.
http://natalibrilenova.ru/teormeh-dinamika-uskorenie-statika-kinematika/
http://electrichelp.ru/teoreticheskaya-mexanika-v-pomoshh-studentu/