Уравнения равновесия жидкостей
Раздел гидравлики, посвященный изучению покоя и равновесия жидкостей и газов, называют гидростатикой. В случае покоя жидкости силы внутреннего трения отсутствуют и5 следовательно, будучи в равновесии, масса реальной жидкости находится в условиях, близких к идеальной жидкости.
Гидростатическое давление. Внутри жидкости, находящейся в равновесии, можно представить себе элементарную площадку AF. На эту площадку по нормали к ней внутрь жидкости будет действовать сила АР давления столба жидкости. Если бы эта сила была направлена под углом к элементарной площадке жидкости, на которую она действует, то ее можно было бы разложить на две составляющих: направленную нормально и направленную касательно к площадке. Последняя вызвала бы перемещение элемента жидкости и вывела бы жидкость из состояния равновесия.
Силу АР, отнесенную к единице площади, т. е. называют средним гидростатическим давлением.
Предел этого отношения lim =Р будет характеризовать
Напряжение гидростатического давления в данной точке. Последнюю величину в дальнейшем будем называть просто гидростатическим давлением и обозначать буквой р. Д Р
Из отношения следует, что гидростатическое давление измеряется
В единицах силы, отнесенных к единице площади, т. е. в кгс/м2.
Величина гидростатического давления в ка — к о й-н ибудь произвольно взятой точке жидкости не зависит от выбранного направления. Иными словами, как бы мы ни проводили плоскость через данную точку жидкости,
Величина давления на плоскость будет одна и та же. Это положение доказывается при выводе уравнений равновесия жидкости.
Однако гидростатическое давление в. разных точках жидкости будет различным в зависимости от положения этих точек в жидкости.
Давление в точках жидкости, расположенных ближе к поверхности. будет иным, чем в точках, удаленных от этой поверхности. Математически это выражается так: p—f(x, у, г), т. е. гидростатическое давление является в общем виде функцией пространственных координат точки.
Дифференциальные уравнения равновесия Эйлера. Выделим в жидкости, находящейся в равновесии, элементарный параллелепипед объемом dV с ребрами dx, dy, dz (рис. 1).
Согласно основному принципу статики сумма проекций на оси координат всех сил, действующих на выделенный и находящийся в равновесии параллелепипед, должна быть равна нулю.
В жидкости, находящейся в покое, действуют объемные силы (силы тяжести) и силы гидростатического давления.
Рассмотрим проекции этих сил на ось г. Действие силы тяжести на элементарный объем жидкости пропорционально массе жидкости dm, заключенной в этом объеме, и ускорению силы тяжести g. Сила тяжести направлена вниз и параллельно оси г. Поэтому она будет проектироваться на эту ось со знаком минус:
Где p—плотность жидкости.
Сила гидростатического давления, равная pdxdy, проектируемая на ось z, действует по нормали к грани dx, dy. На противоположную грань действует сила, равная
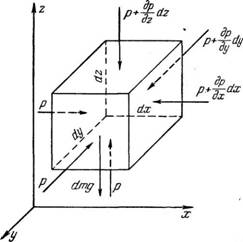
Рис. 1. К выводу дифференциального уравнения равновесия Эйлера.
Где dz—изменение гидростатического давления в направлении оси г по всей длине ребра dz.
Проекция равнодействующей силы давления на ось г, очевидно, будет равна
И, следовательно, сумма проекций всех действующих сил на ось z равна
-9gdV-^-dV = 0 После сокращения на dV получим
Суммы проекций сил на оси хну будут содержать лишь члены, учитывающие изменение гидростатического давления в направлении соответствующих осей, так как проекции сил тяжести в данном случае равны нулю.
Соответственно получим: для оси х
И по предыдущему для оси г
Эти уравнения носят название д ифференциальныхурав- нений равновесияЭйлера. Они определяют условия равновесия элементарного объема жидкости и вместе с тем показывают правильность приведенного выше важного положения гидростатики о том, что гидростатическое давление в произвольно взятой точке жидкости не зависит от выбранного направления.
Указанные уравнения выведены при условии, что элементарный объем жидкости находится под действием силы тяжести, направленной параллельно оси z.
Если сила тяжести направлена под некоторым углом к осям координат, она будет проектироваться также и на оси х и у и в уравнения (1—5) и (1—5а) войдут величины проекции этой силы.
Для того чтобы получить в конечной форме выражение законов распределения гидростатического давления р во всем объеме покоящейся жидкости, необходимо проинтегрировать систему уравнений (1—5), (1—5а), (1—56). Интегрирование приводит к основному уравнению гидростатики, широко используемому в технике.
Основное уравнение гидростатики. В системе дифференциальных „ „ dp dp др уравнении равновесия Эйлера частные производные щ, определяют изменение гидростатического давления в точках, расположенных по направлениям соответствующих осей координат.
Для того чтобы найти изменение гидростатического давления не в точках, а по длине ребер dx, dy и dz элементарного параллелепипеда (см. рис. 1), необходимо, как и при выводе уравнений Эйлера, умножить
Частные производные на соответствующие длины ребер—
Совокупность одновременного изменения гидростатического давления в трех направлениях определяет изменение давления во всем объеме жидкости, заключенной в параллелепипеде с ребрами dx, dy, dz, и представляет собой полный дифференциал гидростатического давления:
С учетом действия объемной силы (силы тяжести) получим общее выражение закона распределения гидростатического давления в объеме жидкости, заключенной в параллелепипеде с ребрами dx, dy, dz и находящейся в равновесии под действием объемной силы:
Таким образом, система уравнений Эйлера может быть заменена одним уравнением (1—6).
Для того чтобы определить изменение гидростатического давления во всем объеме покоящейся жидкости, достаточно проинтегрировать это уравнение. С этой целью перепишем его в таком виде:
Но так как то получаем
Удельный вес несжимаемой однородной жидкости является величиной постоянной, поэтому сумма дифференциалов в уравнении (1—7) может быть заменена дифференциалом суммы
Z + у = const = С (1—8)
Константа интегрирования С определяется по известным значениям z и р в какой-либо точке жидкости. Обозначим эти величины через г0 и р0, тогда
И уравнение (1—8) примет вид:
Уравнение (1—9) является основным уравнением гидростатики. В нем z и z0—высота погружения двух точек жидкости, р и р0—гидростатическое давление в этих точках.
Уравнение (1—9) можно представить в следующем виде:
Из уравнения (1—10) следует, что частное от деления гидростатического давления на удельный вес жидкости имеет размерность длины, так как
Равновесие, закон Паскаля, сила Архимеда, математический и пружинный маятники, механические волны, звук
Теория к заданию 4 из ЕГЭ по физике
Равновесие механической системы (абсолютно твердого тела)
Равновесие механической системы — это состояние, при котором все точки механической системы находятся в покое по отношению к рассматриваемой системе отсчета. Если система отсчета инерциальна, равновесие называется абсолютным, если неинерциальна — относительным.
Для нахождения условий равновесия абсолютно твердого тела необходимо мысленно разбить его на большое число достаточно малых элементов, каждый из которых можно представить материальной точкой. Все эти элементы взаимодействуют между собой — эти силы взаимодействия называются внутренними. Помимо этого на ряд точек тела могут действовать внешние силы.
Согласно второму закону Ньютона, чтобы ускорение точки равнялось нулю (а ускорение покоящейся точки равно нулю), геометрическая сумма сил, действующих на эту точку, должна быть равна нулю. Если тело находится в покое, значит, все его точки (элементы) также находятся в покое. Следовательно, для любой точки тела можно записать:
где $
Уравнение означает, что для равновесия тела необходимо и достаточно, чтобы геометрическая сумма всех сил, действующих на любой элемент этого тела, была равна нулю.
Из уравнения легко получить первое условие равновесия тела (системы тел). Для этого достаточно просуммировать уравнение по всем элементам тела:
Вторая сумма равна нулю согласно третьему закону Ньютона: векторная сумма всех внутренних сил системы равна нулю, т. к. любой внутренней силе соответствует сила, равная по модулю и противоположная по направлению.
Первым условием равновесия твердого тела (системы тел) является равенство нулю геометрической суммы всех внешних сил, приложенных к телу.
Это условие является необходимым, но не достаточным. В этом легко убедиться, вспомнив о вращающем действии пары сил, геометрическая сумма которых тоже равна нулю.
Вторым условием равновесия твердого тела является равенство нулю суммы моментов всех внешних сил, действующих на тело, относительно любой оси.
Таким образом, условия равновесия твердого тела в случае произвольного числа внешних сил выглядят так:
Закон Паскаля
Гидростатика (от греч. hydor — вода и statos — стоящий) — один из подразделов механики, изучающий равновесие жидкости, а также равновесие твердых тел, частично или полностью погруженных в жидкость.
Закон Паскаля — основной закон гидростатики, согласно которому давление на поверхность жидкости, произведенное внешними силами, передается жидкостью одинаково во всех направлениях.
Этот закон был открыт французским ученым Б. Паскалем в 1653 г. и опубликован в 1663 г.
Чтобы убедиться в справедливости закона Паскаля, достаточно проделать простой опыт. Присоединим к трубке с поршнем полый шар со множеством маленьких отверстий. Наполнив шар водой, нажмем на поршень, чтобы увеличить в нем давление. Вода начнет выливаться, но не только через то отверстие, которое находится на линии действия прилагаемой нами силы, а и через все остальные тоже. Причем напор воды, обусловленный внешним давлением, во всех появившихся струйках будет одинаковым.
Аналогичный результат мы получим в том случае, если вместо воды будем использовать дым. Таким образом, закон Паскаля справедлив не только для жидкостей, но и для газов.
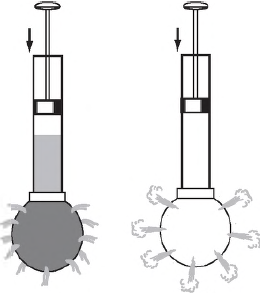
Жидкости и газы передают оказываемое на них давление по всем направлениям одинаково.
Передача давления жидкостями и газами во всех направлениях одновременно объясняется достаточно высокой подвижностью частиц, из которых они состоят.
Давление покоящейся жидкости на дно и стенки сосуда (гидростатическое давление)
Жидкости (и газы) передают по всем направлениям не только внешнее давление, но и то давление, которое существует внутри них благодаря весу собственных частей.
Давление, оказываемое покоящейся жидкостью, называется гидростатическим.
Получим формулу для расчета гидростатического давления жидкости на произвольной глубине $h$ (в окрестности точки А на рисунке).
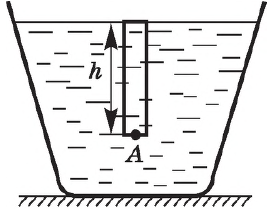
Сила давления, действующая со стороны вышележащего узкого столба жидкости, может быть выражена двумя способами:
1) как произведение давления $р$ в основании этого столба на площадь его сечения $S$:
2) как вес того же столба жидкости, т. е. произведение массы $m$ жидкости на ускорение свободного падения:
Масса жидкости может быть выражена через ее плотность $р$ и объем $V$:
а объем — через высоту столба и площадь его поперечного сечения:
Подставляя в формулу $F=mg$ значение массы из $m=pV$ и объема из $V=Sh$, получим:
Приравнивая выражения $F=pS$ и $F=pVg=pShg$ для силы давления, получим:
Разделив обе части последнего равенства на площадь $S$, найдем давление жидкости на глубине $h$:
Это и есть формула гидростатического давления.
Гидростатическое давление на любой глубине внутри жидкости не зависит от формы сосуда, в котором находится жидкость, и равно произведению плотности жидкости, ускорения свободного падения и глубины, на которой определяется давление.
Важно еще раз подчеркнуть, что по формуле гидростатического давления можно рассчитывать давление жидкости, налитой в сосуд любой формы, в том числе давление на стенки сосуда, а также давление в любой точке жидкости, направленное снизу вверх, поскольку давление на одной и той же глубине одинаково по всем направлениям.
С учетом атмосферного давления $р_0$, формула для давления покоящейся в ИСО жидкости на глубине $h$ запишется следующим образом:
Гидростатический парадокс
Гидростатический парадокс — явление, заключающееся в том, что вес жидкости, налитой в сосуд, может отличаться от силы давления жидкости на дно сосуда.
В данном случае под словом «парадокс» понимают неожиданное явление, не соответствующее обычным представлениям.
Так, в расширяющихся кверху сосудах сила давления на дно меньше веса жидкости, а в сужающихся — больше. В цилиндрическом сосуде обе силы одинаковы. Если одна и та же жидкость налита до одной и той же высоты в сосуды разной формы, но с одинаковой площадью дна, то, несмотря на разный вес налитой жидкости, сила давления на дно одинакова для всех сосудов и равна весу жидкости в цилиндрическом сосуде.
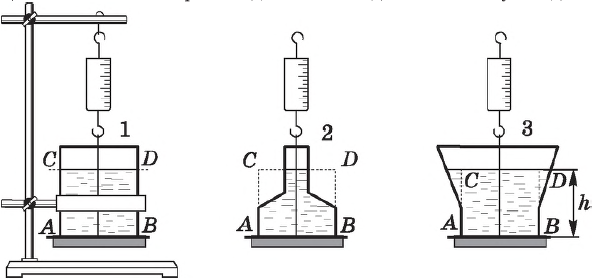
Это следует из того, что давление покоящейся жидкости зависит только от глубины под свободной поверхностью и от плотности жидкости: $p=pgh$ (формула гидростатического давления). А так как площадь дна у всех сосудов одинакова, то и сила, с которой жидкость давит на дно этих сосудов, одна и та же. Она равна весу вертикального столба $АВСD$ жидкости: $P=pghS$, здесь $S$ — площадь дна (хотя масса, а следовательно, и вес в этих сосудах различны).
Гидростатический парадокс объясняется законом Паскаля — способностью жидкости передавать давление одинаково во всех направлениях.
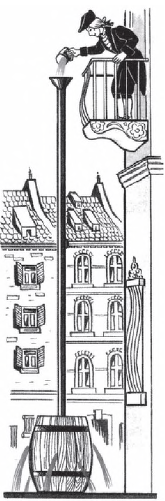
Из формулы гидростатического давления следует, что одно и то же количество воды, находясь в разных сосудах, может оказывать разное давление на дно. Поскольку это давление зависит от высоты столба жидкости, то в узких сосудах оно будет больше, чем в широких. Благодаря этому даже небольшим количеством воды можно создавать очень большое давление. В 1648 г. это очень убедительно продемонстрировал Б. Паскаль. Он вставил в закрытую бочку, наполненную водой, узкую трубку и, поднявшись на балкон второго этажа, вылил в эту трубку кружку воды. Из-за малой толщины трубки вода в ней поднялась до большой высоты, и давление в бочке увеличилось настолько, что крепления бочки не выдержали, и она треснула.
Закон Архимеда
Закон Архимеда — закон статики жидкостей и газов, согласно которому на всякое тело, погруженное в жидкость (или газ), действует со стороны этой жидкости (или газа) выталкивающая сила, равная весу вытесненной телом жидкости (газа) и направленная по вертикали вверх.
Этот закон был открыт древнегреческим ученым Архимедом в III в. до н. э. Свои исследования Архимед описал в трактате «О плавающих телах», который считается одним из последних его научных трудов.
Ниже приведены выводы, следующие из закона Архимеда.
Действие жидкости и газа на погруженное в них тело
Если погрузить в воду мячик, наполненный воздухом, и отпустить его, то он всплывет. То же самое произойдет со щепкой, с пробкой и многими другими телами. Какая же сила заставляет их всплывать?
На тело, погруженное в воду, со всех сторон действуют силы давления воды. В каждой точке тела эти силы направлены перпендикулярно его поверхности. Если бы все эти силы были одинаковы, тело испытывало бы лишь всестороннее сжатие. Но на разных глубинах гидростатическое давление различно: оно возрастает с увеличением глубины. Поэтому силы давления, приложенные к нижним участкам тела, оказываются больше сил давления, действующих на тело сверху.
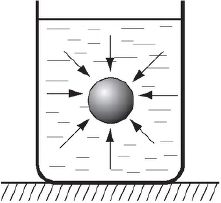
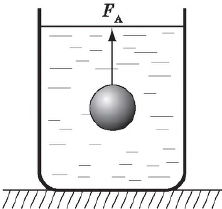
Если заменить все силы давления, приложенные к погруженному в воду телу, одной (результирующей или равнодействующей) силой, оказывающей на тело то же самое действие, что и все эти отдельные силы вместе, то результирующая сила будет направлена вверх. Это и заставляет тело всплывать. Эта сила называется выталкивающей силой, или архимедовой силой (по имени Архимеда, который впервые указал на ее существование и установил, от чего она зависит). На рисунке она обозначена как $F_A$.
Архимедова (выталкивающая) сила действует на тело не только в воде, но и в любой другой жидкости, т. к. в любой жидкости существует гидростатическое давление, разное на разных глубинах. Эта сила действует и в газах, благодаря чему летают воздушные шары и дирижабли.
Благодаря выталкивающей силе вес любого тела, находящегося в воде (или в любой другой жидкости), оказывается меньше, чем в воздухе, а в воздухе меньше, чем в безвоздушном пространстве. В этом легко убедиться, взвесив гирю с помощью учебного пружинного динамометра сначала в воздухе, а затем опустив ее в сосуд с водой.
Уменьшение веса происходит и при переносе тела из вакуума в воздух (или какой-либо другой газ).
Если вес тела в вакууме (например, в сосуде, из которого откачан воздух) равен $Р_0$, то его вес в воздухе равен:
где $F’_A$ — архимедова сила, действующая на данное тело в воздухе. Для большинства тел эта сила ничтожно мала и ею можно пренебречь, т. е. можно считать, что $P_<возд>=P_0=mg$.
Вес тела в жидкости уменьшается значительно сильнее, чем в воздухе. Если вес тела в воздухе $P_<возд>=P_0$, то вес тела в жидкости равен $Р_<жидк>= Р_0 — F_A$. Здесь $F_A$ — архимедова сила, действующая в жидкости. Отсюда следует, что
Поэтому чтобы найти архимедову силу, действующую на тело в какой-либо жидкости, нужно это тело взвесить в воздухе и в жидкости. Разность полученных значений и будет архимедовой (выталкивающей) силой.
Другими словами, учитывая формулу $F_A=P_0-P_<жидк>$, можно сказать:
Выталкивающая сила, действующая на погруженное в жидкость тело, равна весу жидкости, вытесненной этим телом.
Определить архимедову силу можно также теоретически. Для этого предположим, что тело, погруженное в жидкость, состоит из той же жидкости, в которую оно погружено. Мы имеем право это предположить, так как силы давления, действующие на тело, погруженное в жидкость, не зависят от вещества, из которого оно сделано. Тогда приложенная к такому телу архимедова сила $F_A$ будет уравновешена действующей вниз силой тяжести $m_<ж>g$ (где $m_<ж>$ — масса жидкости в объеме данного тела):
Но сила тяжести $m_<ж>g$ равна весу вытесненной жидкости $Р_ж$, Таким образом,
Учитывая, что масса жидкости равна произведению ее плотности $р_ж$ на объем, формулу $F_=m_<ж>g$ можно записать в виде:
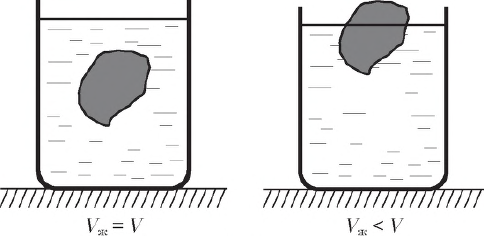
где $V_ж$ — объем вытесненной жидкости. Этот объем равен объему той части тела, которая погружена в жидкость. Если тело погружено в жидкость целиком, то он совпадает с объемом $V$ всего тела; если же тело погружено в жидкость частично, то объем $V_ж$ вытесненной жидкости меньше объема $V$ тела.
С учетом вышеизложенного закон Архимеда можно сформулировать так:
На всякое тело, погруженное в покоящуюся жидкость (или газ), действует со стороны этой жидкости (или газа) выталкивающая сила, равная произведению плотности жидкости (или газа), ускорения свободного падения и объема той части тела, которая погружена в жидкость (или газ).
Свободные колебания математического и пружинного маятников
Свободные колебания (или собственные колебания) — это колебания колебательной системы, совершаемые только благодаря первоначально сообщенной энергии (потенциальной или кинетической) при отсутствии внешних воздействий.
Потенциальная или кинетическая энергия может быть сообщена, например, в механических системах через начальное смещение или начальную скорость.
Свободно колеблющиеся тела всегда взаимодействуют с другими телами и вместе с ними образуют систему тел, которая называется колебательной системой.
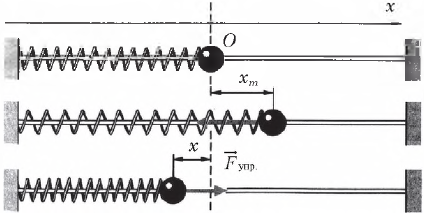
Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец пружины, входят в колебательную систему. Здесь шарик свободно скользит по струне (силы трения пренебрежимо малы). Если отвести шарик вправо и предоставить его самому себе, он будет совершать свободные колебания около положения равновесия (точки О) вследствие действия силы упругости пружины, направленной к положению равновесия.
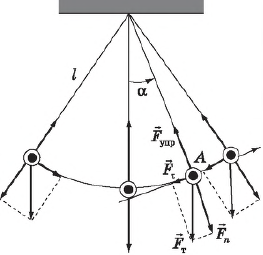
Другим классическим примером механической колебательной системы является математический маятник. В данном случае шарик совершает свободные колебания под действием двух сил: силы тяжести и силы упругости нити (в колебательную систему входит также Земля). Их равнодействующая направлена к положению равновесия. Силы, действующие между телами колебательной системы, называются внутренними силами. Внешними силами называются силы, действующие на систему со стороны тел, не входящих в нее. С этой точки зрения свободные колебания можно определить как колебания в системе под действием внутренних сил после того, как система выведена из положения равновесия.
Условиями возникновения свободных колебаний являются:
- возникновение в них силы, возвращающей систему в положение устойчивого равновесия, после того как ее вывели из этого состояния;
- отсутствие трения в системе.
Динамика свободных колебаний
Колебания тела под действием сил упругости. Уравнение колебательного движения тела под действием силы упругости $F_<упр>$ может быть получено с учетом второго закона Ньютона ($F=ma$) и закона Гука ($F_<упр>=-kx$), где $m$ — масса шарика, $а$ — ускорение, приобретаемое шариком под действием силы упругости, $k$ — коэффициент жесткости пружины, $х$ — смещение тела от положения равновесия (оба уравнения записаны в проекции на горизонтальную ось $Ох$). Приравнивая правые части этих уравнений и учитывая, что ускорение $а$ — это вторая производная от координаты $х$ (смещения), получим:
Это дифференциальное уравнение движения тела, колеблющегося под действием силы упругости: вторая производная координаты по времени <ускорение тела) прямо пропорциональна его координате, взятой с противоположным знаком.
Колебания математического маятника. Для получения уравнения колебания математического маятника необходимо разложить силу тяжести $F_т=mg$ на нормальную $F_n$ (направленную вдоль нити) и тангенциальную $F_τ$ (касательную к траектории движения шарика — окружности) составляющие. Нормальная составляющая силы тяжести $F_n$ и сила упругости нити $F_<упр>$ в сумме сообщают маятнику центростремительное ускорение, не влияющее на величину скорости, а лишь меняющее ее направление, а тангенциальная составляющая $F_τ$ является той силой, которая возвращает шарик в положение равновесия и заставляет его совершать колебательные движения. Используя, как и в предыдущем случае, закон Ньютона для тангенциального ускорения — $ma_τ=F_τ$ и учитывая, что $F_τ=-mgsinα$, получим:
Знак минус появился потому, что сила и угол отклонения от положения равновесия $α$ имеют противоположные знаки. Для малых углов отклонения $sinα≈α$. В свою очередь, $α=/
Вид уравнения $s»=
Таким образом, свободные колебания описываются уравнениями одного вида (подчиняются одним и тем же законам) независимо от физической природы сил, вызывающих эти колебания.
Решением уравнений $x»=-
То есть координата тела, совершающего свободные колебания, меняется с течением времени по закону косинуса или синуса, и, следовательно, эти колебания являются гармоническими.
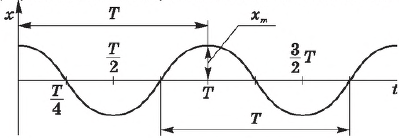
В уравнении $x=x_
Циклическая частота и период свободных гармонических колебаний определяются свойствами системы. Так, для колебаний тела, прикрепленного к пружине, справедливы соотношения:
Собственная частота тем больше, чем больше жесткость пружины или меньше масса груза, что вполне подтверждается опытом.
Для математического маятника выполняются равенства:
Эта формула была впервые получена и проверена на опыте голландским ученым Гюйгенсом (современником Ньютона).
Период колебаний возрастает с увеличением длины маятника и не зависит от его массы.
Следует особо обратить внимание на то, что гармонические колебания являются строго периодическими (т. к. подчиняются закону синуса или косинуса) и даже для математического маятника, являющегося идеализацией реального (физического) маятника, возможны только при малых углах колебания. Если углы отклонения велики, смещение груза не будет пропорционально углу отклонения (синусу угла) и ускорение не будет пропорционально смещению.
Скорость и ускорение тела, совершающего свободные колебания, также будут совершать гармонические колебания. Беря производную по времени функции $x=x_
где $υ_
Аналогично выражение для ускорения а получим, дифференцируя $x’=υ=-x_
где $a_m$ — амплитуда ускорения. Таким образом, из полученных уравнений следует, что амплитуда скорости гармонических колебаний пропорциональна частоте, а амплитуда ускорения — квадрату частоты колебания:
Фаза колебаний
Фаза колебаний — это аргумент периодически изменяющейся функции, описывающей колебательный или волновой процесс.
Для гармонических колебаний
где $φ=ωt+φ_0$ — фаза колебания, $А$ — амплитуда, $ω$ — круговая частота, $t$ — время, $φ_0$ — начальная (фиксированная) фаза колебания: в момент времени $t=0$ $φ=φ_0$. Фаза выражается в радианах.
Фаза гармонического колебания при постоянной амплитуде определяет не только координату колеблющегося тела в любой момент времени, но и скорость и ускорение, которые тоже изменяются по гармоническому закону (скорость и ускорение гармонических колебаний — это первая и вторая производные по времени функции $X(t)=Acos(ωt+φ_0)$, которые, как известно, снова дают синус и косинус). Поэтому можно сказать, что фаза определяет при заданной амплитуде состояние колебательной системы в любой момент времени.
Два колебания с одинаковыми амплитудами и частотами могут отличаться друг от друга фазами. Так как $ω=<2π>/
Отношение $
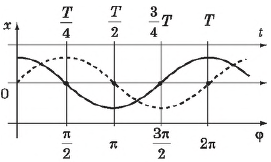
Здесь начальная фаза равна нулю $φ_0=0$. В начальный момент времени амплитуда максимальна. Это соответствует случаю колебаний тела, прикрепленного к пружине (или маятника), которое в начальный момент времени отвели от положения равновесия и отпустили. Описание колебаний, начинающихся из положения равновесия (например, при кратковременном толчке покоящегося шарика), удобнее вести с помощью функции синуса:
Как известно, $cosφ=sin(φ+<π>/<2>)$, поэтому колебания, описываемые уравнениями $x=x_
Сравнивая уравнения свободных колебаний, координаты, скорости и ускорения материальной точки, находим, что колебания скорости опережают по фазе на $<π>/<2>$, а колебания ускорения — на $π$ колебания смещения (координаты).
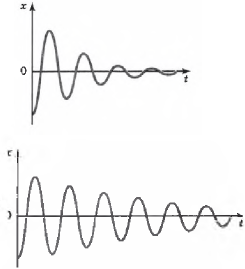
Затухающие колебания
Затухание колебаний — это уменьшение амплитуды колебаний с течением времени, обусловленное потерей энергии колебательной системой.
Свободные колебания всегда являются затухающими колебаниями.
Потери энергии колебаний в механических системах связаны с превращением ее в теплоту вследствие трения и сопротивления окружающей среды.
Так, механическая энергия колебаний маятника расходуется на преодоление сил трения и сопротивления воздуха, переходя при этом во внутреннюю энергию.
Амплитуда колебаний постепенно уменьшается, и через некоторое время колебания прекращаются. Такие колебания называются затухающими.
Чем больше силы сопротивления движению, тем быстрее прекращаются колебания. Например, в воде колебания прекращаются быстрее, чем в воздухе.
Упругие волны (механические волны)
Возмущения, распространяющиеся в пространстве, удаляясь от места их возникновения, называют волнами.
Упругие волны — это возмущения, распространяющиеся в твердой, жидкой и газообразной средах благодаря действию в них сил упругости.
Сами эти среды называют упругими. Возмущение упругой среды — это любое отклонение частиц этой среды от своего положения равновесия.
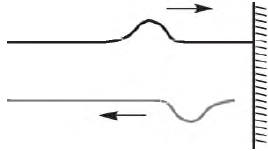
Возьмем, например, длинную веревку (или резиновую трубку) и прикрепим один из ее концов к стене. Туго натянув веревку, резким боковым движением руки создадим на ее незакрепленном конце кратковременное возмущение. Мы увидим, что это возмущение побежит вдоль веревки и, дойдя до стены, отразится назад.
Начальное возмущение среды, приводящее к появлению в ней волны, вызывается действием в ней какого-нибудь инородного тела, которое называют источником волны. Это может быть рука человека, ударившего по веревке, камешек, упавший в воду, и т. д.
Если действие источника носит кратковременный характер, то в среде возникает так называемая одиночная волна. Если же источник волны совершает длительное колебательное движение, то волны в среде начинают идти одна за другой. Подобную картину можно увидеть, поместив над ванной с водой вибрирующую пластину, имеющую наконечник, опущенный в воду.
Необходимым условием возникновения упругой волны является появление в момент возникновения возмущения сил упругости, препятствующих этому возмущению. Эти силы стремятся сблизить соседние частицы среды, если они расходятся, и отдалить их, когда они сближаются. Действуя на все более удаленные от источника частицы среды, силы упругости начинают выводить их из положения равновесия. Постепенно все частицы среды одна за другой вовлекаются в колебательное движение. Распространение этих колебаний и проявляется в виде волны.
В любой упругой среде одновременно существуют два вида движения: колебания частиц среды и распространение возмущения. Волна, в которой частицы среды колеблются вдоль направления ее распространения, называется продольной, а волна, в которой частицы среды колеблются поперек направления ее распространения, называется поперечной.
Продольная волна
Волна, в которой колебания происходят вдоль направления распространения волны, называется продольной.
В упругой продольной волне возмущения представляют собой сжатия и разрежения среды. Деформация сжатия сопровождается возникновением сил упругости в любой среде. Поэтому продольные волны могут распространяться во всех средах (и в жидких, и в твердых, и в газообразных).

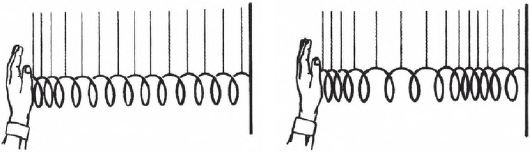
Пример распространения продольной упругой волны изображен на рисунке. По левому концу длинной пружины, подвешенной на нитях, ударяют рукой. От удара несколько витков сближаются, возникает сила упругости, под действием которой эти витки начинают расходиться. Продолжая движение по инерции, они будут продолжать расходиться, минуя положение равновесия и образуя в этом месте разрежение. При ритмичном воздействии витки на конце пружины будут то сближаться, то отходить друг от друга, т. е. колебаться возле своего положения равновесия. Эти колебания постепенно передадутся от витка к витку вдоль всей пружины. По пружине распространятся сгущения и разрежения витков, или упругая волна.
Поперечная волна
Волны, в которых колебания происходят перпендикулярно направлению их распространения, называются поперечными.
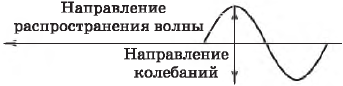
В поперечной упругой волне возмущения представляют собой смещения (сдвиги) одних слоев среды относительно других. Деформация сдвига приводит к появлению сил упругости только в твердых телах: сдвиг слоев в газах и жидкостях возникновением сил упругости не сопровождается. Поэтому поперечные волны могут распространяться только в твердых телах.
Плоская волна
Плоская волна — это волна, у которой направление распространения одинаково во всех точках пространства.
В такой волне амплитуда не меняется со временем (по мере удаления от источника). Получить такую волну можно, если большую пластину, находящуюся в сплошной однородной упругой среде, заставить колебаться перпендикулярно плоскости. Тогда все точки среды, примыкающей к пластине, будут колебаться с одинаковыми амплитудами и одинаковыми фазами. Распространяться эти колебания будут в виде волн в направлении нормали к пластине, причем все частицы среды, лежащие в плоскостях, параллельных пластине, будут колебаться с одинаковыми фазами.
Геометрическое место точек, в которых фаза колебаний имеет одно и то же значение, называется волновой поверхностью, или фронтом волны.
С этой точки зрения плоской волне можно дать и следующее определение.
Волна называется плоской, если ее волновые поверхности представляют совокупность плоскостей, параллельных друг другу.
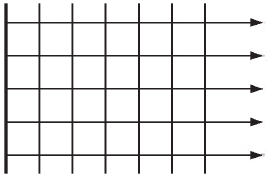
Линия, нормальная к волновой поверхности, называется лучом. Вдоль лучей происходит перенос энергии волны. Для плоских волн лучи — это параллельные прямые.
Уравнение плоской синусоидальной волны имеет вид:
где $s$ — смещение колеблющейся точки, $s_m$ — амплитуда колебаний, $ω$ — циклическая частота, $t$ — время, $х$ — текущая координата, $υ$ — скорость распространения колебаний или скорость волны, $φ_0$ — начальная фаза колебаний.
Сферическая волна
Сферической называется волна, волновые поверхности которой имеют вид концентрических сфер. Центр этих сфер называется центром волны.
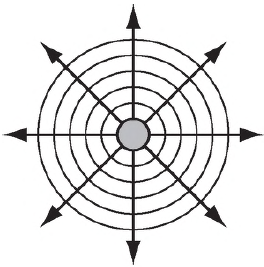
Лучи в такой волне направлены вдоль радиусов, расходящихся от центра волны. На рисунке источником волны является пульсирующая сфера.
Амплитуда колебаний частиц в сферической волне обязательно убывает по мере удаления от источника. Энергия, излучаемая источником, равномерно распределяется по поверхности сферы, радиус которой непрерывно увеличивается по мере распространения волны. Уравнение сферической волны имеет вид:
В отличие от плоской волны, где $s_m=A$ — амплитуда волны постоянная величина, в сферической волне она убывает с расстоянием от центра волны.
Длина и скорость волны
Любая волна распространяется с некоторой скоростью. Под скоростью волны понимают скорость распространения возмущения. Например, удар по торцу стального стержня вызывает в нем местное сжатие, которое затем распространяется вдоль стержня со скоростью около $5$ км/с.
Скорость волны определяется свойствами среды, в которой эта волна распространяется. При переходе волны из одной среды в другую ее скорость изменяется.
Длиной волны называется расстояние, на которое распространяется волна за время, равное периоду колебаний в ней.
Поскольку скорость волны — величина постоянная (для данной среды), то пройденное волной расстояние равно произведению скорости на время ее распространения. Таким образом, чтобы найти длину волны, надо скорость волны умножить на период колебаний в ней:
где $υ$ — скорость волны, $Т$ — период колебаний в волне, $λ$ (греческая буква лямбда) — длина волны.
Формула $λ=υT$ выражает связь длины волны с ее скоростью и периодом. Учитывая, что период колебаний в волне обратно пропорционален частоте $v$, т. е. $T=<1>/
Полученная формула показывает, что скорость волны равна произведению длины волны на частоту колебаний в ней.
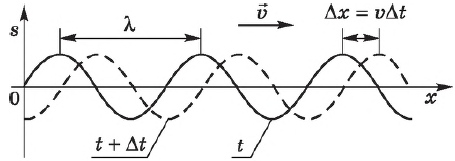
Длина волны — это пространственный период волны. На графике волны длина волны определяется как расстояние между двумя ближайшими точками гармонической бегущей волны, находящимися в одинаковой фазе колебаний. Рисунок — это как бы мгновенные фотографии волн в колеблющейся упругой среде в моменты времени $t$ и $t+∆t$. Ось $х$ совпадает с направлением распространения волны, на оси ординат отложены смещения $s$ колеблющихся частиц среды.
Частота колебаний в волне совпадает с частотой колебаний источника, т. к. колебания частиц в среде являются вынужденными и не зависят от свойств среды, в которой распространяется волна. При переходе волны из одной среды в другую ее частота не изменяется, меняются лишь скорость и длина волны.
Интерференция и дифракция волн
Интерференция волн (от лат. inter — взаимно, между собой и ferio — ударяю, поражаю) — взаимное усиление или ослабление двух (или большего числа) волн при их наложении друг на друга при одновременном распространении в пространстве.
Обычно под интерференционным эффектом понимают тот факт, что результирующая интенсивность в одних точках пространства получается больше, в других — меньше суммарной интенсивности волн.
Интерференция волн — одно из основных свойств волн любой природы: упругих, электромагнитных, в том числе и световых, и др.
Интерференция механических волн
Сложение механических волн — их взаимное наложение — проще всего наблюдать на поверхности воды. Если возбудить две волны, бросив в воду два камня, то каждая из этих волн ведет себя так, как будто другой волны не существует. Аналогично ведут себя звуковые волны от разных независимых источников. В каждой точке среды колебания, вызванные волнами, просто складываются. Результирующее смещение любой частицы среды представляет собой алгебраическую сумму смещений, которые происходили бы при распространении одной из волн в отсутствие другой.
Если одновременно в двух точках $О_1$ и $O_2$ возбудить в воде две когерентные гармонические волны, то будут наблюдаться гребни и впадины на поверхности воды, не меняющиеся со временем, т. е. возникнет интерференция.
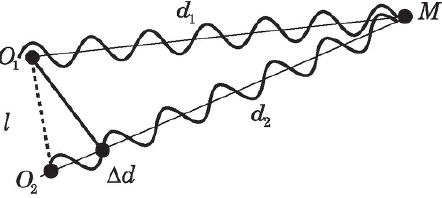
Условием возникновения максимума интенсивности в некоторой точке $М$, находящейся на расстояниях $d_1$ и $d_2$ от источников волн $О_1$ и $О_2$, расстояние между которыми $l 50—60$ мс. Тогда возникает многократное эхо. Некоторые из таких явлений приобрели мировую известность. Так, например, скалы, расположенные в форме круга возле Адерсбаха в Чехии, в определенном месте повторяют $7$ слогов, а в замке Вудсток в Англии эхо отчетливо повторяет $17$ слогов!
Слово «эхо» связано с именем горной нимфы Эхо, которая, согласно древнегреческой мифологии, безответно была влюблена в Нарцисса. От тоски по возлюбленному Эхо высохла и окаменела так, что от нее остался лишь голос, способный повторять окончания произнесенных в ее присутствии слов.
Почему не слышно эхо в небольшой квартире? Ведь и в ней звук должен отражаться от стен, потолка, пола. Дело в том, что время $t$, за которое звук проходит расстояние, скажем, $s=6м$, распространяясь со скоростью $υ=340$ м/с, равно:
А это значительно меньше времени ($0.06$ с), необходимого, чтобы услышать эхо.
Увеличение длительности звука, вызванное его отражениями от различных препятствий, называется реверберацией. Реверберация велика в пустых помещениях, где она приводит к гулкости. И наоборот, помещения с мягкой обивкой стен, драпировками, шторами, мягкой мебелью, коврами, а также наполненные людьми хорошо поглощают звук, и потому реверберация в них незначительна.
Скорость звука
Для распространения звука необходима упругая среда. В вакууме звуковые волны распространяться не могут, так как там нечему колебаться. В этом можно убедиться на простом опыте. Если поместить под стеклянный колокол электрический звонок, то по мере выкачивания из-под колокола воздуха звук от звонка будет становиться все слабее и слабее, пока не прекратится совсем.
Известно, что во время грозы мы видим вспышку молнии и лишь через некоторое время слышим раскаты грома. Это запаздывание возникает из-за того, что скорость звука в воздухе значительно меньше скорости света, идущего от молнии.
Скорость звука в воздухе впервые была измерена в 1636 г. французским ученым М. Мерсенном. При температуре $20°$С она равна $343$ м/с, т. е. $1235$ км/ч. Заметим, что именно до такого значения уменьшается на расстоянии $800$ м скорость пули, вылетевшей из автомата Калашникова. Начальная скорость пули $825$ м/с, что значительно превышает скорость звука в воздухе. Поэтому человек, услышавший звук выстрела или свист пули, может не беспокоиться: эта пуля его уже миновала. Пуля обгоняет звук выстрела и достигает своей жертвы до того, как приходит этот звук.
Скорость звука в газах зависит от температуры среды: с увеличением температуры воздуха она возрастает, а с уменьшением — убывает. При $0°$С скорость звука в воздухе составляет $332$ м/с.
В разных газах звук распространяется с разной скоростью. Чем больше масса молекул газа, тем меньше скорость звука в нем. Так, при температуре $0°$С скорость звука в водороде составляет $1284$ м/с, в гелии — $965$ м/с, а в кислороде — $316$ м/с.
Скорость звука в жидкостях, как правило, больше скорости звука в газах. Скорость звука в воде впервые была измеренав 1826 г. Ж. Колладоном и Я. Штурмом. Свои опыты они проводили на Женевском озере в Швейцарии. На одной лодке поджигали порох и одновременно ударяли в колокол, опущенный в воду. Звук этого колокола, опущенного в воду, улавливался на другой лодке, которая находилась на расстоянии $14$ км от первой. По интервалу времени между вспышкой светового сигнала и приходом звукового сигнала определили скорость звука в воде. При температуре $8°$С она оказалась равной $1440$ м/с.
Скорость звука в твердых телах больше, чем в жидкостях и газах. Если приложить ухо к рельсу, то после удара по другому концу рельса слышно два звука. Один из них достигает уха по рельсу, другой — по воздуху.
Хорошей проводимостью звука обладает земля. Поэтому в старые времена при осаде в крепостных стенах помещали «слухачей», которые по звуку, передаваемому землей, могли определить, ведет ли враг подкоп к стенам или нет. Прикладывая ухо к земле, также следили за приближением вражеской конницы.
Твердые тела хорошо проводят звук. Благодаря этому люди, потерявшие слух, иной раз способны танцевать под музыку, которая доходит до слуховых нервов не через воздух и наружное ухо, а через пол и кости.
Скорость звука можно определить, зная длину волны и частоту (или период) колебаний:
Инфразвук
Звуковые волны с частотой, меньшей $16$ Гц, называются инфразвуком.
Инфразвуковые волны человеческое ухо не воспринимает. Несмотря на это, они способны оказывать на человека определенное физиологическое воздействие. Объясняется это действие резонансом. Внутренние органы нашего тела имеют достаточно низкие собственные частоты: брюшная полость и грудная клетка — $5—8$ Гц, голова — $20—30$ Гц. Среднее значение резонансной частоты для всего тела составляет $6$ Гц. Имея частоты того же порядка, инфразвуковые волны заставляют наши органы вибрировать и при очень большой интенсивности способны привести к внутренним кровоизлияниям.
Специальные опыты показали, что облучение людей достаточно интенсивным инфразвуком может вызвать потерю чувства равновесия, тошноту, непроизвольное вращение глазных яблоки т. д. Например, на частоте $4—8$ Гц человек ощущает перемещение внутренних органов, а на частоте $12$ Гц — приступ морской болезни.
Рассказывают, что однажды американский физик Р. Вуд (прослывший среди коллег большим оригиналом и весельчаком) принес в театр специальный аппарат, излучающий инфразвуковые волны, и, включив его, направил на сцену. Никакого звука никто не услышал, однако с актрисой случилась истерика.
Резонансным влиянием на человеческий организм низкочастотных звуков объясняется и возбуждающее действие современной рок-музыки, насыщенной многократно усиленными низкими частотами барабанов, бас-гитар.
Инфразвук не воспринимается человеческим ухом, однако его способны слышать некоторые животные. Например, медузы уверенно воспринимают инфразвуковые волны с частотой $8—13$ Гц, возникающие при шторме в результате взаимодействия потоков воздуха с гребнями морских волн. Достигая медуз, эти волны заранее (за $15$ часов!) «предупреждают» о приближающемся шторме.
Источниками инфразвука могут служить грозовые разряды, выстрелы, извержения вулканов, работающие двигатели реактивных самолетов, ветер, обтекающий гребни морских волн, и т. д. Для инфразвука характерно малое поглощение в различных средах, вследствие чего он может распространяться на очень большие расстояния. Это позволяет определить места сильных взрывов, положение стреляющего орудия, осуществлять контроль за подземными ядерными взрывами, предсказывать цунами и т. д.
Ультразвук
Упругие волны с частотой выше $20$ кГц называются ультразвуком.
Ультразвук в животном мире. Ультразвук, как и инфразвук, не воспринимается человеческим ухом, однако его способны излучать и воспринимать некоторые животные. Так, например, дельфины благодаря этому уверенно ориентируются в мутной воде. Посылая и принимая возвратившиеся назад ультразвуковые импульсы, они способны на расстоянии $20—30$ м обнаружить даже маленькую дробинку, осторожно опущенную в воду. Ультразвук помогает и летучим мышам, которые плохо видят или вообще ничего не видят. Издавая с помощью своего слухового аппарата ультразвуковые волны (до $250$ раз в секунду), они способны ориентироваться в полете и успешно ловить добычу даже в темноте. Любопытно, что у некоторых насекомых в ответ на это выработалась особая защитная реакция: отдельные виды ночных бабочек и жуков тоже оказались способными воспринимать ультразвуки, издаваемые летучими мышами, и, услышав их, они тут же складывают крылья, падают вниз и замирают на земле.
Ультразвуковые сигналы используются и некоторыми китами. Эти сигналы позволяют им охотиться на кальмаров при полном отсутствии света.
Установлено также, что ультразвуковые волны с частотой более $25$ кГц вызывают болезненные ощущения у птиц. Это используется, например, для отпугивания чаек от водоемовс питьевой водой.
Использование ультразвука в технике. Ультразвук находит широкое применение в науке и технике, где его получают с помощью различных механических (например, сирена) и электромеханических устройств.
Источники ультразвука устанавливают на кораблях и подводных лодках. Посылая короткие импульсы ультразвуковых волн, можно уловить их отражения от дна или каких-либо других предметов. По времени запаздывания отраженной волны можно судить о расстоянии до препятствия. Использующиеся при этом эхолоты и гидролокаторы позволяют измерять глубину моря, решать различные навигационные задачи (плавание вблизи скал, рифов и т. д.), осуществлять рыбопромысловую разведку (обнаруживать косяки рыб), а также решать военные задачи (поиск подводных лодок противника, бесперископные торпедные атаки и др.).
В промышленности по отражению ультразвука от трещин в металлических отливках судят о дефектах в изделиях.
Ультразвуки дробят жидкие и твердые вещества, образуя различные эмульсии и суспензии.
С помощью ультразвука удается осуществить пайку алюминиевых изделий, что с помощью других методов сделать не удается (так как на поверхности алюминия всегда имеется плотный слой оксидной пленки). Наконечник ультразвукового паяльника не только нагревается, но и совершает колебанияс частотой около $20$ кГц, благодаря чему оксидная пленка разрушается.
Преобразование ультразвука в электрические колебания, а их затем в свет позволяет осуществить звуковидение. При помощи звуковидения можно видеть предметы в непрозрачной для света воде.
В медицине при помощи ультразвука осуществляют сварку сломанных костей, обнаруживают опухоли, осуществляют диагностические исследования в акушерстве и т. д. Биологическое действие ультразвука (приводящее к гибели микробов) позволяет использовать его для пастерилизации молока, стерилизации медицинских инструментов.
Уравнения равновесия жидкости
Выделим в покоящейся жидкости вокруг точки А элементарный объем в виде параллелепипеда (рис. 2.4) и составим условия его равновесия.
На этот параллелепипед выделенной жидкости действуют поверхностные силы (силы гидростатического давления) и объемные силы.
Примем, что давление в центре параллелепипеда (в точке А) равно pА. Тогда давление в центре левой грани p1 будет
Сила давления на всю левую грань

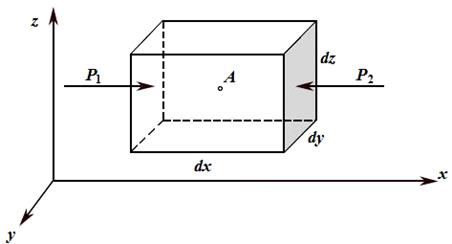
Аналогично, сила давления на правую грань
Здесь  – изменение гидростатического давления по оси x на единицу длины. Знак этой величины определяется направлением перемещения от точки А к соответствующим граням: если перемещение противоположно направлению оси x – знак «минус», если совпадает с направлением оси x – знак «плюс».
– изменение гидростатического давления по оси x на единицу длины. Знак этой величины определяется направлением перемещения от точки А к соответствующим граням: если перемещение противоположно направлению оси x – знак «минус», если совпадает с направлением оси x – знак «плюс».
Проекция объемных сил на ось x будет равна 
Тогда уравнение равновесия (покоя) выделенного объема жидкости можно записать в виде

Подставляя значения P1 и P2 и приводя подобные члены, имеем

Сокращая на объем параллелепипеда  , получим уравнение для единицы объема жидкости
, получим уравнение для единицы объема жидкости
Уравнения для других осей запишем по аналогии:
Эти уравнения называются уравнениями Эйлера. В них заключаются необходимые и достаточные условия равновесия жидкости, так как если эти условия выполняются в любой точке жидкости, то каждая частица жидкости находится в равновесии.
Обычно систему дифференциальных уравнений равновесия (уравнения Эйлера) записывают в следующем виде:
 | (2.1) |
Уравнения Эйлера показывают, что в состоянии покоя массовые силы, действующие на каждую частичку жидкости, уравновешиваются поверхностными силами (градиентом давления).
Для вывода основного уравнения гидростатики необходимо проинтегрировать полученные дифференциальные уравнения равновесия (2.1).
Умножим каждый член первого из уравнений Эйлера на dx, второго и третьего – на dy и dz соответственно и сложим почленно. В результате получим
 | (2.2) |
Очевидно, что правая часть уравнения (2.2) представляет собой полный дифференциал давления dp, поскольку давление является функцией координат  . Но если правая часть уравнения есть полный дифференциал, то, для того чтобы уравнение оставалось справедливым, и левая его часть должна быть полным дифференциалом какой-то функции. Тогда в случае однородной несжимаемой жидкости, то есть, когда ρ = const, существует некая функция координат U = f (x, y, z) которая обладает следующим свойством:
. Но если правая часть уравнения есть полный дифференциал, то, для того чтобы уравнение оставалось справедливым, и левая его часть должна быть полным дифференциалом какой-то функции. Тогда в случае однородной несжимаемой жидкости, то есть, когда ρ = const, существует некая функция координат U = f (x, y, z) которая обладает следующим свойством:
Силы, для которых такая функция существует, называются силами, имеющими потенциал. Функция U называется силовой потенциальной функцией.
Тогда уравнение равновесия (2.2) можно записать в виде
 | (2.3) |
Из этого можно сделать вывод, что несжимаемая жидкость может находиться в равновесии только под действием объемных сил, имеющих потенциал.
Как известно, к таким силам относится, например, сила тяжести. Если на жидкость действует только одна объемная сила – сила тяжести, то можем записать

Уравнение равновесия тогда примет вид:
Считая ρ = const, интегрируем и получаем
 или или  |
Отсюда видно, что в покоящейся жидкости, на которую действуют только силы тяжести, давление есть функция только одной вертикальной координаты – z. Это уравнение, записанное в виде
 , , | (2.4) |
называют основным уравнением гидростатики.
Константу в уравнении (2.4) определим из граничного условия.
Расположим начало координат на поверхности жидкости, где p = p0, при z = 0. Тогда имеем: const = – p0.
Используем новую переменную – глубину погружения от поверхности жидкости h = – z. Тогда окончательно получим уравнение для гидростатического давления:
 | (2.5) |
Таким образом, давление в любой точке жидкости, находящейся под действием силы тяжести, складывается из давления на поверхности и произведения объемного веса жидкости на глубину погружения этой точки. Из уравнения видно, что давление изменяется линейно с глубиной погружения.
Дата добавления: 2017-04-05 ; просмотров: 6514 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
http://examer.ru/ege_po_fizike/teoriya/sila_arhimeda_2017
http://poznayka.org/s88553t1.html