Общее выражение поверхности вращения
Сфера
Метод сечений
Эллипсоиды
Цели занятия:изучить понятие поверхностей второго порядка; на основе полученных знаний по теме «Кривые второго порядка»; изучить метод сечений и научиться строить поверхности второго порядка.
Роль и место лекции
В предыдущих лекциях были даны такие понятия аналитической геометрии, как кривые второго порядка, плоскость и прямая в пространстве. Понимание этих тем особенно важно для восприятия данной лекции. Она позволит сформировать математическое пространственное мышление. Для лучшего усвоения материала необходимо рассматривать пространственные объекты в сечениях или в разрезе. Когда сформируется представление о геометрическом объекте, необходимо представить его в целом.
Предложенный материал особенно важен для тех специальностей, где необходимо строить геометрические модели объектов. Например, в географии при моделировании планетарных поверхностей и их участков, моделировании объемных тел залежей ископаемых; в программировании при компьютерной анимации (понятие «полигон» непосредственно связано с геометрическими фигурами в пространстве); в астрономии при построении траекторий движения космических тел; в биологии в вопросах, связанных с необходимостью исследования функций многих переменных, например зависимости популяции от среднегодовой температуры и широты местности, а так же при построении эквипотенциальных поверхностей и линий уровня.
Общее выражение поверхности вращения
Вывод уравнения поверхности
Определение 1
Поверхности второго порядка – это такие поверхности, которые описываются алгебраическими уравнениями второго порядка.
Поверхность вращения – поверхность, образованная вращением плоской кривой вокруг координатной оси.
Пусть дано уравнение кривой  (рис. 1):
(рис. 1):
 , (1)
, (1)
где  – текущие координаты кривой L. Т. е. Z=0 Образуем поверхность вращением L вокруг оси Oy. Возьмем некоторую точку
– текущие координаты кривой L. Т. е. Z=0 Образуем поверхность вращением L вокруг оси Oy. Возьмем некоторую точку  на образованной поверхности
на образованной поверхности  . Проведем через эту точку плоскость
. Проведем через эту точку плоскость  . Обозначим
. Обозначим  – точка пересечения этой плоскости с осью Oy, а
– точка пересечения этой плоскости с осью Oy, а  – точка пересечения этой плоскости с кривой L. Ординаты трех точек равны, поскольку лежат в одной плоскости , т. е.
– точка пересечения этой плоскости с кривой L. Ординаты трех точек равны, поскольку лежат в одной плоскости , т. е.  . Очевидно
. Очевидно  или
или  ,
,
 , или
, или  откуда
откуда  . (2)
. (2)
Подставим (2) в (1) получим уравнение
 (3)
(3)
с тремя переменными  , являющихся координатами точек поверхности, следовательно (3) есть уравнение поверхности вращения
, являющихся координатами точек поверхности, следовательно (3) есть уравнение поверхности вращения  . Сравнивая (1) и (3) можно определить правило образования поверхности вращения.
. Сравнивая (1) и (3) можно определить правило образования поверхности вращения.
1.2. Правило образования поверхности вращения
Чтобы из уравнения кривой получить уравнение поверхности вращения надо в уравнении кривой оставить неизменной переменную, одноименную с осью вращения, а другую заменить корнем квадратным из суммы квадратов заменяемой переменной и недостающей в уравнении кривой.
Найти уравнение поверхности, образованной  . Будем вращать кривую вокруг оси Ox. Согласно правилу образованная поверхность будет описываться уравнением
. Будем вращать кривую вокруг оси Ox. Согласно правилу образованная поверхность будет описываться уравнением  или
или  . Это уравнение сферы с центром в начале координат, R – радиус.
. Это уравнение сферы с центром в начале координат, R – радиус.
Сферой называется геометрическое место точек пространства, равноудаленных от одной точки – центра сферы.
Зададим центр сферы  , R – радиус. Тогда согласно определению
, R – радиус. Тогда согласно определению  определим выражение
определим выражение 

 или
или
 . (4)
. (4)
Это уравнение сферы в каноническом виде. Раскроем скобки. Тогда уравнение (3) запишем в виде общего

 алгебраического уравнения второго порядка. Т. е. сфера принадлежит к уравнениям второго порядка. Чтобы от общего уравнения перейти к каноническому надо выделить полные квадраты .
алгебраического уравнения второго порядка. Т. е. сфера принадлежит к уравнениям второго порядка. Чтобы от общего уравнения перейти к каноническому надо выделить полные квадраты .
Признаки, характеризующие уравнение сферы:
— коэффициенты при квадратах текущих координат равны;
— отсутствуют члены, содержащие произведения текущих координат.
Изобразить тело, ограниченное поверхностями:  ,
,  ,
,  .
.
Решение. В первом уравнении выделим полный квадрат  или
или  . Это сфера в центром
. Это сфера в центром  . Уравнение – плоскость, проходящая через начала координат и ось
. Уравнение – плоскость, проходящая через начала координат и ось 
 . Тело отсекаемое этими поверхностями имеет вид (рис. 2).
. Тело отсекаемое этими поверхностями имеет вид (рис. 2).
3. Метод сечений
Этот метод позволяет определить вид поверхности и изобразить ее. Метод сечений состоит в следующем.
1. Находят уравнения линий пересечения поверхности с координатными плоскостями или плоскостями параллельными им. При этом необходимо решать систему уравнений.
2. Изображая каждую линию сечения, получают изображение поверхности.
3. Два одинаковых типа сечений дают название поверхности, а третье сечение, отличное от двух одинаковых, дает определение к названию. Например, если в сечениях две параболы и один эллипс, следовательно, поверхность эллиптический параболоид.
Получим поверхность, вращая кривую  – эллипс вокруг оси
– эллипс вокруг оси  . Согласно правилу, уравнение поверхности будет иметь вид
. Согласно правилу, уравнение поверхности будет иметь вид

 . (5)
. (5)
Для исследования этой поверхности применим метод сечений.
 1. Сечение плоскостью
1. Сечение плоскостью  , т. е. , тогда
, т. е. , тогда
 или
или  – эллипс.
– эллипс.
2. Сечение плоскостью  , т. е.
, т. е.  , тогда
, тогда
 или
или  – окружность.
– окружность.
3. Сечение плоскостью  , т. е.
, т. е.  , тогда
, тогда
 или
или  – эллипс.
– эллипс.
Два эллипса, одна окружность, следовательно, это эллипсоид вращения рис. 3. Если эллипсоид вращения деформирован сжатием или растяжением в области кругового сечения, то получается трехосный эллипсоид или эллиптический эллипсоид
 .
.
4.1. Однополостный гиперболоид
 Получим поверхность, вращая кривую
Получим поверхность, вращая кривую  – гиперболу вокруг оси
– гиперболу вокруг оси  . Согласно правилу уравнение поверхности будет иметь вид
. Согласно правилу уравнение поверхности будет иметь вид

 . (6)
. (6)
Для исследования этой поверхности применим метод сечений.
1. Сечение плоскостью , т. е. , тогда
 или
или
 – окружность.
– окружность.
2. Сечение плоскостью , т. е. , тогда
 или
или  – гипербола.
– гипербола.
3. Сечение плоскостью , т. е. , тогда
 или
или  – гипербола.
– гипербола.
То есть это гиперболоид вращения рис. 4.
4.2. Двуполостный гиперболоид
Получим поверхность, вращая кривую  – гиперболу вокруг оси . Уравнение поверхности будет иметь вид
– гиперболу вокруг оси . Уравнение поверхности будет иметь вид

 . (7)
. (7)
Для исследования этой поверхности применим метод сечений.
1. Сечение плоскостью , т. е. , тогда
 или
или  – гипербола.
– гипербола.
2. Сечение плоскостью  , поскольку при решений нет (мнимая окружность), поэтому делаем сечение параллельной плоскостью, тогда
, поскольку при решений нет (мнимая окружность), поэтому делаем сечение параллельной плоскостью, тогда
 или
или  – окружность. Отметим, что при
– окружность. Отметим, что при
3. Сечение плоскостью , т. е. , тогда
 или
или  – гипербола.
– гипербола.
Следовательно, это гиперболоид вращения рис. 5.
 4.3. Эллиптический гиперболоид
4.3. Эллиптический гиперболоид
Если гиперболоид вращения деформирован сжатием или растяжением в области кругового сечения, то получается эллиптический гиперболоид
 ;
;
 .
.
В лекции дан метод сечений, используемый при построении поверхностей второго порядка. Понимание предложенного материала важно для изучения следующей лекции, посвященной параболоидам, цилиндрическим и коническим поверхностям. Важно понять, что аналитическая геометрия в пространстве отличается от аналитической геометрии на плоскости только лишней размерностью. Очевидно, что при необходимости можно рассматривать геометрические законы и в n-мерном пространстве. С точки зрения теории множеств поверхность – это отображение элементов множества декартовой плоскости (или упорядоченных пар) в элементы множества действительных чисел.
Отметим наиболее важное:
 — поверхности второго порядка описываются уравнениями второго порядка;
— поверхности второго порядка описываются уравнениями второго порядка;
— поверхности вращения образуются вращением плоской кривой второго порядка вокруг координатной оси;
— из уравнения кривой можно получить уравнение поверхности;
— если вращение осуществлять не по круговой, а по эллиптической траектории, то можно получить эллиптические поверхности;
— метод сечений заключается в рассмотрении кривых, образуемых при сечении поверхности некоторыми плоскостями
1. Баврин И.И. Высшая математика. – М.: Просвещение, 1980.
2. Ефимов Н.В. Краткий курс аналитической геометрии. – М.: Физматлит, 2002.
Уравнения поверхностей вращения и их названия
Многое, что окружает нас в жизни, если смотреть с позиции геометрии, — это линии и поверхности простых и сложных форм. Поверхности широко используются в различных областях науки и техники при создании очертаний различных технических форм или как объекты инженерных исследований.
Основные понятия и определения
Поверхность как объект инженерного исследования может быть задана следующими основными способами: а) уравнением; б) каркасом; в) определи гелем; г) очерком.
Составлением уравнений поверхностей занимается аналитическая геометрия; она рассматривает поверхность как множество точек, координаты которых удовлетворяют уравнению вида F (х,у, z) = 0.
В начертательной геометрии поверхность на чертеже задается каркасом, определителем, очерком.
При каркасном способе поверхность задастся совокупностью некоторого количества линий, принадлежащих поверхности. В качестве линий, образующих каркас, как правило, берут семейство линий, получающихся при пересечении поверхности рядом параллельных плоскостей. Этот способ используется при проектировании кузовов автомобилей, в самолето — и судостроении, в топофафии и т. п.
Поверхность, образованная движущейся в пространстве линией, на чертеже может быть задана определителем поверхности.
Определителем поверхности называется совокупность геометрических фигур и связей между ними. позволяющих однозначно образовать поверхность в пространстве и задать ее на чертеже.
Способ образования поверхности движущейся в просфанстве линией называют кинематическим.
Линию, образующую при своем движении в пространстве данную поверхность называют образующей (производящей).
Образующая при своем движении может изменять свою форму или оставаться неизменной. Закон перемещения образующей можно, в частности, задать неподвижными линиями, на которые при своем движении опирается образующая. Эти линии называются направляющими.
На чертеже при задании поверхности ее определителем строятся проекции направляющих линий, указывается, как находятся проекции образующей линии. Построив ряд положений образующей линии, получим каркас поверхности. Пример образования поверхности кинематическим способом показан на рис. 96.

В качестве образующей а этой поверхности взята плоская кривая. Закон перемещения образующей задан двумя направляющими m и n и плоскостью а. Образующая а скользит по направляющим, все время оставаясь параллельной плоскости a.
Различают геометрическую и алгоритмическую часть определителя поверхности. Определитель имеет следующую форму записи Ф( Г ) [ А ], где Ф — обозначение поверхности; ( Г ) -геометрическая часть определителя, в ней перечисляются все геометрические фигуры, участвующие в образовании поверхности и задании ее на чертеже; [А ] — алгоритмическая часть определителя — в ней записывается алгоритм формирования поверхности.
Определитель поверхности выявляется путем анализа способов образования поверхности или се основных свойств. В общем случае одна и та же поверхность может быть образована несколькими способами, поэтому может иметь несколько определителей. Обычно из всех способов образования поверхности выбирают простейший. Например, боковая поверхность прямого кругового цилиндра может быть образована четырьмя способами (рис. 97):

а) как след, оставляемый в пространстве прямой а при ее вращении вокруг оси m (рис. 97,а).
Определитель поверхности — Ф ( а,m ) [ A1]:
б) как след, оставляемый в пространстве кривой линией b при ее вращении вокруг оси m (рис. 97,6).
Определитель поверхности — Ф ( b,m ) [ A2];
в) как след, оставляемый в пространстве окружностью с при поступательном перемещении ее центра О вдоль оси m. при этом плоскость окружности все время остается перпендикулярной к этой оси (рис. 97,в).
Определитель поверхности — Ф ( а,m ) [ A3]:
г) как огибающую всех положений сферической поверхности р постоянного радиуса, центр которой перемещается по оси m (рис.97,г).
Определитель поверхности —Ф ( p,m ) [ A4].
Наиболее простым из рассматриваемых будет определитель Ф ( а,m ) [ A1].
Задание поверхности на чертеже каркасом или определителем не всегда обеспечивает наглядность ее изображения. В некоторых случаях поверхность целесообразнее задавать ее очерком.
Очерком поверхности называется проекция проецирующей цилиндрической поверхности, огибающей заданную поверхность.
По известному уравнению поверхности или се определителю, или очерку всегда можно построить каркас поверхности.
Многообразие поверхностей требует их систематизации. Для поверхностей, образованных кинематическим способом в основу систематизации положен их определитель.
В зависимости от вида образующей поверхности разделяются на два класса:
класс 1 — поверхности нелинейчатые (образующая — кривая линия);
класс 2 — поверхности линейчатые (образующая — прямая линия).
Поверхности нелинейчатые
Поверхности нелинейчатые подразделяют на поверхности с образующей переменного вида (изменяющей свою форму в процессе движения) и на поверхности с образующей постоянного вида.
Нелинейчатые поверхности с образующей переменного вида
К нелинейчатым поверхностям с образующей переменного вида относятся:
1. Поверхность общего вида. Такая поверхность образуется перемещением образующей переменного вида а по криволинейной направляющей т (рис. 98).

2. Каналовая поверхность. Эта поверхность образуется движением плоской замкнутой линии, плоскость которой определенным образом ориентирована в пространстве (рис. 99).

Площадь, ограниченная образующей, монотонно изменяется в процессе ее движения но направляющей. Например, каналовую поверхность имеет переходный участок, соединяющий два трубопровода разной формы.
3. Циклическая поверхность — частный случай каналовой поверхности, когда образующая — окружность, радиус которой монотонно изменяется (рис. 100).

Примером циклической поверхности может быть корпус духового музыкального инструмента.
Нелинейчатые поверхности с образующей постоянного вида
К нелинейчатым поверхностям с образующей постоянного вида относятся:
1. Поверхность общего вида. Такая поверхность может быть образована движением произвольной кривой линии а по направляющей m (рис. 101).

2. Трубчатая поверхность. Образующей трубчатой поверхности является окружность постоянного радиуса. Плоскость окружности при ее движении остается перпендикулярной к направляющей (рис. 102).

Примером трубчатой поверхности может быть поверхность проволоки круглого сечения.
Поверхности линейчатые
Линейчатые поверхности образуются движением прямой (образующей) по заданному закону. В зависимости от закона движения образующей получаем различные линейчатые поверхности.
Линейчатые поверхности с тремя направляющими
К линейчатым поверхностям с тремя направляющими относятся:
1. Поверхность косого цилиндра. Такая поверхность может быть образована движением прямолинейной образующей по трем криволинейным направляющим (рис. 103).

2. Поверхность дважды косого цилиндроида. Эта поверхность образуется в том случае, когда две направляющие кривые, а третья -прямая линия (рис. 104).

3. Поверхность дважды косого коноида получается в том случае, когда одна из направляющих — кривая, а две других — прямые линии (рис. 105).

4. Поверхность однополостного гиперболоида образуется в случае, когда направляющие — три скрещивающиеся прямые, параллельные одной плоскости. Пример. Найти недостающие проекции точек А» и В’ принадлежащих поверхности однополостного гиперболоида (рис. 106).

P e ш е н и е. Для определения недостающей проекции точки, воспользуемся признаком принадлежности ее поверхности: точка принадлежит поверхности; если она принадлежит какой-либо линии этой поверхности.
Для данной линейчатой поверхности при построении проекций образующей сначала задается ее горизонтальная проекция, а затем находится фронтальная. Поэтому через известную горизонтальную проекцию точки A’ проводим проекцию образующей а’2, определяем ее фронтальную проекцию а2«, на которой по линии связи найдем искомую фронтальную проекцию точки A».
Для определения недостающей горизонтальной проекции точки В’ выполним следующие построения:
1. Построим ряд образующих заданной поверхности a1,a2,a3,a4 .
2. На фронтальной плоскости проекций через известную проекцию точки В» проведем проекцию вспомогательной линии b’ принадлежащей заданной поверхности и пересекающей образующие.
3. По известным фронтальным проекциям точек пересечения проекции линии b» с образующими а1«, а2«, а3«, а4« найдем горизонтальные проекции этих точек. Соединив их плавной линией, построим горизонтальную проекцию вспомогательной линии b’ на которой по линии связи найдем искомую проекцию точки В’.
К линейчатым поверхностям с тремя направляющими относятся, например, поверхности гребных винтов судов и пропеллеров самолетов. В архитектуре и строительстве они используются при возведении крытых зданий стадионов, рынков, вокзалов.
Линейчатые поверхности с двумя направляющими и плоскостью параллелизма (поверхности Каталана)
К линейчатым поверхностями с двумя направляющими плоскостью параллелизма относятся:
1. Поверхность прямого цилиндроида. Такая поверхность может быть образована движением прямолинейной образующей по двум направляющим m и n в том случае, когда они — гладкие кривые линии, причем одна из них — плоская кривая, плоскость которой β перпендикулярна плоскости параллелизма a (n ⊂ β, β ⊥ a) (рис. 107).

2. Поверхность прямого коноида. Эта поверхность получается в том случае, когда одна направляющая — кривая линия, а вторая -прямая, причем она перпендикулярна плоскости параллелизма
a( n ⊥ a) (рис. 108). Поверхность прямого коноида используется в гидротехническом строительстве для формирования поверхности устоев мостовых опор.

3. . Такая поверхность образуется в том случае, когда две направляющие — скрещивающие прямые (рис. 109). Поверхность косой плоскости применяется в инженерно — строительной практике для формирования поверхностей откосов, насыпей, железнодорожных и автомобильных дорог, набережных, гидротехнических сооружений в местах сопряжения имеющих различные углы наклона.

Линейчатые поверхности с одной направляющей (торсы)
Торсы являются развертываемыми поверхностями — они могут быть совмещены с плоскостью без складок и разрывов. К торсовым поверхностям относятся:
1. Поверхность с ребром возврата. Эта поверхность образуется движением прямолинейной образующей, во всех своих положениях касательной к пространственной кривой, называемой ребром возврата.
2. Цилиндрическая поверхность. Данная поверхность образуется движением прямолинейной образующей, скользящей по кривой направляющей и остающейся параллельной своему исходному состоянию (рис.110).

3. Коническая поверхность. Эта поверхность образуется движением прямолинейной образующей, скользящей по кривой направляющей и проходящей во всех своих положениях через одну и ту же неподвижную точку S (рис. 111).
Лекция 7. Поверхности
7.1. Поверхности. Образование и задание поверхности на чертеже
Поверхности составляют широкое многообразие объектов трехмерного пространства. Инженерная деятельность человека связана непосредственно с проектированием, конструированием и изготовлением различных поверхностей. Большинство задач прикладной геометрии сводится к автоматизации проектно-конструкторского процесса и воспроизведения сложных поверхностей. Способы формообразования и отображения поверхностей составляют основу инструментальной базы трехмерного моделирования современных систем автоматизированного проектирования.
Рассматривая поверхности как непрерывное множество точек, между координатами которых может быть установлена зависимость, определяемая уравнением вида F(x,y,z)=0, можно выделить алгебраические поверхности (F(x,y,z)— многочлен n-ой степени и трансцендентные (F(x,y,z)— трансцендентная функция.
Если алгебраическая поверхность описывается уравнением n-й степени, то поверхность считается поверхностью n-го порядка. Произвольно расположенная секущая плоскость пересекает поверхность по кривой того же порядка (иногда распадающейся или мнимой), какой имеет исследуемая поверхность. Порядок поверхности может быть определен также числом точек её пересечения с произвольной прямой, не принадлежащей целиком поверхности, считая все точки (действительные и мнимые).
Поверхность можно рассматривать, как совокупность последовательных положений l1,l2… линии l перемещающейся в пространстве по определенному закону (Рисунок 7.1). В процессе образования поверхности линия l может оставаться неизменной или менять свою форму — изгибаться или деформироваться. Для наглядности изображения поверхности на эпюре Монжа закон перемещения линии l целесообразно задавать графически в виде одной линии или целого семейства линий (m, n, p…).
Подвижную линию принято называть образующей (li), неподвижные – направляющими (m). Такой способ образования поверхности принято называть кинематическим .
Примером такого способа могут служить все технологические процессы обработки металлов режущей кромкой, когда поверхность изделия несёт на себе «отпечаток» режущей кромки резца, т.е. её поверхность можно рассматривать как множество линий конгруэнтных профилю резца.
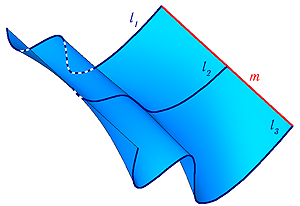
Рисунок 7.1 — Кинематическая поверхность
По виду образующей различают поверхности линейчатые и нелинейчатые , образующая первых – прямая линия, вторых – кривая.
Линейчатые поверхности в свою очередь разделяют на развертывающиеся , которые можно без складок и разрывов развернуть на плоскость и неразвертывающиеся .
Значительный класс поверхностей формируется движением окружности постоянного или переменного радиуса. Такие поверхности носят название циклические (Рисунок 7.2).
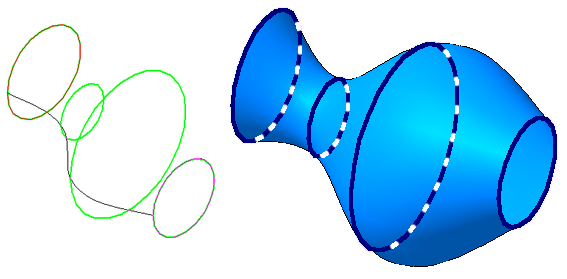
Рисунок 7.2 — Циклическая поверхность
Если группировать поверхности по закону движения образующей линии, то большинство встречающихся в технике поверхностей можно разделить на:
- поверхности вращения;
- винтовые поверхности;
- поверхности с плоскостью параллелизма;
- поверхности параллельного переноса.
Особое место занимают такие нелинейные поверхности, образование которых, не подчинено ни какому закону. Оптимальную форму таких поверхностей определяют теми физическими условиями, в которых они работают и устанавливают форму экспериментально (поверхности лопастей турбин, обшивка каркасов морских судов и самолетов).
Для графического изображения поверхности на чертеже используется её каркас.
Множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества, называется каркасом поверхности .
Поверхность может быть задана и конечным множеством точек, которое принято называть точечным каркасом .
Проекции каркаса могут быть построены, если задан определитель поверхности – совокупность условий, задающих поверхность в пространстве и на чертеже.
Различают две части определителя: геометрическую и алгоритмическую.
Геометрическая часть определителя представляет собой набор постоянных геометрических элементов (точек, прямых, плоскостей и т.п.), которые могут и не входить в состав поверхности.
Вторая часть – алгоритмическая (описательная) – содержит перечень операций, позволяющий реализовать переход от фигуры постоянных элементов к непрерывному каркасу.
Например, циклическая поверхность, каркас которой состоит из восьмиугольников (Рисунок 7.3), может быть задан следующим образом:
- Геометрическая часть определителя: три направляющих l, m, n.
- Алгоритмическая часть: выбираем плоскость α; находим точки А, В, С, в которых α пересекает соответственно направляющие l, m, n. Строим восьмиугольник, определяемый тремя найденными точками. Переходим к следующей плоскости и повторяем построение
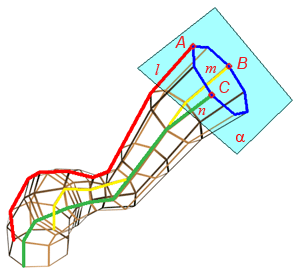
Рисунок 7.3 –Образование циклической поверхности
7.2. Поверхности вращения
Поверхностями вращения называются поверхности, полученные вращением образующей вокруг неподвижной оси (Рисунок 7.5).
Цилиндрическая и коническая поверхности бесконечны (т.к. бесконечны образующие); сферическая, торовая поверхности — конечны.
Сферическая поверхность – частный случай торовой поверхности. При вращении окружности вокруг осей б, в, г (Рисунок 7.4, а) получим торовую поверхность (Рисунок 7.4, б), а вокруг оси а – сферическую.
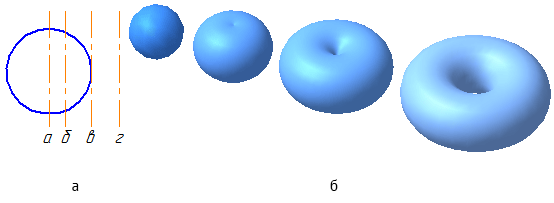
Рисунок 7.4 – Образование поверхностей вращения
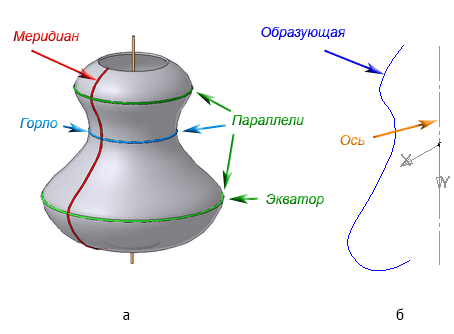
Рисунок 7.5 – Элементы поверхности вращения
Каждая точка образующей линии при вращении вокруг оси описывает окружность, которая располагается в плоскости, перпендикулярной оси вращения. Эти окружности называются параллелями (Рисунок 7.5).
Наименьшая параллель называется горлом , наибольшая – экватором .
Линия пересечения поверхности вращения плоскостью, проходящей через ось, называется меридианом .
Линия пересечения поверхности вращения плоскостью, проходящая через ось, параллельно фронтальной плоскости проекций, называется главным меридианом .
7.3. Цилиндрическая поверхность
Цилиндрическая поверхность образуется движением прямой линии, которая в любом своём положении параллельна данному направлению и пересекает криволинейную направляющую (Рисунок 7.6).
Цилиндр – геометрическое тело, ограниченное замкнутой цилиндрической поверхностью и двумя параллельными плоскостями, пересекающими все образующие данной поверхности.
Взаимно параллельные плоские фигуры, ограниченные цилиндрической поверхностью, называются основаниями цилиндра .
Если нормальное сечение (плоскость сечения перпендикулярна образующим) имеет форму окружности, то цилиндрическая поверхность называется круговой .
Если образующие цилиндрической поверхности перпендикулярны к основаниям, то цилиндр называется прямым, в противном случае – наклонным .
Рассмотрим проецирование прямого кругового цилиндра и принадлежащей ему точки F.
Условимся, что фронтальная проекция точки F – невидима (Рисунок 7.6).
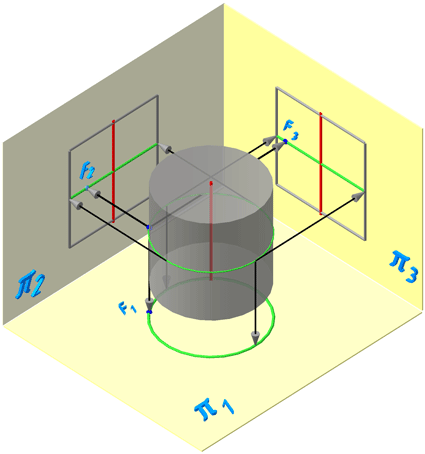
Рисунок 7.6 – Проецирование цилиндра на плоскости проекций
Горизонтальная и профильная проекции точки F будут видимы.
При определении видимости, образующие, которые находятся на части, обращённой к наблюдателю и обозначенной на π1 сплошной зелёной линией – на плоскости проекции π2 видны, а которые находятся на части, обозначенной толстой штриховой линией – видны на π3.
Пусть точка А на π2 видима (Рисунок 7.7). Тогда на π1 она будет видима, а на π3 невидима.
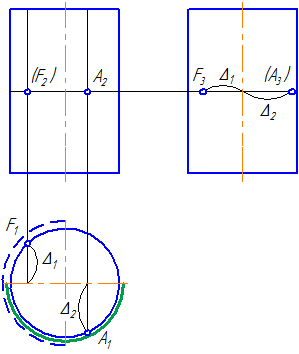
Рисунок 7.7 – Эпюр прямого кругового цилиндра и принадлежащих ему точек
7.4. Пересечение прямой с поверхностью прямого кругового цилиндра
Для построения точек пересечения прямой линии с поверхностью прямого кругового цилиндра не требуется дополнительных построений. На горизонтальной плоскости проекций точки пересечения (1 и 2) находятся сразу. Фронтальные проекции строим по линиям связи.
Но в общем случае, алгоритм решения рассмотрим на следующем упражнении.
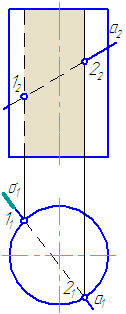
Рисунок 7.8 – Пересечение прямой с поверхностью прямого кругового цилиндра
Упражнение
Заданы: прямой круговой цилиндр с осью вращения, перпендикулярной плоскости проекций π1 и прямая а общего положения (Рисунок 7.8).
Построить точки пересечения прямой а с поверхностью цилиндра.
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
- Заключить прямую во вспомогательную секущую плоскость частного положения σ (горизонтально-проецирующую).
- Построить фигуру пересечения поверхности цилиндра горизонтально-проецирующей плоскостью: результат пересечения — четырехугольник (на π2 условно заштрихован).
- Найти точки «входа» и «выхода» прямой: на пересечении её фронтальной проекции с фронтальными проекциями сторон четырёхугольника (они же — проекции образующей цилиндра);
Прямая а пересекается со сторонами сечения в двух точках – 1 и 2.
Определим видимость участков прямой: очевидно, что между точками 1-2 прямая невидима, а на плоскости проекций π2 будет ещё невидим участок прямой от точки 1 до левой крайней образующей.
7.5. Пересечение прямой с поверхностью наклонного цилиндра
Упражнение
Заданы : наклонный круговой цилиндр с осью вращения, наклонной к плоскости проекций π1 и прямая mобщего положения (Рисунок 7.9).
Построить точки пересечения прямой mс поверхностью цилиндра.
Решение :
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
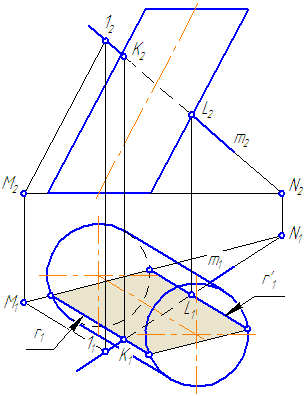
Рисунок 7.9 – Пересечение прямой с наклонным цилиндром
- Заключить прямую m во вспомогательную плоскость σ, дающую в сечении наиболее простую фигуру – четырехугольник (σ параллельна оси цилиндра или образующим). Эту плоскость зададим двумя пересекающимися прямыми m∩(1M);
- Построить горизонтальный след плоскости σ (прямую пересечения σ с плоскостью проекций π1) как проходящую через горизонтальные следы прямых m и (1M) (точки пересечения прямых с плоскостью проекций π1 (основания)) – (MN);
- Найти точки пересечения MN с окружностью основания цилиндра. Через эти точки провести образующие r, по которым плоскость σ пересекает боковую поверхность цилиндра:
На анимации ниже представлена последовательность построения точек пересечения прямой с наклонным цилиндром.
7.6. Сферическая поверхность
Сферическая поверхность – поверхность, образованная вращением окружности вокруг отрезка, являющегося её диаметром.
Шаром называется тело, ограниченное сферической поверхностью.
Экватор – это окружность, которая получается пересечением сферы горизонтальной плоскостью, проходящей через ее центр (Рисунок 7.10).
Меридиан – это окружность, которая получается пересечением сферы плоскостью, перпендикулярной плоскости экватора и проходящей через центр сферы.
Параллелями называются окружности, которые получаются пересечением сферы плоскостями, параллельными плоскости экватора.
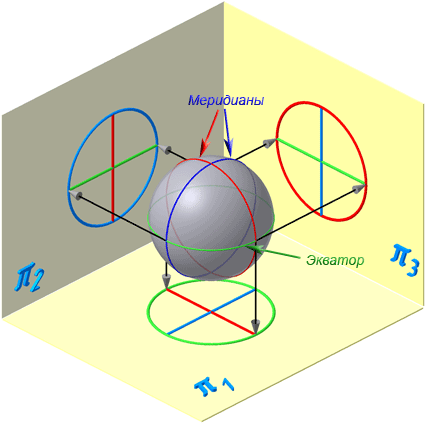
Рисунок 7.10 – Проецирование сферической поверхности
Прямоугольная проекция шара (сферы) на любую плоскость – есть окружность, которую часто называют очерковой .
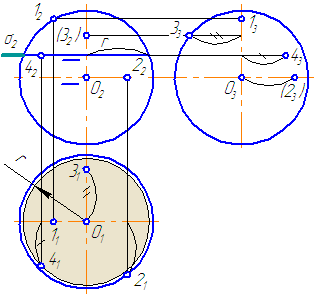
Рисунок 7.11 – Эпюр сферы и принадлежащих ей точек
Упражнение
Заданы: сферическая поверхность тремя проекциями (Рисунок 7.11) и фронтальные проекции точек 1, 2, 3, 4.
Необходимо построить горизонтальные и профильные проекции заданных точек.
- Проанализируем их расположение на поверхности сферы. Точки 1, 2, 3 лежат на очерковых образующих сферы.
- Точка 1 принадлежит главному меридиану (очерковой окружности на π2), проекция которого на π1 совпадает с проекцией горизонтальной оси, на π3 – с проекцией вертикальной оси.
- Недостающие проекции точки 1 находим посредством линий проекционной связи. Все проекции точки 1 видимы.
- Рассмотрим положение точки 2. Точка 2 принадлежит экватору (очерковой окружности на π1), проекции которого на π2 и π3 совпадают с проекцией горизонтальной оси. Горизонтальная проекция точки 2 строится посредством линии проекционной связи, для построения профильной проекции необходимо измерить расстояние, отмеченное дугой, и отложить его по линии связи от точки О3 вправо. Профильная проекция точки 2 невидима.
- Точка 3 принадлежит очерковой окружности на π3, которая также является меридианом, проекции которого на π2 и π1 совпадают с проекцией вертикальной оси. Профильная проекция точки строится посредством линии проекционной связи. Для построения горизонтальной проекции точки 3 необходимо расстояние, отмеченное на π3 двумя засечками, отложить на π1 вверх от точки О1. Горизонтальная и профильная проекции точки 3 видимы.
- Для построения проекций точки 4 необходимо ввести вспомогательную секущую плоскость (зададим плоскость σ//π1 и σ⊥π2). Плоскость σ пересекает поверхность сферы по окружности радиусом r. На π1 строим данное сечение и по линии проекционной связи находим 41. Для построения профильной проекции необходимо расстояние, отмеченное засечкой, отложить по линии проекционной связи на π3 вправо от оси. Все проекции точки 4 видимы.
7.7. Пересечение прямой с поверхностью сферы
Упражнение
Заданы: сфера и прямая общего положения АВ.
Найти: точки пересечения прямой с поверхностью сферы (точки «входа» и «выхода»).
Чтобы найти точки пересечения прямой с поверхностью сферы необходимо:
- Заключить прямую во вспомогательную плоскость, пересекающую поверхность сферы так, чтобы получались простые фигуры (например, круг, ограниченный окружностью);
- Построить фигуру пересечения сферы вспомогательной плоскостью;
- Найти общие точки прямой и контура фигуры (окружность): так как прямая и окружность лежат в одной плоскости, то они, пересекаясь, образуют точки, общие для прямой и сферы, которые и будут являться искомыми точками (Рисунок 7.12).
- Через прямую проводим плоскость σ. Пусть σ⊥π1 и пересекает сферу по окружности радиусом r. С – центр окружности сечения ОС⊥σ:
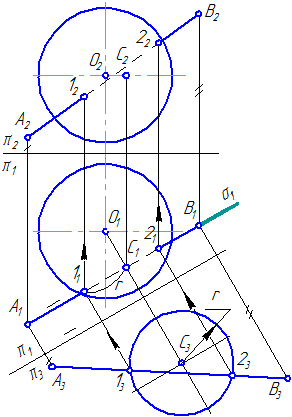
Рисунок 7.12 – Пересечение прямой с поверхностью сферы
- Введём π3⊥π1 и π3//σ1. Построим проекцию окружности сечения на π3 и проекцию А3В3.
- Находим точки их пересечения 12 и 23.
- Определим видимость участков прямой.
- На π1 точки 1 и 2 находятся на переднем полушарии, следовательно, на π2 они видимы.
7.8. Коническая поверхность
Коническая поверхность образуется движением прямой линии (образующей), которая в любом своем положении проходит через неподвижную точку и пересекает криволинейную направляющую (имеет две полости).
Тело, ограниченное замкнутой конической поверхностью вершиной и плоскостью, называется конусом .
Плоская фигура, ограниченная конической поверхностью, называется основанием конуса .
Часть конической поверхности, ограниченная вершиной и основанием, называется боковой поверхностью конуса .
Если основание конуса является кругом, то конус называется круговым .
Если вершина конуса расположена на перпендикуляре к основанию, восстановленному из его центра, то конус называется прямым круговым .
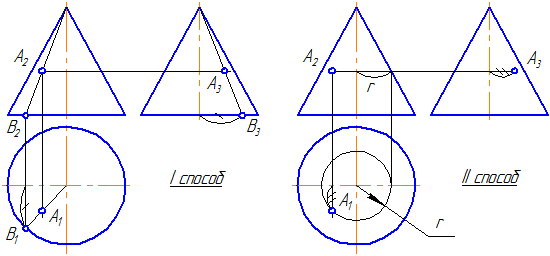
Рисунок 7.13 – Принадлежность точки конической поверхности
Рассмотрим вопрос принадлежности точки А поверхности конуса.
Дана фронтальная проекция точки А и она видима (Рисунок 7.13).
1 способ . Для построения ортогональных проекций точки, расположенной на поверхности конуса, построим проекции образующей, проходящей через данную точку. При таком положении точки А все её проекции – видимы.
2 способ . Точка А лежит на параллели конуса радиусом r. На π1 строим проекцию окружности (параллели) и по линии проекционной связи находим А1. По двум проекциям точки строим третью.
7.9. Пересечение прямой с поверхностью конуса
Пусть задан прямой круговой конус и прямая общего положения m (Рисунок 7.14). Найти точки «входа» и «выхода» прямой с поверхностью конуса.
- Через прямую m проводим вспомогательную секущую плоскость σ, дающую в сечении наиболее простую фигуру.
- Применение в качестве вспомогательной секущей плоскости проецирующей плоскости в данном случае нецелесообразно, так как в сечении получится кривая второго порядка, которую нужно строить по точкам.
Наиболее простая фигура – треугольник. Для этого секущая плоскость σ должна пройти через вершину S. Плоскость зададим с помощью двух пересекающихся прямых σ=SM∩MN или, что, то же самое, (σ=SM∩m).
- Возьмем на прямой m точку А и соединим её с вершиной. Прямая SA пересечёт плоскость основания в точке М.
- Построим горизонтальные проекции этих объектов.
- Продлим фронтальную проекцию прямой m до пересечения с плоскостью основания в точке N.
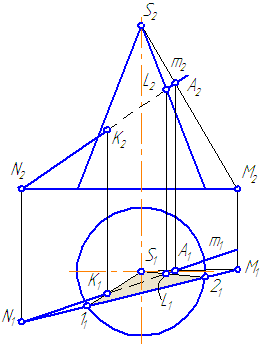
Рисунок 7.14 – Построение точек пересечения прямой с поверхностью конуса
- Построим её горизонтальную проекцию.
- Соединим точки M1N1, на пересечении с окружностью основания получим точки 1 и 2.
- Строим треугольник сечения конуса плоскостью σ, соединив точки 1 и 2 с вершиной S.
- На пересечении образующих 1-S и 2-S с прямой m получим искомые точки K и L.
- Определим видимость прямой относительно поверхности конуса.
На анимации ниже представлена последовательность построения точек пересечения прямой с поверхностью конуса.
7.10. Пересечение цилиндра плоскостью
Пусть плоскость сечения γ – фронтально-проецирующая (Рисунок 7.15).
- Если плоскость сечения γ параллельна оси цилиндра, то она пересекает цилиндр по четырехугольнику.
- Если плоскость сечения γ перпендикулярна оси цилиндра, то она пересекает цилиндр по окружности.
- Если плоскость сечения γ не параллельна и не перпендикулярна оси цилиндра в сечении эллипс.
Рассмотрим алгоритм построения сечения – эллипс (Рисунок 7.15):
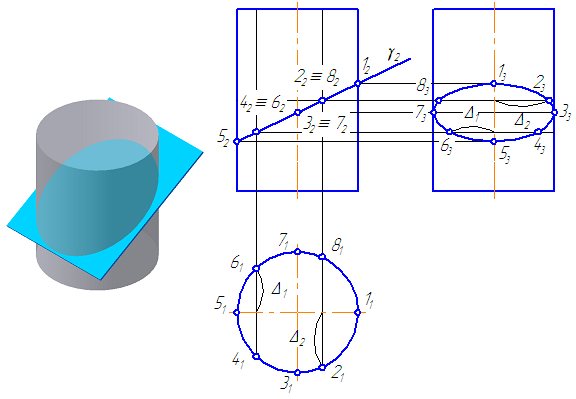
Рисунок 7.15 – пересечение цилиндра плоскостью
- Находим и строим характерные точки (точки, не требующие дополнительных построений) – в нашем случае, точки принадлежащие крайним образующим – 1, 3, 5, 7. Одновременно с этим, данные точки определяют величину большой и малой оси эллипса.
- Для построения участка эллипса необходимо построить не менее 5-ти точек (так как лекальная кривая второго порядка определяется как минимум пятью точками). Для построения точек 2, 4, 6, 8 возьмем на π1 произвольно расположенные образующие цилиндра, которые проецируются на данную плоскость проекции в точки.
- Построим вторые проекции данных образующих. Из точек пересечения вторых проекций образующих с проекцией плоскости сечения γ проводим линии связи к π3. Для построения третьей проекции, например, точки 6 измеряем расстояние Δ1 и откладываем его по соответствующей линии связи на π3. Симметрично ей, относительно оси вращения, строим точку 4. Аналогично строятся другие точки.
7.11. Пересечение сферы плоскостью
Плоскость пересекает поверхность сферы всегда по окружности. Задачу пересечения плоскости со сферой мы рассматривали при решении задачи построения точек пересечения прямой с поверхностью сферы (см. выше).
7.12. Пересечение конуса плоскостью
Рассмотрим пять возможных вариантов расположения плоскости относительно поверхности прямого кругового конуса. Пусть плоскость сечения перпендикулярна плоскости проекций π2 (Рисунок 7.16).
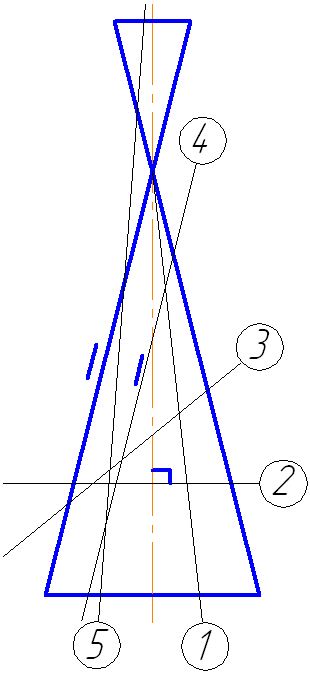
- Если плоскость проходит через вершину (1) – в сечении две образующие и прямая пересечения с плоскостью основания.
- Если плоскость перпендикулярна оси вращения конуса (2) – в сечении окружность.
- Если плоскость не параллельна ни одной образующей (пересекает все образующие (3)) – в сечении эллипс.
- Если плоскость параллельна одной образующей конуса – в сечении парабола (на примере – плоскость сечения (4) параллельна крайней образующей конуса).
- Если плоскость параллельна двум образующим (пересекает обе полости конической поверхности (5)) – в сечении гипербола (рисунок 7.17).
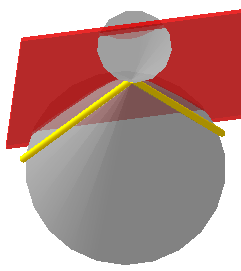
Рисунок 7.17. Плоскость сечения параллельна двум образующим конуса
Ниже, на моделях, представлены варианты положения секущей плоскости относительно поверхности конуса, при которых получаются сечения в виде эллипса, параболы и гиперболы.
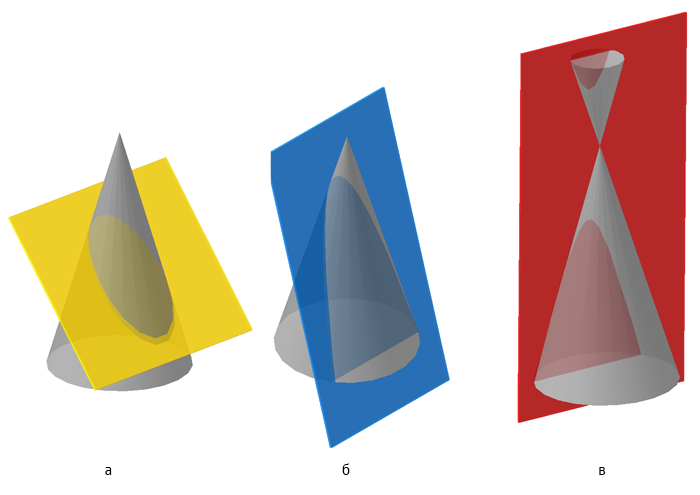
Рисунок 7.18 – Сечение конической поверхности плоскостью (а — эллипс, б — парабола, в — гипербола)
Рассмотрим пример построения сечения конической поверхности плоскостью.
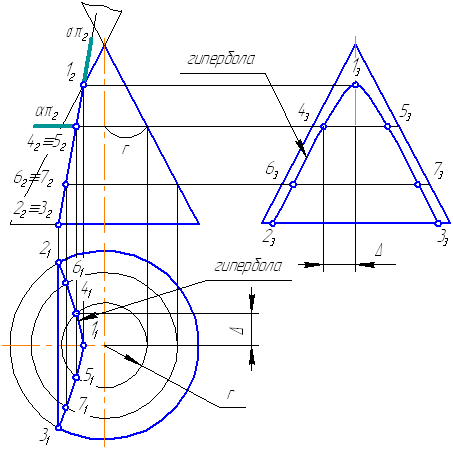
Рисунок 7.19 – Построение пересечения конической поверхности плоскостью
Пусть задана секущая проецирующая плоскость σ⊥π2 (Рисунок 7.19). Если продлить коническую поверхность и проекцию плоскости, то видно, что плоскость пересекает вторую ветвь конической поверхности, следовательно, в сечении получится гипербола.
- Построим характерные точки. Это точки, лежащие на крайних образующих и на окружности основания конуса (1, 2, 3). Их проекции строятся по линиям проекционной связи.
- Для построения промежуточных точек, воспользуемся методом вспомогательных секущих плоскостей. Введём плоскость α⊥π2 и перпендикулярно оси вращения, что даст в сечении окружность радиусом r. Строим эту окружность на π1. Плоскость α пересекает и заданную плоскость сечения по прямой, проекции которой на π1 и π3 совпадают с линиями проекционной связи.
- На пересечении этих двух сечений на плоскости проекций π1 строим точки 4, 5. Профильные проекции этих точек строим по линии проекционной связи, откладывая расстояние от оси вращения конуса, равное Δ.
- Аналогично строим точки 6, 7. Плавно соединим построенные точки, образуя гиперболу.
- Обведём то, что осталось от конуса после такого среза с определением видимости. В нашем примере все проекции построенной кривой будут видимы.
На анимации ниже представлена последовательность построения пересечения конической поверхности плоскостью.
7.13. Задачи для самостоятельной работы
1. Достроить проекции сферы с заданным вырезом (Рисунок 7.20).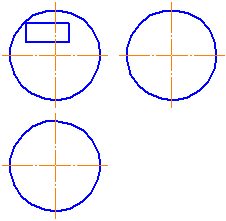
Рисунок 7.20
2-3. Построить три проекции конуса с призматическим отверстием (Рисунки 7.21, 7.22).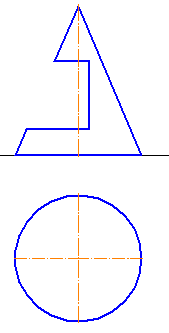
Рисунок 7.21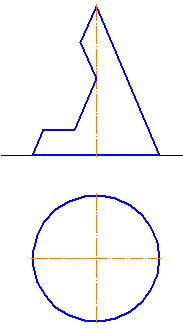
Рисунок 7.22
4. Построить точки «входа» и «выхода» прямой при пересечении её с поверхностью полусферы (Рисунок 7.23).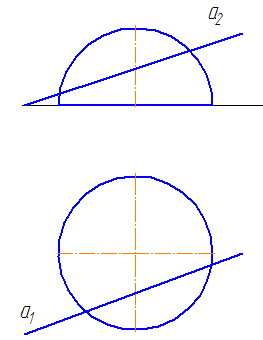
Рисунок 7.23
http://forkettle.ru/vidioteka/tekhnicheskie-nauki/cherchenie/780-osnovy-nachertatelnoj-geometrii/8638-poverkhnosti
http://cadinstructor.org/ng/lectures/7-poverhnosty/